Настоящее изобретение относится к плунжерному устройству для устройства введения для размещения вещества, материала или объекта и к соответствующим способам. Настоящее изобретение относится, в частности, но не исключительно, к плунжерному устройству для устройства для имплантации интраокулярной линзы (ИОЛ) в глаз субъекта и к соответствующим способам изготовления и применения такого устройства.
Существует много медицинских и немедицинских процедур, в которых практикующему врачу или другому оперирующему врачу(оператору) требуется точно и управляемо дозировать вязкое вещество (материал) или размещать небольшой объект (часто удерживаемый в вязкой среде). Такие процедуры обычно требуют, чтобы высококвалифицированный оперирующий врач прикладывал относительно большое усилие, часто систематически, с обеспечением при этом высокого уровня точности.
Одно подобное применение состоит в имплантации интраокулярной линзы (ИОЛ) в глаз пациента в рамках процедуры лечения таких патологий, как катаракты или миопия.
Для поддержки таких процедур разработаны инжекторы или устройства имплантации ИОЛ, которые позволяют хирургу имплантировать ИОЛ в глаз пациента через разрез, который значительно уже ширины линзы. Данные устройства обычно складывают линзу до меньшего размера посредством ее продвижения с помощью плунжера через узкое сопло. По клиническим причинам вязкое средство, известное как вязкоупругое или «офтальмологическое вискохирургическое изделие» («ОВИ»), добавляют по мере того, как линзу вдвигают в сопло.
Трение между линзой и соплом инжектора ИОЛ может быть высоким, и поэтому, в зависимости от размера и типа линзы, ответственному практикующему врачу, возможно, потребуется двигать вводный плунжер соответствующим большим усилием. Введение должно выполняться с точным управлением, чтобы исключить быстрое высвобождение запасенной энергии в момент, когда линза выходит из сопла и входит в глаз.
Существующие устройства обычно выпускаются в форме подобных шприцам устройств введения с ручным приводом. Однако управление данными устройствами может быть затруднительным для оперирующего врача, особенно когда ИОЛ выходит из инжектора, вследствие резкого ослабления усилия, необходимого для введения, с относительно высокого уровня, необходимого для проталкивания линзы через сопло, до почти нулевого сразу после того, как линза миновала сопло. Из-за того, что усилие падает резко, существует опасность, что оперирующий врач может потерять управление устройством, и что, в результате, сопло, которое держится в небольшом разрезе в глазу, причинит травму глазу.
Хотя в устройствах введения ИОЛ с ручным управлением и винтовой подачей можно оптимизировать риск, связанный со ступенчатым изменением прикладываемого усилия, данные устройства обычно вводят линзы сравнительно медленно. Более того, вращательные движения, выполняемые оперирующим врачом для управления устройством с винтовой подачей или подобным устройством, могут вызывать нежелательное движение сопла, с соответствующим риском того, что ткань глаза может быть поранена вблизи разреза.
Устройства с ручным управлением и винтовой подачей, в общем, также требуют управления двумя руками. Однако хирурги предпочитают иметь одну руку свободной, чтобы помогать удерживать в неподвижности глаз пациент во время имплантации линзы и направлять выходящую линзу в заданное место. Ранее были рассмотрены и предложены на рынке механизмы введения разных типов с электроприводом, гидравлическим приводом, приводом сжатым газом и пружинным приводом. Хотя данные механизмы имеют преимущество в том, что они могут освобождать руку хирурга для содействия процедуре введения, существующие устройства обычно являются тяжелыми, плохо сбалансированными, сложными механически и дорогими.
Следует понимать, что аналогичные проблемы могут возникать с любым подобным устройством введения для других областей применения, в которых исполнителю требуется точно и управляемо дозировать вязкое вещество, материал или размещать устройство, удерживаемое в вязкой среде. Даже если необходимые усилие или точность не особенно значительны, существует риск травмы, возникающей из-за повторяющейся нагрузки в ходе любой подобной процедуры, когда оперирующему врачу требуется изо дня в день использовать такое устройство введения.
Целью изобретения является создание усовершенствованного плунжерного устройства и соответствующего способа, например, плунжерного устройства для устройства введения, которое устраняет или по меньшей мере частично сглаживает одну или более из вышеупомянутых проблем, и одного или более соответствующих способов изготовления или применения такого плунжерного устройства.
Аспекты изобретения сформулированы в прилагаемых независимых пунктах формулы изобретения. Другие дополнительные признаки изложены в зависимых пунктах формулы изобретения.
В соответствии с одним примером предлагается плунжерное устройство для устройства введения, при этом плунжерное устройство содержит: корпус; плунжер, выполненный с возможностью перемещения в аксиальном направлении относительно корпуса для вытеснения по меньшей мере одного объекта и/или материала из сопла устройства введения; источник запасенной механической энергии для обеспечения движущего усилия для перемещения плунжера в аксиальном направлении относительно корпуса; вращающийся элемент, удерживаемый в корпусе и выполненный с возможностью вращения относительно корпуса, причем вращение вращающегося элемента обеспечивает управляемое высвобождением (выход) плунжера для перемещения плунжера в аксиальном направлении относительно корпуса под действием усилия, обеспечиваемого источником запасенной механической энергии; и привод для приведения в действие оперирующим врачом (оператором), использующим плунжерное устройство, чтобы вызывать вращение вращающегося элемента относительно корпуса для обеспечения управляемого высвобождения плунжера для аксиального перемещения плунжера под действием усилия, обеспечиваемого источником запасенной механической энергии.
Вращение вращающегося элемента может, например, происходить вокруг оси вращения, которая параллельна аксиальному направлению. Плунжерное устройство может быть выполнено с возможностью перемещения плунжера в аксиальном направлении относительно корпуса для продольного смещения, которое зависит от суммарного угла вращения, когда происходит вращение вращающегося элемента на заданный суммарный угол вращения.
Плунжер и корпус могут быть соответственно выполнены с возможностью аксиального перемещения друг относительно друга, при котором вращение плунжера относительно корпуса, когда плунжер перемещается в аксиальном направлении, блокируется.
Плунжер и вращающийся элемент могут иметь каждый соответствующую резьбовую поверхность. Когда плунжер и вращающийся элемент имеют каждый соответствующую резьбовую поверхность, резьбовые поверхности плунжера и вращающегося элемента могут быть, при необходимости, выполнены с возможностью взаимного зацепления, при этом вращающийся элемент может быть выполнен с возможностью вращения относительно плунжера, когда вращающийся элемент вращается относительно корпуса для обеспечения управляемого высвобождения (выхода) плунжера.
Когда плунжер и вращающийся элемент имеют каждый соответствующую резьбовую поверхность, резьбовые поверхности плунжера и вращающегося элемента могут быть выполнены так, что вращающийся элемент является самотормозящимся относительно плунжера. Резьбовые поверхности плунжера и вращающегося элемента могут быть выполнены с возможностью блокирования аксиального перемещения плунжера, относительно корпуса, когда вращающийся элемент не вращается.
Вращающийся элемент и плунжер могут быть соответственно выполнены с возможностью аксиального перемещения друг относительно друга, при котором вращение вращающегося элемента относительно плунжера, когда плунжер перемещается в аксиальном направлении, блокируется.
Плунжер и корпус могут иметь каждый соответствующую резьбовую поверхность. Когда плунжер и корпус имеют каждый соответствующую резьбовую поверхность, резьбовые поверхности плунжера и корпуса могут быть, при необходимости, выполнены с возможностью взаимного зацепления, вследствие чего плунжер выполнен с возможностью вращения относительно корпуса, когда вращающийся элемент вращается относительно корпуса, чтобы обеспечивать управляемый выход плунжера.
Вращающийся элемент и корпус могут быть соответственно выполнены с возможностью вращательного движения друг относительно друга, при котором аксиальное перемещение вращающегося элемента относительно корпуса блокируется.
Источник запасенной механической энергии может содержать пружину, которая располагается для хранения упругой потенциальной энергии до приведения в действие плунжерного устройства для обеспечения движущего усилия для перемещения плунжера. Пружина может быть расположена так, чтобы находиться в сжатом состоянии для хранения упругой потенциальной энергии до приведения в действие плунжерного устройства для обеспечения движущего усилия для перемещения плунжера. В качестве альтернативы, пружина может быть расположена так, чтобы находиться в напряженном состоянии для хранения упругой потенциальной энергии до приведения в действие плунжерного устройства для обеспечения движущего усилия для перемещения плунжера.
Источник запасенной механической энергии может содержать пневматический привод для обеспечения пневматического усилия в качестве движущего усилия для перемещения плунжера.
Привод может быть выполнен с возможностью аксиального перемещения оперирующим врачом относительно корпуса, при этом аксиальное перемещение привода может вызывать вращение вращающегося элемента относительно корпуса для обеспечения управляемого выхода плунжера. Привод и корпус могут быть соответственно выполнены с возможностью аксиального перемещения друг относительно друга, при котором вращение привода относительно корпуса, когда привод перемещают в аксиальном направлении, может блокироваться.
Привод и вращающийся элемент могут иметь каждый соответствующую резьбовую поверхность. Когда привод и вращающийся элемент имеют каждый соответствующую резьбовую поверхность, резьбовые поверхности привода и вращающегося элемента могут быть, при необходимости, выполнены с возможностью взаимного зацепления, при этом вращающийся элемент выполнен с возможностью вращения относительно привода, когда привод перемещают в аксиальном направлении, чтобы тем самым обеспечить управляемое высвобождение плунжера. Резьбовые поверхности привода и вращающегося элемента могут быть выполнены так, что вращающийся элемент является самотормозящимся относительно привода.
Вращающийся элемент и привод могут быть соответственно выполнены с возможностью аксиального перемещения друг относительно друга, при котором вращение вращающегося элемента относительно привода, когда привод перемещают в аксиальном направлении, может блокироваться.
Привод и корпус могут иметь каждый соответствующую резьбовую поверхность. Когда привод и корпус имеют каждый соответствующую резьбовую поверхность, резьбовые поверхности привода и корпуса могут быть, при необходимости, выполнены с возможностью взаимного зацепления, вследствие чего привод выполнен с возможностью вращения относительно корпуса, чтобы вращать вращающийся элемент относительно корпуса для обеспечения тем самым управляемого высвобождения плунжера.
Привод может быть оборудован электромеханическим механизмом для приведения во вращение вращающегося элемента относительно корпуса и, при необходимости, переключателем для приведения в действие электромеханического механизма оперирующим врачом, чтобы управлять работой вращающегося элемента для обеспечения тем самым управляемого выхода плунжера.
Плунжерное устройство может также содержать по меньшей мере один дополнительный источник механической энергии для обеспечения движущего усилия для вращения вращающегося элемента. Например, по меньшей мере один дополнительный источник механической энергии может содержать пружину, такую как торсионная пружина, или что-то подобное, и/или может содержать электроприводной источник механической энергии.
Плунжерное устройство может также содержать по меньшей мере один элемент для обеспечения предварительно настроенного сопротивления между приводом и корпусом для сопротивления аксиальному перемещению привода относительно корпуса, вследствие чего привод может перемещаться оперирующим врачом, например, посредством приложения по существу равномерного усилия, которого достаточно для преодоления предварительно настроенного сопротивления.
Корпус, плунжер, вращающийся элемент и привод могут быть соответственно выполнены с возможностью приведения в действие привода оперирующим врачом, прикладывающим по существу равномерное усилие для перемещения привода в аксиальном направлении, чтобы тем самым вращать вращающийся элемент относительно корпуса для обеспечения управляемого выхода плунжера; из первого положения относительно корпуса, в котором плунжерное устройство подготовлено к использованию; во второе положение относительно корпуса, в котором плунжерное устройство выполнено с возможностью вытеснения по меньшей мере одного объекта и/или материала из сопла устройства введения во время работы.
В соответствии с одним примером предлагается устройство введения для вытеснения по меньшей мере одного объекта и/или материала, при этом устройство введения содержит сопло для вытеснения по меньшей мере одного объекта и/или материала и плунжерное устройство по любому предыдущему пункту.
Устройство введения может быть выполнено с возможностью вытеснения интраокулярной линзы в глаз пациента.
В соответствии с одним примером предлагается способ вытеснения по меньшей мере одного объекта и/или материала, при этом способ содержит следующие этапы: обеспечивают вышеупомянутое устройство введения, при этом устройство введения содержит по меньшей мере один объект и/или материал, подлежащий вытеснению; и приводят в действие привод плунжерного устройства в устройстве введения, чтобы вызвать вращение вращающегося элемента относительно корпуса для обеспечения управляемого высвобождения плунжера для аксиального перемещения плунжера под действием усилия, обеспечиваемого источником запасенной механической энергии, чтобы тем самым вытеснить по меньшей мере один объект и/или материал.
В соответствии с одним примером предлагается способ изготовления вышеупомянутого плунжерного устройства, при этом способ содержит следующие этапы: обеспечивают корпус, плунжер, источник запасенной механической энергии, вращающийся элемент и привод плунжерного устройства; и собирают корпус, плунжер, источник запасенной механической энергии, вращающийся элемент и привод, чтобы сформировать плунжерное устройство.
Далее, в качестве примера, приведено описание вариантов осуществления изобретения со ссылкой на прилагаемые чертежи, на которых:
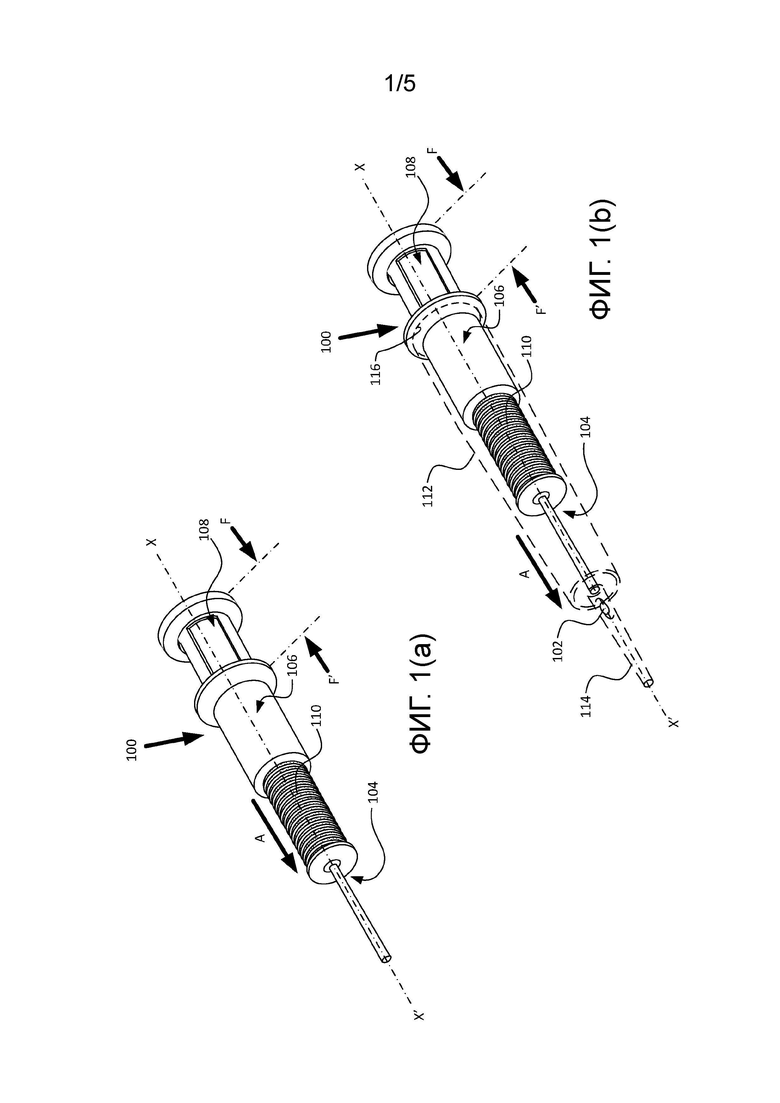
Фигура 1(a) - схематичное трехмерное изображение примерного плунжерного устройства для устройства введения;
Фигура 1(b) - схематичное трехмерное изображение примерного плунжерного устройства, показанного на фигуре 1(a), при использовании в составе устройства введения интраокулярной линзы (ИОЛ);
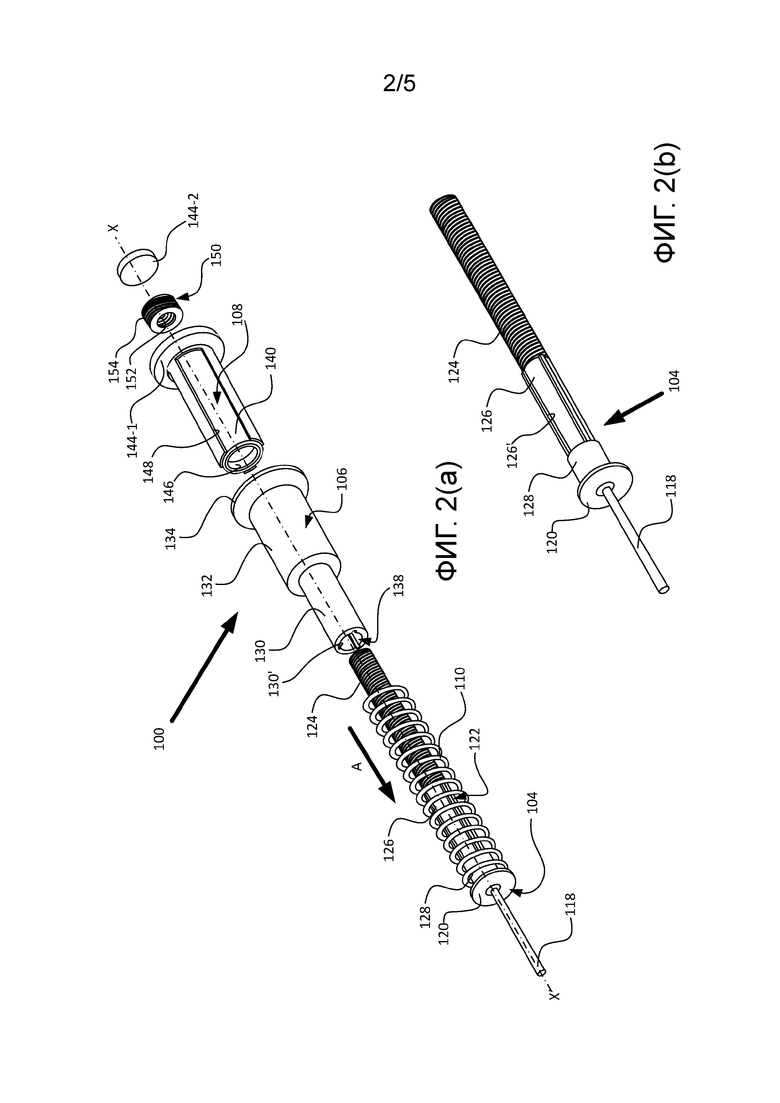
Фигура 2(a) - схематичное трехмерное изображение с пространственным разделением деталей примерного плунжерного устройства, показанного на фигуре 1(a);
Фигура 2(b) - схематичное трехмерное изображение части примерного плунжерного устройства, показанного на фигуре 1(a);
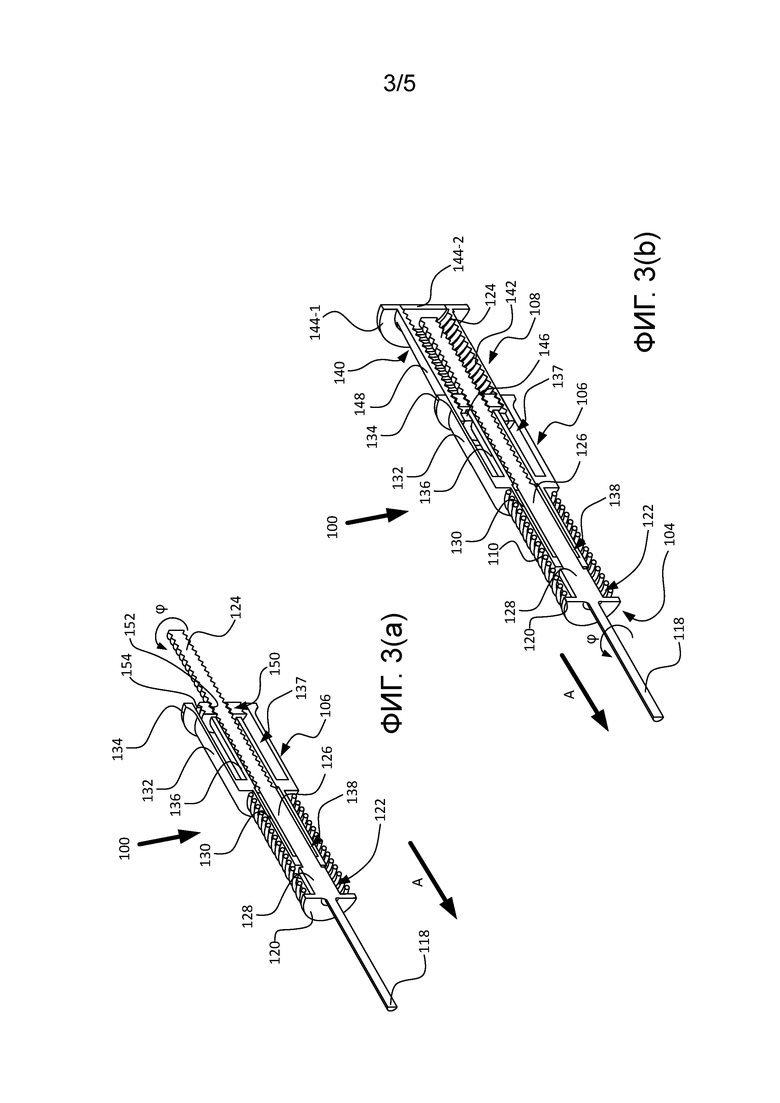
Фигура 3(a) - схематичное трехмерное изображение в разрезе части примерного плунжерного устройства, показанного на фигуре 1(а);
Фигура 3(b) - другое схематичное трехмерное изображение в разрезе примерного плунжерного устройства, показанного на фигуре 1(а);
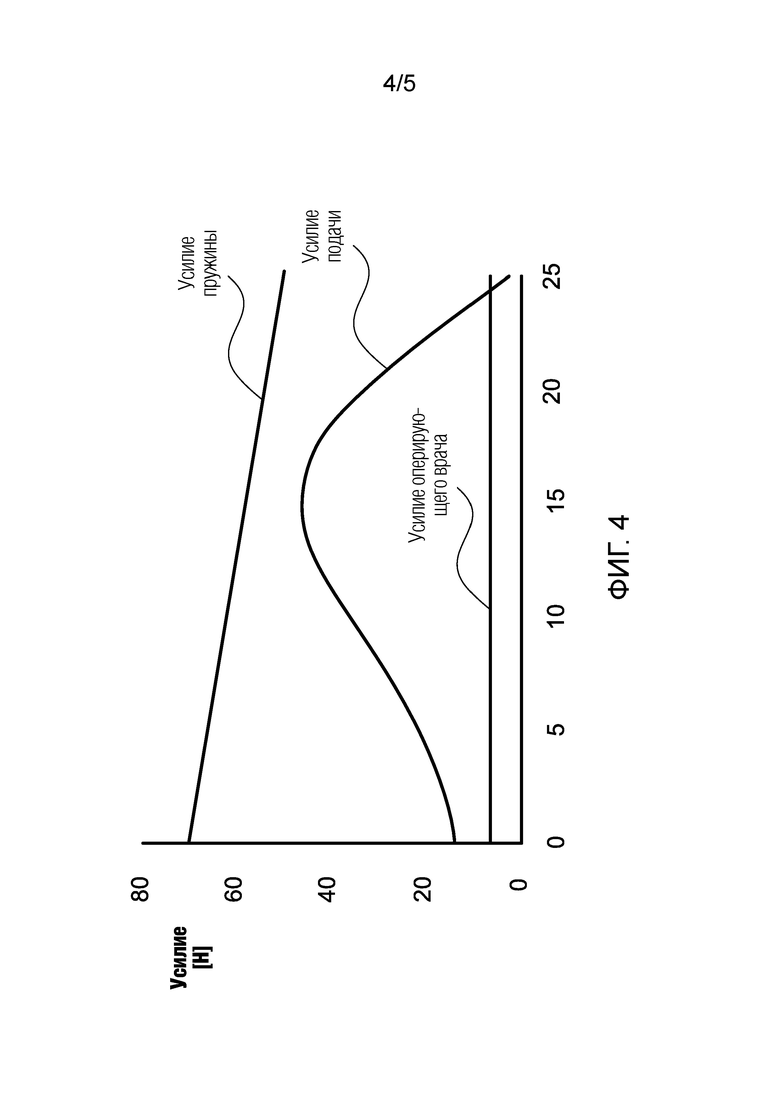
Фигура 4 - график, концептуально представляющий усилия, действующие на различные части примерного плунжерного устройства, показанного на фигуре 1(a) во время работы; и
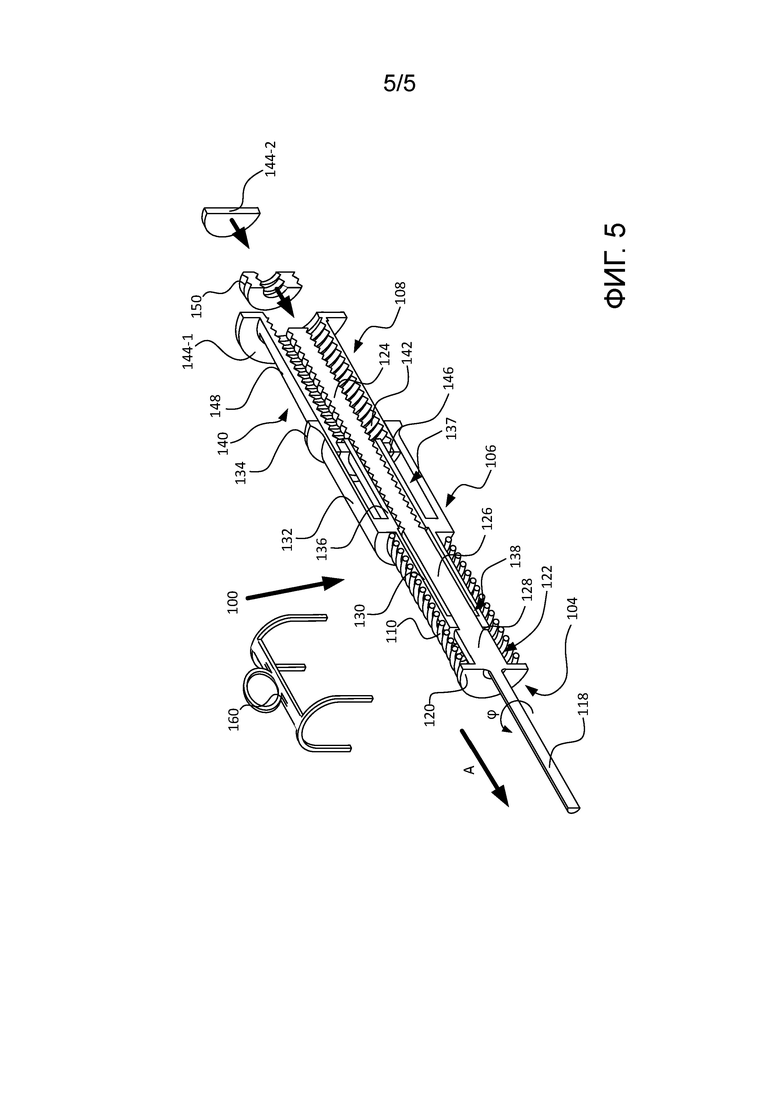
Фигура 5 - схематичное трехмерное изображение в разрезе и с частичным пространственным разделением деталей примерного плунжерного устройства, показанного на фигуре 1(a) во время сборки.
Общее представление
На фигурах 1(a) и 1(b) представлено плунжерное устройство для устройства введения, обозначенное общей позицией 100. Фигура 1(a) является схематичным трехмерным изображением примерного плунжерного устройства для устройства введения. Фигура 1(b) является схематичным трехмерным изображением плунжерного устройства 100, показанного на фигуре 1(a), примененного в составе устройства введения для имплантации интраокулярной линзы (ИОЛ) 102.
Как видно на фигуре 1(a), плунжерное устройство 100 имеет сходство с медицинским шприцом или чем-то подобным и содержит плунжер 104, корпус 106, привод 108 и пружину 110, которые располагаются соосно относительно их продольных осей (т.е. относительно оси Х-Х' на фигурах 1(a) и 1(b)). Корпус 106 выполнен с возможностью подвижного вмещения части плунжера 104 в один конец корпуса 106 и части привода 108 в другой конец корпуса 106. Пружина 110 содержит пружину сжатия, которая, когда плунжерное устройство 100 полностью собрано и готово к использованию, находится в предварительно сжатом состоянии. Пружина 110 расположена с возможностью обеспечения приводного усилия для приведения в движение плунжера 104 в направлении стрелки А, от привода 108 и корпуса 106.
Как видно на фигуре 1(b), устройство введения ИОЛ содержит удлиненную защитную трубчатую гильзу 112, в общем, круглого поперечного сечения. Гильза 112 формирует внутреннюю камеру, в которой ИОЛ 102 (вместе с любым вязкоупругим средством/офтальмологическим вискохирургическим изделием (ОВИ)) помещается для введения. Гильза 112 имеет сопло 114, обеспеченное продольно на одном конце внутренней камеры (соосно с осью Х-Х'), через которое ИОЛ 102, расположенная в камере, может продвигаться плунжером 104 во время работы. На конце внутренней камеры, продольно противоположном соплу 114, обеспечено отверстие 116, чтобы вмещать плунжерное устройство 100 для сборки с целью формирования устройства введения ИОЛ. Следует понимать, что изображение устройства введения ИОЛ предусмотрено для демонстрации возможного способа применения плунжерного устройства 100 и является упрощенным для ясности.
Плунжерное устройство 100 располагается так, что во время работы пользователь плунжерного устройства 100 может приводить устройство в действие посредством приложения относительно небольшого и по существу постоянного усилия между приводом 108 и корпусом 106 (как указано стрелками F-F'), чтобы сдвинуть привод в направлении стрелки А. Например, пользователь может манипулировать устройством одной рукой посредством нажима на привод 108 большим пальцем, удерживая при этом корпус 106 в положении между двумя пальцами подобно шприцу.
Внутренние элементы плунжерного устройства 100 выполнены с возможностью полезного разделения усилия, необходимого для перемещения плунжера 104 («усилие на плунжере») с усилием, которое следует прикладывать к приводу 108 («усилие срабатывания») относительно корпуса 106, чтобы приводить в действие устройство. Конкретнее, как подробно описано далее по тексту, внутренние элементы плунжерного устройства 100 выполнены так, что, когда к приводу прикладывается относительно небольшое и постоянное усилие, перемещение привода по мере того, как он вдвигается в корпус 106, вызывает соответствующее перемещение плунжера 104. Элементы плунжерного устройства 100 предпочтительно выполнены так, что плунжер 104 приводится в движение в направлении А полностью (или по меньшей мере, главным образом) усилием пружины, прилагаемым предварительно сжатой пружиной 110.
Внутренние элементы плунжерного устройства 100 выполнены также так, что, когда плунжерное устройство 100 собрано, и к приводу не прикладывается никакого усилия, плунжер 104 удерживается в его положении, и усилие пружины не может двигать плунжер 104 в направлении стрелки А. Поэтому перемещение привода 106 оперирующим врачом задает смещение плунжера 104 и скорость введения.
Таким образом, при применении пользователем, например, хирургом, в случае исполнения в виде составной части устройства введения ИОЛ, плунжер 104 проталкивает ИОЛ через самое узкое сечение сопла 114 в переднюю камеру глаза. Относительно большое усилие, необходимое для этого, (возможно, вплоть до 50 Н, в зависимости от выбранной линзы и выбранного варианта вязкоупругого средства) обеспечивается пружиной 110. Когда усилие введения резко ослабляется после того, как большая часть линзы прошла через самое узкое сечение сопла 114, точное регулирование, необходимое для предотвращения травмы глаза, обеспечивается плавной регулировкой привода 108.
Как можно видеть, поэтому представленное выше примерное плунжерное устройство находит применение в устройстве введения ИОЛ (или подобном устройстве) для сравнительно облегченного введения ИОЛ (для подачи других объектов или вязких материалов), при манипулировании одной рукой. Примерное устройство введения представляется усовершенствованным по сравнению с многочисленными существующими устройствами, рассчитанными на работу одной рукой, за счет уменьшения усилия, которое хирург должен приложить, чтобы протолкнуть линзу через сопло, и улучшения управляемости в момент, когда линза выходит из сопла. Усилие, необходимое для проталкивания ИОЛ через сопло 114, было бы иначе слишком большим, что неудобно для введения линзы одной рукой.
Плунжерное устройство
Плунжерное устройство 100 подробно описано далее, исключительно для примера, со ссылкой на фигуры 2(a) и 2(b) и фигуры 3(a) и 3(b). Фигура 2(a) является схематичным трехмерным изображением с пространственным разделением деталей плунжерного устройства 100, показанного на фигуре 1(a). Фигура 2(b) является схематичным трехмерным изображением плунжера 104 плунжерного устройства 100. Фигура 3(a) является схематичным трехмерным изображением в разрезе плунжера 104 и корпуса 106 примерного плунжерного устройства 100, показанного на фигуре 1(a) в частично собранном состоянии. Фигура 3(b) является схематичным трехмерным изображением в разрезе плунжера 104, корпуса 106 и привода 108 примерного плунжерного устройства 100, показанного на фигуре 1(a), в собранном состоянии.
Как видно на фигурах 2(a)-3(b), плунжер 104 содержит наконечник 118 плунжера для выталкивания ИОЛ 102 из сопла 114 камеры для подачи ИОЛ, в общем дискообразный держатель 120 пружины для удерживания пружины 110 и в общем цилиндрический стержень 122 плунжера. Наконечник 118 плунжера, держатель 120 пружины и стержень 122 плунжера располагаются соосно друг другу вдоль общей центральной оси (оси Х-Х'). Стержень 122 плунжера продолжается от держателя 120 пружины в одном направлении вдоль центральной оси Х-Х', и наконечник 118 плунжера продолжается в противоположном направлении.
Стержень 122 плунжера содержит резьбовый участок 124, участок 126 сцепления и стопор 128 плунжера, расположенные вдоль центральной оси Х-Х'. Резьбовый участок 124 располагается на конце стержня 122 плунжера, который наиболее удален от наконечника 118 плунжера; стопор 128 плунжера располагается на конце стержня 122 плунжера, который является ближайшим к наконечнику 118 плунжера; и участок 126 сцепления располагается между стопором 128 плунжера и резьбовым участком 124.
Корпус 106 содержит первый полый удлиненный, в общем, цилиндрический корпусной участок 130 и второй полый удлиненный, в общем, цилиндрический корпусной участок 132. Первый корпусной участок 130 имеет меньший диаметр, чем второй корпусной участок 132, и располагается соосно с ним. Первый корпусной участок 130 продолжается от второго корпусного участка 132 по направлению к концу наконечника плунжера плунжерного устройства 100 в собранном состоянии.
На конце второго корпусного участка 130 обеспечен, в общем, кольцеобразный фланец 134, который наиболее удален от наконечника 118 плунжера, когда плунжерное устройство 100 собрано. Фланец 134 имеет больший диаметр, чем второй корпусной участок 132, и располагается соосно с ним. Поэтому фланец 134 позволяет пользователю захватить парой пальцев поверхность фланца со стороны плунжера, во время работы, чтобы удерживать корпус 106 в нужном положении, с одновременным приложением давления к приводу 108 подобно тому, как в случае со шприцом или чем-то подобным.
Как лучше всего видно на фигурах 3(a) и 3(b), корпус 106 снабжен также полым удлиненным, в общем, цилиндрическим внутренним участком 136, который продолжается в направлении, противоположном первому корпусному участку 130, во второй корпусной участок 132. Внутренний участок 136 имеет меньший диаметр, чем внутренняя камера, сформированная вторым корпусным участком 132, и располагается соосно с ней. Таким образом, внутренний участок 136 и второй корпусной участок 130 совместно образуют камеру 137 кольцевого поперечного сечения внутри второй корпусной участок 132.
Внутренний участок 136 и первый корпусной участок 130 образуют каждый соответствующую, в общем, цилиндрическую внутреннюю камеру, которая открыта на обоих концах. Данные внутренние камеры, расположенные соосно друг с другом, формируют по существу непрерывный центральный канал 138, который открыт на обоих концах. Внутренний участок 136 и первый корпусной участок 130 корпуса 106 и резьбовый участок 124 и участок 126 сцепления стержня 122 плунжера имеют форму и размеры, которые соответственно выполнены с возможностью вмещения со скольжением резьбового участка 124 и участка 126 сцепления в и через центральный канал 138 корпуса 106, когда плунжерное устройство 100 собирают.
Первый корпусной участок 130 и стопор 128 плунжера стержня 122 плунжера соответственно выполнены так, что, когда стержень 122 плунжера вмещают со скольжением в центральный канал 138 во время сборки, стопор 128 плунжера придет, наконец, в контакт с концом первого корпусного участка 130, который находится ближе всего к наконечнику 118 плунжера, и задержит дальнейшее перемещение стержня 122 плунжера в центральный канал 138.
Участок 126 сцепления стержня 122 плунжера имеет приблизительно такую же длину, как первый корпусной участок 130 и, как видно на фигуре 2(b), содержит множество шпоночных элементов 126'. Данные шпоночные элементы 126' сформированы для зацепления с ответными совместимыми шпоночными элементами 130', обеспеченными в первом корпусном участке 130, чтобы блокировать вращение плунжера 104, когда стержень 122 плунжера размещен в центральном канале 138. В данном примере, шпоночные элементы 126' участка 126 сцепления содержат множество шпонок, которые продолжаются по длине участка 126 сцепления. Шпоночные элементы 130' первого корпусного участка 130 содержат множество канавок, которые продолжаются вдоль центрального канала 138 по длине первого корпусного участка 130 и выполнены с возможностью зацепления со шпонками 126'. Однако следует понимать, что для блокировки вращения плунжера 104 можно использовать любой подходящий механизм.
Резьбовый участок 124 стержня 122 плунжера имеет длину, которая превышает длину второго корпусного участка 132 корпуса 106, вследствие чего, когда стержень 122 плунжера полностью вместился в центральный канал 138, так что стопор 128 плунжера упирается в первый корпусной участок 130, резьбовый участок продолжается через второй корпусной участок 132 и за его конец, который наиболее удален от наконечника 118 плунжера.
Привод 108 содержит удлиненный, в общем, цилиндрический полый стержень 14 0 привода, содержащий одну или более спиральных канавок, созданных на его внутренней поверхности для формирования внутренней резьбовой поверхности 142, и в общем круглое отверстие, соответственно, на каждом конце. На конце привода 108, который наиболее удален от наконечника 118 плунжера, когда плунжерное устройство 100 собрано, предусмотрена головка 144 привода. Головка 144 привода содержит, в общем, кольцевой участок 144-1, который имеет больший диаметр, чем стержень 140 привода, и располагается соосно с ним, и колпачок 144-2. Кольцевой участок 144-1 и стержень 140 привода соответственно выполнены с возможностью образования углубления, в которое может вмещаться с возможностью извлечения колпачок 144-2, чтобы закрывать привод 108 на конце, который наиболее удален от наконечника 118 плунжера.
По окружности внутренней поверхности отверстия на конце привода 108, который находится дальше всего к наконечнику 118 плунжера, обеспечен фрикционный элемент 14 6. Как видно на фигуре 3(b), фрикционный элемент 146 выполнен с возможностью взаимного сцепления с цилиндрическим внутренним участком 136 корпуса 106, когда плунжерное устройство 100 собрано, и обеспечивает постоянную силу сопротивления, когда привод 108 вдвигается в корпус 106 по оси Х-Х', в направлении стрелки А.
Фрикционный элемент 146 может содержать любой подходящий механизм для обеспечения необходимой величины сопротивления перемещению привода 108. В данном примере, фрикционный элемент содержит кольцо из подходящего материала (например, резины или подобного материала), которое выполнено с возможностью плотного охвата внутреннего участка 136 корпуса 106, когда плунжерное устройство 100 собрано, как видно на фигуре 3(b). Поэтому можно видеть, что фрикционный элемент подобен резиновой втулке или подобной детали, которая создает трение во время работы одноразового шприца. Однако следует понимать, что аналогичный фрикционный элемент может быть, в качестве альтернативы или дополнительно, обеспечен по окружности внешней поверхности стержня 140 привода для сцепления с внутренней поверхностью второго корпусного участка 132 корпуса 106. Кроме того, можно применить более сложную схему, в которой фрикционный элемент 14 6 и/или связанный(ые) элемент(ы) корпуса 106 специально выполнены с возможностью уменьшения разности между трением покоя и трением движения.
Второй корпусной участок 132 корпуса 106 и стержень 14 0 привода соответственно выполнены для вмещения со скольжением стержня 140 привода в корпус 106 от конца второго корпусного участка 132, который наиболее удален от наконечника 118 плунжера во время работы. Второй корпусной и внутренний участки 132, 136 корпуса 106, стержень 14 0 привода и фрикционный элемент 14 6 соответственно выполнены так, что, когда стержень 140 привода вдвигается в корпус 106 и конец привода 108, ближайший к наконечнику 118 плунжера входит в камеру 137 с кольцевым поперечным сечением, фрикционный элемент 146 плотно охватывает по окружности внешнюю поверхность внутреннего участка 136, чтобы создавать постоянную силу сопротивления перемещению привода 108.
Стержень 140 привода также содержит множество шпоночных элементов 14 8 для зацепления с соответствующими шпоночными элементами, созданными во втором корпусном участке 132, чтобы блокировать вращение привода 108, когда стержень 140 привода размещен с возможностью скольжения в корпусе 106. В данном примере шпоночные элементы 14 8 стержня 140 привода содержат множество шпонок, которые продолжаются по существу по длине стержня 140 привода. Шпоночные элементы второго корпусного участка 132 содержат множество канавок, которые продолжаются по существу по длине второго корпусного участка 132 и выполнены с возможностью зацепления со шпонками 148 стержня привода. Однако следует понимать, что для блокировки вращения привода 108 можно использовать любой подходящий механизм.
Пружина 110 обеспечена с охватом и вдоль оси стержня 122 плунжера и первого корпусного участка 130. Стержень 122 плунжера и корпусные участки 130, 132 корпуса выполнены так, что, когда плунжерное устройство 100 полностью собрано и готово к использованию, пружина находится в предварительно сжатом состоянии и удерживается между держателем 120 пружины плунжерного устройства 100 и концом второго корпусного участка 132 большего диаметра. Таким образом, пружина прикладывает усилие пружины к плунжеру 104, в направлении стрелки А, от привода 108 и корпуса 106.
Как видно на фигурах 2a)-3(b), плунжерное устройство 100 содержит также вращающийся элемент, который, в данном примере, выполнен в форме гайки 150. Гайка 150 имеет внутреннюю резьбовую поверхность 152 и внешнюю резьбовую поверхность 154.
Внутренняя резьбовая поверхность 152 гайки 150 и резьбовый участок 124 стержня 122 плунжера соответственно выполнены с возможностью зацепления друг с другом, чтобы гайка 150 могла навинчиваться на резьбовый участок 124 и линейно перемещаться относительно резьбового участка 124, когда гайка 150 вращается вокруг центральной оси Х-Х'. В данном примере резьба на внутренней резьбовой поверхности 152 гайки 150 и резьба резьбового участка 124 имеют относительно большой шаг и соответственно выполнены так, что, если гайка 150 вращается в направлении ϕ, то смещение гайки 150 относительно наконечника 118 плунжера увеличивается (и наоборот). В данном примере обеспечивается преимущество в том, что резьба резьбового участка 124 имеет множество заходов резьбы, однако следует понимать, что это не обязательно.
Для иллюстрации, в данном примере самотормозящегося плунжера, типичный диапазон изменения шага составляет от однократного до двукратного среднего диаметра резьбы плунжера, хотя следует понимать, что выбор материала влияет на оптимальный шаг и поэтому в зависимости от используемого материала могут подходить значения за пределами приведенного диапазона.
Внешняя резьбовая поверхность 154 гайки 150 и внутренняя резьбовая поверхность 142 стержня 140 привода соответственно выполнены с возможностью зацепления друг с другом, чтобы гайка 150 могла ввинчиваться в стержень 140 привода и линейно перемещаться относительно стержня 140 привода, когда гайка 150 вращается вокруг центральной оси Х-Х'. В данном примере резьба на внешней резьбовой поверхности 154 гайки 150 и резьба на внутренней резьбовой поверхности 142 стержня 140 привода имеют относительно большой шаг и соответственно выполнены так, что, если гайка 150 вращается в направлении ϕ, то смещение гайки 150 относительно головки 144 привода уменьшается (и наоборот). В данном примере обеспечивается преимущество в том, что резьба на внутренней резьбовой поверхности 142 имеет множество заходов резьбы, хотя следует понимать, что это не обязательно.
Как видно на фигуре 3(b), когда плунжерное устройство 100 полностью собрано, гайка 150 находится как в резьбовом зацеплении с резьбовым участком 124 стержня 122 плунжера, так и в резьбовом зацеплении с внутренней поверхностью 142 стержня 140 привода. Гайка 150 располагается внутри стержня 140 привода, между фрикционным элементом 146 и головкой 144 привода, с упором в конец внутреннего участка 136 корпуса 106. Таким образом, линейное перемещение гайки 150 по направлению к наконечнику 118 плунжера в направлении стрелки А блокируется. Тем самым данный механизм допускает управление смещением наконечника 118 плунжера посредством вращения гайки 150.
В данном примере резьбы в месте сопряжения резьбового участка 124 с гайкой 150 выполнены так, что гайка 150 является самотормозящейся относительно стержня 122 плунжера. То есть, когда оперирующий врач прикладывает усилие к головке 144 привода, чтобы сдвигать стержень 140 привода в корпус 106, перемещение привода 108 не блокируется гайкой 150. Напротив, гайка 150 начинает вращаться внутри стержня 140 привода и вокруг резьбового участка 124 стержня 122 плунжера, без аксиального перемещения гайки 150, так как аксиальное перемещение блокируется внутренним участком 136 корпуса 106. Поэтому плунжер 104 начинает перемещаться аксиально в направлении стрелки А под действием усилия, прилагаемого пружиной 110 к держателю 120 пружины, и без вращения, так как вращение плунжера 104 заблокировано шпоночными элементами 126' участка 126 сцепления.
Как можно видеть, вращение гайки 150 на заданный суммарный угол вращения обеспечивает тем самым выход плунжера в направлении стрелки А под действием усилия, прикладываемого пружиной 110, на суммарное аксиальное смещение, которое является соразмерным углу вращения. Данная зависимость между угловым и линейным смещениями допускает значительно усовершенствованное управление по сравнению с муфтовыми и подобными механизмами, которые выполняют удерживание плунжера с преодолением усилия пружины, пока муфтовый или подобный механизм приводится в действие, и пружина разжимается резче и менее управляемо. Зависимость между угловым и линейным смещениями обычно будет пропорциональной зависимостью, при которой относительно большое угловое смещение гайки 150 обеспечивает относительно небольшое аксиальное перемещение плунжера в продольном направлении по стрелке А.
Усилие, которое оперирующий врач, например хирург, прилагает к приводу 108, является поэтому фактически постоянным усилием. Данное по существу постоянное усилие равно усилию, необходимому для преодоления силы сопротивления, создаваемой фрикционным элементом 146, чтобы перемещать привод 108 относительно корпуса 106, за вычетом результирующего усилия, в направлении стрелки А, которое внешняя резьба гайки 150 прикладывает к резьбе стержня 140 привода (например, в результате усилия пружины 110, действующего на плунжер 104, чтобы приводить вращательное движение гайки 150).
Как можно видеть, благодаря соответствующему расчету различных шагов резьб и фрикционного элемента 146, плунжерное устройство может быть выполнено так, чтобы обеспечивать усилие пружины, не достаточное для инициирования обратного вращения гайки 150, в отсутствие приведения в действие привода 108.
В данном примере вышеописанные резьбовые участки плунжерного устройства 100 выполнены также с возможностью обеспечения по существу взаимно однозначного отношения между смещением привода и смещением плунжера.
В данном примере существует некоторое число выбранных вариантов конструкций, которые можно использовать для оптимизации плунжерного устройства 100, в частности, для минимизации аксиального усилия со стороны гайки 150, без фактического изменения направления усилия. Данные выбранные варианты включают в себя, например, выбор: типов используемого материала; шероховатостей поверхностей; шагов и профилей резьбы; и конструкции подпятника между гайкой 150 и корпусом 106.
Фигура 4 является графиком, концептуально представляющим усилия, действующие на различные части примерного плунжерного устройства 100, показанного на фигуре 1(a), при реализации в виде части устройства введения ИОЛ, во время работы, в зависимости от смещения наконечника 118 плунжера.
Как показано на фигуре 4, усилие пружины уменьшается по существу линейно от максимального значения, когда пружина 110 находится в предварительно сжатом состоянии, и наконечник 118 плунжера имеет нулевое смещение, до низкого значения, когда ИОЛ 102 высвобождается. Усилие введения, необходимое для введения ИОЛ 102 в глаз, увеличивается, когда ИОЛ 102 втискивается в сужающееся сопло 114, до резкого уменьшения, когда ИОЛ 102 проходит через конец сопла 114. Усилие оперирующего врача, необходимое для приведения в движение привода 108, сохраняется небольшим и постоянным в ходе всей процедуры.
Как должно быть понятно специалистам в данной области, сухое трение скольжения может быть значительно слабее, чем сухое трение покоя. Слишком большое различие между значениями трения упомянутых видов может приводить к заметному и нежелательному трению покоя. Соответственно, используемые материалы выбирают с учетом упомянутой особенности, чтобы останов и начало движения не приводили к значительным максимумам усилия оперирующего врача.
Следовательно, можно видеть, что усилие на плунжере развязано с усилием приведения в действие, и смещение привода 106 оперирующим врачом, приводит к соответствующему смещению наконечника 118 плунжера, которым можно управлять с повышенной точностью. Таким образом, плунжерным устройством 100 можно манипулировать одной рукой, что уменьшает усилие, которое иначе должен прикладывать оперирующий врач, а также обеспечивает более точное управление.
Сборка и хранение плунжерного устройства
Возможные сборка и хранение плунжерного устройства будут описаны только в качестве примера, со ссылкой на фигуру 5, которая является схематичным трехмерным изображением в разрезе и с частичным пространственным разделением деталей примерного плунжерного устройства 100, показанного на фигуре 1(a), во время сборки. Следует понимать, что описанный способ сборки является наглядным, и что можно применять разные способы сборки, в зависимости от способа реализации плунжерного устройства 100.
Во время сборки плунжер 104, пружина 110 корпус 106, фрикционный элемент 146 и привод 108 собирают, как показано на фигуре 5, в рамках начальной серии этапов сборки. Конкретнее, пружину 110 надевают на стержень 122 плунжера впритык к держателю 120 пружины, и плунжер 104 вставляют в первый корпусной участок 130 корпуса 106 и продвигают в начальное положение, тем самым сжимая пружину 110. Фрикционный элемент 146 устанавливают на заданном месте либо внутри стержня 140 привода или с охватом выступающего конца внутреннего участка 136 корпуса 106. Стержень 140 привода 108 вставляют в первый корпусной участок 130 корпуса 106, чтобы поместить привод 108 в его начальное положение, с фрикционным элементом 146, находящимся в зацеплении в заданном положении как внутри стержня 140 привода, так и с обхватом внутреннего участка 136 корпуса 106.
Для облегчения сборки и разборки, как видно на фигуре 5, плунжерное устройство 100 в настоящем примере выполнено с возможностью обеспечения доступа для установки и съема гайки 150 через отверстие на конце стержня 140 привода, наиболее удаленном от наконечника 118 плунжера, путем съема колпачка 144-2.
Гайку 150 подводят через отверстие доступа в стержне 14 0 привода и вкручивают, пока гайка не приходит в контакт с выступающим концом внутреннего участка 136 корпуса 106. Для этого может быть предусмотрен такой инструмент, как трубчатый ключ или что-то подобное, с парой монтажных выступов. После того как гайка 150 достигает концевого положения, плунжерное устройство 100 является механически подготовленным, и отверстие в стержне 140 привода можно закрыть колпачком 144-2.
Для насаживания на концы предварительно сжатой пружины и для принятия на себя нагрузки пружины 110 во время хранения может быть предусмотрен съемный фиксатор 160 пружины или подобный элемент. Фиксатор 160 защищает плунжерное устройство 100 от сползания, которое иначе может возникать в результате сил, прилагаемых напряженной пружиной. Фиксатор 160 можно снимать в рамках процедуры подготовки устройства перед использованием.
Модификации и альтернативы
Выше подробно описан пример. Как должно быть понятно специалистам в данной области техники, для вышеописанных вариантов осуществления можно разработать большое число модификаций и альтернатив, с получением при этом преимуществ от настоящего изобретения.
Например, следует понимать, что, хотя вышеописанный пример связан с устройством введения ИОЛ, описанные технические принципы можно распространить на процедуры, не относящиеся к имплантации ИОЛ. Например, изложенные принципы можно применить в любой ситуации, в которой от практикующего врача или другого оперирующего врача требуется прикладывать потенциально большое усилие, при одновременном обеспечении точности и управления на высоком уровне, чтобы ввести материал или объект. Даже если требуется не особенно большое усилие или высокая точность, то, как должно быть понятно специалистам в данной области, вышеописанные признаки способны уменьшать опасность травмы, возникающей из-за повторяющейся нагрузки при любой подобной процедуре, в ходе которой от оперирующего врача требуется каждодневно вводить вещество (материал) или объект. Например, в ортопедии подобные процедуры могут включать в себя инъекцию биоматериалов, костный цемент и гиалуроновую кислоту. Подобные применения можно обнаружить в хирургии позвоночника и стоматологии.
Как можно видеть, примерное вышеописанное плунжерное устройство выполнено с возможностью исключения любого люфта в цепочке компонентов от привода к наконечнику плунжера, и что в устройстве имеется по существу взаимно однозначная взаимосвязь между положением привода и положением плунжера. Это означает, что концепция пригодна для любого применения, в котором достигается точное положение чего-то на наконечнике плунжера посредством управления смещением привода. Другие применения, которые могут использовать выгоду такого управления, можно обнаружить в кардиологии, например, при замене клапанов сердца и стентов, и в неврологии.
Наличие предварительно напряженной пружины, обеспечивающей по существу отсутствие люфта в устройстве введения, означает, что теми же принципами можно воспользоваться, чтобы обеспечить высокоточный инструмент, который можно применять для точной и измеримой доставки дорогих лекарств.
Тем не менее следует понимать, что соотношение между смещением привода и смещением плунжера не обязательно должно быть взаимно однозначным. При соответствующей конструкции, привод и стержень плунжера могут быть выполнены так, что небольшое смещение привода приведет к большому смещению плунжера, что может быть полезно, когда устройство, в котором реализовано плунжерное устройство, применяется для быстрой доставки некоторого количества материала (вещества). И наоборот, привод и стержень плунжера могут быть выполнены так, что большое смещение привода дает небольшое смещение плунжера (например, чтобы обеспечить более точное управление на наконечнике плунжера). Соотношение между смещениями привода и плунжера может быть по существу обеспечено равным постоянному числу, например, когда 10-мм смещение привода вызывает ход плунжера, например, 0,5 мм.
Следует понимать, что устройство может быть либо одноразовым устройством, либо устройством многоразового применения.
Следует понимать, что, хотя применение предварительно сжатой пружины для обеспечения источника энергии для приведения в движение плунжера особенно выгодно, можно применить другой источник механической энергии, либо вместо пружины, либо дополнительно к ней. Например, можно применить пневматический или подобный привод. Такой пневматический привод может, например, работать от источника сжатого воздуха, отдельного от инжекторного устройства и подсоединенного к устройству посредством гибкой трубки или чего-то подобного. Сжатый воздух является, в общем, легко доступным источником энергии, хотя такими пневматическими приводами может быть иногда трудно управлять.
Следует понимать, что пружина может быть расположена в напряженном состоянии для обеспечения источника энергии для приведения в движение плунжера.
Хотя в вышеописанном примере вращение самотормозящейся гайки управляется перемещениями аксиально управляемого привода, однако управлять вращением можно другими способами. Например, управление вращением может обеспечиваться вращательным демпфером, таким как электромеханический демпфер. Оперирующий врач по данному сценарию может быть, например, снабжен средством для включения или выключения демпфера и/или колесиком, присоединенным к регулируемому резистору, чтобы управлять скоростью введения.
Следует понимать, что, хотя резьбы в вышеописанном примере подобраны так, что гайка является самотормозящейся относительно резьбового участка стержня плунжера, можно реализовать плунжерное устройство, в котором резьбы выполнены так, что гайка не является самотормозящейся относительно плунжера. В конструкции, в которой гайка не может самостоятельно тормозиться плунжером, она по-прежнему может приводиться во вращение приводом, как описано для вышеприведенного примера, хотя усилия, действующие между гайкой и приводом, будут различаться, когда будут задействованы разные стороны профиля резьбы. Например, если гайка не является самотормозящейся относительно плунжера, то усилие, которое оперирующий врач прикладывает к приводу, будет обычно равно сумме усилия, необходимого для перемещения привода относительно корпуса, и усилия, которое привод прикладывает к резьбе гайки, чтобы заставить гайку вращаться.
В плунжерном устройстве можно обеспечить механизм для приложения усилия для активного вращения гайки и, следовательно, обеспечения движения плунжера в переднем направлении. Хотя такой механизм особенно полезен, когда гайка не является самотормозящейся, его можно также с пользой применять, когда гайка является самотормозящейся. Например, гайка может приводиться во вращение электромеханическим средством, например, редукторным двигателем или шаговым двигателем, когда хирург снабжен средством для останова и запуска вращения и, возможно, для управления скоростью введения. Преимущество предварительно сжатой пружины, обеспечивающей основное механическое приводное усилие, в данном случае состоит в том, что от электродвигателя требуется обеспечивать только сравнительно слабый вращательный момент, т.е. достаточный для преодоления трения.
В качестве альтернативы или дополнительно, в кольцевой полости может быть предусмотрена торсионная пружина, которая предварительно нагружается, когда устройство собирают. Данная торсионная пружина может быть выполнена с возможностью воздействия на гайку, чтобы создавать активное усилие для вращения гайки в направлении, которое будет приводить в действие плунжер.
В примере, описанном со ссылкой на фигуры, ни плунжеру, ни приводу не дано возможности вращаться относительно корпуса благодаря наличию шпоночных элементов в форме шпонок и соответствующих канавок. Следует понимать, что существуют другие способы для обеспечения подобного эффекта. Шпоночные элементы между корпусом и плунжером могут быть, например, спиральными, с обеспечением того, чтобы их шаг и направление отличалось от резьбового зацепления между плунжером и гайкой. В реализации, в которой сопряжение между плунжером и корпусом является резьбовым, сопряжение между гайкой и плунжером может быть выбрано в виде прямолинейной шпонки.
Аналогично, возможно видоизменение сопряжений между гайкой и приводом и между приводом и корпусом. Сопряжение между гайкой и приводом может быть прямолинейной шпонкой, тогда как сопряжение между корпусом и приводом может быть резьбовым, или оба сопряжения могут быть резьбовыми.
Резьба между гайкой и приводом может иметь направление, противоположное резьбе на плунжере. В данной конструкции плунжер и привод могут двигаться в противоположных направлениях во время работы, и оперирующий врач должен будет вытягивать привод из корпуса, чтобы обеспечить приведение плунжера в движение в переднем направлении.
Различные другие модификации будут очевидны специалистам и не будут описаны дополнительно подробно в настоящей заявке.
| название | год | авторы | номер документа |
|---|---|---|---|
| УЗЕЛ ПРИВОДА ДЛЯ СИСТЕМЫ ДОСТАВКИ ЛЕКАРСТВ | 2017 |
|
RU2740731C2 |
| УЗЕЛ ПРИВОДА ДЛЯ СИСТЕМЫ ДОСТАВКИ ЛЕКАРСТВ | 2017 |
|
RU2827350C2 |
| УЗЕЛ ПРИВОДА И РАСПОРКА ДЛЯ СИСТЕМЫ ДОСТАВКИ ЛЕКАРСТВ | 2017 |
|
RU2740732C2 |
| РАСПОРНЫЙ УЗЕЛ ДЛЯ СИСТЕМЫ ДОСТАВКИ ЛЕКАРСТВ | 2017 |
|
RU2740846C2 |
| ПРИВОДНОЙ УЗЕЛ ДЛЯ СИСТЕМЫ ДОСТАВКИ ЛЕКАРСТВ | 2017 |
|
RU2741461C2 |
| ПРИВОДНОЙ УЗЕЛ ИГЛЫ ДЛЯ СИСТЕМЫ ДОСТАВКИ ЛЕКАРСТВ | 2017 |
|
RU2742499C2 |
| ТОЧНЫЙ, ПРЕЦИЗИОННЫЙ МИКРОЛИТРОВЫЙ ДОЗИРУЮЩИЙ ШПРИЦ | 2017 |
|
RU2738018C2 |
| ПРИВОДНОЙ УЗЕЛ ДЛЯ СИСТЕМЫ ДОСТАВКИ ЛЕКАРСТВ | 2017 |
|
RU2822951C2 |
| ПРИВОДНОЙ МЕХАНИЗМ ДЛЯ УСТРОЙСТВА ВВЕДЕНИЯ ЛЕКАРСТВ | 2005 |
|
RU2387461C2 |
| УСТРОЙСТВО ДЛЯ ИНЪЕКЦИИ | 1991 |
|
RU2033193C1 |
Изобретение относится к плунжерному устройству для устройства введения для размещения вещества, материала или объекта и к соответствующим способам. Настоящее изобретение относится, в частности, но не исключительно, к плунжерному устройству для устройства для имплантации интраокулярной линзы (ИОЛ) в глаз субъекта и к соответствующим способам изготовления и применения такого устройства. Плунжерное устройство для устройства введения для вытеснения по меньшей мере одного объекта и/или материала в пациента содержит корпус, плунжер, источник, запасенной механической энергии, вращающийся элемент, удерживаемый в корпусе, и привод для приведения в действие оперирующим врачом плунжерного устройства. Плунжер выполнен с возможностью перемещения в аксиальном направлении относительно корпуса, для вытеснения, по меньшей мере, одного объекта и/или материала из сопла устройства введения. Источник запасенной механической энергии обеспечивает движущее усилие для перемещения плунжера в аксиальном направлении относительно корпуса. Вращающийся элемент выполнен с возможностью вращения относительно корпуса вокруг оси вращения, которая параллельна аксиальному направлению, причем вращение вращающегося элемента на заданный суммарный угол вращения обеспечивает управляемое высвобождение плунжера для перемещения плунжера в аксиальном направлении относительно корпуса под действием усилия, обеспечиваемого источником запасенной механической энергии, для продольного смещения, которое зависит от суммарного угла вращения. Привод для приведения в действие оперирующим врачом плунжерного устройства предназначен для того, чтобы вызывать вращение вращающегося элемента относительно корпуса для обеспечения управляемого высвобождения плунжера для аксиального перемещения плунжера под действием усилия, обеспечиваемого источником запасенной механической энергии. Устройство введения для вытеснения по меньшей мере одного объекта и/или материала в пациента содержит сопло для вытеснения по меньшей мере одного объекта и/или материала и вышеописанное плунжерное устройство. Способ вытеснения по меньшей мере одного объекта и/или материала в пациента содержит следующие этапы: обеспечивают вышеописанное устройство введения, причем устройство введения содержит по меньшей мере один объект и/или материал, подлежащий вытеснению; и приводят в действие привод плунжерного устройства устройства введения, чтобы вызвать вращение вращающегося элемента относительно корпуса для обеспечения управляемого высвобождения плунжера для аксиального перемещения плунжера под действием усилия, обеспечиваемого источником, запасенной механической энергии, чтобы тем самым вытеснить по меньшей мере один объект и/или материал. Способ изготовления вышеописанного плунжерного устройства содержит следующие этапы: обеспечивают корпус, плунжер, источник, запасенной механической энергии, вращающийся элемент и привод вышеописанного плунжерного устройства; и собирают корпус, плунжер, источник, запасенной механической энергии, вращающийся элемент и привод, чтобы сформировать вышеописанное плунжерное устройство. Изобретение позволяет практикующему врачу или другому оперирующему врачу (оператору) точно и управляемо дозировать вязкое вещество (материал) или размещать небольшой объект (часто удерживаемый в вязкой среде) с прикладыванием относительно небольшого усилия. 4 н. и 21 з.п. ф-лы, 5 ил.
1. Плунжерное устройство для устройства введения для вытеснения по меньшей мере одного объекта и/или материала в пациента, при этом плунжерное устройство содержит:
корпус;
плунжер, выполненный с возможностью перемещения в аксиальном направлении относительно корпуса, для вытеснения, по меньшей мере, одного объекта и/или материала из сопла устройства введения;
источник, запасенной механической энергии, для обеспечения движущего усилия для перемещения плунжера в аксиальном направлении относительно корпуса;
вращающийся элемент, удерживаемый в корпусе и выполненный с возможностью вращения относительно корпуса вокруг оси вращения, которая параллельна аксиальному направлению, причем вращение вращающегося элемента на заданный суммарный угол вращения обеспечивает управляемое высвобождение плунжера для перемещения плунжера в аксиальном направлении относительно корпуса под действием усилия, обеспечиваемого источником запасенной механической энергии, для продольного смещения, которое зависит от суммарного угла вращения; и
привод для приведения в действие оперирующим врачом плунжерного устройства, чтобы вызывать вращение вращающегося элемента относительно корпуса для обеспечения управляемого высвобождения плунжера для аксиального перемещения плунжера под действием усилия, обеспечиваемого источником запасенной механической энергии.
2. Плунжерное устройство по п. 1, в котором плунжер и корпус соответственно выполнены с возможностью аксиального перемещения друг относительно друга, при котором вращение плунжера относительно корпуса, когда плунжер перемещается в аксиальном направлении, блокируется.
3. Плунжерное устройство по п. 1 или 2, в котором плунжер и вращающийся элемент имеют каждый соответствующую резьбовую поверхность, при этом резьбовые поверхности плунжера и вращающегося элемента выполнены с возможностью взаимного зацепления, причем вращающийся элемент выполнен с возможностью вращения относительно плунжера, когда вращающийся элемент вращается относительно корпуса, для обеспечения управляемого высвобождения плунжера.
4. Плунжерное устройство по п. 3, в котором резьбовые поверхности плунжера и вращающегося элемента выполнены так, что вращающийся элемент является самотормозящимся относительно плунжера.
5. Плунжерное устройство по п. 3 или 4, в котором резьбовые поверхности плунжера и вращающегося элемента выполнены с возможностью блокирования аксиального перемещения плунжера относительно корпуса, когда вращающийся элемент не вращается.
6. Плунжерное устройство по п. 1, в котором вращающийся элемент и плунжер соответственно выполнены с возможностью аксиального перемещения друг относительно друга, при котором вращение вращающегося элемента, относительно плунжера, когда плунжер перемещается в аксиальном направлении, блокируется.
7. Плунжерное устройство по п. 1 или 6, в котором плунжер и корпус имеют каждый соответствующую резьбовую поверхность, при этом резьбовые поверхности плунжера и корпуса выполнены с возможностью взаимного зацепления, вследствие чего плунжер выполнен с возможностью вращения относительно корпуса, когда вращающийся элемент вращается относительно корпуса, чтобы обеспечивать управляемое высвобождение плунжера.
8. Плунжерное устройство по любому предыдущему пункту, в котором вращающийся элемент и корпус соответственно выполнены с возможностью вращательного движения друг относительно друга, при котором аксиальное перемещение вращающегося элемента относительно корпуса блокируется.
9. Плунжерное устройство по любому предыдущему пункту, в котором источник, запасенной механической энергии, содержит пружину, которая располагается для хранения упругой потенциальной энергии до приведения в действие плунжерного устройства для обеспечения движущего усилия для перемещения плунжера.
10. Плунжерное устройство по п. 9, в котором пружина располагается так, чтобы находиться в сжатом состоянии для хранения упругой потенциальной энергии до приведения в действие плунжерного устройства для обеспечения движущего усилия для перемещения плунжера.
11. Плунжерное устройство по любому из пп. 1-8, в котором источник, запасенной механической энергии, содержит пневматический привод для обеспечения пневматического усилия в качестве движущего усилия для перемещения плунжера.
12. Плунжерное устройство по любому предыдущему пункту, в котором привод выполнен с возможностью аксиального перемещения оперирующим врачом относительно корпуса, при этом аксиальное перемещение привода вызывает вращение вращающегося элемента относительно корпуса для обеспечения управляемого выхода плунжера.
13. Плунжерное устройство по любому предыдущему пункту, в котором привод и корпус соответственно выполнены с возможностью аксиального перемещения друг относительно друга, при котором вращение привода относительно корпуса, когда привод перемещают в аксиальном направлении, блокируется.
14. Плунжерное устройство по любому предыдущему пункту, в котором привод и вращающийся элемент имеют каждый соответствующую резьбовую поверхность, при этом резьбовые поверхности привода и вращающегося элемента выполнены с возможностью взаимного зацепления, причем вращающийся элемент выполнен с возможностью вращения относительно привода, когда привод перемещают в аксиальном направлении, чтобы тем самым обеспечить управляемое высвобождение плунжера.
15. Плунжерное устройство по п. 14, в котором резьбовые поверхности привода и вращающегося элемента выполнены так, что вращающийся элемент является самотормозящимся относительно привода.
16. Плунжерное устройство по любому из пп. 1-11, в котором вращающийся элемент и привод соответственно выполнены с возможностью аксиального перемещения друг относительно друга, при котором вращение вращающегося элемента относительно привода, когда привод перемещают в аксиальном направлении, блокируется.
17. Плунжерное устройство по любому из пп. 1-11 или 16, в котором привод и корпус имеют каждый соответствующую резьбовую поверхность, при этом резьбовые поверхности привода и корпуса выполнены с возможностью взаимного зацепления, вследствие чего привод выполнен с возможностью вращения относительно корпуса, чтобы вращать вращающийся элемент относительно корпуса для обеспечения тем самым управляемого высвобождения плунжера.
18. Плунжерное устройство по любому предыдущему пункту, в котором привод обеспечен электромеханическим механизмом для приведения во вращение вращающегося элемента относительно корпуса и переключателем для приведения в действие электромеханического механизма оперирующим врачом, чтобы управлять работой вращающегося элемента для обеспечения тем самым управляемого высвобождения плунжера.
19. Плунжерное устройство по любому предыдущему пункту, дополнительно содержащее по меньшей мере один дополнительный источник механической энергии для обеспечения движущего усилия для вращения вращающегося элемента.
20. Плунжерное устройство по любому предыдущему пункту, дополнительно содержащее, по меньшей мере, один элемент для обеспечения предварительно настроенного сопротивления между приводом и корпусом для сопротивления аксиальному перемещению привода относительно корпуса, вследствие чего привод может перемещаться оперирующим врачом, прикладывающим по существу равномерное усилие, которое достаточно для преодоления предварительно настроенного сопротивления.
21. Плунжерное устройство по любому предыдущему пункту, в котором корпус, плунжер, вращающийся элемент и привод соответственно выполнены с возможностью приведения в действие привода оперирующим врачом, прикладывающим по существу равномерное усилие для перемещения привода в аксиальном направлении, чтобы тем самым вращать вращающийся элемент относительно корпуса для обеспечения управляемого высвобождения плунжера; из первого положения относительно корпуса, в котором плунжерное устройство подготовлено к использованию; во второе положение относительно корпуса, в котором плунжерное устройство выполнено с возможностью вытеснения по меньшей мере одного объекта и/или материала из сопла устройства введения во время работы.
22. Устройство введения для вытеснения по меньшей мере одного объекта и/или материала в пациента, при этом устройство введения содержит сопло для вытеснения по меньшей мере одного объекта и/или материала и плунжерное устройство по любому предыдущему пункту.
23. Устройство введения по п. 22, при этом устройство введения выполнено с возможностью вытеснения интраокулярной линзы в глаз пациента.
24. Способ вытеснения по меньшей мере одного объекта и/или материала в пациента, при этом способ содержит следующие этапы:
обеспечивают устройство введения по п. 22, причем устройство введения содержит по меньшей мере один объект и/или материал, подлежащий вытеснению; и приводят в действие привод плунжерного устройства устройства введения, чтобы вызвать вращение вращающегося элемента относительно корпуса для обеспечения управляемого высвобождения плунжера для аксиального перемещения плунжера под действием усилия, обеспечиваемого источником, запасенной механической энергии, чтобы тем самым вытеснить по меньшей мере один объект и/или материал.
25. Способ изготовления плунжерного устройства по любому из пп. 1-21, при этом способ содержит следующие этапы:
обеспечивают корпус, плунжер, источник, запасенной механической энергии, вращающийся элемент и привод плунжерного устройства по любому из пп. 1-20; и
собирают корпус, плунжер, источник, запасенной механической энергии, вращающийся элемент и привод, чтобы сформировать плунжерное устройство по любому из пп. 1-20.
| US 5129825 A1, 14.07.1992 | |||
| RU 2018146047 A, 09.07.2020 | |||
| ИНЖЕКТОР ДЛЯ ИМПЛАНТАЦИИ ИНТРАОКУЛЯРНОЙ ЛИНЗЫ | 2016 |
|
RU2679306C1 |
| АВТОМАТИЧЕСКОЕ ИНЖЕКТОРНОЕ УСТРОЙСТВО ДЛЯ ВВЕДЕНИЯ ИНТРАОКУЛЯРНОЙ ЛИНЗЫ | 2014 |
|
RU2653997C2 |
| УСТРОЙСТВО ДЛЯ ВВЕДЕНИЯ ИНТРАОКУЛЯРНОЙ ЛИНЗЫ | 2013 |
|
RU2649460C2 |

