Область техники
Изобретение относится к области сельскохозяйственного машиностроения, может быть использовано для повышения эффективности и качества обработки поля машинно-тракторным агрегатом.
Уровень техники
Известен способ управления навесным устройством, выполненным с возможностью подъема и опускания рабочего оборудования. При помощи двухпозиционных электромагнитных клапанов осуществляется подъем и опускание навесного оборудования. Данный способ позволяет увеличить быстродействие системы за счет отсутствия нейтрального положения в клапанах. Недостатком данного способа является сложность конструкции, в которой из-за большого количества гидравлических соединений и клапанов ухудшается надежность системы [1].
Известен способ управления навесным оборудованием при помощи двух электромагнитных клапанов и нерегулируемого насоса. Данный способ позволяет управлять подъемом навесного оборудования с минимальными затратами энергии. Недостатком данной системы является то, что орудие опускается только под собственным весом, и управлять процессом опускания невозможно [2].
Известна интеллектуальная система управления гидравлическим сцепным устройством, содержащая гидравлический распределитель, который состоит из корпуса и стержня клапана, расположенного в корпусе клапана, при этом две смежные секции штока клапана образованы коническими поверхностями для регулирования скорости подъема и опускания. Когда происходит процесс поднятия и опускания орудия, между штоком и корпусом клапана на конической поверхности образуется зазор, величина которого определяет скорость протекания процесса. Осевое смещение стержня клапана контролируется посредством электрического блока управления, так что дроссельный зазор может быть изменен, тем самым обеспечивая возможность повысить или понизить скорость опускания сельскохозяйственного орудия. В нейтральном состоянии запорный клапан закрывается под действием возвратной пружины, тем самым запрещая нерегулируемый подъем груза сельскохозяйственного орудия, из-за утечки масла из гидравлического распределителя. Недостатком данного метода является отсутствие контроля положения орудия в пространстве, тем самым снижается уровень автоматизации интеллектуальной системы управления [3].
Раскрытие изобретения
Техническим результатом является повышение эффективности эксплуатации машинно-тракторного агрегата за счет повышения точности обработки агроландшафта и автоматизации МТА.
Технический результат достигается способом автоматического управления навесным устройством на машинно-тракторном агрегате, причем перед началом работ создают цифровую карту поля при помощи спутника либо при помощи объезда поля с установленным на машине GPS-приемником отслеживания положения МТА на агроландшафте, затем на цифровой карте отмечают границы разворотных полос и проводят вспомогательные линии внутри разворотных полос на расстоянии, равном расстоянию от GPS-приемника до плуга, полученную цифровую карту загружают в бортовой компьютер машины, положение машинно-тракторного агрегата на агроландшафте определяют при помощи GPS-приемника, установленного на капоте машины, а положение плуга определяют при помощи датчиков угла в шарнирах крепления, при пересечении вспомогательных линий или границ разворотных полос, бортовой компьютер в зависимости от положения навесного устройства посылает управляющий сигнал на электромагниты гидрораспределителя гидравлической системы управления навесным устройством и опускает или поднимает гидроцилиндр на заданную высоту, скорость движения плуга регулируют степенью открытия клапана и рассчитывают по формуле:
где  – скорость машинно-тракторного агрегата;
– скорость машинно-тракторного агрегата;
H – высота подъема плуга над уровнем агроландшафта;
h – глубина вспашки;
Is – передаточное число навесного устройства;
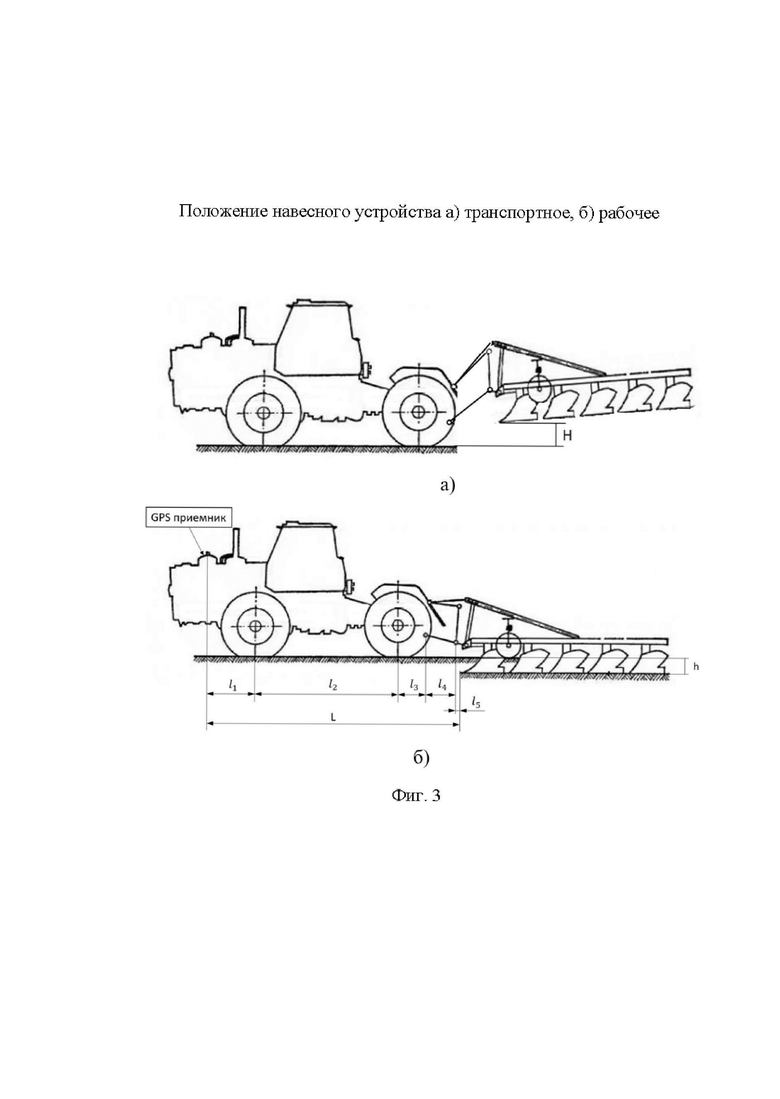
L – расстояние от GPS-приемника до плуга, численно равное расстоянию от вспомогательной линии до границы разворотной полосы, которое рассчитывается по формуле: L=l1+l2+l3+l4+l5,
где l1 – расстояние от GPS-приемника до оси переднего колеса;
l2 – колесная база машинно-тракторного агрегата;
l3 – расстояние от оси заднего колеса до крепления навесного устройства;
l4 – длина навесного устройства;
l5 – расстояние от крепления плуга до носка первого корпуса.
Машина должна двигаться на агроландшафте в двух режимах: транспортном и тяговом, и для каждого режима характерно свое положение рабочего органа, для повышения точности обработки агроландшафта необходимо своевременно перемещать орудие в соответствующее положение. При движении на разворотной полосе орудие должно быть поднято, а при движении по агроландшафту – орудие должно находиться в рабочем положении. Границы перехода из одного режима в другой четко определены и зависят от геометрии агроландшафта.
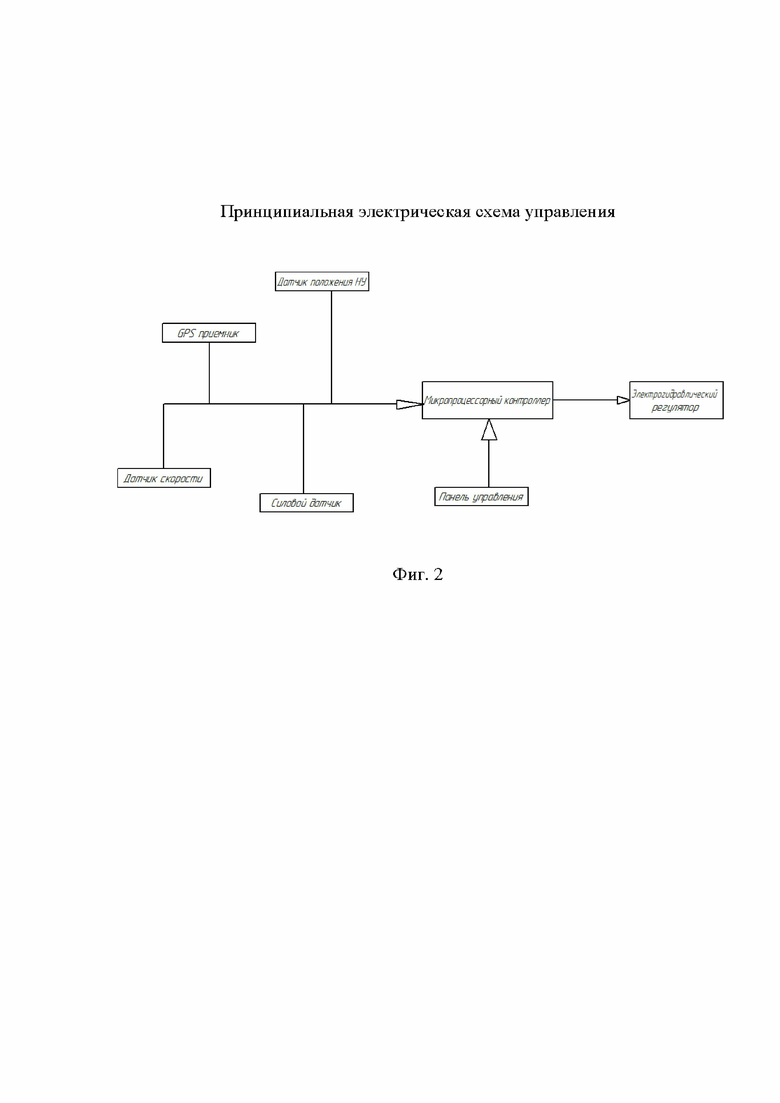
Технический результат достигается путем применения электронного блока управления, который считывает положение трактора и положение орудия на машине, и спутниковой системой связи. Составляется цифровая карта поля, на которой отмечается граница разворотных полос. Полученная карта загружается в электронный блок управления. При работе GPS приемник передает данные на бортовой компьютер информацию о местонахождении МТА на агроландшафте, датчики, установленные в шарнирах навесного устройства, передают данные о положении орудия. Далее рассчитывается скорость, с которой необходимо поднять или опустить орудие, и золотник гидрораспределителя перемещается на необходимую величину, сообщая гидроцилиндр с насосом и сливным баком.
Краткое описание изобретения
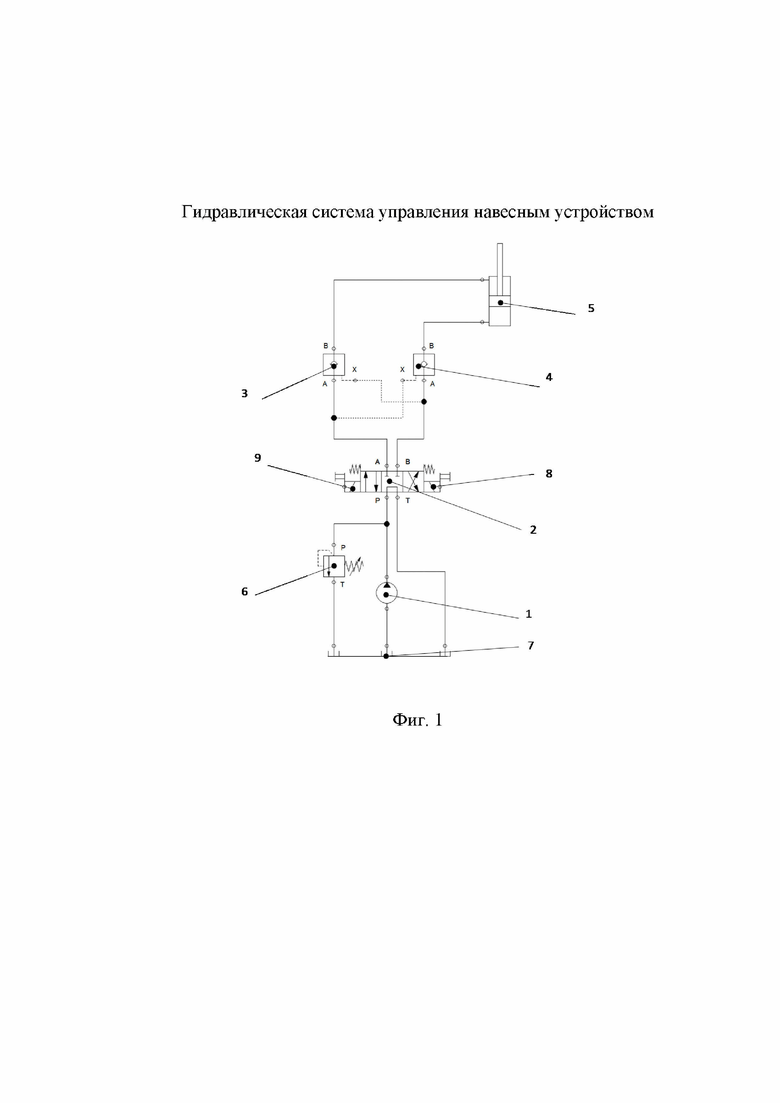
В предлагаемом изобретении применяется гидравлическая система управления навесным устройством, фиг. 1. Данное устройство оснащено нерегулируемым насосом 1, электромагнитным гидрораспределителем 2, двумя гидрозамками 3, 4 и гидроцилиндром 5, сливным клапаном 6 и сливным баком 7.
На фиг. 2 изображена принципиальная электрическая схема управления.
Реализация способа
Предварительно перед началом работ создают цифровую карту поля при помощи спутника либо при помощи объезда поля с установленным на машине GPS-приемником отслеживания положения МТА на агроландшафте. На цифровой карте отмечают границы разворотных полос и проводят вспомогательные линии внутри разворотных полос на расстоянии, равном расстоянию от GPS-приемника до плуга. Полученную цифровую карту загружают в бортовой компьютер машины.
Положение машинно-тракторного агрегата на агроландшафте определяют при помощи GPS-приемника, установленного на капоте машины, а положение плуга определяют при помощи датчиков угла в шарнирах крепления. Датчики угла, установленные в шарнирах крепления, определяют высоту, на которую поднято орудие над опорной поверхностью.
Когда МТА начинает выезжать с разворотной полосы, GPS-приемник регистрирует пересечение вспомогательных линий или границ разворотных полос, бортовой компьютер рассчитывает скорость опускания плуга, с тем условием, чтобы оно находилось на нужной высоте в момент пересечения границы разворотной полосы. После выполнения расчетов, контроллер подает посылает управляющий сигнал на электромагниты гидрораспределителя 2 гидравлической системы, который сообщает гидроцилиндр 5 с насосом 1 и гидравлическим баком 7. Степень открытия клапана определяет скорость движения штока и рассчитывается по формуле:
A=Qvп,
где Q – объемный расход рабочей жидкости, поступающий в магистраль от насоса,
v п – скорость перемещения поршня ГЦ.
Скорость перемещения поршня ГЦ зависит от скорости движения МТА, габаритов МТА и высоте подъема плуга. На фиг. 3 а) изображено транспортное положение навесного устройства, а на фиг. 3 б) - рабочее положение.
Таким образом, расчетная скорость опускания плуга определяется по формуле:
где vтр – скорость МТА,
H – высота подъема плуга над уровнем агроландшафта,
h – глубина вспашки,
Is – передаточное число навесного устройства [4],
L – расстояние от GPS приемника до плуга, численно равное расстоянию от вспомогательной линии до границы разворотной полосы, которое рассчитывается по формуле: L=l1+l2+l3+l4+l5,
где l1 – расстояние от GPS приемника до оси переднего колеса,
l2 – колесная база МТА,
l3 – расстояние от оси заднего колеса до крепления навесного устройства,
l4 – длина навесного устройства,
l5 – расстояние от крепления плуга до носка первого корпуса.
Электромагнит 9 перемещает золотник вправо, сообщая насос со штоковой полостью ГЦ. Орудие опускается под действием возрастающего гидравлического давления на поршень гидроцилиндра и за счет собственного веса. Жидкость перетекает из подпоршневой полости ГЦ через гидрозамок 4, который открывается, так как соединен с линией подачи, позволяя жидкости сливаться в гидравлический бак 7. После того как орудие опустится на заданную высоту, электромагнит 9 отключается и золотник возвращается в нейтральное положение за счет возвратной пружины. Жидкость в напорной линии запирается и не дает штоку подниматься, а также не пропускает жидкость в сливной бак, таким образом фиксируя навесное устройство в заданном положении. В нейтральном положении жидкость перекачивается насосом в гидравлический бак через перепускной клапан 6. Золотник удерживается в нейтральном положении за счет возвратных пружин.
При въезде на разворотную полосу, система действует аналогично. На бортовой компьютер поступает сигнал о том, что GPS-приемник пересекает границу разворотной полосы, срабатывает датчик, подающий сигнал на электромагнит 8, который перемещает золотник влево, сообщая подпоршневую полость с насосом 1, а штоковую – с баком 7. Таким образом, происходит подъем орудия. При достижении высоты, не менее клиренса МТА, электромагнит 8 на гидрораспределителе выключается и золотник под действием возвратной пружины занимает нейтральное положение, разрывая связь гидроцилиндра с насосом и баком, тем самым фиксируя положение орудия.
Данный способ управления навесным устройством позволяет повысить уровень автоматизации МТА при совершении маневров на разворотных полосах, а также повысить эффективность работы машины, за счет точного контроля обработанного участка агроландшафта.
Пример реализации
Исследования проводились в поселке Опытный на сельских угодьях в Чувашской Республике. Анализировалась длина гона и величина обработанной части разворотной полосы. В качестве технического средства был использован МТА Уралец для вспашки поля и квадрокоптер Phantom 4 RTK для создания цифровой карты поля. МТА оснащен GPS-приемником на капоте, датчиками угла разворота навесного устройства, бортовым компьютером и плугом.
Перед заездом трактора на поле, квадрокоптер с камерой облетает поле и создает точный его снимок, на котором отмечены границы агроландшафта. При помощи программы MapInfo отмечаются границы разворотных полос и проводятся вспомогательные линии, необходимые для управления навесным устройством. Полученная цифровая карта загружается на бортовой компьютер МТА.
При заезде МТА на поле GPS-приемник фиксирует пересечение границы разворотной полосы. Подается сигнал с бортового компьютера на опускание плуга. Несмотря на то, что заглубление плуга в почву происходит на разворотной полосе, на заданную глубину он опустится около границы гона. При въезде на разворотную полосу GPS-приемник фиксировал пересечение вспомогательной линии, отмеченной на цифровой карте, и поднимал орудие на заданную высоту. Начало выглубления орудия начиналось в момент его пересечения границы разворотной полосы.
Источник информации
1. Патент РФ № 4910188/15, 12.02.1991. Строк Евгений Яковлевич, Бельчик Леонид Демьянович. Электрогидравлическая система управления навесными орудиями
2. Патент РФ № 2017112154, 10.04.2017. Арбузов Виталий Иванович, Строк Евгений Яковлевич, Бельчик Леонид Демьянович, Бацунов Алексей Сергеевич, Дубковский Владимир Евгеньевич. Электрогидравлический регулятор навесного устройства сельскохозяйственной машины.
3. European patent CN 202011003075, 22.09.2020. WANG, Lifeng, Weifang, Shandong 261061, WU Beibei Weifang, Shandong 261061, LI, Wuhai Weifang, Shandong 261061.
4. Попов, В.Б. Математическое моделирование подъемно-навесных устройств мобильных энергетических средств – Гомель ГГТУ им. П. О. Сухого 2016.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УЛУЧШЕНИЯ ТЯГОВО-СЦЕПНЫХ ПОКАЗАТЕЛЕЙ МАШИННО-ТРАКТОРНОГО АГРЕГАТА С НАВЕСНЫМ ПОЧВООБРАБАТЫВАЮЩИМ ОРУДИЕМ | 2011 |
|
RU2485743C1 |
| НАВЕСНОЕ УСТРОЙСТВО ТРАКТОРА | 2015 |
|
RU2611837C1 |
| СПОСОБ ДИФФЕРЕНЦИРОВАННОГО ВНЕСЕНИЯ МИНЕРАЛЬНЫХ УДОБРЕНИЙ ПРИ УБОРКЕ ЗЕРНОВЫХ КУЛЬТУР | 2011 |
|
RU2477597C2 |
| ОРУДИЕ ПОЧВООБРАБАТЫВАЮЩЕЕ | 2019 |
|
RU2707809C1 |
| Способ контурного глубокого рыхления с вертикальным мульчированием почвы склоновых земель | 2022 |
|
RU2786696C1 |
| Машина для дифференцированного внесения пестицидов, жидких минеральных удобрений и других агрохимикатов | 2020 |
|
RU2748996C1 |
| Дополнительная опорная ось | 2015 |
|
RU2618612C1 |
| ТРАКТОР ТОЧНОГО ХОДА И СПОСОБ АВТОПИЛОТИРОВАНИЯ МАШИННО-ТРАКТОРНОГО АГРЕГАТА ПО МЕСТНЫМ ОРИЕНТИРАМ | 2013 |
|
RU2550915C1 |
| Способ контроля качества обработки почвы на агроландшафтах в полевых условиях | 2020 |
|
RU2741746C1 |
| Мобильный робот-опрыскиватель для обработки пестицидами пропашных овощных и низкорастущих ягодных культур | 2019 |
|
RU2731082C1 |
Изобретение относится к сельскому хозяйству. Способ автоматического управления навесным устройством на машинно-тракторном агрегате предусматривает перед началом работ создание цифровой карты поля при помощи спутника либо при помощи объезда поля с установленным на машине GPS-приемником отслеживания положения МТА на агроландшафте. Затем на цифровой карте отмечают границы разворотных полос и проводят вспомогательные линии внутри разворотных полос на расстоянии, равном расстоянию от GPS-приемника до плуга. Далее полученную цифровую карту загружают в бортовой компьютер машины. Положение машинно-тракторного агрегата на агроландшафте определяют при помощи GPS-приемника, установленного на капоте машины, а положение плуга определяют при помощи датчиков угла в шарнирах крепления. При пересечении вспомогательных линий или границ разворотных полос бортовой компьютер в зависимости от положения навесного устройства посылает управляющий сигнал на электромагниты гидрораспределителя гидравлической системы управления навесным устройством и опускает или поднимает гидроцилиндр на заданную высоту. Скорость движения плуга регулируют степенью открытия клапана и рассчитывают по формуле:  где
где  – скорость машинно-тракторного агрегата; H – высота подъема плуга над уровнем агроландшафта; h – глубина вспашки; Is – передаточное число навесного устройства; L – расстояние от GPS-приемника до плуга, численно равное расстоянию от вспомогательной линии до границы разворотной полосы, которое рассчитывается по формуле: L=l1+l2+l3+l4+l5, где l1 – расстояние от GPS-приемника до оси переднего колеса; l2 – колесная база машинно-тракторного агрегата; l3 – расстояние от оси заднего колеса до крепления навесного устройства; l4 – длина навесного устройства; l5 – расстояние от крепления плуга до носка первого корпуса. Обеспечивается повышение эффективности эксплуатации машинно-тракторного агрегата за счет повышения точности обработки агроландшафта и автоматизации МТА. 3 ил.
– скорость машинно-тракторного агрегата; H – высота подъема плуга над уровнем агроландшафта; h – глубина вспашки; Is – передаточное число навесного устройства; L – расстояние от GPS-приемника до плуга, численно равное расстоянию от вспомогательной линии до границы разворотной полосы, которое рассчитывается по формуле: L=l1+l2+l3+l4+l5, где l1 – расстояние от GPS-приемника до оси переднего колеса; l2 – колесная база машинно-тракторного агрегата; l3 – расстояние от оси заднего колеса до крепления навесного устройства; l4 – длина навесного устройства; l5 – расстояние от крепления плуга до носка первого корпуса. Обеспечивается повышение эффективности эксплуатации машинно-тракторного агрегата за счет повышения точности обработки агроландшафта и автоматизации МТА. 3 ил.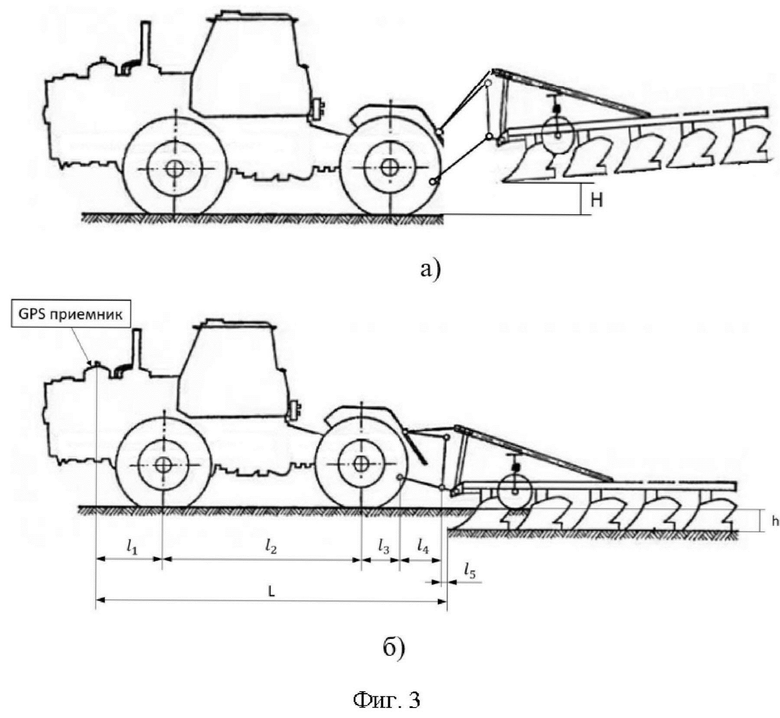
Способ автоматического управления навесным устройством на машинно-тракторном агрегате, характеризующийся тем, что перед началом работ создают цифровую карту поля при помощи спутника либо при помощи объезда поля с установленным на машине GPS-приемником отслеживания положения МТА на агроландшафте, затем на цифровой карте отмечают границы разворотных полос и проводят вспомогательные линии внутри разворотных полос на расстоянии, равном расстоянию от GPS-приемника до плуга, полученную цифровую карту загружают в бортовой компьютер машины, положение машинно-тракторного агрегата на агроландшафте определяют при помощи GPS-приемника, установленного на капоте машины, а положение плуга определяют при помощи датчиков угла в шарнирах крепления, при пересечении вспомогательных линий или границ разворотных полос, бортовой компьютер в зависимости от положения навесного устройства посылает управляющий сигнал на электромагниты гидрораспределителя гидравлической системы управления навесным устройством и опускает или поднимает гидроцилиндр на заданную высоту, скорость движения плуга регулируют степенью открытия клапана и рассчитывают по формуле:
где  – скорость машинно-тракторного агрегата;
– скорость машинно-тракторного агрегата;
H – высота подъема плуга над уровнем агроландшафта;
h – глубина вспашки;
Is – передаточное число навесного устройства;
L – расстояние от GPS-приемника до плуга, численно равное расстоянию от вспомогательной линии до границы разворотной полосы, которое рассчитывается по формуле:
L=l1+l2+l3+l4+l5,
где l1 – расстояние от GPS-приемника до оси переднего колеса;
l2 – колесная база машинно-тракторного агрегата;
l3 – расстояние от оси заднего колеса до крепления навесного устройства;
l4 – длина навесного устройства;
l5 – расстояние от крепления плуга до носка первого корпуса.
| WO 2023012811 A1, 09.02.2023 | |||
| EP 3420789 A1, 02.01.2019 | |||
| ПЛУЖНАЯ СИСТЕМА | 2016 |
|
RU2713336C2 |
| EP 4219957 A1, 02.08.2023 | |||
| Попов В.Б | |||
| Математическое моделирование подъемно-навесных устройств мобильных энергетических средств / В.Б | |||
| Попов | |||
| - Гомель: ГГТУ им | |||
| П.О | |||
| Сухого, 2016 | |||
| Способ модулирования для радиотелефона | 1921 |
|
SU251A1 |
| Устройство для избирательного управления двумя реле | 1918 |
|
SU978A1 |

