Предлагаемое изобретение относится к электротехнике и может быть использовано для создания автоматических регуляторов возбуждения мощных синхронных двигателей.
Известен способ регулирования возбуждения синхронной машины и устройство, реализующее этот способ (патент RU №2145766, МПК Н 02 Р 9/14).
Способ заключается в том, что измеряют активную и реактивную составляющие тока статора синхронной машины, напряжение статора и подают на обмотку возбуждения напряжение, величину которого определяют по определенным критериям.
Основным недостатком приведенного способа и реализующего его устройства является то, что не обеспечивается эффективное подавление качаний ротора в переходных режимах при изменении нагрузки и напряжения сети.
Наиболее близким по технической сущности к заявляемому способу является способ регулирования возбуждения синхронного двигателя (Б.Н.Абрамович, А.А.Круглый. "Возбуждение, регулирование и устойчивость синхронных двигателей". Л., "Энергоатомиздат", 1983, стр.104-107). Способ заключается в том, что выполняют измерение напряжения статора синхронного двигателя, измерение и преобразование активной составляющей тока статора синхронного двигателя, измерение и преобразование реактивной составляющей тока двигателя и тока возбуждения. Величину напряжения, подаваемого на обмотку возбуждения, определяют в зависимости от измеренных величин.
Признаками прототипа, совпадающими с существенными признаками заявляемого способа, являются измерение текущего значения активной и реактивной составляющих тока синхронного двигателя, измерение напряжения статора синхронного двигателя и тока в обмотке возбуждения. В зависимости от измеренных величин определяют величину напряжения возбуждения и подают его на обмотку возбуждения синхронного двигателя.
Наиболее близким по технической сущности к заявляемому устройству регулирования возбуждения синхронных двигателей является устройство (Б.Н.Абрамович, А.А.Круглый. "Возбуждение, регулирование и устойчивость синхронных двигателей". Л., "Энергоатомиздат", 1983, стр.104-107), содержащее измерители напряжения и тока статора синхронного двигателя, измеритель угла ϕ, измеритель тока ротора, усилитель и фазоимпульсное устройство.
Признаками прототипа, совпадающими с существенными признаками заявляемого устройства, являются: измеритель действующего значения напряжения статора синхронного двигателя, измеритель действующего значения тока статора синхронного двигателя, измеритель отклонения угла ϕ и измеритель тока ротора.
К недостаткам известных способа и устройства регулирования возбуждения синхронного двигателя можно отнести недостаточно эффективное подавление качаний ротора синхронного двигателя при изменениях нагрузки и напряжения сети, а также недостаточную статическую устойчивость двигателя при изменении нагрузки.
Задачей изобретения является создание способа и устройства регулирования возбуждения синхронного двигателя, обеспечивающего повышение эффективности подавления качаний ротора при изменениях нагрузки и напряжения сети, а также статической устойчивости двигателя во всем возможном диапазоне изменения нагрузки.
Технический результат при осуществлении изобретения достигается тем, что в заявляемом способе регулирования напряжения синхронного двигателя измеряют текущие значения общего тока I синхронного двигателя, угла сдвига ϕ между током и напряжением синхронного двигателя, напряжения U1 статора синхронного двигателя, тока If в обмотке возбуждения. Оценивают внутренний угол двигателя θ в результате решения системы уравнений вида:

где
 - вектор активного и реактивного тока синхронного двигателя;
- вектор активного и реактивного тока синхронного двигателя;
 ,
,  - операторы поворота вектора на 90° в положительном направлении и сопряженный ему оператор соответственно;
- операторы поворота вектора на 90° в положительном направлении и сопряженный ему оператор соответственно;
 - векторная переменная с компонентами cosθ и sinθ,
- векторная переменная с компонентами cosθ и sinθ,
 - вектор потокосцеплений успокоительных обмоток в осях d и q соответственно;
- вектор потокосцеплений успокоительных обмоток в осях d и q соответственно;
ω0 - синхронная угловая частота;
 - матрица активных сопротивлений успокоительных обмоток, в которой rkd, rkq - активные сопротивления успокоительных обмоток в осях d и q соответственно;
- матрица активных сопротивлений успокоительных обмоток, в которой rkd, rkq - активные сопротивления успокоительных обмоток в осях d и q соответственно;
 вектор тока статора, где Id, Iq - продольная и поперечная составляющие тока статора соответственно;
вектор тока статора, где Id, Iq - продольная и поперечная составляющие тока статора соответственно;
 - вектор тока успокоительных обмоток, где Ikd, Ikq - токи в продольной и поперечной успокоительных обмотках соответственно;
- вектор тока успокоительных обмоток, где Ikd, Ikq - токи в продольной и поперечной успокоительных обмотках соответственно;
 - матрица взаимных реактивностей хad, хaq статорных обмоток в осях (d, q) соответственно;
- матрица взаимных реактивностей хad, хaq статорных обмоток в осях (d, q) соответственно;
 - матрица собственных реактивностей хkd, хkq успокойтельных обмоток в осях (d, q) соответственно;
- матрица собственных реактивностей хkd, хkq успокойтельных обмоток в осях (d, q) соответственно;
 - матрица взаимных реактивностей обмотки возбуждения;
- матрица взаимных реактивностей обмотки возбуждения;
 - вектор ЭДС двигателя, где Еd, Еq - продольная и поперечная составляющие ЭДС двигателя соответственно;
- вектор ЭДС двигателя, где Еd, Еq - продольная и поперечная составляющие ЭДС двигателя соответственно;

 - векторные константы, где ra, хd, хq - активное и реактивные сопротивления обмоток статора в осях соответственно;
- векторные константы, где ra, хd, хq - активное и реактивные сопротивления обмоток статора в осях соответственно;
V1, V2, V3, V4 - вспомогательные переменные, вычисляемые через напряжения, токи и параметры двигателя;
вычисляют S1 и S2:
S1=Q-Qref - отклонение реактивной мощности от заданного значения;
 - отклонение от желаемой траектории движения системы в пространстве координат
- отклонение от желаемой траектории движения системы в пространстве координат  ,
,  , Q, заданной уравнениями
, Q, заданной уравнениями


где T1 - желаемая постоянная времени затухания колебаний ротора; Q - реактивная мощность двигателя; Qref - уставка реактивной мощности;
, - первая и вторая производные по времени внутреннего угла двигателя,
вычисляют чувствительность Sa функции  к изменениям напряжения возбуждения Uf
к изменениям напряжения возбуждения Uf

где
С∈[0, 1] - константа, определяющая стратегию регулятора;

 - матричные константы, содержащие параметры двигателя; хf - реактивность обмотки возбуждения;
- матричные константы, содержащие параметры двигателя; хf - реактивность обмотки возбуждения;
Tj - суммарная постоянная времени ротора и исполнительного механизма;
а величину напряжения Uf, подаваемого на обмотку возбуждения, определяют по формуле
где
Ef_ref - напряжение на обмотке возбуждения генератора, соответствующее номинальному току возбуждения;
Uas=f(Sa) - выходное напряжение нечеткого контроллера.
Отличительными от прототипа признаками являются: оценка внутреннего угла двигателя θ в результате решения системы уравнений, вычисление отклонения S1 и S2 от желаемой траектории движения системы в пространстве координат , , Q, заданной уравнениями Q-Qref=0,  , вычисление чувствительности Sa функции к изменениям напряжения возбуждения Uf, определение величины напряжения Uf, подаваемого на обмотку возбуждения.
, вычисление чувствительности Sa функции к изменениям напряжения возбуждения Uf, определение величины напряжения Uf, подаваемого на обмотку возбуждения.
При осуществлении заявляемого устройства регулирования возбуждения синхронного двигателя указанный выше технический результат достигается тем, что заявляемое устройство содержит измеритель действующего значения напряжения Ul статора синхронного двигателя, измеритель действующего значения тока I статора синхронного двигателя, измеритель угла ϕ и измеритель тока If ротора, а также блок вычисления активной и реактивной составляющих тока статора, блок преобразования координат, блок вычисления реактивной мощности, блок оценки электродвижущей силы двигателя, блок вычисления внутреннего угла двигателя θ и его первой и второй производных, первый формирующий блок для вычисления напряжения Uas, второй формирующий блок для вычисления напряжения Uf. Первый вход блока вычисления активной и реактивной составляющих тока статора подключен к выходу измерителя действующего значения тока статора, второй - к выходу измерителя угла ϕ; первый выход блока вычисления активной и реактивной составляющих тока статора связан с третьим входом блока преобразования координат, второй выход связан с четвертым входом блока преобразования координат и с первым входом блока вычисления реактивной мощности двигателя; первый вход блока преобразования координат подключен к первому выходу блока вычисления внутреннего угла двигателя θ, второй вход блока преобразования координат подключен к выходу измерителя действующего значения напряжения статора; первый выход блока преобразования координат связан с третьим входом блока оценки электродвижущей силы двигателя и с четвертым входом первого формирующего блока, второй выход блока преобразования координат связан с четвертым входом блока оценки электродвижущей силы двигателя и с пятым входом первого формирующего блока; второй вход блока вычисления реактивной мощности двигателя подключен к выходу измерителя действующего значения напряжения статора, выход блока вычисления реактивной мощности двигателя связан с шестым входом первого формирующего блока; первый вход блока оценки электродвижущей силы двигателя связан с выходом блока синхронной угловой частоты ω0, второй вход блока оценки электродвижущей силы двигателя подключен к выходу измерителя тока ротора; первый выход блока оценки электродвижущей силы двигателя связан с первым входом блока вычисления внутреннего угла двигателя и его производных, второй выход блока оценки электродвижущей силы двигателя связан со вторым входом блока вычисления внутреннего угла двигателя и его производных; первый выход блока вычисления внутреннего угла двигателя и его производных подключен к первому входу блока преобразования координат и к первому входу первого формирующего блока, второй выход подключен ко второму входу первого формирующего блока, третий выход связан с третьим входом первого формирующего блока; седьмой вход первого формирующего блока вход связан с выходом блока константы T1, восьмой вход первого формирующего блока подключен к выходу блока константы Tj, девятый вход первого формирующего блока подключен к выходу блока константы С, десятый вход первого формирующего блока подключен к выходу блока константы Qref; выход первого формирующего блока связан со вторым входом второго формирующего блока, первый вход которого подключен к выходу блока константы Еf_ref.
Отличительными от прототипа признаками является то, что заявляемое устройство содержит блок вычисления активной и реактивной составляющих тока статора, блок преобразования координат, блок вычисления реактивной мощности, блок оценки электродвижущей силы двигателя, блок вычисления внутреннего угла двигателя и его первой и второй производных, первый формирующий блок для вычисления напряжения Uas и второй формирующий блок для вычисления напряжения Uf. Соединены входящие в устройство блоки следующим образом. Первый вход блока вычисления активной и реактивной составляющих тока статора подключен к выходу измерителя действующего значения тока статора, второй - к выходу измерителя угла ϕ; первый выход блока вычисления активной и реактивной составляющих тока статора связан с третьим входом блока преобразования координат, второй выход связан с четвертым входом блока преобразования координат и с первым входом блока вычисления реактивной мощности двигателя; первый вход блока преобразования координат подключен к первому выходу блока вычисления внутреннего угла двигателя θ, второй вход блока преобразования координат подключен к выходу измерителя действующего значения напряжения статора; первый выход блока преобразования координат связан с третьим входом блока оценки электродвижущей силы двигателя и с четвертым входом первого формирующего блока, второй выход блока преобразования координат связан с четвертым входом блока оценки электродвижущей силы двигателя и с пятым входом первого формирующего блока; второй вход блока вычисления реактивной мощности двигателя подключен к выходу измерителя действующего значения напряжения статора, выход блока вычисления реактивной мощности двигателя связан с шестым входом первого формирующего блока; первый вход блока оценки электродвижущей силы двигателя связан с выходом блока синхронной угловой частоты ω0, второй вход блока оценки электродвижущей силы двигателя подключен к выходу измерителя тока ротора; первый выход блока оценки электродвижущей силы двигателя связан с первым входом блока вычисления внутреннего угла двигателя и его производных, второй выход блока оценки электродвижущей силы двигателя связан со вторым входом блока вычисления внутреннего угла двигателя и его производных; первый выход блока вычисления внутреннего угла двигателя и его производных подключен к первому входу блока преобразования координат и к первому входу первого формирующего блока, второй выход подключен ко второму входу первого формирующего блока, третий выход связан с третьим входом первого формирующего блока; седьмой вход первого формирующего блока вход связан с выходом блока константы T1, восьмой вход первого формирующего блока подключен к выходу блока константы Tj, девятый вход первого формирующего блока подключен к выходу блока константы С, десятый вход первого формирующего блока подключен к выходу блока константы Qref; выход первого формирующего блока связан со вторым входом второго формирующего блока, первый вход которого подключен к выходу блока константы Еf_ref.
Сущность изобретения поясняется фиг.1-16, где на фиг.1 представлена функциональная схема регулирования возбуждения синхронного двигателя; на фиг.2 - схема блока вычисления активной и реактивной составляющих тока статора (Ia, Ir); на фиг.3 - схема блока преобразования координат (Id, Iq); на фиг.4 - схема блока вычисления реактивной мощности (Q); на фиг.5 - схема блока оценки ЭДС (Еd, Еq); на фиг.6 - схема вычисления внутреннего угла машины θ; на фиг.7 - схема блока вычисления производных угла θ ( ,
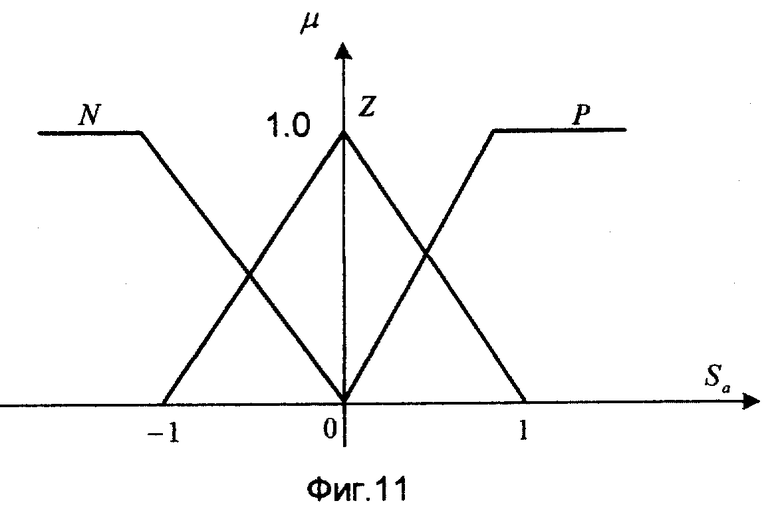
, ); на фиг.8 - схема блока формирования сигналов S1, S2 на фиг.9 - схема блока формирования сигнала Sa; на фиг.10 - схема блоков формирования сигналов Uas и Uf; на фиг.11, 12 - диаграммы входной и выходной лингвистических переменных нечеткого контроллера; на фиг.13 - пример вычисления значения выходной переменной Uas при текущем значении входной переменной Sa=-0,7; на фиг.14 - блок-схема алгоритма функционирования при реализации способа с применением вычислительной техники; на фиг.15 - функциональная схема системы возбуждения синхронного двигателя, на фиг.16 представлены результаты моделирования работы синхронного двигателя типа СТД (СТДП), возбудитель которого управляется предлагаемым способом.
); на фиг.8 - схема блока формирования сигналов S1, S2 на фиг.9 - схема блока формирования сигнала Sa; на фиг.10 - схема блоков формирования сигналов Uas и Uf; на фиг.11, 12 - диаграммы входной и выходной лингвистических переменных нечеткого контроллера; на фиг.13 - пример вычисления значения выходной переменной Uas при текущем значении входной переменной Sa=-0,7; на фиг.14 - блок-схема алгоритма функционирования при реализации способа с применением вычислительной техники; на фиг.15 - функциональная схема системы возбуждения синхронного двигателя, на фиг.16 представлены результаты моделирования работы синхронного двигателя типа СТД (СТДП), возбудитель которого управляется предлагаемым способом.
Последовательность проводимых операций раскрыта на функциональной схеме (фиг.1), содержащей блок 1 вычисления активной и реактивной составляющих тока статора (Ia, Ir), блок 2 преобразования координат, блок 3 вычисления реактивной мощности, блок 4 оценки ЭДС, блок 5 вычисления внутреннего угла θ и его производных и , первый формирующий блок 6 для вычисления напряжения Uas, второй формирующий блок 7 для вычисления напряжения Uf, блок 8 синхронной угловой частоты ω0, блок 9 константы T1, блок 10 константы Тj, блок 11 константы С, блок 12 константы Qref и блок 13 константы Еf_ref.
Способ реализован в устройстве, схемы блоков которого представлены на фиг.2-10.
На фиг.2 приведена схема блока 1 вычисления активной и реактивной составляющих тока (фиг.1). На вход блока 17 подается сигнал ϕ, на выходе формируется сигнал cosϕ. На вход блока 18 подается сигнал ϕ, на выходе формируется сигнал sinϕ. На первый вход умножителя 19 подается сигнал I, на второй - сигнал cosϕ с выхода блока 17. На выходе умножителя 19 формируется сигнал Ia. На первый вход умножителя 20 подается сигнал I, на второй - сигнал sinϕ с выхода блока 18. На выходе умножителя 20 формируется сигнал Ir.
На фиг.3 представлена схема блока 2 преобразования координат. Сигнал Ia подается на вход усилителя 21. На выходе усилителя 21 формируется сигнал (-Ia). Сигнал θ подается на входы блоков 22 и 23. На выходе блока 22 формируется сигнал sine, на выходе блока 23 формируется сигнал cosθ. Выход усилителя 21 соединен с первым входом умножителя 24. На второй вход умножителя 24 подается сигнал sinθ с выхода блока 22. На первый вход умножителя 25 подается сигнал Ia, на второй вход умножителя 25 подается сигнал cosθ с выхода блока 23. На первый вход умножителя 26 подается сигнал Ir, на второй - сигнал cosθ с выхода блока 23. На первый вход умножителя 27 подается сигнал Ir, на второй - сигнал sinθ с выхода блока 22. Сигнал с выхода умножителя 26 подается на первый вход сумматора 28, на второй вход которого подается сигнал с выхода умножителя 24. На выходе сумматора 28 получается сигнал Id. Выходной сигнал умножителя 27 подается на первый вход сумматора 29, на второй вход подается сигнал с выхода умножителя 25. На выходе сумматора 29 получается сигнал Iq.
На фиг.4 - схема блока 3 вычисления реактивной мощности. На первый вход умножителя 30 подается сигнал Ir, на второй вход - сигнал Ul. На выходе формируется сигнал Q.
На фиг.5 представлена схема блока 4 оценки ЭДС. На первый вход умножителя 31 подается сигнал Iq, на второй - константа  с выхода блока 32. На первый вход умножителя 33 подается сигнал Ψkd, на второй - константа
с выхода блока 32. На первый вход умножителя 33 подается сигнал Ψkd, на второй - константа  с выхода блока 34. На первый вход сумматора 35 подается сигнал с выхода умножителя 31, на второй - сигнал с выхода умножителя 33. Сигнал, формируемый на выходе сумматора 35, подается на второй вход умножителя 36 и на вход интегратора 37. На первый вход умножителя 36 подается константа (-xaq) с выхода блока 38. На выходе умножителя 36 формируется сигнал Еd. На первый вход умножителя 39 подается константа (-ω0) с выхода блока 40, на второй - константа rkd с выхода блока 41. На первый вход умножителя 42 подается сигнал, формируемый на выходе интегратора 37, на второй - сигнал с выхода умножителя 39. На выходе умножителя 42 формируется сигнал Ψkq.
с выхода блока 34. На первый вход сумматора 35 подается сигнал с выхода умножителя 31, на второй - сигнал с выхода умножителя 33. Сигнал, формируемый на выходе сумматора 35, подается на второй вход умножителя 36 и на вход интегратора 37. На первый вход умножителя 36 подается константа (-xaq) с выхода блока 38. На выходе умножителя 36 формируется сигнал Еd. На первый вход умножителя 39 подается константа (-ω0) с выхода блока 40, на второй - константа rkd с выхода блока 41. На первый вход умножителя 42 подается сигнал, формируемый на выходе интегратора 37, на второй - сигнал с выхода умножителя 39. На выходе умножителя 42 формируется сигнал Ψkq.
Сигнал If подается на первый вход умножителя 43 и на первый вход сумматора 44. На второй вход умножителя 43 подается константа  с выхода блока 45. Формируемый на выходе умножителя 43 сигнал подается на первый вход сумматора 46. На первый вход умножителя 47 подается константа с выхода блока 45, на второй - сигнал Id. Выходной сигнал умножителя 47 подается на второй вход сумматора 46. На первый вход умножителя 48 подается сигнал Ψkd, на второй - константа
с выхода блока 45. Формируемый на выходе умножителя 43 сигнал подается на первый вход сумматора 46. На первый вход умножителя 47 подается константа с выхода блока 45, на второй - сигнал Id. Выходной сигнал умножителя 47 подается на второй вход сумматора 46. На первый вход умножителя 48 подается сигнал Ψkd, на второй - константа  с выхода блока 49. Сигнал с выхода умножителя 48 подается на третий вход сумматора 46. Выход сумматора 46 связан со вторым входом сумматора 44 и с входом интегратора 50. На первый вход умножителя 52 подается константа хad с выхода блока 53, на второй - сигнал с выхода сумматора 44. На выходе умножителя 52 формируется сигнал Еq. На первый вход умножителя 51 подается константа (-ω0) с выхода блока 54, на второй - константа rkd с выхода блока 55. Выход умножителя 51 связан со вторым входом умножителя 56. На первый вход умножителя 56 подается выходной сигнал интегратора 50. На выходе умножителя 56 формируется сигнал Ψkd.
с выхода блока 49. Сигнал с выхода умножителя 48 подается на третий вход сумматора 46. Выход сумматора 46 связан со вторым входом сумматора 44 и с входом интегратора 50. На первый вход умножителя 52 подается константа хad с выхода блока 53, на второй - сигнал с выхода сумматора 44. На выходе умножителя 52 формируется сигнал Еq. На первый вход умножителя 51 подается константа (-ω0) с выхода блока 54, на второй - константа rkd с выхода блока 55. Выход умножителя 51 связан со вторым входом умножителя 56. На первый вход умножителя 56 подается выходной сигнал интегратора 50. На выходе умножителя 56 формируется сигнал Ψkd.
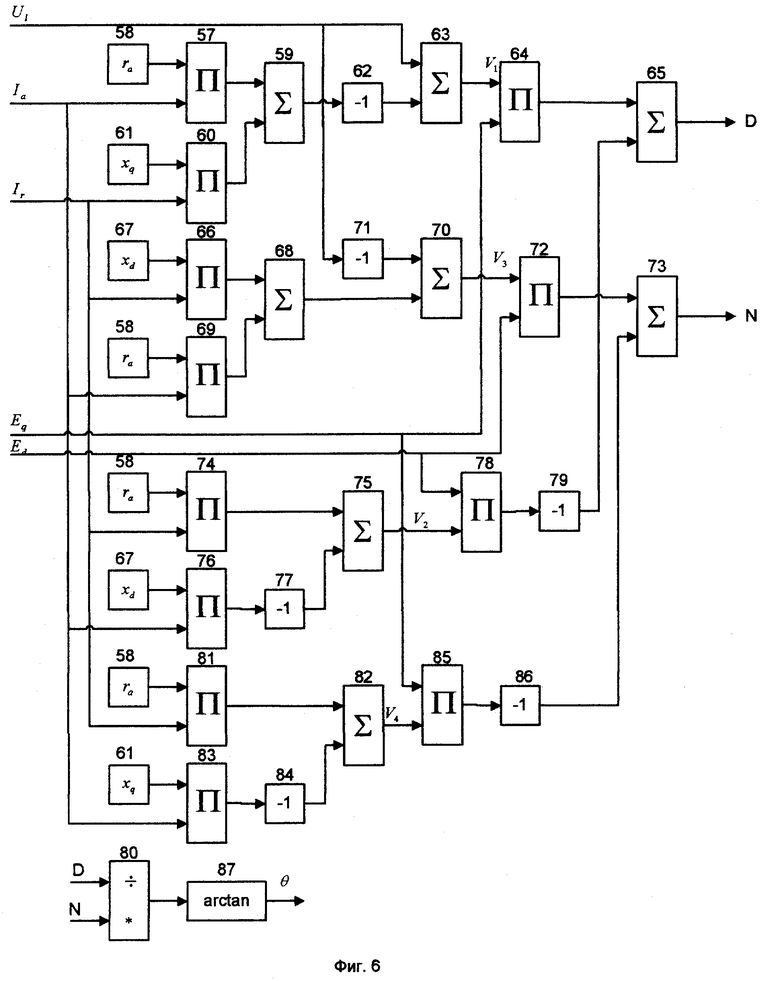
На фиг.6 представлена схема блока 5 вычисления внутреннего угла θ. На первый вход умножителя 57 подается константа ra с выхода блока 58, на второй - сигнал Ia. Выход умножителя 57 связан с первым входом сумматора 59. На первый вход умножителя 60 подается константа хq с выхода блока 61. на второй - сигнал Ir. Выходной сигнал с умножителя 60 подается на второй вход сумматора 59. Выход сумматора 59 связан с входом усилителя 62. Сигнал с выхода усилителя 62 подается на второй вход сумматора 63, на первый вход сумматора 63 подается сигнал U1. На выходе сумматора 63 формируется сигнал V1, который подается на первый вход умножителя 64. На второй вход умножителя 64 подается сигнал Еq. Выходной сигнал умножителя 64 подается на первый вход сумматора 65.
На первый вход умножителя 66 подается константа хd с выхода блока 67, на второй - сигнал Ir. Выход умножителя 66 связан с первым входом сумматора 68. На первый вход умножителя 69 подается константа ra с выхода блока 58, на второй - сигнал Ia. Выходной сигнал умножителя 69 подается на второй вход сумматора 68. Выход сумматора 68 связан со вторым входом сумматора 70. На вход усилителя 71 подается сигнал Ul. Выход усилителя 71 связан с первым входом сумматора 70. На выходе сумматора 70 формируется сигнал V3, который подается на первый вход умножителя 72. На второй вход умножителя 72 подается сигнал Еd. Выход умножителя 72 связан с первым входом сумматора 73.
На первый вход умножителя 74 подается константа ra с выхода блока 58, на второй - сигнал Ir. Выходной сигнал умножителя 74 подается на первый вход сумматора 75. На первый вход умножителя 76 подается константа хd с выхода блока 67, на второй - сигнал Ia. Выход умножителя 76 связан с усилителем 77. Сигнал с выхода усилителя 77 подается на второй вход сумматора 75. На выходе сумматора 75 формируется сигнал V2, который подается на второй вход умножителя 78. На первый вход умножителя 78 подается сигнал Еd. Выход умножителя 78 связан с входом усилителя 79. Формируемый на выходе усилителя 79 сигнал подается на второй вход сумматора 65. Выход сумматора 65 связан с входом "делитель" блока 80. На первый вход умножителя 81 подается константа ra с выхода блока 58, на второй - сигнал Ir. Выход умножителя 81 связан с первым входом сумматора 82. На первый вход умножителя 83 подается константа xq с выхода блока 61, на второй - сигнал Ia. Выход умножителя 83 связан с входом усилителя 84. Сигнал с выхода усилителя 84 подается на второй вход сумматора 82. На выходе сумматора 82 формируется сигнал V4, который подается на второй вход умножителя 85. На первый вход умножителя 85 подается сигнал Еq. Выход умножителя 85 связан с входом усилителя 86. Выходной сигнал усилителя 86 подается на второй вход сумматора 73. Выходной сигнал с сумматора 73 подается на вход "делимое" блока 80. Выход блока 80 связан с входом блока 87, на выходе которого формируется сигнал θ.
На фиг.7 представлена схема блока вычисления производных внутреннего угла θ. На вход дифференциатора 88 подается сигнал θ, на выходе дифференциатора 88 получается сигнал . Выход дифференциатора 88 связан с входом дифференциатора 89. На выходе дифференциатора 89 формируется сигнал .
На фиг.8 - схема блока формирования S1 и S2. На вход усилителя 90 подается константа Qref с выхода блока 91. Сигнал с выхода усилителя 90 подается на первый вход сумматора 92. На второй вход сумматора 92 подается сигнал Q. На выходе сумматора 92 формируется сигнал S1. На первый вход умножителя 93 подается константа T1 с выхода блока 12, на второй - сигнал . Выход умножителя 93 связан с первым входом сумматора 94. На второй вход сумматора 94 подается сигнал . На выходе сумматора 94 формируется сигнал S2.
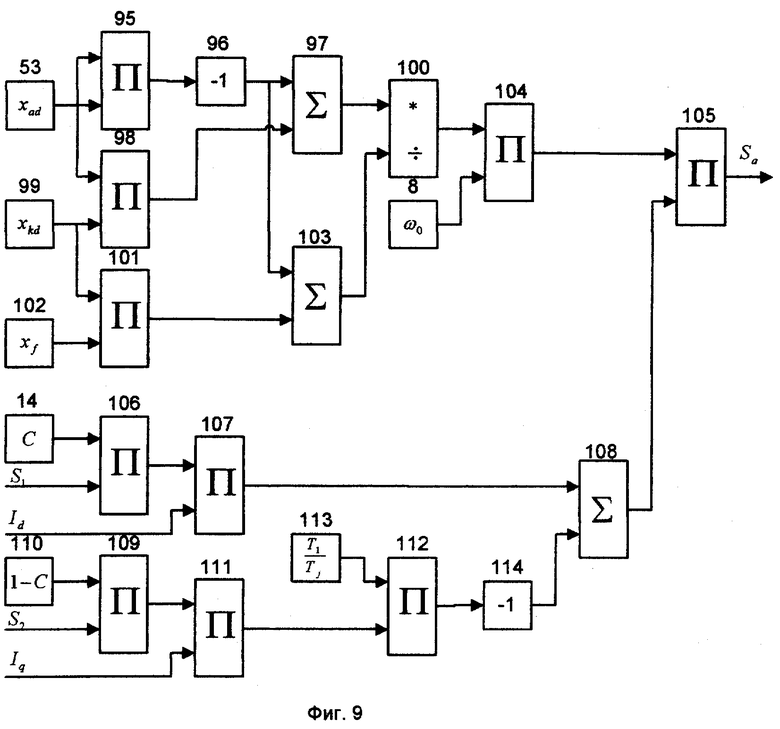
На фиг.9 представлена схема блока формирования сигнала Sa. На оба входа умножителя 95 подается константа хad с выхода блока 53. Выход умножителя 95 связан с входом усилителя 96. Сигнал с выхода усилителя 96 подается на первый вход сумматора 97. На первый вход умножителя 98 подается константа хad с выхода блока 53, на второй - константа хkd с выхода блока 99. Выход умножителя 98 связан со вторым входом сумматора 97. Формируемый на выходе сумматора 97 сигнал подается на вход "делимое" блока 100. На первый вход усилителя 101 подается константа хkd с выхода блока 99, на второй - константа xf с выхода блока 102. Выходной сигнал умножителя 101 подается на второй вход сумматора 103. На первый вход сумматора 103 подается выходной сигнал усилителя 96. Формируемый на выходе сумматора 103 сигнал подается на вход "делитель" блока 100. Выход блока 100 связан с первым входом умножителя 104. На второй вход умножителя 104 подается синхронная угловая частота ω0 с выхода блока 8. Выходной сигнал умножителя 104 подается на первый вход умножителя 105.
На первый вход умножителя 106 подается константа С с выхода блока 14, на второй - сигнал S1. Выход умножителя 106 связан с первым входом умножителя 107. На второй вход умножителя 107 подается сигнал Id. Выходной сигнал умножителя 107 подается на первый вход сумматора 108. На первый вход умножителя 109 подается константа (1-C) с выхода блока 110, на второй - сигнал S2. Выход умножителя 109 связан с первым входом умножителя 111. На второй вход умножителя 111 подается сигнал Iq. Выход умножителя 111 связан со вторым входом умножителя 112. На первый вход умножителя 112 подается константа  с выхода блока 113. Выходной сигнал умножителя 112 подается на вход усилителя 114. Сигнал с выхода усилителя 114 подается на второй вход сумматора 108. Выход сумматора 108 связан со вторым входом умножителя 105. На выходе умножителя 105 формируется сигнал Sa.
с выхода блока 113. Выходной сигнал умножителя 112 подается на вход усилителя 114. Сигнал с выхода усилителя 114 подается на второй вход сумматора 108. Выход сумматора 108 связан со вторым входом умножителя 105. На выходе умножителя 105 формируется сигнал Sa.
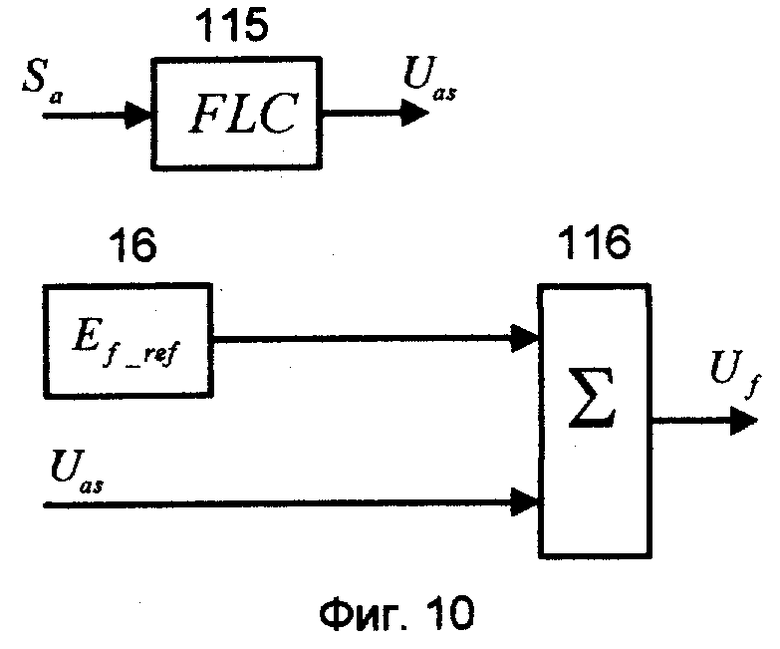
На фиг.10 представлена схема блоков формирования сигналов Uas и Uf. На вход нечеткого контроллера 115 подается сигнал Sa. На выходе нечеткого контроллера 115 формируется сигнал Uas. На первый вход сумматора 116 подается константа Ef_ref с выхода блока 16, на второй - сигнал Uas с выхода нечеткого контроллера 115. На выходе сумматора формируется сигнал управления возбудителем Uf.
Нечеткий контроллер 115 вычисляет значение сигнала Uas. На фиг.11 и 12 представлены диаграммы его входной и выходной лингвистических переменных. Нечеткие правила, определяющие значение выходной переменной, могут иметь, например, следующий вид:
R1:If Sa=N then Uas=P;
R2:If Sa=Z then Uas=Z;
R3:If Sa=P then Uas=N;
На фиг.13 приведен пример вычисления значения выходной переменной Uas при текущем значении входной переменной Sa=-0.7.
При реализации способа с применением вычислительной техники блок-схема алгоритма функционирования может быть представлена в виде, приведенном на фиг.14. После предварительного вычисления начальных значений переменных θ, ψkd и ψkq циклически исполняется последовательность следующих операций: на этапе 1 (фиг.14) по измеренным текущим значениям тока статора I и угла ϕ вычисляются значения активной и реактивной составляющих тока статора Ia и Ir; на этапе 2 вычисляются значения токов Id и Iq; на этапе 3 вычисляются значения переменных Еd и Еq; на этапе 4 вычисляется величина внутреннего угла θ и его производных и ; на этапе 5 вычисляется значение реактивной мощности Q; на этапе 6 вычисляется значение Uas; на этапе 7 вычисляется величина выходной переменной регулятора Uf; на этапе 8 производится передача значения Uf в управляемый возбудитель; на этапе 9 проверяется условие окончания циклического режима: при его отсутствии производится возврат к этапу 1, в противном случае процедура останавливается.
Функциональная схема системы возбуждения, управляемая предложенным способом, представлена на фиг.15. Регулятор возбуждения синхронного двигателя 117 содержит блок 1 вычисления активной и реактивной составляющих тока статора, первый вход которого подключен к выходу датчика тока статора 118, второй вход - к датчику угла ϕ 119; первый выход блока 1 связан с третьим входом блока 2 преобразования координат, второй выход блока 1 связан с четвертым входом блока 2 и с первым входом блока 3 вычисления реактивной мощности; первый вход блока 2 связан с первым выходом блока 5 вычисления внутреннего угла машины θ и его производных, второй вход блока 2 связан с выходом датчика напряжения 120; первый выход блока 2 связан с третьим входом блока 4 оценки электродвижущих сил двигателя и с четвертым входом первого формирующего блока 6, второй выход блока 2 связан с четвертым входом блока 4 и с пятым входом блока 6; второй вход блока 3 связан с выходом датчика напряжения 120, выход блока 3 связан с шестым входом блока 6; первый вход блока 4 связан с выходом блока 8 синхронной угловой частоты ω0, второй вход блока 4 связан с выходом датчика тока обмотки возбуждения 121; первый выход блока 4 связан с первым входом блока 5, второй выход блока 4 связан со вторым входом блока 5; первый выход блока 5 связан с первым входом блока 2 и с первым входом блока 6, второй выход блока 5 связан со вторым входом блока 6, третий выход блока 5 связан с третьим входом блока 6; седьмой вход блока 6 связан с выходом блока 9 константы T1, восьмой вход блока 6 связан с выходом блока 10 константы Tj, девятый вход блока 6 связан с выходом блока 11 константы С, десятый вход блока 6 связан с выходом блока 12 константы Qref; выход блока 6 связан со вторым входом второго формирующего блока 7, первый вход блока 7 связан с выходом блока 13 константы Еf_ref; выход блока 7 связан с входом блока 122 управляемого возбудителя; выход блока 122 связан с ротором синхронного двигателя 117 и с входом измерителя тока обмотки возбуждения 121; статор синхронного двигателя 117 связан с входом измерительного трансформатора 123 тока статора и с входом измерительного трансформатора 124 напряжения статора; выход измерительного трансформатора 123 связан с входом датчика тока статора 118 и первым входом датчика угла ϕ 119; выход измерительного трансформатора 124 связан с входом датчика напряжения 120 и вторым входом датчика угла ϕ 119.
Преимущества предлагаемого способа управления демонстрируют результаты моделирования работы синхронного двигателя типа СТД (СТДП). Кривые изменения тока возбуждения, реактивной мощности и внутреннего угла двигателя при скачкообразном изменении момента нагрузки от номинального значения 1 о.е. до 1,5 о.е. в момент времени около 2 с, возвращении к номинальному значению в момент времени около 14 с, скачкообразном изменении напряжения сети от номинального значения 1 о.е. до 0,7 о.е. в момент времени около 6 с, возвращении к номинальному значению в момент времени около 10 с при оснащении системы нечетким регулятором представлены на фиг.16.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО РЕГУЛИРОВАНИЯ ВОЗБУЖДЕНИЯ СИНХРОННОГО ГЕНЕРАТОРА | 2002 |
|
RU2237346C2 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ДВИГАТЕЛЯ | 2010 |
|
RU2422979C1 |
| Вентильный электропривод | 1987 |
|
SU1439727A1 |
| Электропривод | 1987 |
|
SU1439729A1 |
| Электропривод | 1983 |
|
SU1167688A1 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ ВОЗБУЖДЕНИЯ СИНХРОННОГО ГЕНЕРАТОРА | 2011 |
|
RU2465716C1 |
| Устройство для испытания механической трансмиссии | 1988 |
|
SU1585704A1 |
| Электропривод с синхронным двигателем | 1975 |
|
SU809460A2 |
| ЭЛЕКТРОПРИВОД С СИНХРОННЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2092967C1 |
| Способ управления двигателем двойного питания, выполненным на базе асинхронного двигателя с фазным ротором, и устройство для его осуществления | 1987 |
|
SU1610589A2 |











Изобретение относится к области электротехники и может быть использовано для создания автоматических регуляторов возбуждения мощных синхронных двигателей. Техническим результатом является повышение эффективности подавления качания ротора при изменении нагрузки и напряжения сети и статической устойчивости двигателя во всем диапазоне изменения нагрузки. Регулятор возбуждения для синхронного двигателя содержит измеритель напряжения статора синхронного двигателя, измеритель действующего значения тока статора синхронного двигателя, измеритель коэффициента мощности и измеритель тока ротора. В регулятор дополнительно введены блок вычисления активной и реактивной составляющих тока статора, блок преобразования координат, блок вычисления реактивной мощности, блок оценки электродвижущей силы двигателя, блок оценки внутреннего угла двигателя и его первой и второй производных и первый и второй формирующие блоки. 16 ил.
Регулятор возбуждения синхронного двигателя, содержащий измеритель действующего значения напряжения статора синхронного двигателя, измеритель действующего значения тока статора синхронного двигателя, измеритель угла ϕ и измеритель тока ротора, отличающийся тем, что в регулятор дополнительно введены блок вычисления активной и реактивной составляющих тока статора, блок преобразования координат, блок вычисления реактивной мощности, блок оценки электродвижущей силы двигателя, блок вычисления внутреннего угла двигателя и его первой и второй производных и первый формирующий блок для вычисления напряжения Uas и второй формирующий блок для вычисления напряжения Uf, причем первый вход блока вычисления активной и реактивной составляющих тока статора подключен к выходу измерителя действующего значения тока статора, второй - к выходу измерителя угла ϕ; первый выход блока вычисления активной и реактивной составляющих тока статора связан с третьим входом блока преобразования координат, второй выход связан с четвертым входом блока преобразования координат и с первым входом блока вычисления реактивной мощности двигателя; первый вход блока преобразования координат подключен к первому выходу блока вычисления внутреннего угла двигателя θ, второй вход блока преобразования координат подключен к выходу измерителя действующего значения напряжения статора; первый выход блока преобразования координат связан с третьим входом блока оценки электродвижущей силы двигателя и с четвертым входом первого формирующего блока, второй выход блока преобразования координат связан с четвертым входом блока оценки электродвижущей силы двигателя и с пятым входом первого формирующего блока; второй вход блока вычисления реактивной мощности двигателя подключен к выходу измерителя действующего значения напряжения статора, выход блока вычисления реактивной мощности двигателя связан с шестым входом первого формирующего блока; первый вход блока оценки электродвижущей силы двигателя связан с выходом блока синхронной угловой частоты ω0, второй вход блока оценки электродвижущей силы двигателя подключен к выходу измерителя тока ротора; первый выход блока оценки электродвижущей силы двигателя связан с первым входом блока вычисления внутреннего угла двигателя и его производных, второй выход блока оценки электродвижущей силы двигателя связан со вторым входом блока вычисления внутреннего угла двигателя и его производных; первый выход блока вычисления внутреннего угла двигателя и его производных подключен к первому входу блока преобразования координат и к первому входу первого формирующего блока, второй выход - ко второму входу первого формирующего блока, третий выход связан с третьим входом первого формирующего блока; седьмой вход первого формирующего блока связан с выходом блока константы T1, восьмой вход первого формирующего блока подключен к выходу блока константы Tj, девятый вход формирующего блока подключен к выходу блока константы С, десятый вход первого формирующего блока подключен к выходу блока константы Qref; выход первого формирующего блока связан со вторым входом второго формирующего блока, первый вход которого подключен к выходу блока константы Ef-ref.
| СПОСОБ РЕГУЛИРОВАНИЯ ВОЗБУЖДЕНИЯ СИНХРОННОЙ МАШИНЫ | 1999 |
|
RU2145766C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ВОЗБУЖДЕНИЯ СИНХРОННОГО ГЕНЕРАТОРА | 1991 |
|
RU2011264C1 |
| СПОСОБ И УСТРОЙСТВО РЕГУЛИРОВАНИЯ ВОЗБУЖДЕНИЯ СИНХРОННОГО ГЕНЕРАТОРА | 2002 |
|
RU2237346C2 |
| Способ газового отопления котлов | 1931 |
|
SU25663A1 |
| Способ получения светочувствительных бумаг | 1929 |
|
SU18603A1 |
| Устройство для управления асинхронизированным синхронным компенсатором | 1979 |
|
SU1001304A1 |
| Система автоматического регулирования возбуждения синхронного компенсатора | 1988 |
|
SU1631692A1 |
| US 3859578 А, 07.01.1975 | |||
| Способ очистки газов | 1988 |
|
SU1563740A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Устройство для автоматического управления процессом пиролиза в трубчатой печи | 1975 |
|
SU556481A1 |
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |

