Изобретение относится к неразрушающему контролю технического состояния рельсовых путей.
Известен акустический способ обнаружения неисправности рельсового пути в процессе движения состава по железной дороге, при котором в рельсы передают акустический сигнал, принимают отраженный сигнал, а по времени распространения акустических сигналов к месту неисправности и обратно определяют его координату, сигналы передают и принимают посредством пьезоэлектрических преобразователей (ПЭП), установленных на подшипниках скольжения, соосно закрепленных на валу колесной пары, при этом передачу и прием акустических сигналов осуществляют попеременно (RU 2126339, В61К9/10, 20.02.1999).
Известный способ реализуется устройством для обнаружения неисправности рельсового пути, содержащим передающий и приемный преобразователи, размещенные внутри кожухов, закрепленных на внешней поверхности подшипников, надетых на вал колесной пары. Зазор между внутренней поверхностью подшипников и поверхностью вала колесной пары заполнен иммерсионной жидкостью, предназначенной для создания акустического контакта между пьезопластиной ПЭП и колесной парой. В точках соприкосновения колес с рельсами происходит передача акустической энергии в рельсы, а также прием отраженных от дефектов рельсового пути сигналов. Передающий ПЭП связан с генератором электрических колебаний ультразвуковой частоты, а приемный ПЭП – с системой обработки сигналов.
Основной недостаток известного способа заключается в сложности реализации операции передачи посредством пьезоэлектрических преобразователей в рельсы акустического воздействия достаточной мощности, необходимой для мониторинга состояния рельс на требуемой протяженности измерительной зоны, которая не должна быть меньше 200-метрового отрезка пути. Непосредственный контакт пьезопластины ПЭП с рельсом через тонкий слой акустической смазки, что было бы наиболее выгодно энергетически при движении состава, реализовать сложно. При этом передача и прием акустических колебаний через относительно толстый слой иммерсионной жидкости связаны со значительными потерями акустической энергии и необходимостью использования специальных уплотнительных элементов. Этот недостаток усугубляет малая площадь контакта «колесо-рельс». Также загрязненная поверхность рельса является дополнительным фактором, ухудшающим передачу энергии звуковых колебаний. Возможность передачи акустических колебаний от неподвижной к подвижной части акустического тракта (и, наоборот, при приеме отраженного акустического сигнала), обеспечивают посредством следующей цепочки: пьезопластина ПЭП – протектор-подшипник скольжения – слой иммерсионной жидкости – вал колесной пары. Такая технология, составляющая основу передачи и приёма акустических сигналов, чрезмерно усложняет конструкцию устройства, реализующего известный способ.
Известен акустический способ обнаружения неисправности рельсового пути, в котором в рельсы передают акустический сигнал, принимают отраженный сигнал, а по времени распространения акустических сигналов к месту неисправности и обратно определяют его координату, отраженный сигнал принимают пьезоэлектрическими преобразователями (ПЭП), установленными на подшипниках скольжения, расположенными на валу колесной пары, передачу и прием акустических сигналов осуществляют попеременно, при этом в качестве источника мощности акустических сигналов используют удары колесных пар на стыках межрельсового пути, стабилизируют импульсы постоянным весом локомотива в рабочем диапазоне его скоростей под углом наката α=0,001÷0,002°, регистрируют одновременно частоту следования сформированных ударных импульсов, фоновую интенсивность и частотный спектр акустического шума в интервале между первым и вторым ударными импульсами и отраженными сигналами от не менее 2-х колесных пар, преобразуя сформированные ударные импульсы в импульсы прямоугольной формы, определяют их длительность между временами заднего фронта и переднего фронта, разлагая прямоугольные импульсы с правой и левой колеи в ряд Фурье и выделяют основную гармонику правой и левой колеи, после чего проводят дальнейшую обработку полученных данных, определяя неисправности рельсового пути (RU 2511644, G01N29/04, В61К9/10, 10.04.2014).
В известном способе в качестве источника мощности акустических сигналов, получаемого попутно и «даром», используют энергию, выделяемую при ударном взаимодействии колесных пар с рельсовыми стыками. Прием отраженных от дефектных участков рельсового пути сигналов осуществляют пьезоэлектрическими преобразователями (ПЭП), установленными на подшипниках скольжения, расположенных на валу колесной пары.
Способ позволяет более эффективно передавать энергию акустических колебаний в рельсы, обеспечивая возможность их приёма на более больших расстояниях. Однако в приемном канале недостатки, обусловленные малой площадью контакта «рельс-колесо» и применением иммерсионной жидкости, через которую отраженный сигнал передается на пьезопластину ПЭП, не устранены, что снижает надежность обнаружения дефектов пути. Относительно низкая надежность способа обусловлена также тем, что излучение и прием сигналов производят по принципу «от стыка к стыку». В этом случае сигнал, отражённый от дефекта, находящегося на расстоянии от состава порядка нескольких километров бесстыкового участка пути, принимается практически мгновенно (скорость распространения звука в стальном рельсе составляет около 6000 м/с). Но сам подвижной состав проходит это расстояние за определенное время, в течение которого обстановка на пути может измениться (например, на рельсах может появиться посторонний предмет и т.п.). Поскольку в известном способе в качестве источника акустического сигнала используют удар колесной пары на рельсовом стыке, использовать известный способ можно лишь на стыковых (звеньевых) рельсовых путях. На бесстыковом рельсовом пути (или на бесстыковом участке пути длиной в перегон) его использование не представляется возможным. Это существенно ограничивает область его применения.
Известен способ мониторинга технического состояния рельсового пути, при котором в рельсы передают акустический сигнал, отраженный сигнал принимают акустическими датчиками, обрабатывают сигнал с помощью системы обработки сигналов и по результатам анализа полученных данных судят о состоянии рельсового пути, отличающийся тем, что в качестве источника акустического сигнала используют деформационную волну, возникающую в рельсе при движении подвижного состава, при этом прием отраженных сигналов осуществляют непрерывно в движении состава, а в качестве акустических датчиков используют электромагнитно-акустические преобразователи (ЭМАП) (RU 2636827, В61К9/10, G01N27/90, G01N29/04, 28.11.2017).
Наличие ЭМАП в сочетании с использованием в качестве источника акустического сигнала подвижного состава, деформирующего рельс в процессе движения, обеспечивает надежное функционирование системы мониторинга в условиях, как звеньевого, так и бесстыкового рельсовых путей. Бесконтактный, непрерывный прием и анализ отраженных от дефектов пути акустических сигналов в процессе движения подвижного состава позволяет оперативно, с большим опережением, оценивать обстановку на путях и принимать корректирующие действия, исключающие аварийные ситуации.
Система мониторинга, реализующая известный способ, установлена на подвижном составе, предпочтительно на локомотиве, и содержит акустические датчики, выполненные в виде электромагнитно-акустических преобразователей (ЭМАП), связанных с системой обработки сигналов. Сам ЭМАП, закрепленный на ходовой части тележки локомотива, включает магнитную систему в виде постоянного магнита и приемную катушку, установленную с зазором относительно верхней поверхности рельса. Минимальная величина зазора определяется конструктивными особенностями системы и условиями эксплуатации, а максимальная – необходимой чувствительностью датчика. Система обработки сигналов включает усилитель, вход которого соединен с ЭМАП, а выход через фильтр низких частот подключен к аналого-цифровому преобразователю (АЦП), выход которого через последовательно соединенные полосовой фильтр, блок быстрого преобразования Фурье (БПФ) и пороговое устройство подключен к устройству отображения информации.
При движении подвижного состава в рельсе возникает деформационная волна, являющаяся источником акустических колебаний. Она распространяется в направлении движения состава со скоростью 6000м/с. Встречая излом рельса волна практически полностью отражается. Она отражается частично, когда на её пути появляется препятствие в виде неоднородности рельса, вызванной коррозией, трещинообразованием или соприкосновением с рельсами колесных пар другого подвижного состава. Отраженный акустический сигнал, несущий информацию о возможном дефекте пути, распространяясь по рельсу в обратном направлении, навстречу движущемуся составу, достигает ЭМАП. При взаимодействии акустических колебаний материала рельса с магнитным полем магнитной системы в рельсе наводятся вихревые токи, которые, в свою очередь, индуцируют электродвижущую силу (ЭДС) в приемной катушке ЭМАП. Далее восстановленный эквивалентный электрический сигнал с выхода приемной катушки поступает на вход системы обработки сигналов, где его усиливают и преобразуют в цифровую форму с помощью АЦП. Сигнал в цифровой форме с выхода АЦП через полосовой фильтр поступает на вход блока быстрого преобразования Фурье (БПФ), который может быть выполнен в виде специализированного процессора. На выходе БПФ получают амплитудно-частотную характеристику (АЧХ) спектра измеренного сигнала. При превышении допустимых пороговых значений сигналов, отражающих особенности проявления определенных типов дефектов рельсов, сигналы поступают на вход устройства отображения информации. Использование для мониторинга технического состояния рельсовых путей однонаправленных ЭМА-преобразователей, позволяет выявлять дефекты, как звеньевого, так и бесстыкового рельсового пути. Расстояние от неоднородности определяют, зная скорость движения поезда и время прихода отраженного сигнала. Знание расстояния позволяет вычислить время сближения подвижного состава с потенциально опасным участком пути. При этом бесконтактный и непрерывный прием и анализ акустических сигналов в процессе движения подвижного состава позволяет исключить характерные для аналогов «мертвые зоны», остающиеся вне «поля зрения» системы мониторинга в режиме реального времени.
Недостаток известного способа заключается в том, что в нём в качестве источника акустического воздействия на рельс используют сам подвижный состав (ПС). В результате этого исключается возможность заблаговременного мониторинга технического состояния рельс на предмет обнаружения изломов и трещин, а сам ПС подвергается опасности аварии или крушения.
Наиболее близким аналогом является способ обнаружения разлома и трещин в рельсах, реализуемый известной системой обнаружения разлома и трещин в рельсах, заключающийся в том, что в рельсы передают сигнал, формируемый в результате проведения серии периодических ударов от калиброванного источника, в качестве которого используют управляемый электромагнитный молоток, отраженный акустический сигнал принимают акустическими датчиками, сравнивают их с эталонным сигналом, по результатам сравнения оценивают состояние рельсового пути, при этом в случае обнаружения разлома или трещины определяют их местоположение (WO 2015178868, B61К9/10; B61L23/04; 26.11.2015).
Система, реализующая известный способ, содержит центр управления и три измерительные группы, установленные на измерительном участке с равным интервалом между ними, каждая из которых включает электромагнитный молоток, акустический датчик, платы управления электромагнитным молотком и акустическим датчиком, волоконно-оптическую коммутационная карту и блок питания, при этом волоконно-оптические коммутационные платы измерительных групп посредством волоконно-оптической линии связи взаимодействуют друг с другом и с центром управления, а также с платами управления электромагнитным молотком и акустическим датчиком своей измерительной группы, акустический датчик каждой измерительной группы расположен в непосредственной близости к месту воздействия на рельс электромагнитного молотка.
Преимущество известного способа состоит в том, что измерения, проводимые для определения излома или трещины в рельсе, могут осуществляться без участия в нанесении ударов на стыках рельс самим ПС. При этом измерения могут производиться и на бесстыковом рельсовом участке железной дороги.
Недостаток известного способа заключается в повышенной мощности формирования акустического сигнала, излучаемого в рельсе. Мощность АС, создаваемых при ударах ЭММ, несравнимо меньше. Поэтому и зона обнаружения излома и трещины рельс существенно меньше.
Технический результат предлагаемого способа заключается в повышении надежности обнаружения трещин и излома в рельсах за счет увеличения помехозащищённости акустических сигналов, формируемых в результате серии периодических ударов по рельсу, задаваемых импульсной последовательностью кода Баркера-13, а также в увеличении зоны измерений.
Технический результат достигается тем, что акустический способ обнаружения излома или трещины в рельсах заключается в том, что в зоне измерения в рельсы передают акустический сигнал, формируемый в результате серии периодических ударов по рельсу от калиброванного источника, в качестве которого используют управляемый электромагнитный молоток, размещенный в центре зоны измерения, акустический сигнал измеряют тремя датчиками, установленными на рельсе, первый из которых установлен в непосредственной близости к электромагнитному молотку, а второй и третий – на концах зоны измерения, осуществляют предварительную обработку измеренных датчиками акустических сигналов путем фильтрации, усиления и аналого-цифрового преобразования с последующей их корреляционной обработкой или согласованной фильтрацией, по результатом которой определяют время задержки приема отраженного сигнала каждым датчиком с последующим анализом их значений, в случае, если отраженный акустический сигнал получен вторым и третьим датчиком одновременно, определяют отсутствии признаков излома или трещины в рельсе на участке измерения, если отраженный сигнал вторым или третьим датчиком не получен, а первый датчик принял отраженный сигнал с временной задержкой, то определяют наличие излома или трещины в рельсе на соответствующем участке зоны измерения, при этом для управления сериями ударов электромагнитного молотка используют импульсную форму представления кода Баркера-13, которую также используют для регистрации процесса воздействия на рельс при корреляционной обработке или согласованной фильтрации предварительно обработанных отраженных сигналов, а расстояние до обнаруженного излома или трещины рассчитывают с учетом скорости распространения акустического сигнала в рельсе и времени задержки приема отраженного акустического сигнала первым датчиком.
Для увеличения длины контролируемого рельса измерения проводят в двух зонах измерения, при этом для управления сериями ударов электромагнитного молотка на второй зоне измерения используют импульсную форму представления инверсного кода Баркера-13, а для измерения отраженного сигнала на одном конце второй зоны измерения используют акустический датчик, установленный на конце первой зоны измерения.
В предлагаемом изобретении в зоне измерений, относящихся к выделенным временным интервалам передачи акустических сигналов, появляющимся в виде импульсных воздействий на рельс от ударов электромеханического молотка (ЭММ) используют в качестве управляющей информации импульсную структуру кода Баркера-13.
Управление импульсных воздействий на рельс с использованием кода Баркера-13 рассредоточивает пакеты ударов электромагнитного молотка (ЭММ) во времени, обеспечивая их структурную взаимосвязь. В результате этого суммарная мощность воздействия на рельс распределяется во времени. Сформированный в результате такого воздействия на рельс акустический сигнал измеряют и осуществляют операцию его сжатия на основе корреляционной обработки или согласованной фильтрации. В результате этого повышают помехозащищённость акустического сигнала, передаваемого в рельсе, и увеличивают дальность зоны измерений, в пределах которой осуществляют обнаружение дефектов рельс.
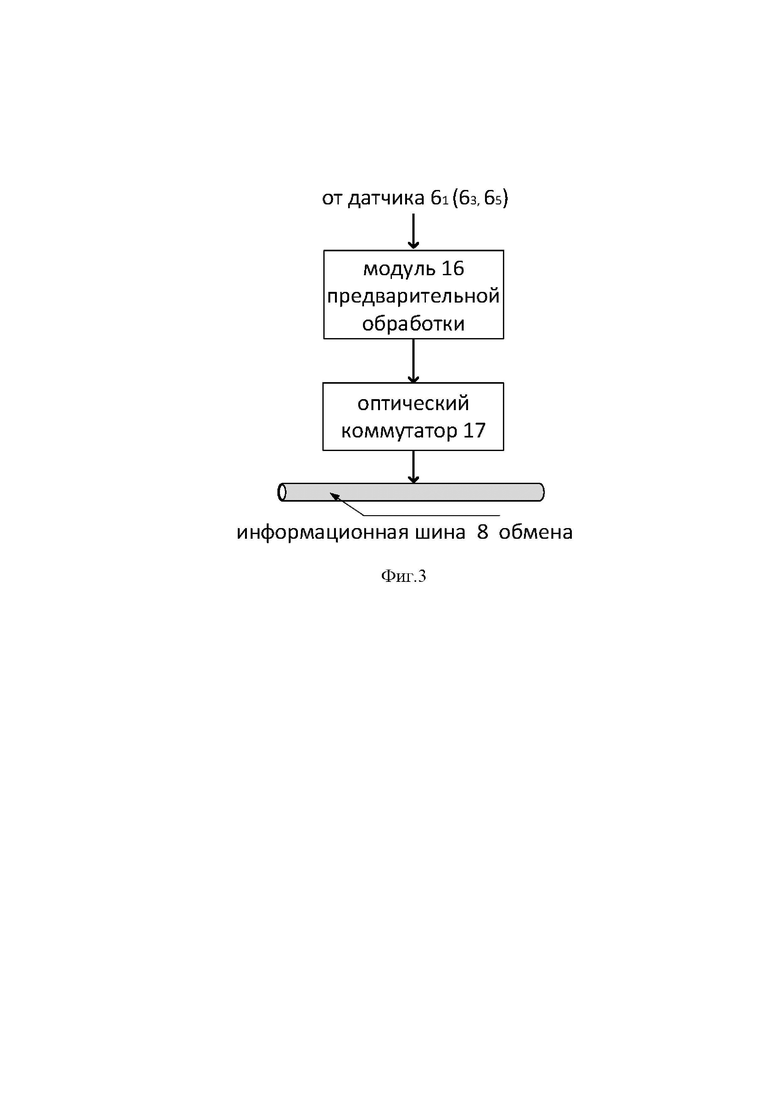
Сущность изобретения поясняется чертежами на фиг. 1-3. На фиг. 1 представлена структурная схема акустической системы обнаружения излома и трещин в рельсе, реализующая предлагаемый способ, на фиг. 2 – структурная схема основной измерительной группы, на фиг. 3 – структурная схема периферийной измерительной группы.
Работа предложенного акустического способа обнаружения излома и трещины в рельсах показана на примере с организацией двух зон измерения.
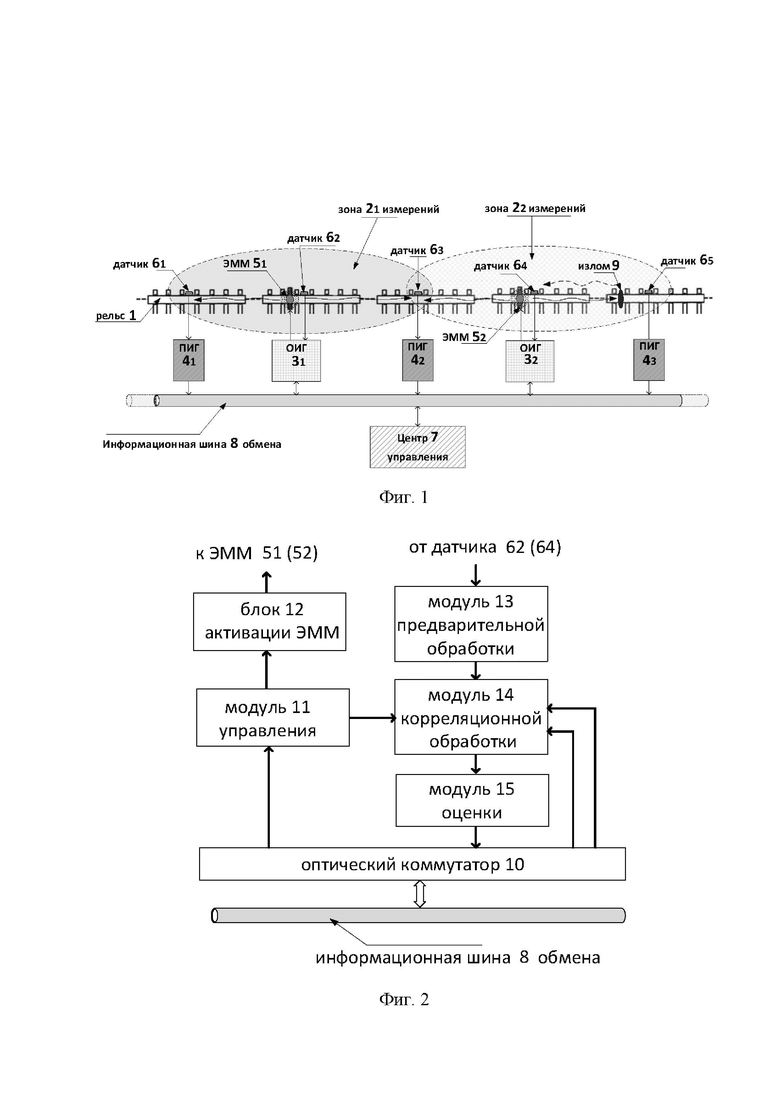
На фиг. 1 позицией 1 обозначен рельс, а позицией 21 и 22 – соответственно первая и вторая зоны измерения.
Акустическая система обнаружения излома и трещин в рельсе содержит основные измерительные группы ОИГ31 и ОИГ32, периферийные измерительные группы ПИГ41, ПИГ42, ПИГ43, электромагнитные молотки ЭММ 51 и ЭММ 52, датчики 61, 62, 63, 64, и 65, центр 7 управления системой диагностики, подключенный к информационной шине 8 обмена, к которой подключены также ОИГ31, ОИГ32, ПИГ41, ПИГ42, и ПИГ 43. При этом ЭММ 51 установлен в центре первой зоны 21 измерения, в непосредственно близости от него на рельсе расположен датчик 62. ЭММ 52 установлен в центре второй зоны 22 измерения, в непосредственно близости от него на рельсе расположен датчик 64. Датчики 61 и 63 расположены на концах первой зоны 21 измерения, датчики 63 и 65 – на концах второй зоны 22 измерения.
На фиг. 1 позицией 9 обозначен излом рельса 1.
В состав ОИГ31 (ОИГ32) (Фиг. 2) входят последовательно соединенные оптический коммутатор 10, модуль 11 управления и блок 12 активации воздействия ЭММ51 (ЭММ 52) на рельс 1, модуль 13 предварительной обработки, входом подключенный к выходу датчика 62 (64), последовательно соединенные модуль 14 корреляционной обработки и модуль 15 оценки результатов измерений, выходом через оптический коммутатор 10 подключенный к информационной шине 8 обмена, при этом модуль 13 предварительной обработки выходом соединен с входом модуля 14 корреляционной обработки, другие входы которого подключены к выходу модуля 11 управления и соответствующим выходам оптического коммутатора 10.
ПИГ41, (ПИГ42) (ПИГ 43) включает последовательно соединенные модуль 16 предварительной обработки, входом соединенный с выходом датчика 61, (63) (65) и оптический коммутатор 17, выходом подключенный к информационной шине 8 обмена.
Акустическая система обнаружения излома и трещины в рельсе функционирует следующим образом.
В центре 7 управления формируют соответствующее задание для зон 21 и 22 измерений на осуществление контроля заданных участков рельса с установкой на формирование кодов Баркера-13, представленных в импульсной форме. Задание центр 7 управления посредством информационной шины 8 передает через оптический коммутатор 10 на вход модуля 11 управления каждого ОИГ31 и ОИГ32.
Блок 11 управления ОИГ31 получив задание центра 7 управления формирует на своем выходе импульсную форму представления прямого кода Баркера-13 и передает его в блок 12 активатора ЭММ51. Блок 11 управления ОИГ32, получив задание центра 7 управления, формирует на своем выходе импульсную форму представления инверсного кода Баркера-13 и передает его в блок 12 активатора ЭММ 52. Соответствующий сигнал в виде импульсной формы кода Баркера-13 поступает на исполнительный механизм ЭММ51 и ЭММ52, каждый из которых осуществляет периодические импульсные воздействия на рельс.
Периодические импульсные воздействия на рельс, выполняемые посредством как ЭММ51, так и ЭММ52 производят на основе временных интервалов (Тi), порядок следования которых и их длительности подчинены определённой закономерности. В предлагаемом изобретении ЭММ51 и ЭММ52 соответственно в зоне 21 и 22 измерений на рельс 1 наносят серии ударов с установленной частотой в течение времени, определяемом высоким уровнем амплитуды кодов Баркера-13, представленных в импульсной форме. Серии периодических ударов о рельс, прерываются паузами, продолжительность которых определяет низкий уровень импульсной формы кода Баркера-13. Это означает, что во время действия символа «0» двоичного кода управляющего сигнала ЭММ51 зоны 21 измерения работу прекращает, но в это время работает ЭММ52 зоны 22 измерения, поскольку для управления сериями периодических ударов ЭММ52 используют импульсную форму представления инверсного кода Баркера-13. Таким образом, осуществляют периодическое включение в работу ЭММ51 и ЭММ52. Такой вариант работы не мешает распознаванию источника ударов о рельс (ЭММ51 или ЭММ52).
После нанесения заданной серии ударных воздействий, выполненных ЭММ51, или ЭММ52, данные акустических сигналов в рельсе, сформированных воздействием на рельс, измеряют все датчики 61, 62, 63, 64 и 65.
В каждом ОИГ31 и ОИГ32 блок 13 осуществляет предварительную обработку измеренных акустических сигналов соответственно датчиком 62 и 64 путем их предварительной фильтрации, усиления и аналого-цифрового преобразования. В каждом ПИГ41, ПИГ42, ПИГ 43 блок 16 осуществляет предварительную обработку измеренных отраженных акустических сигналов соответственно датчиками 61, 63 и 65.
Результат предварительной обработки акустических сигналов может быть, как идеальным при минимальном уровне искажений АС, так и значительно отличающимся при искажении до 50% от структуры исходного.
В зоне 21 измерений результаты предварительной обработки измеренных датчиком 62 акустических сигналов блок 13 ОИГ31 передает на вход модуля 14 корреляционной обработки, входящего в его состав. На второй вход модуля 14 ОИГ31 блок 16 ПИГ41 через коммутатор 17, входящий в состав ПИГ41, информационную шину 8 и коммутатор 10 ОИГ31 направляет результаты предварительной обработки измеренных отраженных акустических сигналов датчиком 61, а на третий вход – блок 11 ОИГ31 передает сигнал в виде импульсной последовательности прямого кода Баркера-13.
Аналогичным образом в зоне 22 измерений результаты предварительной обработки измеренных датчиком 64 акустических сигналов блок 13 ОИГ32 передает на вход модуля 14 корреляционной обработки, входящего в состав ОИГ32. На второй вход модуля 14 ОИГ32 блок 16 ПИГ43 через коммутатор 17, информационную шину 8 и коммутатор 10 ОИГ32 передает результаты предварительной обработки измеренных отраженных акустических сигналов датчиком 64, а на третий вход – сигнал в виде импульсной последовательности инверсного кода Баркера-13 передает блок 11 ОИГ32.
При этом блок 16 ПИГ42, передает одновременно результаты предварительной обработки измеренных акустических сигналов датчиком 63 через коммутатор 17, входящий в состав ПИГ42, информационную шину 8 и соответствующий коммутатор 10 на четвертый вход модулей 14 ОИГ31 и ОИГ32.
Таким образом, на вход модулей 14 ОИГ31 и ОИГ32 для процедуры корреляционной обработки акустических сигналов (АС) в каждой зоне измерений, сформированных воздействием на рельс как ЭММ 51, так и ЭММ 52, поступает импульсная последовательно кода Баркера-13 в соответствии с заданием центра 7 на формирование серии ударно-импульсных воздействий на рельс 1, усиленные и оцифрованные акустические сигналы, измеренные соответственно датчиками 62 и 64 в центре зон 21 и 22 измерений, и соответственно датчиками 61, 63 и 63, 65, удалёнными на равном расстоянии от центра зон 21 и 22 измерения.
В модуле 14 ОИГ31 и ОИГ32 сигналы подвергают корреляционной обработке. Результаты корреляционной обработки представляются в виде характерной треугольной импульсной последовательности с определенным чередованием их полярностей для прямого и инверсного кодов Баркера-13.
На основе данных корреляционной обработки акустических сигналов модуль 15 ОИГ31 (ОИГ32) определяет признаки наличия/отсутствия признаков излома (трещин) в рельсе 1 на участках зон 21 (22) измерений. При определении признаков излома или трещины модуль 15 определяет место его локализации в рельсе, формирует информационное сообщение, касающееся локализации излома или трещины на участках зон 21 и 22 измерений и передает его через оптический коммутатор 10 ОИГ31 (ОИГ32) в центр 7 управления для оперативного принятия соответствующих решений.
Модуль 15 ОИГ31 (15 ОИГ32) определяет отсутствие признаков излома или трещины в рельсе на участках зоны 21 (22) измерения, если акустический сигнал, формируемый ЭММ51 (ЭММ52), измеренный датчиками 61 и 63 (63 и 65) получен одновременно, а наличие излома или трещины в рельсе на соответствующем участке зоны 21 (22) измерения – если акустический сигнал датчиком 61 или 63 (63 или 65) не получен, а датчик 62 (64) принял акустический сигнал с временной задержкой. При этом модуль 15 для определения места локации излома или трещины рассчитывает расстояние до излома или трещины с учетом скорости распространения акустического сигнала в рельсе и времени задержки приема акустического сигнала датчиком 62 (64).
На фиг. 1 участок зоны 21 измерений представлены без дефекта рельса. Модуль 14 за счет поступления импульсной последовательности кода Баркера-13 фиксирует момент включения ЭММ 51, расположенного в центре зоны 21 измерений, для передачи в рельс посылки импульсного воздействия. При этом сигнал распространяется с одинаковой скоростью и затуханием в обе стороны, как в сторону датчика 61, так и в сторону датчика 63 и достигает их с временной задержкой τ, определяемой на основе формулы:
τ = L / Vp,
где τ – временная задержка распространения волны для рельса без дефекта;
L – расстояние от места размещения молотка ЭММ 51, на рельсе в непосредственной близости от которого установлен датчик 62, до места установки датчиков 61 и 63;
Vp – скорость распространения виброакустической волны (≈ 6 км/с).
Сигнал воздействия приходит на датчик 62 практически сразу (временной задержкой из-за его близкого расположения к ЭММ 51, можно пренебречь) с исходной амплитудой без затухания, поэтому его энергетические характеристики можно считать «эталонными». В случае, если рельс не имеет дефектов, сигналы, получаемые датчиками 61 и 63, будут обладать примерно равными характеристиками затухания и временных задержек (с учётом их зависимостей от изменения климатических условий и их влияния на физические свойства металла рельса, как среды распространения).
Таким образом, при контроле участков зоны 21 измерений без дефектов рельса акустические сигналы, измеренные датчиками 61 и 63, будут получены одновременно. По результатам корреляционной обработки модуль 15 ОИГ31 определяет одинаковое время τ задержки приема акустического сигнала датчиками 61 и 63, на основании чего фиксирует отсутствие признаков излома или трещины в рельсе на участках зоны 21 измерения.
На фиг. 1 на участке зоны 22 измерений представлен дефект рельса 9, который характеризуется как излом. В момент включения ЭММ 52 в зоне контроля, содержащего излом рельса, и введения в рельс посылки импульсного воздействия, сигнал приходит на датчик 64 практически сразу. Далее всё повторяется, как и для уже рассмотренного импульсного воздействия в зоне 21 измерений. Акустический сигнал распространяется с одинаковой скоростью и затуханием в обе стороны, как в сторону датчика 63, так и в сторону датчика 65. При этом, если он достигает датчика 63 с той же временной задержкой τ, что и при контроле участка между датчиками 62 и 63 зоны 21 измерений от воздействия ЭММ 52 на рельс, то модуль 15 ОИГ32 определяет отсутствие излома рельса на участке железнодорожного пути между датчиками 63 и 64.
В случае излома в рельсе на участке между 64 и 65 до датчика 65 акустический сигнал не доходит, поскольку его прохождению мешает излом рельса. При этом появляется отражённый импульс от излома, направляющийся в обратную сторону – к датчику 64, которого он достигает с другой временной задержкой τотр:
τотр = 2l / Vp,
где τотр – временная задержка распространения акустического сигнала до излома рельса и обратно;
l – расстояние от места появления воздействия ЭММ 52 на рельс до дефекта в виде излома рельса.
При этом модуль 15 ОИГ32 фиксирует в зоне 22 измерений отсутствие акустического сигнала на выходе датчика 65, по результатам корреляционной обработки сигналов определяет задержку τотр и τ времени приема акустического сигнала соответственно датчиком 64 и 63, на основании чего делает вывод о присутствие признаков излома на участке зоны 22 измерений между датчиками 64 и 65, измеряют расстояние l до дефекта и формирует соответствующее информационное сообщение о результатах контроля зоны 22 измерения для передачи его через коммутатор 10 ОИГ32 и информационную шину 8 обмена в центр 7 управления.
Таким образом, предлагаемый способ обеспечивает повышение надежности обнаружения трещин и излома в рельсах за счет увеличения помехозащищённости акустических сигналов, формируемых в результате серии периодических ударов по рельсу, задаваемых импульсной последовательностью кода Баркера-13, обладающего идеальными автокорреляционными свойствами.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МОНИТОРИНГА ТЕХНИЧЕСКОГО СОСТОЯНИЯ РЕЛЬСОВОГО ПУТИ | 2016 |
|
RU2636827C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ АВТОМАТИЧЕСКОЙ БЛОКИРОВКИ И АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ С ИСПОЛЬЗОВАНИЕМ ШИРОКОПОЛОСНЫХ СИГНАЛОВ | 2021 |
|
RU2841083C2 |
| Импульсно-акустический способ определения местоположения внутритрубного очистного снаряда в магистральном трубопроводе | 2018 |
|
RU2691779C1 |
| АКУСТИЧЕСКИЙ СПОСОБ ОБНАРУЖЕНИЯ НЕИСПРАВНОСТИ РЕЛЬСОВОГО ПУТИ | 2012 |
|
RU2511644C1 |
| СПОСОБ МАГНИТНОГО КОНТРОЛЯ СВАРНЫХ СТЫКОВ РЕЛЬСОВ | 2015 |
|
RU2586090C1 |
| СПОСОБ КОМПЛЕКСНОЙ ДИАГНОСТИКИ СВАРНЫХ ШВОВ РЕЛЬСОВ БЕССТЫКОВОГО ПУТИ И ПРИБОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2742599C1 |
| СПОСОБ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ ЖЕЛЕЗНОДОРОЖНЫХ РЕЛЬСОВ В ПРОЦЕССЕ ДВИЖЕНИЯ ПОДВИЖНОГО СОСТАВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2380259C1 |
| Система интервального регулирования движения поездов | 2021 |
|
RU2770040C1 |
| Электромагнитно-акустический преобразователь для ультразвукового контроля | 2016 |
|
RU2649636C1 |
| Система интервального регулирования движения поездов на базе радиоканала | 2018 |
|
RU2685109C1 |
Изобретение относится к неразрушающему контролю технического состояния рельсовых путей. Акустический способ обнаружения излома или трещины в рельсах заключается в том, что в зоне измерения в рельсы передают акустический сигнал, формируемый в результате серии периодических ударов по рельсу от калиброванного источника, в качестве которого используют управляемый электромагнитный молоток, размещенный в центре зоны измерения, акустический сигнал измеряют тремя датчиками, установленными на рельсе, первый из которых установлен в непосредственной близости к электромагнитному молотку, а второй и третий - на концах зоны измерения. Осуществляют предварительную обработку измеренных датчиками акустических сигналов путем фильтрации, усиления и аналого-цифрового преобразования с последующей их корреляционной обработкой или согласованной фильтрацией, по результатам которой определяют время задержки приема акустического сигнала каждым датчиком с последующим анализом их значений. В случае если акустический сигнал получен вторым и третьим датчиком одновременно, определяют отсутствии признаков излома или трещины в рельсе на участке измерения. Если отраженный сигнал вторым или третьим датчиком не получен, а первый датчик принял акустический сигнал с временной задержкой, то определяют наличие излома или трещины в рельсе на соответствующем участке зоны измерения, при этом для управления сериями ударов электромагнитного молотка используют импульсную форму представления кода Баркера-13, которую также используют для регистрации процесса воздействия на рельс при корреляционной обработке или согласованной фильтрации предварительно обработанных акустических сигналов. Расстояние до обнаруженного излома или трещины рассчитывают с учетом скорости распространения акустического сигнала в рельсе и времени задержки приема отраженного от излома или трещины акустического сигнала первым датчиком. В результате повышается надежность обнаружения трещин и излома в рельсах, и увеличивается дальности зоны измерений. 1 з.п. ф-лы, 3 ил. 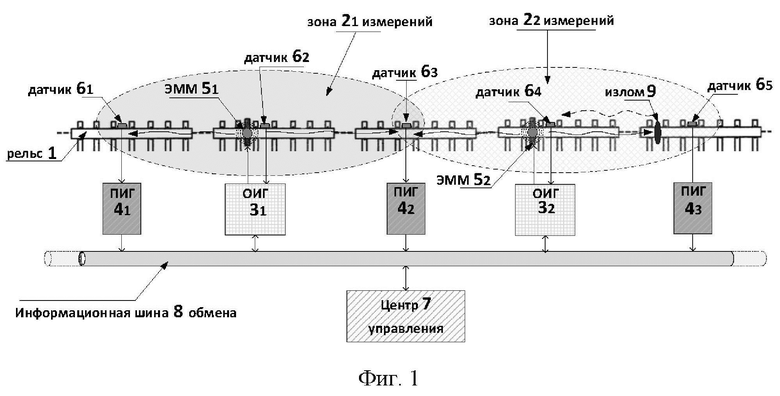
1. Акустический способ обнаружения излома или трещины в рельсах, заключающийся в том, что в зоне измерения в рельсы передают акустический сигнал, формируемый в результате серии периодических ударов по рельсу от калиброванного источника, в качестве которого используют управляемый электромагнитный молоток, размещенный в центре зоны измерения, акустический сигнал измеряют тремя датчиками, установленными на рельсе, первый из которых установлен в непосредственной близости к электромагнитному молотку, а второй и третий - на концах зоны измерения, осуществляют предварительную обработку измеренных датчиками акустических сигналов путем фильтрации, усиления и аналого-цифрового преобразования с последующей их корреляционной обработкой или согласованной фильтрацией, по результатом которой определяют время задержки приема акустического сигнала каждым датчиком с последующим анализом их значений, в случае если акустический сигнал получен вторым и третьим датчиком одновременно, определяют отсутствии признаков излома или трещины в рельсе на участке измерения, если отраженный сигнал вторым или третьим датчиком не получен, а первый датчик принял акустический сигнал с временной задержкой, то определяют наличие излома или трещины в рельсе на соответствующем участке зоны измерения, при этом для управления сериями ударов электромагнитного молотка используют импульсную форму представления кода Баркера-13, которую также используют для регистрации процесса воздействия на рельс при корреляционной обработке или согласованной фильтрации предварительно обработанных акустических сигналов, а расстояние до обнаруженного излома или трещины рассчитывают с учетом скорости распространения акустического сигнала в рельсе и времени задержки приема отраженного от излома или трещины акустического сигнала первым датчиком.
2. Способ по п. 1, отличающийся тем, что обнаружения излома или трещины в рельсах проводят в двух зонах измерения, при этом для управления сериями ударов электромагнитного молотка на второй зоне измерения используют импульсную форму представления инверсного кода Баркера-13, а для измерения отраженного сигнала на одном конце второй зоны измерения используют акустический датчик, установленный на конце первой зоны измерения.
| WO 2015178868 A1, 26.11.2015 | |||
| СПОСОБ УЛЬТРАЗВУКОВОГО ОБНАРУЖЕНИЯ МИКРОТРЕЩИН НА ПОВЕРХНОСТИ КАТАНИЯ ГОЛОВКИ РЕЛЬСА | 2017 |
|
RU2652511C1 |
| СПОСОБ ДИАГНОСТИКИ РЕЛЬСОВОГО ПУТИ | 2013 |
|
RU2521095C1 |
| CN 1097035599 A, 03.05.2019 | |||
| US 20230024577 A1, 26.01.2023. | |||

