Изобретение относится к электротехнике и может быть использовано для построения систем автоматического управления возбуждением (далее САУВ) синхронных генераторов (далее СГ).
Известен способ автоматического группового управления возбуждением синхронных генераторов электростанции (SU 1778863 C1, опубликовано 30.11.1992), заключающийся в том, что по изменению направления двух последовательно выданных управляющих воздействий фиксируется автоколебательный процесс и производится его демпфирование путем адаптивной перестройки каналов регулирования соответствующих агрегатов вплоть до нормализации режима и завершения процесса с последующим восстановлением исходной настройки системы.
Недостатком известного способа является то, что процесс адаптивной перестройки каналов регулирования производится по факту фиксации колебательного переходного процесса. Данный способ не устраняет колебательный характер переходного процесса, а позволяет лишь более эффективно демпфировать колебания.
Технический результат заявленного способа - определение оптимальной настройки каналов стабилизации АРВ для различных схемно-режимных условий работы генератора, адаптация САУВ для работы с различными типами СГ.
Коэффициенты каналов стабилизации автоматического регулятора возбуждения (далее АРВ) подстраиваются под изменения значений параметров эквивалентной схемы «генератор - линия - шины бесконечной мощности (ШБМ)» и коэффициента усиления регулятора напряжения таким образом, чтобы переходные процессы при возмущающем и управляющем воздействиях имели апериодический или близкий к нему характер. Тем самым решаются следующие задачи:
Под оптимальными коэффициентами или оптимальной настройкой каналов стабилизации подразумеваются такие коэффициенты, при которых переходные процессы таких величин, как напряжение на статоре и скольжение при возмущающем и управляющем воздействиях, близки к апериодическим.
Технический результат способа построения адаптивной системы автоматического управления возбуждением достигается тем, что в способе построения адаптивной системы автоматического управления возбуждением коэффициенты каналов стабилизации автоматического регулятора возбуждения подстраивают под изменения значений параметров эквивалентной схемы «генератор - линия - шины бесконечной мощности (ШБМ)» и коэффициента усиления регулятора напряжения таким образом, чтобы переходные процессы при возмущающем и управляющем воздействиях имели апериодический или близкий к нему характер, в систему управления возбуждением синхронного генератора вводят аппроксиматор, построенный на основе нечеткой логики, общий алгоритм синтеза которого формулируется следующим образом: выбирают базовый генератор, из набора параметров эквивалентной схемы, характеризующих электроэнергетическую систему «генератор - линия - ШБМ», выбирают входные переменные нечеткого аппроксиматора A={А1…Ai}, на компьютерной модели «базовой» ЭЭС «генератор-линия-ШБМ» методом подбора коэффициентов каналов стабилизации K1…Kj для каждого набора входных переменных получают требуемое качество переходных процессов, на основе опорных точек, полученных в результате подбора, формируют экспертную базу знаний нечеткого аппроксиматора, задают тип функций принадлежности входных переменных, выходные переменные, которыми являются коэффициенты каналов стабилизации K1…Kj, дефаззифицируют методом центра тяжести для одноточечных множеств.
Для расчета оптимальной настройки или оптимальных коэффициентов каналов стабилизации в систему управления возбуждением синхронного генератора вводят аппроксиматор, построенный на основе нечеткой логики, общий алгоритм синтеза которого формулируется следующим образом: выбирают «базовый» генератор, из набора параметров эквивалентной схемы, характеризующих электроэнергетическую систему «генератор - линия - ШБМ», выбирают входные переменные нечеткого аппроксиматора, на компьютерной модели «базовой» ЭЭС «генератор-линия-ШБМ» методом подбора коэффициентов каналов стабилизации K1…Kj для каждого набора входных переменных получают требуемое качество переходных процессов, на основе опорных точек, полученных в результате подбора формируют экспертную базу знаний нечеткого аппроксиматора, задают тип функций принадлежности входных переменных, выходные переменные, которыми являются коэффициенты каналов стабилизации K1…Kj, дефаззифицируют методом центра тяжести для одноточечных множеств.
Сравнение предлагаемого способа с прототипом показывает, что он содержит новый признак, а именно нечеткий аппроксиматор, т.е. соответствует критерию новизны. Кроме того, расчет/определение оптимальной настройки каналов стабилизации устраняет недостаток способа прототипа, поскольку характер переходных процессов становится апериодическим или близким к нему.
Аналоги адаптивной САУВ СГ на основе нечеткого аппроксиматора не найдены.
В основе изложенного способа лежит теорема FAT (Fuzzy Approximation Theorem), доказанная в 1993 г. Б. Коско (В. Kosko). Согласно теореме FAT любая математическая система, в том числе и нелинейная, может быть аппроксимирована системой, основанной на нечеткой логике (Круглов В.В., Дли М.И., Голунов Р.Ю. Нечеткая логика и искусственные нейронные сети. М.: Физматлит, 2001, - 221 с.).
Основными системными задачами автоматических регуляторов возбуждения (далее АРВ) синхронного генератора являются:
Поддержание заданного напряжения на шинах генератора.
Демпфирование электромеханических колебаний, вызванных возмущающими и управляющим воздействиями.
Для решения задачи демпфирования электромеханических колебания в состав отечественных АРВ входят каналы стабилизации. В зарубежных АРВ каналы стабилизации выделены в отдельное устройство, называемое системным стабилизатором PSS (Power System Stabilizer). Как отечественные, так и зарубежные АРВ имеют жесткую структуру и строго заданным (неизменяемым в процессе работы) законом регулирования. При таком построении САУВ СГ приходится выбирать компромиссную настройку АРВ, которое обеспечивает приемлемое качество регулирования для большинства режимов. Для обеспечения или сохранения наилучшего качества регулирования при всех схемно-режимных ситуациях требуется изменение коэффициентов каналов стабилизации или параметрическая адаптация.
Согласно методу эквивалентирования (Юрганов А.А., Кожевников В.А. Регулирование возбуждения синхронных генераторов. СПб: «Наука». 1996, - 138 с.), внешнюю по отношению к генератору можно заменить эквивалентной схемой «генератор - линия - шины бесконечной мощности (ШБМ)». Исходя из этого, задача адаптивного управления возбуждением заключается в определении оптимальных коэффициентов каналов стабилизации в зависимости от коэффициента усиления регулятора напряжения и параметров схемы «генератор - линия - ШБМ», при которых переходные процессы по управляющему и возмущающему воздействиям носили бы апериодический или монотонный характер. Поскольку синхронный генератор представляет собой нелинейный объект, то решение задачи определения оптимальных коэффициентов каналов стабилизации аналитическими методами затруднено (невозможно).
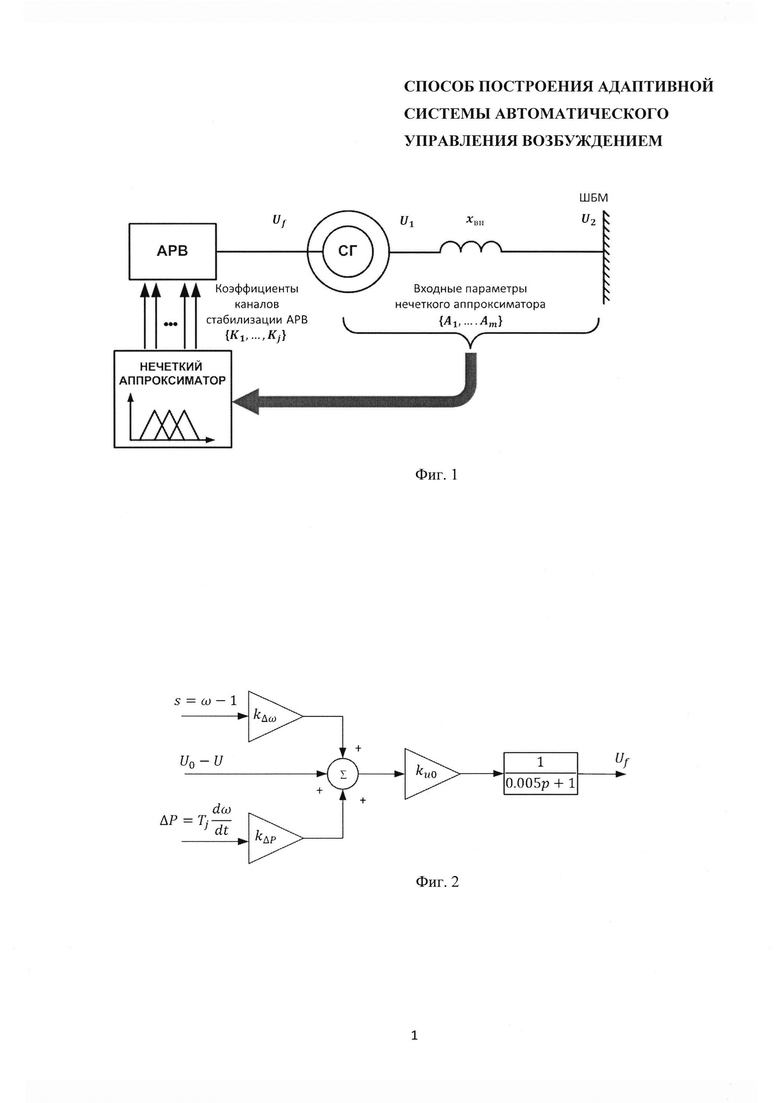
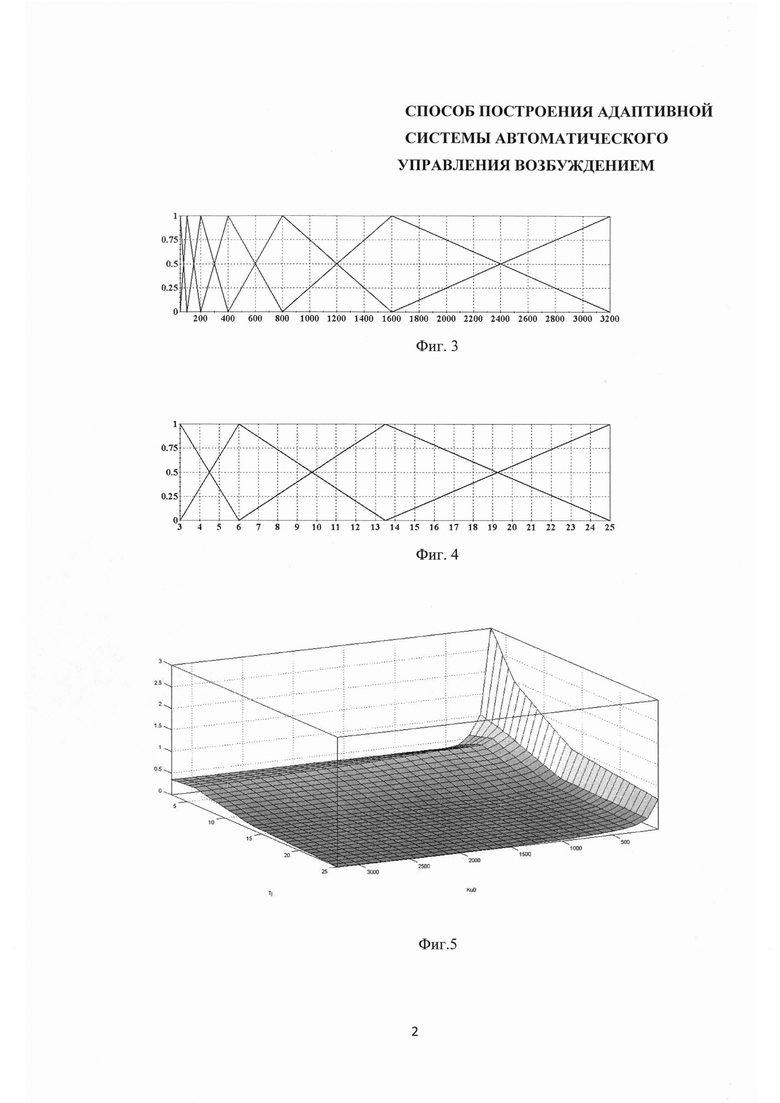
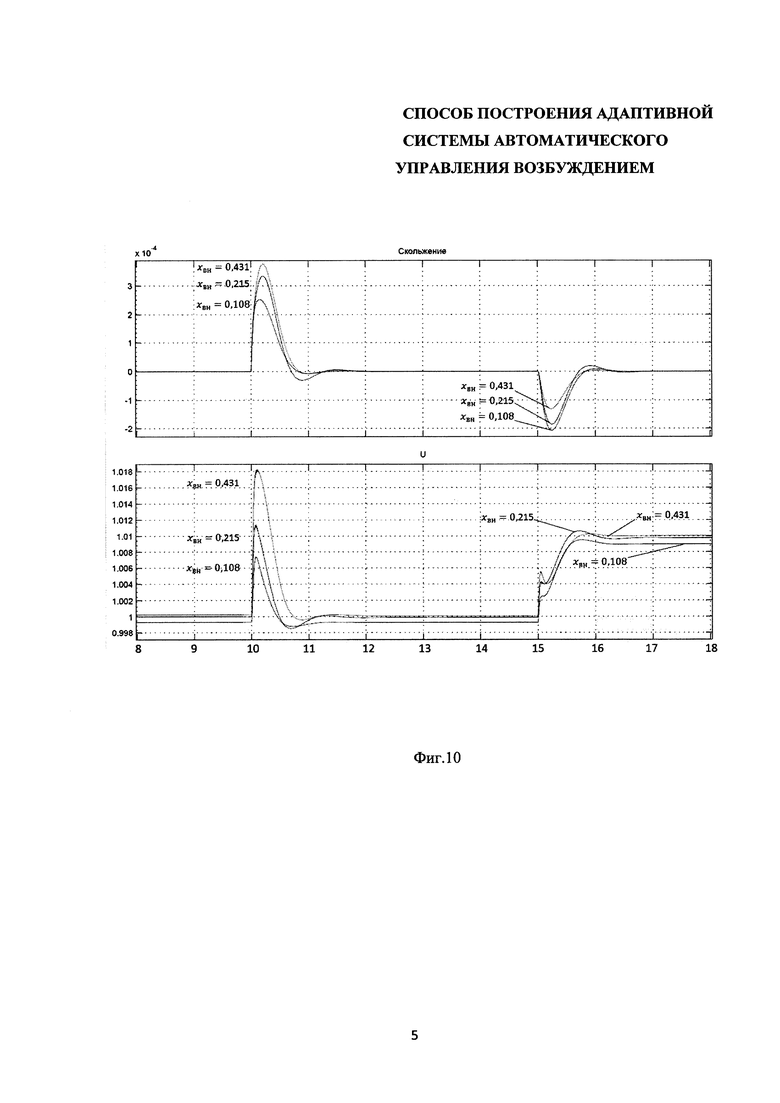
На Фиг. 1 показана функциональная схема адаптивной САУВ; на фиг. 2 - структурная схема АРВ; на фиг. 3 - функции принадлежности для входной переменной ku0; на фиг. 4 - функции принадлежности для входной переменной Tj; на фиг. 5 - поверхность вывода (отклика) для коэффициента kΔР; на фиг. 6 - поверхность вывода (отклика) для коэффициента kΔω; на фиг. 7 - функциональная схема нечеткого аппроксиматора; на фиг. 8 - функциональная схема синтезированной адаптивной САУВ; на фиг. 9 - переходные процессы в ЭЭС с генератором МТ-30-6 ИЭМ при различных значениях внешнего индуктивного сопротивления линии хвн; на фиг. 10 - переходные процессы в ЭЭС с генератором  при различных значениях внешнего индуктивного сопротивления линии хвн.
при различных значениях внешнего индуктивного сопротивления линии хвн.
На фиг. 1 представлена функциональная схема адаптивной САУВ на основе нечеткого аппроксиматора, где приняты следующие обозначения:
АРВ - автоматический регулятор возбуждения,
СГ - синхронный генератор,
хвн - внешнее индуктивное сопротивление линии, соединяющей генератор с шинами бесконечной мощности,
ШБН - шины бесконечной мощности,
 - напряжение возбуждения (выходной сигнал АРВ),
- напряжение возбуждения (выходной сигнал АРВ),
U1 - напряжение на шинах генератора,
U2 - величина напряжения на ШБМ,
{А1,…Aj} - входные параметры нечеткого аппроксиматора,
{K1,…,Kj} - значение коэффициентов усиления каналов стабилизации или выходные параметры нечеткого аппроксиматора.
Предположим, что объект управления «генератор - линия - ШБМ» и система управления характеризуется набором (множеством) параметров Р={Р1…Pm}, где m - общее количество параметров объекта управления и системы управления. Это параметры генератора, величина внешнего индуктивного сопротивления и параметры системы управления (параметры АРВ).
Общий алгоритм синтеза нечеткого аппроксиматора для определения параметров (коэффициентов усиления) каналов стабилизации АРВ СГ формулируется следующим образом:
необходимо выбрать генератор, который будет называться «базовым»;
определить параметры, которые будут использоваться в качестве входных переменных нечеткого аппроксиматора: А={А1…Ai} - набор входных параметров нечеткого аппроксиматора (или множество входных параметров), причем A∈Р, остальные параметры, характеризующие электроэнергетическую систему (ЭЭС) будут называться «базовыми»;
на компьютерной модели «базовой» ЭЭС «генератор-линия-ШБМ» методом подбора коэффициентов каналов стабилизации Kx…Kj для каждого набора входных переменных необходимо получить требуемое качество переходных процессов (j - количество каналов стабилизации, Kj - коэффициент усиления j-го канала стабилизации).
Конечным итогом подбора коэффициентов является массив (набор) опорных точек поверхности или пространства отображения (вывода) нечеткого аппроксиматора:

где i - количество входных переменных;
n - количество опорных точек;
a in - n-е значение i-ой входной переменной;
k11…kjn - значения коэффициентов усиления каналов стабилизации.
Опорные точки, полученные в результате моделирования и оценки качества переходных процессов, являются правилами, определяющими экспертную базу знаний нечеткого аппроксиматора.
Выбор входных переменных (или параметров) нечеткого аппроксиматора обусловлен требованиями, предъявляемыми к системе управления. Если одним из требований является адаптация САУВ к различным типам генераторов, то в качестве входных переменных должны использоваться параметры генератора. Если же необходимо сохранить заданное качество переходных процессов при изменении схемно-режимных условий работы генератора, то в качестве входных переменных могут применяться величина внешнего индуктивного сопротивления или величина напряжения на ШБМ, величины активной и реактивной мощностей. В общем случае число входных сигналов нечеткого ядра аппроксиматора может быть любым, но при этом необходимо помнить, что количество правил экспертной базы или количество опорных точек поверхности нечеткого аппроксиматора экспоненциально зависит от числа входных переменных. Соответственно, в качестве входных сигналов нечеткого аппроксиматора должны выбираться такие переменные, которые оказывают наибольшее влияние на качество переходных процессов. Иначе этап формирования массива опорных точек или экспертной базы будет сопряжен с большим количеством итераций при моделировании.
Экспертная база формируется следующими выражениями:
Правило 1: ЕСЛИ (А1=a11) И (А2=а21) И…И (Ai=ai1), ТО (K1=k11; K2=k21…Kj=kj1)
…
Правило n: 

Далее необходимо задать тип функций принадлежности входных переменных. Поскольку нечеткий аппроксиматор строится на основе модели Сугено 0-ого порядка, то определять тип функций принадлежности выходных переменных не требуется, т.к. они являются синглтонами, т.е. множествами, состоящими из одного элемента. При дефаззификации выходных переменных используется модифицированный вариант метода центра тяжести для одноточечных множеств.
Синтезированный таким образом нечеткий аппроксиматор позволяет осуществлять параметрическую адаптацию АРВ с «жесткой» структурой к изменению параметров схемы «генератор - линия ШБМ» для получения оптимальных переходных процессов.
Внедрение заявляемого способа построения адаптивной САУВ СГ позволит повысить надежность и эффективность работы ЭЭС.
Пример построения адаптивной САУВ СГ.
Рассмотрим применение предложенного способа построения адаптивной САУВ на примере структуры АРВ, представленной на фиг. 2. АРВ имеет пропорциональный регулятор напряжения с коэффициентом усиления ku0 и два стабилизирующих канала: канал стабилизации по отклонению скорости и канал стабилизации по избыточной мощности.
s=ω-1 - скольжение или отклонение угловой скорости от синхронной [о.е.].
 - избыточная мощность [о.е.].
- избыточная мощность [о.е.].
U0 - задание (уставка) напряжения [о.е.].
U - текущее значение [о.е.].
Tj - механическая постоянная энергоблока «турбина - СГ»
ku0 - коэффициент усиления регулятора напряжения [о.е/о.е.].
kΔω - коэффициент, определяющий (показывающий) как соотносятся коэффициент усиления канала стабилизации по отклонению скорости с коэффициентом усиления регулятора напряжения [о.е/о.е.].
kΔР - коэффициент, определяющий (показывающий) как соотносятся коэффициент усиления канала стабилизации по избыточной мощности с коэффициентом усиления регулятора напряжения [о.е/о.е.].
Инерционное звено  учитывает амплтудно-фазовые искажения управляющего сигнала, обусловленные работой тиристорного преобразователя.
учитывает амплтудно-фазовые искажения управляющего сигнала, обусловленные работой тиристорного преобразователя.
Параметры базовой ЭЭС представлены в таблице 1.
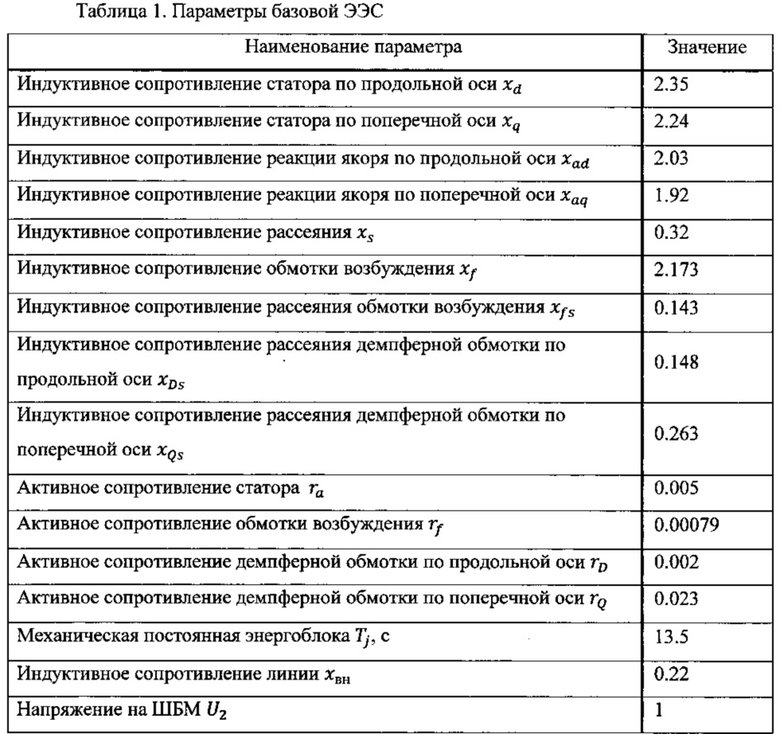
В качестве входных переменных нечеткого аппроксиматора выбираем коэффициент усиления регулятора напряжения ku0 и механическую постоянную СГ Tj.
Методом компьютерного моделирования для каждой пары входных переменных (ku0n, Tjl) были подобраны такие значения kΔωnl и kΔPnl, чтобы переходные процессы по возмущающему и управляющему воздействиям были близки к апериодическим, при этом другие параметры ЭСС «генератор-линия-ШБМ» оставались неизменными. Результаты расчета/подбора опорных точек нечеткого аппроксиматора представлены в таблице 2.
В результате была получена экспертная база знаний, состоящая из 7×4=28 правил следующего вида:
ЕСЛИ 
n - номер множества, описывающего переменную ku0,
n=[1, 2, 3, 4, 5, 6, 7];
l - номер множества, описывающего переменную Tj,
l=[1, 2, 3, 4].
Функции принадлежности к нечетким множествам для фаззификации входных переменных представлены на фиг. 3 и 4.

Агрегирование или определение истинности условий каждого i-го правила экспертной базы знаний выполнено на основе нечеткой конъюнкции (или связке «AND») согласно формуле:

i - номер правила экспертной базы знаний (номер опорной точки);
n - номер нечеткого множества входной переменной ku0;
l - номер нечеткого множества входной переменной Tj.
Коэффициенты активации для каждого правила равны 1. Дефаззификация выполнена методом центра тяжести для одноточечных множеств (синглтонов):

Поверхности вывода (отклика) нечеткого аппроксиматора представлены на фигурах 5 и 6.
Входная переменная Tj характеризует скорость протекания электромеханических процессов, коэффициент ku0 определяет точность регулирования напряжения. Необходимы дополнительные параметры, которые характеризовали бы скорость протекания электромагнитных процессов в самом генераторе, а также внешнюю по отношению к генератору сеть. Поскольку само ядро нечеткого аппроксиматора выполнено двухвходовым, то эти дополнительные параметры должны каким-то образом воздействовать либо на входные переменные, либо на выходные переменные, т.е. на результат аппроксимации.
Экспериментальным путем на компьютерной модели ЭСС «генератор-линия-ШБМ» было установлено, что при увеличении внешнего индуктивного сопротивления линии хвн для получения апериодических переходных процессов необходимо увеличивать коэффициент канала стабилизации kΔω, не изменяя при этом других параметров АРВ, и наоборот, при уменьшении хвн коэффициент kΔω должен уменьшаться. Тогда для учета внешнего индуктивного сопротивления линии хви коэффициент k'Δω, рассчитанный нечетким аппроксиматором, скорректируется путем умножения на величину относительного индуктивного сопротивления  :
:

хвн - индуктивное сопротивление линии ЭСС, для которой определяются коэффициенты АРВ;
хвн б=0,22 о.е. - базовое индуктивное сопротивление линии или индуктивное сопротивление линии ЭСС, на основе которой произведен расчет опорных точек поверхности отклика нечеткого аппроксиматора;
k'Δω - коэффициент канала стабилизации по отклонению скорости, рассчитанный нечетким аппроксиматором.
Такая коррекция позволяет сохранить заданное качество переходных процессов при изменении параметров внешней сети, а именно внешнего индуктивного сопротивления линии от 0.2 о.е. и больше.
Увеличить точность расчета коэффициента kΔω для ЭЭС с хвн<0,2 о.е. можно, если выходную коррекцию производить согласно следующему выражению:

Операция max(хвн, 0,2) ограничивает значение хвн величиной 0,2 и позволяет получать апериодические переходные процессы в ЭЭС с малыми значениям хвн.
Влияние параметров генератора, характеризующих скорость протекания электромагнитных процессов, учитывается изменением параметра (величины) ku0, поступающего на вход нечеткого аппроксиматора. В качестве корректирующего коэффициента применяется следующее соотношение:

xad и  - параметры генератора, входящего в состав ЭЭС, для которой производится расчет параметров АРВ;
- параметры генератора, входящего в состав ЭЭС, для которой производится расчет параметров АРВ;
xad б и  - параметры базового генератора, на основе которого произведен расчет опорных точек.
- параметры базового генератора, на основе которого произведен расчет опорных точек.
Скорректированный коэффициент k'u0 определяется следующим выражением:

Необходимо отметить, что скорректированный таким образом коэффициент k'u0 влияет только на расчет параметров каналов стабилизации, т.е. он не будет использоваться как параметр АРВ.
Функциональная схема полученной нечеткой системы определения оптимальных коэффициентов каналов стабилизации АРВ представлена на фиг. 7.
В результате введения входной и выходной коррекций нечеткий аппроксиматор позволяет реализовать параметрическую адаптацию АРВ к изменениям схемы «генератор - линия - ШБМ» с сохранением заданного качества переходных процессов. Функциональная схема синтезированной адаптивной САУВ с нечетким аппроксиматором представлена фиг. 8.
Эффективность параметрической адаптации на основе нечеткого аппроксиматора проверена с помощью компьютерного моделирования с применением пакета программ Matlab фирмы The MathWorks Inc.
Графики переходных процессов при возмущающем и управляющем воздействиях для различных типов генераторов и различных значениях внешнего индуктивного сопротивления линии хвн представлены на фиг. 7 для модельного генератора МТ30-6 (ИЭМ) и на фиг. 8 для гидрогенератора 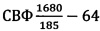 . На верхнем графике показано изменение величины статорного напряжения, на нижнем - изменение скольжения.
. На верхнем графике показано изменение величины статорного напряжения, на нижнем - изменение скольжения.
Начальные условия:
Активная мощность Р=0.6 о.е.
Напряжение на ШБМ U2=0.95 о.е.
Сценарий моделирования:
На 10 секунде осуществляется «наброс» активной мощности ΔР=0.05 о.е. - возмущающее воздействие.
На 15 секунде происходит изменение задания напряжения на AU0=0.01 о.е. - управляющее воздействие.
Переходные процессы, представленные на фиг. 9 и фиг. 10, имеют характер, близкий к апериодическому. Качество переходных процессов не зависит от параметров внешней сети и не зависит от параметров синхронного генератора.
Таким образом, заявляемый способ позволяет осуществлять параметрическую адаптацию АРВ с «жесткой» структурой к изменению параметров схемы «генератор - линия ШБМ» для получения оптимальных переходных процессов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования возбуждения бесщеточного синхронного генератора | 2024 |
|
RU2837996C1 |
| Система определения инерционной постоянной синхронной машины | 2017 |
|
RU2663826C1 |
| СПОСОБ УЛУЧШЕНИЯ ДИНАМИЧЕСКОЙ УСТОЙЧИВОСТИ И ДЕМПФИРОВАНИЯ КОЛЕБАНИЙ ЭЛЕКТРОЭНЕРГЕТИЧЕСКИХ СИСТЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2339144C1 |
| СПОСОБ УПРАВЛЕНИЯ ВОЗБУЖДЕНИЕМ СИНХРОННЫХ ДВИГАТЕЛЕЙ НАСОСНЫХ СТАНЦИЙ | 2024 |
|
RU2839885C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ СИНХРОНИЗИРУЮЩЕЙ МОЩНОСТИ СИНХРОННОЙ МАШИНЫ | 2014 |
|
RU2564539C1 |
| Устройство для управления возбуждением синхронного генератора в распределительной сети переменного тока | 2023 |
|
RU2802730C1 |
| Способ регулирования возбуждения синхронного генератора | 1987 |
|
SU1508311A1 |
| Пневматический адаптивный регулятор с переменной структурой | 1977 |
|
SU742872A1 |
| Способ автоматического регулирования возбуждения синхронных генераторов | 1960 |
|
SU139710A1 |
| Устройство для регулирования возбуждения синхронного генератора | 1986 |
|
SU1376211A1 |


Изобретение относится к электротехнике и может быть использовано для построения систем автоматического управления возбуждением (далее САУВ) синхронных генераторов (далее СГ). Технический результат заявленного способа - определение оптимальной настройки каналов стабилизации АРВ для различных схемно-режимных условий работы генератора, адаптация САУВ для работы с различными типами СГ. Способ построения адаптивной системы автоматического управления возбуждением, заключающийся в том, что коэффициенты каналов стабилизации автоматического регулятора возбуждения подстраивают под изменения значений параметров эквивалентной схемы «генератор - линия - шины бесконечной мощности (ШБМ)» и коэффициента усиления регулятора напряжения таким образом, чтобы переходные процессы при возмущающем и управляющем воздействиях имеют апериодический или близкий к нему характер. 10 ил.
Способ построения адаптивной системы автоматического управления возбуждением заключается в том, что коэффициенты каналов стабилизации автоматического регулятора возбуждения подстраивают под изменения значений параметров эквивалентной схемы «генератор - линия - шины бесконечной мощности (ШБМ)» и коэффициента усиления регулятора напряжения таким образом, чтобы переходные процессы при возмущающем и управляющем воздействиях имели апериодический или близкий к нему характер, отличающийся тем, что в систему управления возбуждением синхронного генератора вводят аппроксиматор, построенный на основе нечеткой логики, общий алгоритм синтеза которого формулируется следующим образом: выбирают базовый генератор, из набора параметров эквивалентной схемы, характеризующих электроэнергетическую систему «генератор - линия - ШБМ», выбирают входные переменные нечеткого аппроксиматора A={A1…Ai}, на компьютерной модели «базовой» ЭЭС «генератор - линия - ШБМ» методом подбора коэффициентов каналов стабилизации K1…Kj для каждого набора входных переменных получают требуемое качество переходных процессов, на основе опорных точек, полученных в результате подбора, формируют экспертную базу знаний нечеткого аппроксиматора, задают тип функций принадлежности входных переменных, выходные переменные, которыми являются коэффициенты каналов стабилизации K1…Kj, дефаззифицируют методом центра тяжести для одноточечных множеств.
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 1996 |
|
RU2109317C1 |
| СПОСОБ АДАПТИВНОГО РЕГУЛИРОВАНИЯ ВОЗБУЖДЕНИЯ СИНХРОННОГО ГЕНЕРАТОРА | 1990 |
|
RU2014724C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 1999 |
|
RU2152067C1 |
| ЛИНЕЙНО-КВАДРАТИЧНЫЙ АППРОКСИМАТОР | 2001 |
|
RU2183032C1 |
| СПОСОБ НАСТРОЙКИ ПАРАМЕТРОВ РЕГУЛЯТОРА ВОЗБУЖДЕНИЯ СИНХРОННОГО ЭЛЕКТРИЧЕСКОГО ГЕНЕРАТОРА | 2012 |
|
RU2498495C1 |
| US 4912381 A, 27.03.1990 | |||
| US 5347445 A, 13.09.1994 | |||
| JP 2002073109 A, 12/03/2002 | |||
| US 2012265367 A1, 18.10.2012 | |||
| US 8868221 B1, 21.10.2014. | |||

