Изобретение относится к области авиационной техники, а именно к летательным аппарата вертикального взлета и посадки (ЛА ВВП) и может быть использовано для перевозки пассажиров и грузов, а также для мониторинга окружающей среды, в частности аэрофотосъемки и наблюдения.
Известен «Летательный аппарат вертикального взлета и посадки» по патенту RU №2700154 С1, МПК В64С 27/30, В64С 37/00, опубл. 12.09.2019 БИ №26, содержащий фюзеляж, киль, пару крыльев: переднее и заднее, две подъемные силовые установки, расположенные на выполненных по бокам фюзеляжа с двумя осями вращения и с возможностью фиксации положения пилонах, маршевую силовую установку. Оси вращения пилонов подъемных силовых установок по углу рыска наклонены относительно связанной системы координат и выполнены с возможностью укладки подъемных силовых установок в нишу фюзеляжа. Оси вращения подъемных силовых установок по углу тангажа наклонены относительно пилонов с возможностью обеспечения поворота подъемных силовых установок во взлетно-посадочном режиме полета по углу тангажа. Подъемная силовая установка выполнена с возможностью складывания в нишу фюзеляжа совместным поворотом относительно обеих осей поворота пилона, причем подъемные силовые установки при этом переворачиваются винтами вниз.
Недостатком данного летательного аппарата вертикального взлета и посадки является его конструктивная особенность, заключающая в складывании подъемных силовых установок в нишу фюзеляжа совместным поворотом относительно обеих осей поворота пилона, что требует использования в конструкции нескольких сервоприводов, либо механизма со сложной кинематикой. Размещение подъемных силовых установок внутри фюзеляжа в режиме крейсерского полета уменьшает полезный внутренний объем фюзеляжа. Средства фиксация подъемных силовых установок во взлетно-посадочном режиме должны исключать возможные люфты подъемных силовых установок, которые могут привести к вибрациям летательного аппарата на данном режиме полета. Перечисленные факторы, наряду с использованием отдельной силовой установки для крейсерского полета, а также отсутствием средств стабилизации летального аппарата во взлетно-посадочном режиме, ведут к усложнению конструкции, увеличению веса, снижению надежности и безопасности.
Известен «Беспилотный конвертоплан с канальными винтами» по патенту RU №2629473 С1, МПК В64С 27/28, В64С 37/00, опубл. 29.08.2017 БИ №25, выполненный по аэродинамической схеме «утка» с коротким фюзеляжем, имеющим каплевидную обтекаемую форму. Центроплан имеет два кольцевых выреза, обеспечивающих внутри последних отклонение поворотных кольцевых каналов (ПКК) с редукторами винтов, центры которых размещены по оси Z-Z так, что левый и правый ПКК равноудалены от центра масс и не выходят за заднюю кромку центроплана крыла. В каждом ПКК установлена пара меньших с противоположным вращением двухлопастных винтов, размещенная под центральным большим винтом на вертикальном валу в обтекателе, смонтированном в корпусе центрального тела ПКК на профилированных его ребрах жесткости. Конвертоплан снабжен возможностью преобразования его полетной конфигурации с вертолета шестивинтовой несущей схемы при вертикальном расположении их ПКК в полетную конфигурацию двухвинтового самолета, имеющего отключенные от трансмиссии две пары меньших перекрещивающихся винтов.
Недостатком данного летательного аппарата является размещение поворотных кольцевых каналов в обводах крыла, что с одной стороны огранивает их диаметр и требует использования нескольких соосных винтов для создания требуемой тяги, а с другой стороны - увеличивает площадь крыла летательного аппарата. Следствием этого является усложнение конструкции и увеличение массы крыла и подъемных силовых установок летательного аппарата, а также невозможность использовать внутренние объемы крыла. Перечисленные факторы, наряду с отсутствием средств стабилизации летального аппарата во взлетно-посадочном режиме, снижают функциональные возможности данного летательного аппарата и его эффективность в целом.
Известен «Гибридный вертолет» по патенту ЕР №3141478 В1, МПК В64С 27/26, В64С 39/06, опубл. 07.11.2018, БИ №2018/45, содержащий фюзеляж, несущий винт, создающий подъемную силу, а также пары продольно расположенных маршевых движителей, создающих тягу, и крыльев, жестко закрепленных в горизонтальной плоскости по левому и правому борту фюзеляжа. Крылья создают дополнительную подъемную силу в режиме горизонтального крейсерского полета. Маршевые движители установлены на крыльях и приводятся в движение силовой установкой несущего винта через систему трансмиссии.
Недостатком данного летательного аппарата является наличие несущего винта, создающего подъемную силу не только во взлетно-посадочном режиме, но и в режиме крейсерского полета, что ограничивает скоростные характеристики летательного аппарата, вследствие срыва потока на концевых участках отступающих лопастей несущего винта. Установка маршевых движителей вне зоны затенения несущего винта требует увеличения размаха крыльев, что наряду с использованием трансмиссии для вращения маршевых движителей ведет к усложнению конструкции, увеличению веса, снижению надежности и безопасности, что в целом снижает эффективность данного летательного аппарата.
Наиболее близким по технической сущности и взятым в качестве прототипа является «Аэромеханический способ управления конфигурацией и режимом полета конвертируемого летательного аппарата (конвертоплана)» по патенту RU №2700323 С2, МПК В64С 37/00 опубл. 16.09.2019 БИ №26.
Конвертоплан имеет фюзеляж, два крыла, четыре двигателя, оперение, шасси. Крылья имеют шарнирное крепление к фюзеляжу и могут поворачиваться вокруг осей перпендикулярных строительной оси фюзеляжа и направлению полета. Двигатели имеют вынос на пилонах относительно оси поворота крыльев передние вперед (вниз), задние соответственно назад (вверх). Валы вращения передней и задней пары двигателей кинематически жестко связаны посредством тяги и качалок и имеют возможность поворачиваться только синхронно.
Для изменения угла наклона двигателей используют аэромеханический способ, заключающийся в использовании неуравновешенного момента от тяги двигателей.
В режиме вертикального взлета и посадки стабилизация и управление конвертопланом осуществляют изменением оборотов каждого двигателя. Для перехода в режим разгона увеличивают тягу задних двигателей, в результате формируют неуравновешенный момент относительно шарнирного крепления заднего крыла, который передается через рычаги и тягу на ось вращения переднего крыла, вся система начинает поворот, формируя горизонтальную составляющую тяги двигателей, обеспечивая разгон конвертоплана.
Выход из режима горизонтального полета осуществляют путем увеличения тяги на передние двигатели, при этом формируют неуравновешенный момент от тяги двигателей, стремящийся повернуть всю систему двигателей к взлетному положению, поворотные крылья поворачивают на увеличение углов атаки, создавая большое аэродинамическое сопротивление, и обеспечивают формирование аэродинамического тормоза.
Основным недостатком указанного конвертируемого летательного аппарата (конвертоплана) является сложность и увеличение массы конструкции фюзеляжа, обусловленная наличием второго крыла, а также системы тяг и качалок, кинематически связывающих переднюю и заднюю пары двигателей. Наличие второго крыла требует ведения в конструкцию фюзеляжа дополнительных силовых элементов, необходимых для его установки, что увеличивает массу летательного аппарата. Обеспечение требуемой прочности и долговечности системы тяг и качалок также ведет к увеличению их массы, поскольку эти элементы на протяжении всего полета воспринимают нагрузки от шарнирных моментов передней и задней пар двигателей.
Также к недостаткам данного аппарата следует отнести снижение его аэродинамических характеристик вследствие увеличения сопротивления аппарата и затенения заднего крыла.
Увеличение массы конструкции, наряду с ухудшением аэродинамических характеристик, при прочих равных условиях снижает продолжительность полета, что в целом ведет к снижению эффективности летательного аппарата вертикального взлета и посадки.
Решаемой задачей предлагаемого изобретения является создание простого и надежного летательного аппарата вертикального взлета и посадки и аэромеханического способа управления поворотом его подъемно-маршевых силовых установок за счет отказа от механических приводов поворота подъемно-маршевых силовых установок, что позволит повысить надежность, уменьшить массу конструкции летательного аппарата и повысить его аэродинамические характеристики, что в совокупности с введенными поворотными хвостовыми винтами позволит увеличить скорость, продолжительность полета и эффективность летательного аппарата в целом.
Техническим результатом изобретения является создание эффективного летательного аппарата вертикального взлета и посадки и аэромеханического способа управления поворотом его подъемно-маршевых силовых установок путем увеличения скорости, продолжительности полета и надежности летательного аппарата за счет упрощения и уменьшения массы конструкции и улучшения аэродинамических характеристик.
Технический результат достигается тем, что в конструкцию летательного аппарата вертикального взлета и посадки, включающую фюзеляж, шасси, крыло с элеронами, на концах которого расположены подъемно-маршевые силовые установки, каждая из которых состоит из силовой рамы, жестко соединенной с осью, проходящей вдоль крыла, а также подъемно-маршевого двигателя, редуктора, подъемно-маршевого винта и его автомата перекоса, как минимум двух сервоприводов автомата перекоса, червяка и его привода, размещенных на раме и закрытых капотом, отличающегося тем, что крыло жестко закреплено на фюзеляже, а подъемно-маршевые силовые установки выполнены с возможностью поворота в опорах, установленных на силовых элементах крыла, при этом червячные пары силовых установок расположены на концах крыла и выполнены в виде сектора, который жестко закреплен на крыле, а червяк с электродвигателем жестко закреплен на силовой раме и фиксирует подъемно-маршевую силовую установку как в крайних положениях (вертикальном и горизонтальном), так и, при необходимости, в любом из промежуточных положений, при этом карданный узел, соединяющий оси правой и левой подъемно-маршевой силовой установки соответственно, расположен в корневой части крыла и обеспечивает синхронность поворота правой и левой подъемно-маршевой силовой установки, кроме того в конструкцию введены хвостовые винты, которые выполнены в виде блока, который состоит из двух силовых рам, жестко соединенными между собой осью, с установленными на них кольцевыми обтекателями, электродвигателями, хвостовыми винтами и их автоматами перекоса, сервоприводами автоматов перекоса, при этом блок расположен в хвостовой части фюзеляжа, перпендикулярно его продольной оси X и имеет возможность поворота в опорах, установленных на силовых элементах фюзеляжа под действием сервопривода.
Кроме того применен аэромеханический способ управления поворотом подъемно-маршевых силовых установок, заключающийся в создании неуравновешенного момента от силы тяги подъемно-маршевых винтов, отличающийся тем, что вводят две подъемно-маршевые силовые установки и блок хвостовых винтов, состоящий их двух хвостовых винтов, оси вращения которых в режиме вертикального взлета и посадки перпендикулярны продольной оси X летательного аппарата, при этом подъемно-маршевые винты создают подъемную силу, а высоту полета летательного аппарата изменяют путем синхронного изменения тяги правого и левого подъемно-маршевых винтов, для чего изменяют на равные величины общий шаг автоматов перекоса правого и левого подъемно-маршевых винтов, причем стабилизацию и управление летательным аппаратом по тангажу в режиме вертикального взлета и посадки осуществляют изменением тяги хвостовых винтов, для чего изменяют общий шаг автоматов перекоса хвостовых винтов, причем стабилизацию и управление в режиме вертикального взлета и посадки осуществляют путем дифференциального изменения тяги правого и левого подъемно-маршевых винтов, для чего изменяют общий шаг автоматов перекоса правого и левого подъемно-маршевых винтов на разные величины, кроме того управление летательным аппаратом по курсу в режиме вертикального взлета и посадки осуществляют дифференциальным изменением продольного циклического шага правого и левого подъемно-маршевых винтов, для чего изменяют продольный циклический шаг автоматов перекоса правого и левого подъемно-маршевых винтов на разные величины, далее после набора заданной высоты, в переходном режиме изменяют продольный циклический шаг подъемно-маршевых винтов, при этом наклоняют автоматы перекоса подъемно-маршевых винтов относительно поперечной оси Ζ летательного аппарата, и отклоняют вектор силы тяги подъемно-маршевых винтов, создавая плечо силы тяги относительно оси навески подъемно-маршевых винтов, в результате чего получают неуравновешенный момент относительно оси навески, который поворачивает подъемно-маршевые силовые установки.
Новизна:
Предлагаемое техническое решение позволяет получить более эффективный летательный аппарат вертикального взлета и посадки и аэромеханический способ управления поворотом его подъемно-маршевых силовых установок, а именно повысить продолжительность полета летательного аппарата, за счет снижения массы конструкции, а также повысить его надежность, так как отсутствуют силовые приводы и механизмы, необходимые для поворота подъемно-маршевых силовых установок, что исключает вероятность отказа этих элементов. При этом благодаря введению в конструкцию поворотных хвостовых винтов, увеличивается скорость полета летательного аппарата за счет дополнительной тяги, которую создают хвостовые винты в режиме горизонтального крейсерского полета и, кроме того, повышается надежность и безопасность летательного аппарата за счет простоты управления и более эффективной стабилизации летательного аппарата в режиме висения, которую обеспечивают поворотные хвостовые винты.
Для пояснения технической сущности рассмотрим чертежи, где:
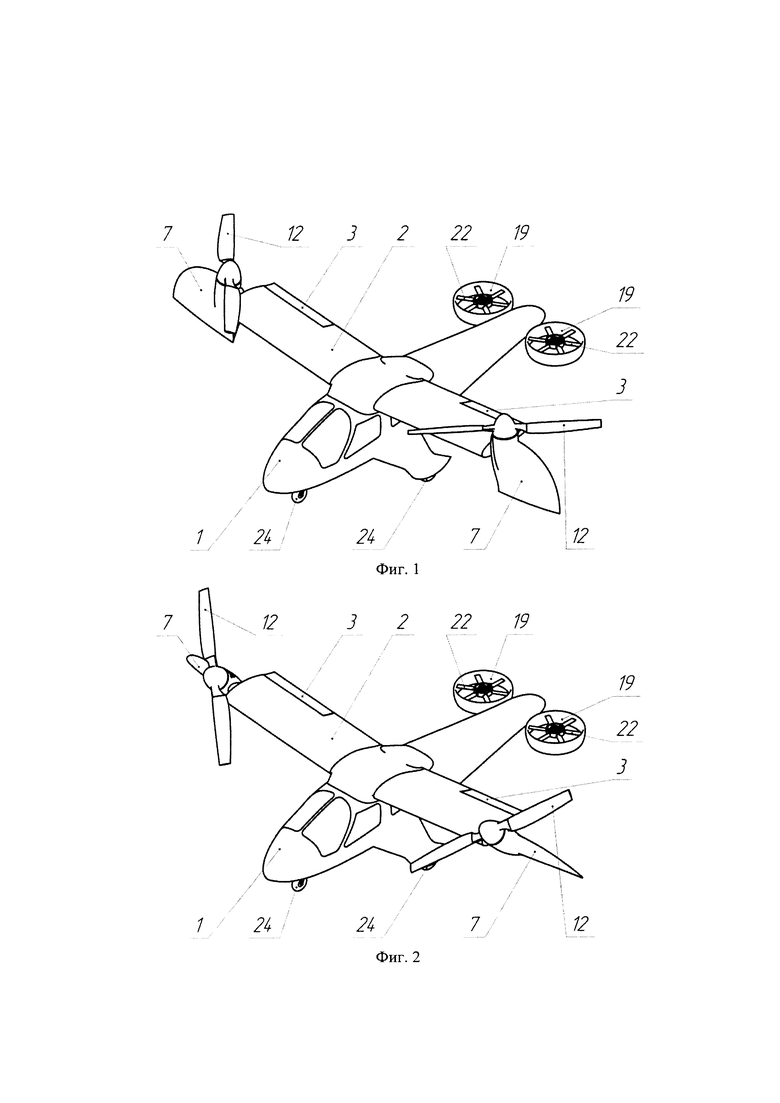
фиг. 1 - Летательный аппарат вертикального взлета и посадки в режиме вертикального взлета и посадки - общий вид в изометрии;
фиг. 2 - Летательный аппарат вертикального взлета и посадки в переходном режиме - общий вид в изометрии;
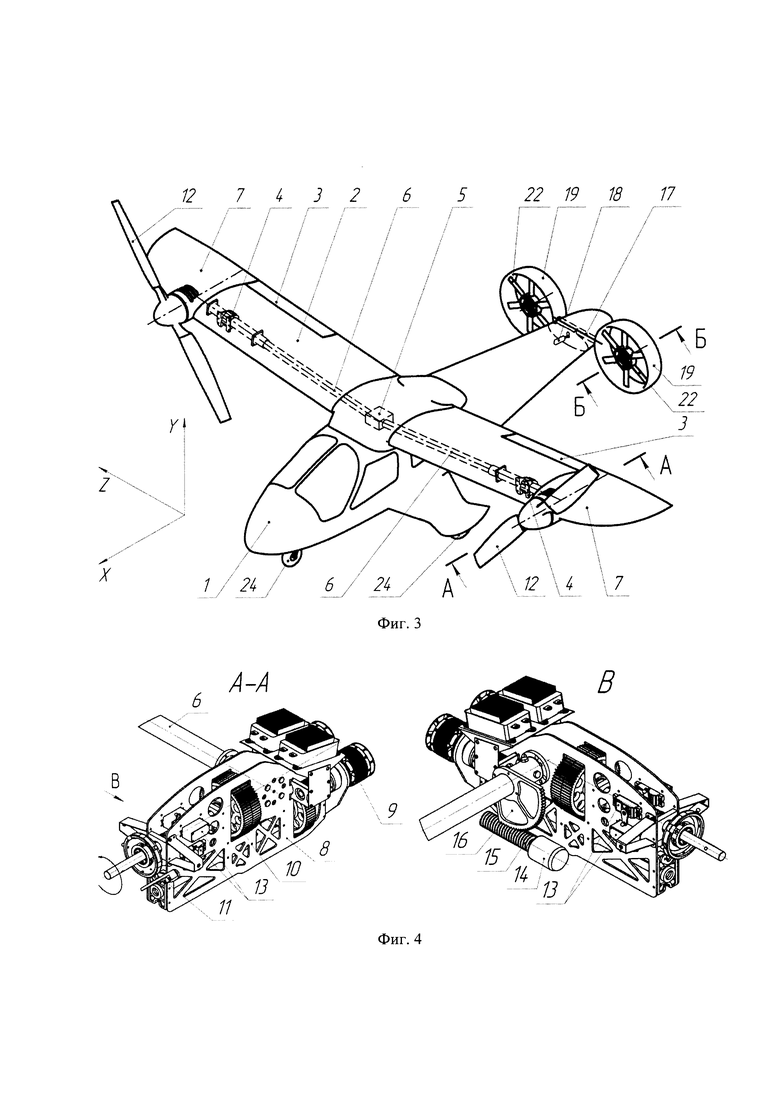
фиг. 3 - Летательный аппарат вертикального взлета и посадки в крейсерском режиме - общий вид в изометрии;
фиг. 4 - Разрез А-А (подъемно-маршевая силовая установка);
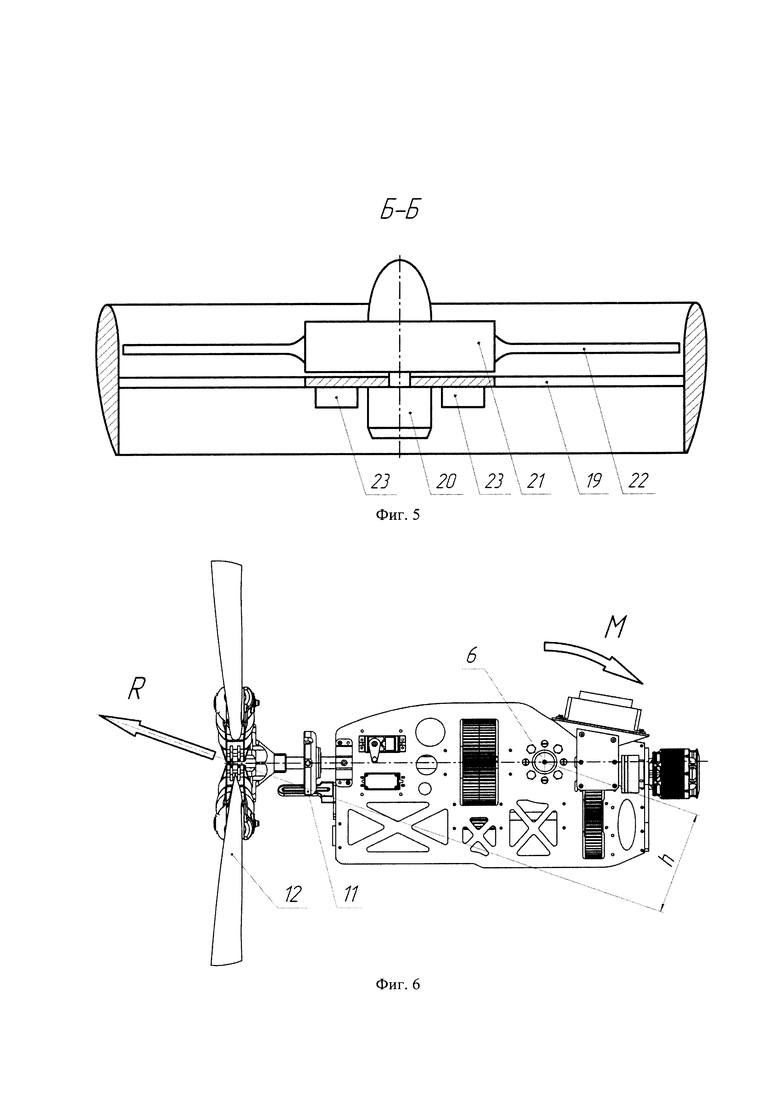
фиг. 5 - Разрез Б-Б (хвостовой винт);
фиг. 6 - Кинематическая схема способа аэромеханического поворота подъемно-маршевых силовых установок, где:
1 - фюзеляж
2 - крыло
3 - элероны
4 - опора
5 - карданный узел
6 - ось навески (ось вращения) подъемно-маршевой силовой установки
7 - капот
8 - силовая рама
9 - подъемно-маршевый двигатель (подъемно-маршевая силовая установка)
10 - редуктор
11 - автомат перекоса подъемно-маршевого винта
12 - подъемно-маршевый винт
13 - сервопривод автомата перекоса подъемно-маршевого винта
14 - электродвигатель (привод червяка)
15 - червяк
16 - сектор
17 - ось навески блока хвостовых винтов
18 - сервопривод блока хвостовых винтов
19 - силовая рама с обтекателем
20 - электродвигатель (привод хвостового винта)
21 - автомат перекоса хвостового винта
22 - хвостовой винт
23 - сервопривод автомата перекоса хвостового винта
24 - шасси
R - сила тяги подъемно-маршевого винта
h - плечо силы тяги относительно оси 6
Μ=R × h- момент силы тяги относительно оси 6
ЛА ВВП содержит фюзеляж 1 с жестко закрепленным на нем крылом 2 с элеронами 3. Внутри крыла 2 на элементах его силового набора закреплены опоры 4, служащие для установки осей навески 6 правой и левой подъемно-маршевых силовых установок и обеспечивающие возможность поворота осей 6. Оси навески 6 правой и левой подъемно-маршевых силовых установок соединяются между собой при помощи карданного узла 5, находящего в плоскости симметрии летательного аппарата и закрепленного на элементах силового набора крыла 2. Подъемно-маршевая силовая установка состоит из силовой рамы 8, жестко соединенной с осью навески 6. На раме 8, установлен подъемно-маршевый двигатель 9, вращающий редуктор 10 на выходном валу которого расположен подъемно-маршевый винт изменяемого шага 12. Изменение угла установки лопастей подъемно-маршевого винта 12 осуществляется при помощи автомата перекоса 11, также установленного на выходном валу редуктора 10. На силовой раме 8 установлены два сервопривода 13, один из которых служит для перемещения автомата перекоса 11 вдоль выходного вала редуктора 10, а второй - для поворота внешнего кольца автомата перекоса 11 относительно поперечной оси Ζ летательного аппарата. Червяк 15 и вращающий его электродвигатель 14 расположены на раме 8 вблизи торцевой нервюры крыла 2. Червяк 15 входит в зацепление с сектором 16, жестко закрепленным на торцевой нервюре крыла 2. Снаружи подъемно-маршевая силовая установка закрывается капотом 7, служащим для придания летательному аппарату удобообтекаемой формы и защиты силовой установки от негативного воздействия окружающей среды.
Правая и левая подъемно-маршевые силовые установки имеют одинаковый состав и скомпонованы зеркально относительно плоскости симметрии летательного аппарата.
В хвостовой части фюзеляжа 1 на элементах его силового набора закреплены опоры 4, служащие для установки оси навески 17 блока хвостовых винтов и обеспечивающие возможность поворота оси 17. Поворот блока хвостовых винтов осуществляется при помощи сервопривода 18, неподвижная часть которого закреплена на элементах его силового набора фюзеляжа 1, а подвижная часть шарнирно соединена с осью навески 17. Блок хвостовых винтов состоит из двух (правой и левой) кольцевых силовых рам с профилированным обтекателем 19 жестко соединенных между собой осью навески 17. На раме 17 установлен электродвигатель 20, вращающий хвостовой винт изменяемого шага 22, расположенный на выходном валу электродвигателя 20. Изменение угла установки лопастей хвостового винта 22 осуществляется при помощи автомата перекоса 21, также установленного на выходном валу электродвигателя 20. На силовой раме 19 установлен сервопривод 23, который служит для перемещения автомата перекоса 11 вдоль выходного электродвигателя 20. Лопасти хвостового винта 22 имеют симметричный профиль поперечного сечения, и могут иметь как положительные, так и отрицательные углы установки.
Стоянка и перемещение летательного аппарата по аэродрому обеспечивается при помощи трехопорного шасси 24, включающего носовую опору и две основные опоры.
Заявляемое устройство работает следующим образом:
Перед началом полета летательный аппарат находится в режиме вертикального взлета и посадки. В режиме вертикального взлета и посадки, подъемно-маршевые силовые установки и блок хвостовых винтов находятся в вертикальном положении, при котором оси вращения подъемно-маршевых винтов 12 и хвостовых винтов 22 перпендикулярны продольной оси X летательного аппарата. В режиме вертикального взлета и посадки подъемная сила создается подъемно-маршевыми винтами 12. Изменение высоты полета летательного аппарата в режиме вертикального взлета и посадки осуществляют путем синхронного изменения тяги правого и левого подъемно-маршевых винтов 12 (изменения общего шага правого и левого подъемно-маршевых винтов 12 при помощи автоматов перекоса И на равные величины). Стабилизацию и управление летательным аппаратом по тангажу в режиме вертикального взлета и посадки осуществляют путем изменения тяги хвостовых винтов 22 (изменения общего шага хвостовых винтов 22 при помощи автоматов перекоса 21). Стабилизацию и управление летательным аппаратом по крену в режиме вертикального взлета и посадки осуществляют путем дифференциального изменения тяги правого и левого подъемно-маршевых винтов 12 (изменения общего шага правого и левого подъемно-маршевых винтов 12 при помощи автоматов перекоса 11 на разные величины). Управление летательным аппаратом по курсу в режиме вертикального взлета и посадки осуществляют путем дифференциального изменения продольного циклического шага правого и левого подъемно-маршевых винтов 12 (изменения продольного циклического шага правого и левого подъемно-маршевых винтов 12 при помощи автоматов перекоса 11 на разные величины).
После набора заданной высоты, летательный аппарат переходит в переходный режим полета. В переходном режиме, изменяют продольный циклический шаг подъемно-маршевых винтов 12, наклоняя автоматы перекоса 11 подъемно-маршевых винтов 12 относительно поперечной оси Ζ летательного аппарата, и, тем самым, отклоняют вектор R силы тяги подъемно-маршевых винтов 12, что создает плечо h силы тяги подъемно-маршевых винтов 12 относительно оси 6. В результате создается неуравновешенный момент Μ относительно оси 6, который стремится повернуть подъемно-маршевые силовые установки. Одновременно с отклонением автоматов перекоса 11 подъемно-маршевых винтов 12, включают электродвигатель 14, вращающий червяк 15. Перемещение червяка 15 относительно сектора 16 позволяет подъемно-маршевой силовой установке повернуться относительно оси 6 под действием неуравновешенного момента Μ и, одновременно, ограничивает угловую скорость поворота подъемно-маршевой силовой установки, исключая возможное неустойчивое движение летательного аппарата вследствие излишне быстрого поворота подъемно-маршевых силовых установок. Одновременно с поворотом подъемно-маршевых силовых установок, привод 18 поворачивает блок хвостовых винтов. В переходном режиме до достижения летательным аппаратом скорости, достаточной для удержания его в воздухе только подъемной силой, создаваемой крылом 2, подъемная сила создается подъемно-маршевыми винтами 12 совместно с крылом 2.
Стабилизацию и управление летательным аппаратом по тангажу в переходном режиме осуществляют путем отклонения блока хвостовых винтов при помощи привода 18 совместно с изменением тяги хвостовых винтов 22 (изменением общего шага хвостовых винтов 22 при помощи автоматов перекоса 21). Стабилизацию и управление летательным аппаратом по крену и курсу в переходном режиме осуществляют путем дифференциального изменения тяги правого и левого подъемно-маршевых винтов 12 (изменения общего шага правого и левого подъемно-маршевых винтов 12 при помощи автоматов перекоса 11 на разные величины).
После того как летательный аппарат набрал скорость, при которой крыло 2 обеспечивает создание подъемной силы, достаточной для поддержания аппарата в воздухе, он переходит в режим крейсерского полета. В режиме крейсерского полета подъемно-маршевые силовые установки и блок хвостовых винтов приводят в горизонтальное положение, при котором оси вращения подъемно-маршевых винтов 12 и хвостовых винтов 22 параллельны продольной оси X летательного аппарата. В режиме крейсерского полета управление летательным аппаратом по тангажу осуществляют путем отклонения блока хвостовых винтов от горизонтали при помощи привода 18 совместно с изменением тяги хвостовых винтов 22 (изменением общего шага хвостовых винтов 22 при помощи автоматов перекоса 21). Управление по курсу осуществляют путем дифференциального изменения тяги правого и левого подъемно-маршевых винтов 12 (изменения общего шага правого и левого подъемно-маршевых винтов 12 при помощи автоматов перекоса 11 на разные величины). Управление по крену осуществляют при помощи элеронов 3, расположенных на концевых участках крыла 2.
При необходимости набора высоты по вертикальной траектории или зависания в воздухе (например, для аэрофотосъемки или наблюдения), выполняют переход из крейсерского режима в переходный режим, а затем в режим вертикального взлета и посадки. Аналогичную процедуру выполняют при посадке летательного аппарата.
По своим технико-экономическим преимуществам, по сравнению с известными аналогами, предлагаемое изобретение позволяет создать эффективный, т.е. надежный и обладающий более высокими показателями скорости и продолжительности полета, летательный аппарат вертикального взлета и посадки.
Продолжительность полета летательного аппарата увеличивается благодаря снижению массы конструкции летательного аппарата, в которой отсутствуют силовые приводы и механизмы, необходимые для поворота подъемно-маршевых силовых установок, и взамен которых используется способ аэромеханического поворота.
Скорость полета летательного аппарата увеличивается за счет дополнительной тяги, которую создают хвостовые винты в режиме горизонтального крейсерского полета.
Надежность и безопасность летательного аппарата повышаются за счет простоты управления и более эффективной стабилизации летательного аппарата в режиме висения, которую обеспечивают поворотные хвостовые винты. Надежность летательного аппарата также обеспечивается за счет простой конструкции узлов поворота подъемно-маршевых силовых установок, поскольку в ней отсутствуют силовые приводы, необходимые для поворота подъемно-маршевых силовых установок, и, соответственно, исключается вероятность отказа этих элементов.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНВЕРТОПЛАН | 2016 |
|
RU2635431C1 |
| БПЛА и способ управления БПЛА | 2024 |
|
RU2831546C1 |
| Конвертоплан | 2018 |
|
RU2682756C1 |
| МАЛОРАЗМЕРНЫЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТОЛЕТНОГО ТИПА | 2023 |
|
RU2802879C1 |
| Летательный аппарат вертикального взлета и посадки | 2018 |
|
RU2700154C1 |
| ЛЕГКИЙ МНОГОРЕЖИМНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2007 |
|
RU2348568C1 |
| КОНВЕРТОЛЕТ | 2008 |
|
RU2369525C2 |
| КОНВЕРТОПЛАН С РЕАКТИВНЫМ ПРИВОДОМ РОТОРОВ, УПРАВЛЯЕМЫЙ РОТОРАМИ ПОСРЕДСТВОМ АВТОМАТОВ ПЕРЕКОСА ЧЕРЕЗ РЫЧАГИ УПРАВЛЕНИЯ, НЕ ТРЕБУЮЩИЙ ДОПОЛНИТЕЛЬНЫХ СРЕДСТВ УПРАВЛЕНИЯ | 2013 |
|
RU2570241C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2024 |
|
RU2840912C1 |
| Самолет вертикального взлета и посадки | 2020 |
|
RU2738746C1 |
Изобретение относится к области авиационной техники, а именно к конструкциям и аэромеханическим способам управления летательными аппаратами вертикального взлета и посадки. Летательный аппарат вертикального взлета и посадки включает фюзеляж (1), шасси (24), крыло (2) с элеронами (3), на концах которого расположены подъемно-маршевые силовые установки, хвостовые винты. Силовая установка состоит из силовой рамы (8), жестко соединенной с осью (6), проходящей вдоль крыла (2), подъемно-маршевого двигателя (9), редуктора (10), подъемно-маршевого винта (12), автомата перекоса (11), сервоприводов (13) автомата перекоса (11), червяка (15) и его привода (14), размещенных на раме (8) и закрытых капотом (7). Крыло (2) жестко закреплено на фюзеляже (1), а подъемно-маршевые силовые установки выполнены с возможностью поворота в опорах (4), установленных на крыле (2). Червячные пары силовых установок расположены на концах крыла (2) и выполнены в виде сектора (16), который жестко закреплен на крыле (2), и червяка (15) с электродвигателем (14), жестко закрепленным на силовой раме (8) с возможностью фиксации подъемно-маршевой силовой установки в крайних и промежуточных положениях. Обеспечивается увеличение скорости, продолжительности полета и повышение надежности летательного аппарата. 2 н.п. ф-лы, 6 ил.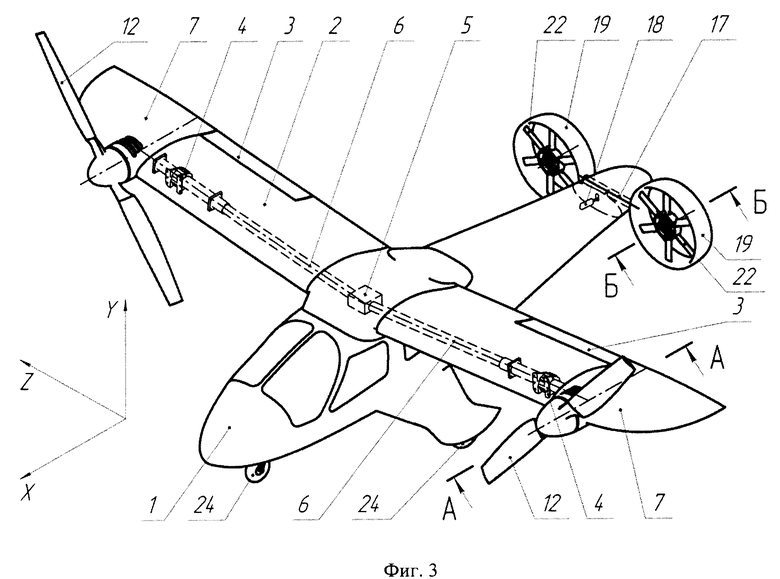
1. Летательный аппарат вертикального взлета и посадки, включающий фюзеляж, шасси, крыло с элеронами, на концах которого расположены подъемно-маршевые силовые установки, каждая из которых состоит из силовой рамы, жестко соединенной с осью, проходящей вдоль крыла, а также подъемно-маршевого двигателя, редуктора, подъемно-маршевого винта и его автомата перекоса, как минимум двух сервоприводов автомата перекоса, червяка и его привода, размещенных на раме и закрытых капотом, отличающийся тем, что крыло жестко закреплено на фюзеляже, а подъемно-маршевые силовые установки выполнены с возможностью поворота в опорах, установленных на силовых элементах крыла, при этом червячные пары силовых установок расположены на концах крыла и выполнены в виде сектора, который жестко закреплен на крыле, причем червяк с электродвигателем жестко закреплен на силовой раме с возможностью фиксирования подъемно-маршевой силовой установки, как в крайних положениях (вертикальном и горизонтальном), так и, при необходимости, в любом из промежуточных положений, при этом карданный узел, соединяющий оси правой и левой подъемно-маршевых силовых установок соответственно, расположен в корневой части крыла для обеспечения синхронности поворота правой и левой подъемно-маршевых силовых установок, кроме того, в конструкцию введены хвостовые винты и выполнены в виде блока, который состоит из двух силовых рам, жестко соединенных между собой осью, с установленными на них кольцевыми обтекателями, электродвигателями, хвостовыми винтами и их автоматами перекоса, сервоприводами автоматов перекоса, при этом блок расположен в хвостовой части фюзеляжа, перпендикулярно его продольной оси X с возможностью поворота в опорах, установленных на силовых элементах фюзеляжа под действием сервопривода.
2. Аэромеханический способ управления поворотом подъемно-маршевых силовых установок, заключающийся в создании неуравновешенного момента от силы тяги подъемно-маршевых винтов, отличающийся тем, что вводят две подъемно-маршевые силовые установки и блок хвостовых винтов, состоящий их двух хвостовых винтов, оси вращения которых в режиме вертикального взлета и посадки перпендикулярны продольной оси X летательного аппарата, при этом подъемно-маршевые винты создают подъемную силу, а высоту полета летательного аппарата изменяют путем синхронного изменения тяги правого и левого подъемно-маршевых винтов, для чего изменяют на равные величины общий шаг автоматов перекоса правого и левого подъемно-маршевых винтов, причем стабилизацию и управление летательным аппаратом по тангажу в режиме вертикального взлета и посадки осуществляют изменением тяги хвостовых винтов, для чего изменяют общий шаг автоматов перекоса хвостовых винтов, причем стабилизацию и управление в режиме вертикального взлета и посадки осуществляют путем дифференциального изменения тяги правого и левого подъемно-маршевых винтов, для чего изменяют общий шаг автоматов перекоса правого и левого подъемно-маршевых винтов на разные величины, кроме того, управление летательным аппаратом по курсу в режиме вертикального взлета и посадки осуществляют дифференциальным изменением продольного циклического шага правого и левого подъемно-маршевых винтов, для чего изменяют продольный циклический шаг автоматов перекоса правого и левого подъемно-маршевых винтов на разные величины, далее после набора заданной высоты, в переходном режиме изменяют продольный циклический шаг подъемно-маршевых винтов, при этом наклоняют автоматы перекоса подъемно-маршевых винтов относительно поперечной оси Ζ летательного аппарата, и отклоняют вектор силы тяги подъемно-маршевых винтов, создавая плечо силы тяги относительно оси навески подъемно-маршевых винтов, в результате чего получают неуравновешенный момент относительно оси навески, который поворачивает подъемно-маршевые силовые установки.
| Аэромеханический способ управления конфигурацией и режимом полета конвертируемого летательного аппарата (конвертоплана) | 2017 |
|
RU2700323C2 |
| RU 152807 U1, 20.06.2015 | |||
| WO 2017200609 A1, 23.11.2017 | |||
| US 9139298 B2, 22.09.2015 | |||
| ВЫПОЛНЕННЫЙ С ВОЗМОЖНОСТЬЮ ВЕРТИКАЛЬНОГО ВЗЛЕТА ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2014 |
|
RU2670356C2 |

