Область техники, к которой относится изобретение
Настоящее изобретение относится к способу управления движением летательных аппаратов.
Уровень техники
Развитие беспилотных летательных аппаратов и гипотеза о том, что вскоре даже появятся полетные системы с автопилотами, которые заполонят небо, создает проблему аэронавигационного управления всеми этими летательными аппаратами.
Существует множество приложений для визуального полета, но все они ограничиваются тем, что предлагают картографию районов пролета и визуализируют маршрут, заданный пилотом.
Существует много приложений, которые позволяют автомобилям следовать по дорожному маршруту, чтобы добраться до места назначения, среди них есть и такие, которые также предлагают дополнительную опцию: иметь возможность видеть все транспортные средства вблизи от пользователя, использующие то же самое приложение.
Например, существуют приложения для автомобильного движения, которые не только позволяют пользователю видеть другие транспортные средства, использующие то же самое приложение, но и позволяют пользователю быть замеченным, если он/она дал согласие на эту функциональность.
Цель настоящего изобретения заключается в том, чтобы предложить способ и систему управления летательными аппаратами, на которые не распространяются правила визуального полета (VFR).
Еще одна цель изобретения заключается в том, чтобы обеспечить доступность одних из важнейших данных в области полета, а именно данных о наличии других летательных аппаратов в воздушном пространстве и их навигационных данных.
Сущность изобретения
Эти и другие цели, которые будут очевидны по прочтении настоящего описания, достигают посредством способа управления движением летательных аппаратов, содержащего следующие этапы, на которых:
- получают данные, касающиеся местоположения летательных аппаратов;
- создают карту движения летательных аппаратов в режиме реального времени на основе данных о местоположении;
- проверяют возможность столкновения летательных аппаратов на основе карты; и
- в случае если такая проверка дает положительный результат, отправляют предупреждение о возможном столкновении на летательные аппараты;
причем упомянутый способ осуществляют посредством RTS-сервера (сервера реального времени), выполненного с возможностью осуществлять связь с навигационными приборами, расположенными на борту летательных аппаратов и оснащенными приложением, выполненным с возможностью передавать данные о местоположении летательных аппаратов на RTS-сервер и определять идеальный маршрут и идеальную высоту полета в соответствии с правилами визуального полета (VFR) и областями пролета, определенными аэронавигационным картографированием, причем упомянутое приложение взаимодействует с системой управления полетом летательных аппаратов.
Преимущество этого варианта осуществления изобретения заключается в том, что он не только позволяет летательному аппарату видеть другие летательные аппараты и быть замеченным ими, но также указывает высоту полета, уровень земли, скорость, курс и расчетное время захода на посадку, а также все данные, связанные или коррелированные с данными, касающимися положения летательного аппарата.
Изобретение также относится к системе управления движением летательных аппаратов, причем система содержит RTS-сервер, выполненный с возможностью удаленной связи с навигационными приборами летательных аппаратов, находящимися на борту летательных аппаратов и оснащенными приложением, причем упомянутое приложение выполнено с возможностью передавать данные о местоположении летательных аппаратов на RTS-сервер, а также определять идеальный маршрут и идеальный эшелон в соответствии с правилами визуального полета (VFR) и областями пролета, определенными аэронавигационным картографированием, причем упомянутое приложение может сопрягаться с системой управления полетом летательного аппарата, и при этом RTS-сервер пригоден для приема данных о местоположении летательного аппарата для создания карты движения летательных аппаратов в реальном времени на основе данных о местоположении и для проверки на основе этой карты возможности столкновения летательных аппаратов и для отправки предупреждения о столкновении летательным аппаратам в случае, если результат проверки положительный.
Дополнительная функциональность состоит из алгоритмов предотвращения столкновений и помощи полету, включая функциональность для самовращения или планирующей посадки летательного аппарата.
Дополнительные характеристики изобретения могут быть выведены из зависимых пунктов формулы изобретения.
Краткое описание чертежей
Дополнительные характеристики и преимущества изобретения станут очевидными по прочтении последующего описания, приведенного посредством примеров и без ограничения с использованием прилагаемых чертежей, на которых:
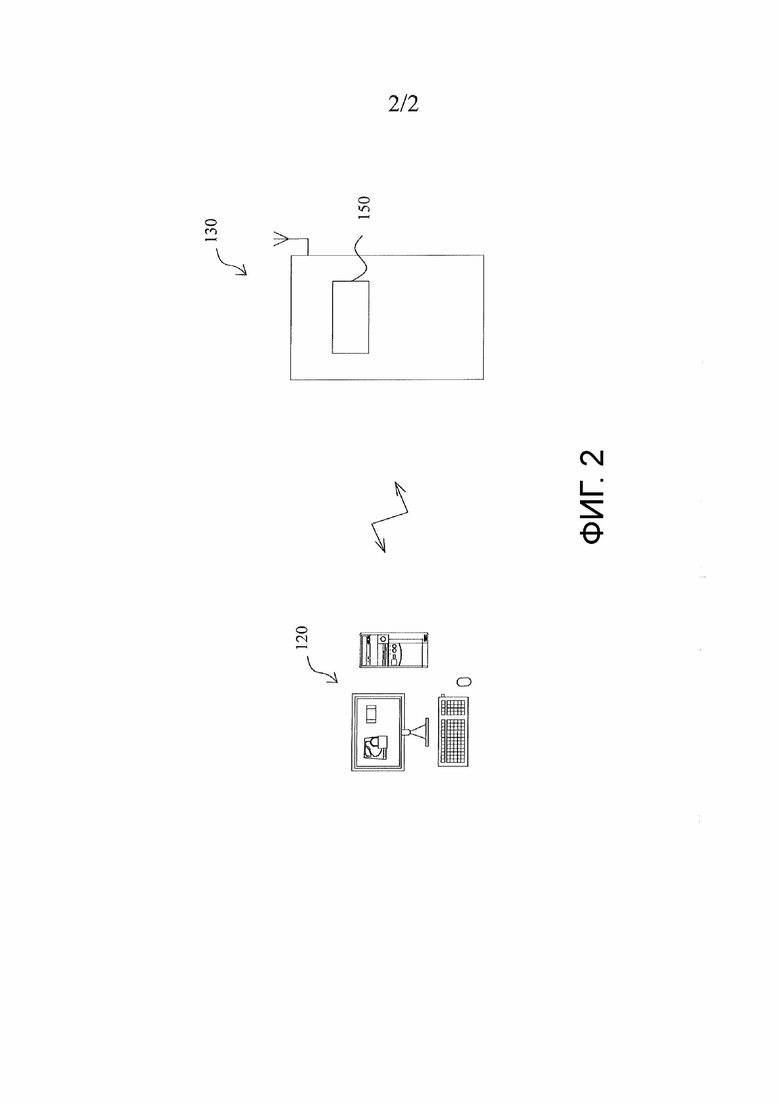
- на фиг. 1 схематично показан пример воздушного трафика, охватывающего часть воздушного пространства, где рассматриваемый летательный аппарат применяет способ в соответствии с изобретением; и
- на фиг. 2 схематично показан навигационный прибор на борту летательного аппарата, причем упомянутый прибор выполнен с возможностью реализовывать способ в соответствии с изобретением.
Подробное описание изобретения
Обратимся к фиг. 1, на которой приведена схематичная иллюстрация примера воздушного трафика, охватывающего часть воздушного пространства 100, где рассматриваемый летательный аппарата использует способ и систему в соответствии с изобретением.
Этот способ позволяет создать сервис отображения воздушного трафика, охватывающего заданное воздушное пространство.
Согласно системе в соответствии с изобретением, каждый летательный аппарат может передавать свое местоположение на RTS-сервер (Real Time Server, сервер реального времени) 120, выполненный с возможностью принимать данные о местоположении, чтобы на основе данных о местоположении создать карту движения летательных аппаратов в реальном времени.
Пример на фиг. 1 показывает три самолета Р1, Р2 и Р3, два беспилотных летательных аппарата (без пилота на борту) D1, D2 и вертолет Е1, а также диспетчерскую вышку 110.
Эти летательные аппараты были показаны на примере, чтобы показать, что система в соответствии с изобретением может работать как с летательными аппаратами, такими как самолеты и вертолеты, которыми управляет один или два пилота на борту, так и с летательными аппаратами с автоматическим или дистанционным управлением, такими как беспилотные летательные аппараты.
Кроме того, система может работать как с летательными аппаратами, такими как самолеты, которые всегда должны двигаться вперед для создания необходимой подъемной силы, так и с такими летательными аппаратами, как вертолеты или беспилотные летательные аппараты, которые также могут в определенных ситуациях сохранять фиксированное положение в воздушном пространстве в течение определенного времени или стационарное положение полета, также называемое «зависанием».
Каждый летательный аппарат P1, P2, P3, D1, D2 и E1 может иметь на борту свой собственный навигационный прибор 130 (показанный, например, на фиг. 2), который может осуществлять связь с RTS-сервером 120 и который может запускать приложение, охватываемое настоящим изобретением.
В свою очередь, RTS-сервер 120 может принимать положение летательного аппарата от навигационного прибора 130 каждого летательного аппарата, а также другие данные.
Например, самолет P1 может находиться в положении, заданном координатами (XP1, YP1, ZP1) в определенное время и может передавать свое положение на RTS-сервер 120.
Соответственно, RTS-сервер 120 может записывать положение, полученное от самолета P1, и связывать его со значением временной метки, указывающей момент времени, в который было записано положение самолета P1.
Последовательные данные о местоположении, полученные через короткие промежутки времени друг за другом для одного и того же летательного аппарата, могут позволить RTS-серверу 120 рассчитать скорость летательного аппарата P1 и его предполагаемый маршрут.
Расчет предполагаемых маршрутов для различных летательных аппаратов может быть выполнен RTS-сервером 120 в сочетании с собственным алгоритмом предотвращения столкновений, основанным на карте движения летательных аппаратов в реальном времени, созданной RTS-сервером 120, с целью проверки правильности выполнения полетов и генерирования аварийных сигналов, если два (или более) летательных аппарата следуют по маршрутам, которые могут привести к их столкновению.
Затем, RTS-сервер 120 может выполнить алгоритмы обработки, определяющие параметры, необходимые для управления летательным аппаратом, чтобы предотвратить маршруты возможных столкновений с участием летательного аппарата, находящегося в полете в данном воздушном пространстве 100, как было упомянуто выше, или нарушения воздушного пространства, такого как CTR (диспетчерская зона), Pzone (запрещенная зона или запрещенные зоны) и все те области, предусмотренные на аэронавигационном картографировании, через которые летательному аппарату нельзя пролетать или которые подпадают под специальные правила пролета.
После завершения этих проверок, если результат одной или нескольких из них является положительным, то соответствующим летательным аппаратам выдают предупреждение о возможном столкновении.
В дополнение к этому RTS-сервер 120 может предоставить всю информацию о летательном аппарате, находящемся в полете, приложению 150, а также определяет и указывает маршруты в непосредственной близости от летательного аппарата и указывает состояния оповещения в случае несовместимых маршрутов или гипотетического ожидаемого столкновения, одновременно давая уведомление всем соответствующим летательным аппаратам.
В случае ожидаемого столкновения алгоритм генерирует сигнал тревоги и указывает рассматриваемому летательному аппарату маршрут и эшелон, которые необходимо соблюдать, чтобы избежать возможных столкновений, принимая во внимание все летательные аппараты, находящиеся в полете в соответствующем районе.
Для подключения к RTS-серверу 120 приложение 150 может использовать телефонные соединения 3G, 4G или другие существующие протоколы для беспроводных соединений.
Приложение 150 может взаимодействовать с системой GPS для передачи на RTS-сервер 120 данных GPS о позиционировании летательного аппарата и плане полета.
Это приложение 150 полезно и необходимо также с учетом будущего рынка беспилотных летательных аппаратов и прежде всего со ссылкой на итальянскую патентную заявку № 102017000108804 от 29.08.2017 года, которая, конечно, даст большой толчок развитию авиации.
Следует также надеяться, что производителям беспилотных летательных аппаратов придется позаботиться о том, чтобы полеты не могли начаться до тех пор, пока не будет установлено соединение RTS-сервера 120 с приложением 150, являющимся объектом настоящего изобретения, тем самым обеспечивая эффективное управление воздушным пространством.
Как правило, RTS-сервер 120 способен управлять всей информацией, полученной приложением 150, такой как:
Данные о самолете:
типология
отметки (если есть) или данные о самолете
план полета
командир воздушного судна
число пассажиров
место отправления или взлета
время отправления или взлета
пункт назначения
точки маршрута
эшелон
барометрическая высота
высота над землей
скорость, определенная трубкой Пито
вычисленная скорость с данными местоположения, переданными приложением
ожидаемая приблизительная скорость между самолетами
расчетное время сближения самолетов
определение маршрута столкновения
определение сигналов тревоги о возможности столкновения
определение уровней тревоги
цветовая, анимированная и звуковая сигнализация тревоги.
Определение неприкосновенного объема безопасности вокруг каждого летательного аппарата (куб, форму и размер которого необходимо определить)
Передача всех данных на диспетчерские вышки 110 различных аэропортов также позволяет осуществлять подключение к RTS-серверу 120 со стороны системы управления полетами аэропорта.
RTS-сервер 110 может быть размещен в любом удаленном месте.
Вместо этого пилот самолета на своем устройстве 130 после активации приложения 150 может видеть следующее:
2D или 3D картографию
при этом его/ее собственный самолет интуитивно подсвечивается.
Для всех летательных аппаратов в непосредственной близости и в соответствии с выбранным масштабом карты:
- маршрут, по которому они следуют,
- маршрут, оцененный приложением,
- высота,
- расстояние от поверхности земли,
- детектированная скорость,
- расстояние в авиационных милях или километрах или в других единицах измерения,
- время сближения с его/ее самолетом,
- возможный альтернативный маршрут в случае столкновения.
Приложение 150 также позволяет отслеживать все полетные данные.
Еще одной особенностью изобретения является то, что приложение 150 может быть сопряжено с системой управления полетом летательного аппарата.
Как также упоминалось ниже, приложение 150 может обеспечить полное управление аэронавигацией в случае беспилотных летательных аппаратов. Однако ничто не препятствует тому, чтобы в особых ситуациях приложение 150 осуществляло это управление также и на летательном аппарате, управляемом пилотом, например в случае сигнализации о возможности столкновения или болезни пилота или в иных случаях, поскольку принцип действия приложения 150 всегда один и тот же.
Таким образом, изобретение конкретизирует новый способ полетов, который может быть определен правилами VIFR (правила визуального полета и полета по приборам), т.е. совмещением правил полета по VFR с безопасностью полета по приборам IFR.
Приложение 150 также позволяет инновационным способом контролировать возможное самовращение винтокрылого летательного аппарата, предоставляя пилоту данные о сближении с землей и предупреждая его, когда расстояние оптимально для проведения финального выравнивания (или отмены) для посадки.
В случае беспилотных самолетов всей процедурой управляет приложение 150, подключенное к системе управления полетом самолета.
Таким образом, изобретение позволяет полностью управлять аэронавигацией беспилотных летательных аппаратов.
Оно предусматривает множество активных функций, а именно возможность воздействия на управление полетом летательного аппарата.
В частности, сразу после составления плана полета (место вылета и пункт назначения, часы взлета и т.д.) пользователем или оператором летательного аппарата приложение 150 определяет идеальный маршрут и эшелон в соответствии с правилами VFR (правила визуального полета) и районами пролета, определенными аэронавигационным картографированием.
В случае предупреждения о возможном столкновении приложение 150 изменяет маршрут и эшелон беспилотного летательного аппарата, чтобы предотвратить вероятное событие.
Оно также обеспечивает помощь и аэронавигационное управление пилотируемым самолетом.
После того, как пилотом был определен план полета (место вылета и пункт назначения, время взлета и т.д.), приложение 150 определяет план полета с идеальным маршрутом и эшелоном в соответствии с правилами полета VFR (правила визуального полета) и с районами пролета, определенными аэронавигационной картографией.
В случае предупреждения о возможном столкновении приложение 150 сообщает пилоту новый маршрут и эшелон, чтобы предотвратить вероятное событие.
Еще одним преимуществом изобретения является то, что оно устраняет необходимость установки транспондеров на летательные аппараты, будь то беспилотные летательные аппараты или пилотируемые летательные аппараты.
Приложение 150 может передавать сообщения и данные о полете и данные о самолете на соответствующие диспетчерские вышки, если это требуется и/или разрешено.
Приложение 150 является единственной системой, способной управлять аэронавигацией беспилотных летательных аппаратов так, чтобы она не мешала аэронавигации пилотируемых самолетов.
Приложение 150 становится диспетчерской вышкой для самого пилота, а его алгоритмы на RTS-сервере 120 становятся диспетчерами полета с возможностью модификации активного управления полетом для беспилотных летательных аппаратов и с возможностью оказания помощи и управления полетом и предотвращения столкновений для пилотируемых самолетов.
В описанное выше изобретение могут быть внесены модификации или усовершенствования по зависящим от обстоятельств или конкретным причинам, но не выходя за пределы объема изобретения, определенного формулой изобретения, приведенной ниже.

Группа изобретений относится к способу и системе управления движением летательных аппаратов. Для управления движением летательных аппаратов посредством использования определенным образом сервера реального времени (RTS-сервера) принимают данные о местоположении летательных аппаратов, создают карту их движения в режиме реального времени, проверяют возможность их столкновения, в случае положительного результата отправляют предупреждение о возможном столкновении на летательные аппараты. Система управления содержит RTS-сервер, выполненный с возможностью удаленной связи с навигационными приборами летательных аппаратов, находящихся на борту летательных аппаратов и оснащенных приложением, выполненным с возможностью передавать данные об их местоположении на RTS-сервер, определять необходимый маршрут и уровень полета в соответствии с правилами полета, а также выполненных с возможностью сопряжения с системой управления полетом. Обеспечивается повышение безопасности полетов летательных аппаратов без использования правил визуального полета (VFR). 2 н. и 7 з.п. ф-лы, 2 ил.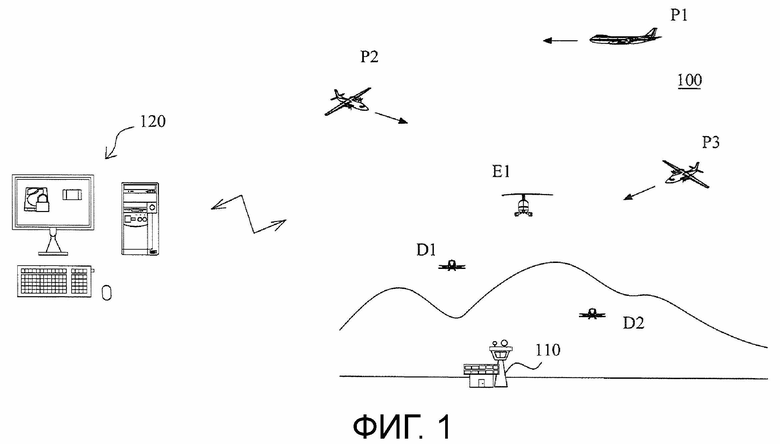
1. Способ управления движением летательных аппаратов, содержащий этапы, на которых принимают данные, касающиеся местоположения летательных аппаратов; создают карту движения летательных аппаратов в режиме реального времени на основе указанных данных местоположения; проверяют возможность столкновения летательных аппаратов на основе карты; и в случае если такая проверка дает положительный результат, отправляют предупреждение о возможном столкновении на летательные аппараты; при этом упомянутый способ осуществляют посредством сервера реального времени (RTS-сервера) (120), выполненного с возможностью осуществлять связь с навигационными приборами (130), расположенными на борту летательных аппаратов и оснащенными приложением (150), выполненным с возможностью передавать данные о положении летательных аппаратов на RTS-сервер (120) и определять идеальный маршрут и идеальную высоту полета в соответствии с правилами визуального полета (VFR) и областями пролета, определенными аэронавигационным картографированием, причем упомянутое приложение взаимодействует с системой управления полетом летательных аппаратов.
2. Способ по п. 1, в котором RTS-сервер (120) способен выполнять алгоритмы обработки, которые определяют параметры, необходимые для управления летательным аппаратом, чтобы избежать незаконных нарушений контролируемых воздушных пространств или воздушных пространств, подпадающих под действие конкретных правил полета.
3. Способ по п. 1, в котором RTS-сервер (120) способен предоставлять информацию о летательных аппаратах, летящих в пределах воздушного пространства (100), приложению (150), работающему на навигационных приборах (130) на борту летательных аппаратов, летящих в упомянутом воздушном пространстве (100), чтобы указывать маршруты, по которым следуют летательные аппараты, и состояния тревоги в случае несовместимых маршрутов или прогнозируемого столкновения, чтобы предупредить все затрагиваемые летательные аппараты.
4. Способ по п. 1, в котором приложение (150), работающее на навигационном приборе (130) летательного аппарата, способно подключаться к системе GPS, чтобы сообщать RTS-серверу (120) GPS-данные о позиционировании летательного аппарата и плане полета.
5. Способ по п. 1, в котором приложение (150), работающее на навигационном приборе (130) летательного аппарата, способно определять неприкосновенное пространство безопасности вокруг самого летательного аппарата.
6. Способ по п. 1, в котором RTS-сервер (120) способен передавать данные на диспетчерские вышки (110) различных аэропортов и способен допускать подключение к RTS-серверу (120) посредством системы управления полетами аэропорта.
7. Способ по п. 1, в котором приложение (150), работающее на навигационном приборе (130) летательного аппарата, способно подключаться к системе управления полетом летательного аппарата.
8. Способ по п. 7, в котором приложение (150), работающее на навигационном приборе (130) винтокрылого летательного аппарата, способно управлять самовращением винтокрылого летательного аппарата, предоставляя данные о сближении с землей и предупреждение, если расстояние является оптимальным для выполнения конечного выравнивания для посадки.
9. Система управления движением летательных аппаратов, содержащая RTS-сервер (120), выполненный с возможностью удаленной связи с навигационными приборами (130) летательных аппаратов, находящихся на борту летательных аппаратов и оснащенных приложением (150), причем упомянутое приложение выполнено с возможностью передавать данные о местоположении летательных аппаратов на RTS-сервер (120), а также определять идеальный маршрут и идеальный уровень полета в соответствии с правилами визуального полета (VFR) и областями пролета, определенными аэронавигационным картографированием, причем упомянутое приложение является сопрягаемым с системой управления полетом летательного аппарата, и при этом RTS-сервер (120) является пригодным для приема данных о местоположении летательного аппарата для создания карты движения летательных аппаратов в реальном времени на основе данных о местоположении и пригодным для проверки на основе указанной карты возможности столкновения летательных аппаратов и для отправки предупреждения о столкновении летательным аппаратам в случае, если результат проверки положительный.
| US 5867804 A1, 02.02.1999 | |||
| WO 2008035981 A3, 27.03.2008 | |||
| US 9488478 B2, 08.11.2016 | |||
| СИСТЕМА ОБХОДА ОТ ПРЕПЯТСТВИЙ ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА С НЕСУЩИМ ВИНТОМ | 2004 |
|
RU2312797C2 |
| WO 2002099769 A1, 12.12.2002. | |||

