Изобретение относится к области радиолокации и может быть использовано как в традиционной радиолокации, где параметры излучаемого зондирующего сигала совпадают с параметрами отраженного от цели принимаемого сигнала, так и для нелинейной радиолокации, где отраженный от цели принимаемый сигнала является продуктом нелинейного преобразования зондирующего сигала (гармоникой или комбинационным нелинейным продуктом).
Известен по [М.И. Финкельштейн: "Основы радиолокации, Учебник для вузов", издание 2-е, Москва, Радио и связь, 1983] импульсный способ определения дальности в узкополосном импульсном радиолокаторе с согласованным фильтром. Этот способ применим и в нелинейной радиолокации как для одночастотных нелинейных радиолокаторов, так и для комбинационных нелинейных радиолокаторов, что известно по [Hager R. О. Harmonic radar systems for near-ground in foliage nonlinear scatteres // IEEE Transactions on Aerospace and Electron Systems. - 1976. - Vol.2 - No2. - P. 35-39, Ларцов С.В., С.П. Тараканков Определение местоположения нелинейного рассеивателя // Нелинейный мир, 2007, Т. 5, №7-8, С. 469-476].
Импульсный способ определения дальности в узкополосном импульсном радиолокаторе с согласованным фильтром, заключающийся в том, что:
- радиолокатором, состоящим из передатчика и приемника, в направлении цели при помощи передатчика излучается зондирующий сигнал в виде электромагнитной волны, состоящей из узкополосных когерентных простых прямоугольных радиоимпульсов зондирующего сигнала с периодом повторения Т и длительностью т, формирующий, распространяющийся в обратном направлении рассеянный сигнал в виде электромагнитной волны, состоящей из серии из N одинаковых узкополосных когерентных простых прямоугольных радиоимпульсов рассеянного сигнала с одинаковыми начальными фазами, с длительностью τ, с периодом повторения Т, и частотой заполнения ƒРС, для чего, если используется линейный радиолокатор, то зондирующий сигнал излучается в виде серии из N одинаковых узкополосных когерентных простых прямоугольных радиоимпульсов зондирующего сигнала с периодом повторения Т, длительностью τ и частотой заполнения ƒРС, если используется одночастотный нелинейный радиолокатор, то зондирующий сигнал излучается в виде серии из N одинаковых узкополосных когерентных простых прямоугольных радиоимпульсов зондирующего сигнала с периодом повторения Т, длительностью τ и частотой заполнения ƒЗС, при этом ƒРС =2ƒЗС, а если используется комбинационный нелинейный радиолокатор - зондирующий сигнал излучается в виде двух синхронно излучаемых серий из N узкополосных когерентных простых прямоугольных радиоимпульсов зондирующего сигнала с периодом повторения Т, длительностью τ и с разными частотами заполнения ƒЗС1 и ƒЗС1, при ƒРС=ƒЗС1+ƒЗС1,
- при этом передатчик и приемник используемых радиолокаторов синхронизируются, а началом отсчета служит передний фронт первого излучаемого радиоимпульса зондирующего сигнала,
- входными цепями приемника радиолокатора формируется принимаемый сигнал состоящий из шумов входных цепей приемника и серии из N одинаковых узкополосных когерентных простых прямоугольных радиоимпульсов рассеянного сигнала с периодом повторения Т, длительностью τ, частотой заполнения ƒРС и с одинаковыми начальными фазами,
- в приемнике осуществляется перемножение принимаемого сигнала с непрерывным сигналом гетеродина с частотой ƒГ и последующим выделением сигнала промежуточной частоты, состоящего из шумов тракта промежуточной частоты приемника и серии из N узкополосных когерентных простых прямоугольных радиоимпульсов преобразованного сигнала с одинаковыми начальными фазами, с периодом повторения Т, длительностью τ и частотой заполнения ƒПЧ, при этом ƒПЧ =ƒРС - ƒГ,
- при дальнейшей обработке в приемнике сигнал промежуточной частоты разбивается на N временных отрезков с длительностью равной Т, которые последовательно синхронно суммируются, формируя суммированный сигнал длительностью Т,
- этот суммированный сигнал пропускается через согласованный фильтр, согласованный с узкополосным простым прямоугольным радиоимпульсом преобразованного сигнала с длительностью τ и частотой заполнения ƒПЧ, а по положению максимума сигнала на выходе согласованного фильтра судят о дальности до цели.
В узкополосном импульсном радиолокаторе с согласованным фильтром осуществляется квазиоптимальная обработка узкополосных радиоимпульсов рассеянного сигнала, улучшающая соотношение сигнал/шум. Однако задача определения дальности до цели ставится как второстепенная - точностные параметры оценки дальности определяются длительностью τ зондирующего сигнала и не улучшаются при обработке узкополосных радиоимпульсов рассеянного сигнала в приемнике, что и является недостатком способа определения дальности в узкополосном импульсном радиолокаторе с согласованным фильтром.
Исследования показали, что точность Δτ определения временного положения радиоимпульса на шкале времени, пропорциональная точности определения местоположения цели и связана с шириной полосы частотного спектра рассеянного сигнала ΔƒРС, принимаемого приемником. В частности, предложено использовать радиоимпульсы с линейно-частотой модуляцией [Лезин Ю.С. Введение в теорию и технику радиотехнических систем // Москва. Радио и связь. - 1986], для которых длительность выходного радиоимпульса на выходе согласованного с ними сигнала определяется простым соотношением:

В нелинейной радиолокации получены аналогичные результаты, в частности в [В.В. Беляев, Маюнов А.Т., С.Н. Разиньков. Исследование потенциальной точности и разрешающей способности нелинейных радиолокационных станций с линейной частотной модуляцией сигналов // Измерительная техника, 2003, №7, с. 45-47].
Другим путем улучшения точности определения дальности до цели за счет расширения полосы рассеянного сигнала является способ определения дальности в радиолокаторах, использующих зондирующие сигналы с перестройкой частоты от импульса к импульсу, известной например по [Патент РФ 2326402, МКИ7 G 01 S. Способ измерения радиальной скорости воздушной цели в режиме перестройки частоты от импульса к импульсу/Савостьянов В.Ю., Майоров Д.А., Митрофанов Д.Г., Прохоркин А.Г. №2007101537; заявл. 17.01.07; опубл. 10.06.08]. Радиолокаторов, использующих зондирующие сигналы с перестройкой частоты от импульса к импульсу
Способ определения дальности в радиолокаторах, использующих зондирующие сигналы с перестройкой частоты от импульса к импульсу, заключается в том, что
- передатчик и приемник радиолокатора синхронизируются во времени с периодом синхронизации Т, при этом началом отсчета служит передний фронт первого излучаемого радиоимпульса зондирующего сигнала,
- в направлении цели излучается зондирующий сигнал в виде серии из N узкополосных радиоимпульсов зондирующего сигнала с длительностью τ и периодом (Т-τ), при этом центральная частота заполнения n-го радиоимпульса зондирующего сигнала и, соответственно центральная частота заполнения n-го радиоимпульса рассеянного сигнала fРСn меняется дискретно и скачкообразно от импульса к импульсу на заданную величину Δf по определенному как правило линейному закону,
- широкополосным приемником радиолокатора принимается рассеянный от цели сигнал в виде серии из N узкополосных радиоимпульсов рассеянного от цели сигнала с длительностью τ и периодом (Т-τ),
- при этом центральная частота заполнения n-го радиоимпульса рассеянного сигнала fРСn меняется дискретно и скачкообразно от импульса к импульсу на заданную величину Δf по определенному как правило линейному закону,
- в приемнике формируется сигнал промежуточной частоты, путем уменьшения частоты заполнения у всех радиоимпульсов на одинаковую для всех радиоимпульсов величину ΔfПЧ,
- при дальнейшей обработке в приемнике сигнал промежуточной частоты разбивается на N временных отрезков равной длительности величиной Т, которые последовательно синхронно суммируются, формируя суммированный сигнал с длительностью равной Т,
- суммированный сигнал пропускается через согласованный фильтр, согласованный с объединенным радиоимпульсом с общей длительностью Nτ, представляющим из себя результат суммирования серии из N узкополосных радиоимпульсов принимаемого сигнала в виде примыкающих друг к другу радиоимпульсов с длительностью τ и частотой заполнения равной fПЧn = fЗСn - ΔfПЧ,
- а по положению максимума сигнала на выходе согласованного фильтра судят о дальности до цели.
И способ определения дальности в радиолокаторах, использующих зондирующие сигналы с перестройкой частоты от импульса к импульсу и способ определения дальности в радиолокаторах, использующих зондирующие сигналы с линейной частотной модуляцией сигналов, требуют существенного расширения полосы для достижения приемлемых значений точностных параметров оценки дальности до цели. При этом точность оценки дальности до цели в соответствии с (1) не зависит от времени накопления в согласованном фильтре, то есть от числа узкополосных радиоимпульсов рассеянного от цели сигнала. В то же время, соотношение сигнал/шум и связанная с ним вероятность обнаружения цели непосредственно зависят и улучшаются с ростом числа N, то есть числа обрабатываемых узкополосных радиоимпульсов рассеянного от цели сигнала.
В качестве аналога выбран, описанный выше, импульсный способ определения дальности в узкополосном импульсном радиолокаторе с согласованным фильтром, который может быть реализован как для традиционных радиолокаторов, известного по [М.И. Финкельштейн: "Основы радиолокации, Учебник для вузов", издание 2-е, Москва, Радио и связь, 1983], так и для комбинационных нелинейных радиолокаторов, что известно по [Hager R.О. Harmonic radar systems for near-ground in foliage nonlinear scatteres // IEEE Transactions on Aerospace and Electron Systems. -1976. - Vol.2 - No2. - P. 35-39, Ларцов С.В., С.П. Тараканков Определение местоположения нелинейного рассеивателя // Нелинейный мир, 2007, Т. 5, №7-8, С. 469-476].
Недостатком прототипа является низкая точность определения дальности, которая не может быть увеличена путем обработки принимаемого сигнала в приемнике радиолокатора.
Задачей изобретения является создание способа определения дальности до цели, при котором эта точность определения дальности до цели будет расти с увеличением числа обрабатываемых узкополосных радиоимпульсов рассеянного от цели сигнала N, то есть с увеличением времени оптимальной или квазиоптимальной обработки в приемнике радиолокатора. При такой постановке задачи точность определения дальности до цели, зависит как от полосы спектра рассеянного сигнала, так и от времени накопления. Поэтому для улучшения точности определения дальности до цели не обязательно при формировании рассеянного от цели сигнала увеличивать полосу его спектра, можно увеличивать время накопления.
Указанные недостатки прототипа устраняется в предлагаемом способе повышения точности определения дальности в узкополосных радиолокаторах, заключающийся в том, что
- радиолокатором, состоящим из передатчика и приемника, в направлении цели при помощи передатчика излучается в виде электромагнитной волны зондирующий сигнал из узкополосных когерентных простых прямоугольных радиоимпульсов зондирующего сигнала с периодом повторения Т, длительностью τ, формирующий, распространяющийся в обратном направлении рассеянный сигнал в виде электромагнитной волны, состоящей из серии из N одинаковых узкополосных когерентных простых прямоугольных радиоимпульсов рассеянного сигнала с одинаковыми начальными фазами, с периодом повторения Т, длительностью τ и частотой заполнения ƒРС, для чего, если используется линейный радиолокатор, то зондирующий сигнал излучается в виде серии из N одинаковых узкополосных когерентных простых прямоугольных радиоимпульсов зондирующего сигнала с одинаковыми начальными фазами, с периодом повторения Т, длительностью τ и частотой заполнения ƒРС, если используется одночастотный нелинейный радиолокатор, то зондирующий сигнал излучается в виде серии из N одинаковых узкополосных когерентных простых прямоугольных радиоимпульсов зондирующего сигнала с одинаковыми начальными фазами, с периодом повторения Т, длительностью τ и частотой заполнения ƒЗС, при этом ƒРС=2ƒЗС, а если используется комбинационный нелинейный радиолокатор
- зондирующий сигнал излучается в виде двух синхронно излучаемых серий радиоимпульсов с разными частотами заполнения ƒЗС1 и ƒЗС1, каждая из которых состоит из N узкополосных когерентных простых прямоугольных радиоимпульсов зондирующего сигнала с одинаковыми начальными фазами, с периодом повторения Т и длительностью τ, при этом ƒРС=ƒЗС1 + ƒЗС1,
- при этом передатчик и приемник используемых радиолокаторов синхронизируются, а началом отсчета служит передний фронт первого излучаемого радиоимпульса зондирующего сигнала,
- входными цепями приемника радиолокатора формируется принимаемый сигнал состоящий из шумов входных цепей приемника и серии из N одинаковых узкополосных когерентных простых прямоугольных радиоимпульсов рассеянного сигнала с одинаковыми начальными фазами, с периодом повторения Т, длительностью τ и частотой заполнения ƒРС,
- в приемнике осуществляется перемножение принимаемого сигнала с сигналом гетеродина и последующим выделением сигнала промежуточной частоты, состоящего из шумов тракта промежуточной частоты приемника и серии из N узкополосных простых прямоугольных радиоимпульсов преобразованного сигнала с периодом повторения Т и длительностью τ, при этом частота сигнала гетеродина меняется на заданную величину по определенному закону через периоды времени Т, а начальная фаза сигнала гетеродина загуляется в начале первого периода времени Т и при каждом изменении частоты, ко есть в начале нового периода времени Т,
- при дальнейшей обработке в приемнике сигнал промежуточной частоты разбивается на N временных отрезков с длительностью равной (Т-τ), которые последовательно синхронно суммируются, формируя суммированный сигнал,
- этот суммированный сигнал, длительностью (Т-τ) пропускается через согласованный фильтр, согласованный с объединенным радиоимпульсом, который представляет собой радиоимпульс с длительностью Nτ, получаемый путем последовательного соединения во времени всех N узкополосных простых прямоугольных радиоимпульсов в серии из N узкополосных простых прямоугольных радиоимпульсов преобразованного сигнала, при этом начальная фаза у всех радиоимпульсов равна нулю, передний фронт объединенного радиоимпульса совпадает с передним фронтом первого из радиоимпульсов преобразованного сигнала, а задний фронт n-го радиоимпульса преобразованного сигнала совпадает с передним фронтом (n+1)-го узкополосного радиоимпульса преобразованного сигнала,
- а по положению максимума сигнала на выходе согласованного фильтра судят о дальности до цели.
Техническим результатом предлагаемого изобретения является возможность повышения точности в определении дальности путем увеличения числа обрабатываемых узкополосных радиоимпульсов рассеянного от цели сигнала N, то есть времени оптимальной или квазиоптимальной обработки в приемнике радиолокатора.
Сущность предлагаемого изобретения заключается в том, что зондирование ведется сериями из N одночастотных когерентных узкополосных радиоимпульсов. Соответственно на вход приемника поступает тоже серия из N одночастотных когерентных узкополосных радиоимпульсов. Эти радиоимпульсы обрабатываются в приемнике так, что частота заполнения преобразованных радиоимпульсов скачкообразно меняется от импульса к импульсу, при этом существенно расширяется спектр принятого сигнала. При дальнейшей обработке формируется суммированный сигнал из N примыкающих друг к другу радиоимпульсами с разными частотами и нулевыми начальными фазами, который после прохождения через согласованный фильтр позволяет получить разрешение по дальности в N раз лучше, чем у исходного одночастотного радиоимпульса на входе приемника. Так как в конце обработки принимаемого сигнала применяется согласованный фильтр - одновременно максимизируется соотношение сигнал/шум.
Новым является то, что в предлагаемом техническом решении предложен метод синхронной обработки в приемнике принимаемой серии из N одночастотных узкополосных радиоимпульсов, позволяющий получить разрешение по дальности такое же, как при применении широкополосных зондирующих сигналов.
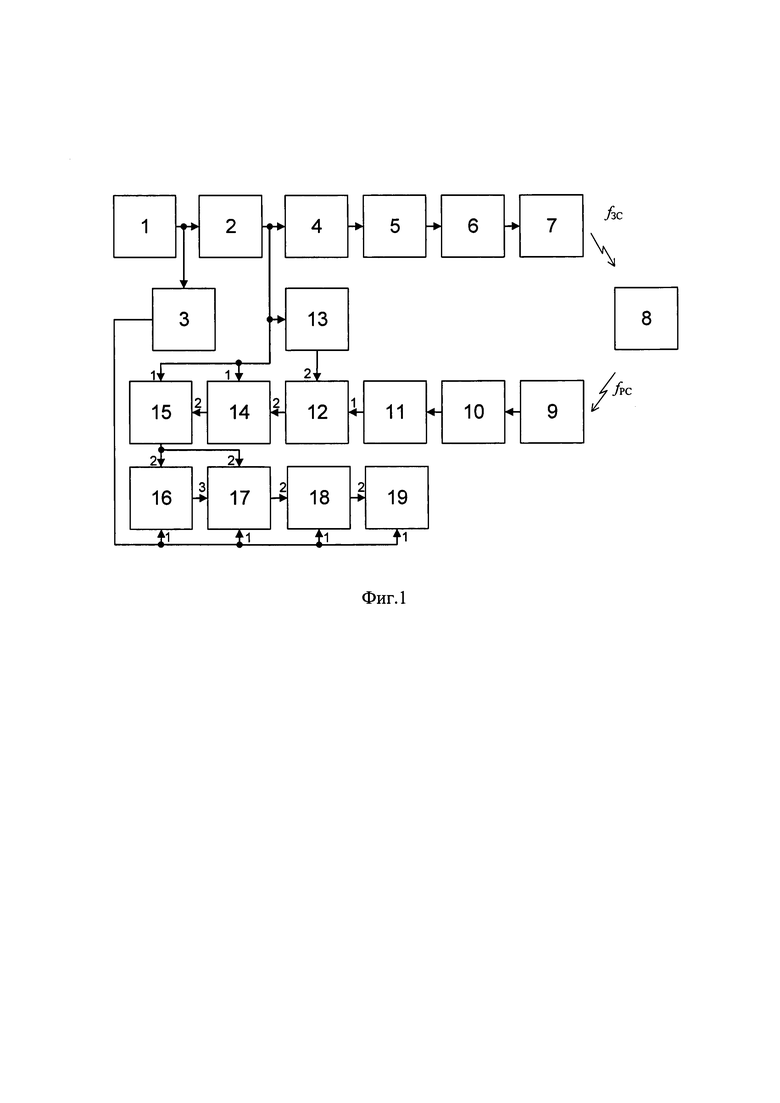
Предлагаемый способ повышения точности определения дальности в узкополосных радиолокаторах может быть реализован в узкополосном нелинейном радиолокаторе, блок-схема которого представлена на фиг. 1. Здесь: 1 - формирователь тактовых видеоимпульсов с периодом τ, 2 - формирователь серий из N видеоимпульсов зондирующего сигнала с периодом Т и длительностью τ, 3 - формирователь тактовых видеоимпульсов с периодом (Т-τ), 4 - формирователь радиоимпульсов зондирующего сигнала, 5 - усилитель зондирующего сигнала, 6 - полосовой фильтр зондирующего сигнала, 7 - антенна зондирующего сигнала, 8 - цель нелинейного радиолокатора - нелинейный рассеиватель, 9 - приемная антенна, 10 - входной полосовой фильтр, 11 - входной усилитель, 12 - смеситель, 13 - перестраиваемый гетеродин, 14 - полосовой фильтр промежуточной частоты с перестройкой полосы, 15 - перестраиваемый усилитель промежуточной частоты, 16 - линия задержки на время (Т-τ), 17 -сумматор, 18 - согласованный фильтр, 19 - автоматизированное рабочее место оператора (индикатор).
Выход формирователя 1 тактовых видеоимпульсов с периодом т соединен со входами формирователя 2 серий из N видеоимпульсов зондирующего сигнала с периодом Т и длительностью τ и формирователя 3 тактовых видеоимпульсов с периодом (Т-τ).
Выход формирователя 2 серий из N видеоимпульсов зондирующего сигнала с периодом Т и длительностью τ соединен со входами формирователя 4 радиоимпульсов зондирующего сигнала, с синхронизирующим входом перестраиваемого гетеродина 13, а так же с первыми синхронизирующими входами полосового фильтра 14 промежуточной частоты с перестройкой полосы и перестраиваемого усилителя 15 промежуточной частоты.
Выход формирователя 3 тактовых видеоимпульсов с периодом (Т-τ) соединен с первыми синхронизирующими входами линии 16 задержки на время (Т-τ), сумматора 17, согласованного фильтра 18, автоматизированного рабочего места 19 оператора (индикатора).
Выход формирователя 4 радиоимпульсов зондирующего сигнала соединен со входом усилителя 5 зондирующего сигнала.
Выход усилителя 5 зондирующего сигнала соединен со входом полосового фильтра 6 зондирующего сигнала.
Выход полосового фильтра 6 зондирующего сигнала соединен со входом антенны 7 зондирующего сигнала.
Антенна 7 зондирующего сигнала облучает электромагнитным зондирующим сигналом цель 8 нелинейного радиолокатора - нелинейный рассеиватель.
Цель 8 нелинейного радиолокатора - нелинейный рассеиватель формирует рассеянный сигнал на частоте второй гармоники зондирующего сигнала в направлении приемной антенны 9.
Выход приемной антенны 9 соединен со входом входного полосового фильтра 10.
Выход входного полосового фильтра 10 соединен со входом входного усилителя 11.
Выход входного усилителя 11 соединен с первым входом смесителя 12.
Выход перестраиваемого гетеродина 13 соединен со вторым входом смесителя 12.
Выход смесителя 12 соединен со вторым входом полосового фильтра 14 промежуточной частоты с перестройкой полосы.
Выход полосового фильтра 14 промежуточной частоты с перестройкой полосы соединен со вторым входом перестраиваемого усилителя 15 промежуточной частоты.
Выход перестраиваемого усилителя 15 промежуточной частоты соединен со вторыми входами линии 16 задержки на время (Т-τ) и сумматора 17.
Выход линии 16 задержки на время (Т-τ) соединен с третьим входом сумматора 17.
Выход сумматора 17 соединен со вторым входом согласованного фильтра 18.
Выход согласованного фильтра 18 соединен со вторым входом автоматизированного рабочего места 19 оператора (индикатора).
Опишем функционирование узкополосного нелинейного радиолокатора на примере использования зондирующего сигнала виде серии из 3-х одинаковых узкополосных когерентных радиоимпульсов с одинаковыми начальными фазами.
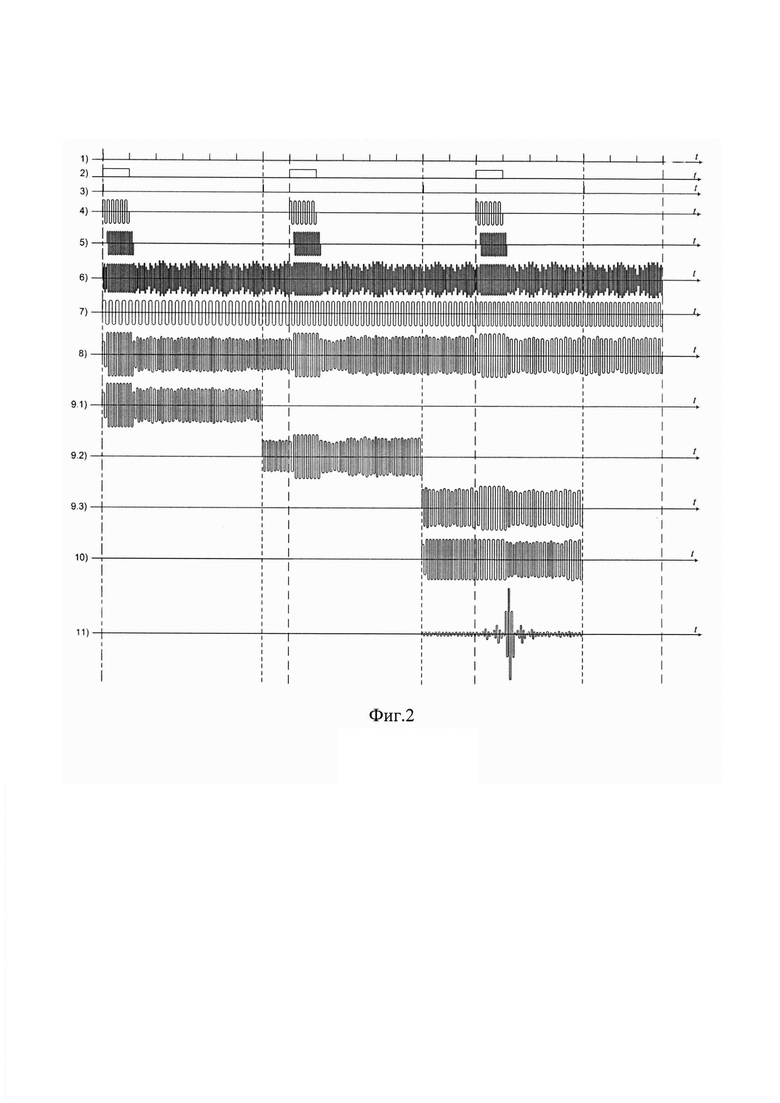
Формирователь 1 тактовых видеоимпульсов с периодом τ генерирует последовательность синхронизирующих тактовых видеоимпульсов с периодом τ, которая изображена на фиг. 2, условная осциллограмма 1.
Формирователь 2 серий из N видеоимпульсов зондирующего сигнала с периодом Т и длительностью τ на основе синхронизирующего сигнала на своем входе формирует на выходе последовательность из 3-х видеоимпульсов зондирующего сигнала с длительностью τ и периодом Т, равным 7τ которая изображена на фиг. 2, условная осциллограмма 2.
Одновременно формирователь 3 тактовых видеоимпульсов с периодом (Т-τ) на основе синхронизирующего сигнала на входе формирует на своем выходе последовательность тактовых видеоимпульсов, синхронизирующих приемник с периодом (Т-τ), равным 6τ, которая изображена на фиг. 2, условная осциллограмма 3.
Формирователь 4 радиоимпульсов зондирующего сигнала на основе временных рамок, заданных входным видеоимпульсом, генерирует на своем выходе зондирующий сигнал виде серии из 3-х одинаковых узкополосных когерентных радиоимпульсов зондирующего сигнала с нулевыми начальными фазами, с периодом повторения Т, равным 7τ, длительностью τ и частотой заполнения ƒЗС, которая изображена на фиг. 2, условная осциллограмма 4.
Зондирующий сигнал в виде серии из 3-х одинаковых узкополосных когерентных радиоимпульсов зондирующего сигнала усиливается в усилителе 5 зондирующего сигнала, фильтруется от побочных нелиненйных продуктов в полосовом фильтре 6 зондирующего сигнала и излучается в виде электромагнитной волны в направлении цели 8 нелинейного радиолокатора -нелинейного рассеивателя.
В цели 8 нелинейного радиолокатора - нелинейном рассеивателе происходит нелинейное преобразование наведенного зондирующего сигнала. В результате на цели 8 нелинейного радиолокатора - нелинейном рассеивателе формируется, распространяющийся в обратном направлении рассеянный сигнал в виде электромагнитной волны, состоящей из серии из 3-х одинаковых узкополосных радиоимпульсов рассеянного сигнала с одинаковыми начальными фазами, с периодом Т, равным 7τ, длительностью τ и частотой заполнения ƒРС, который облучает приемную антенну 9.
Облучающий приемную антенну 9 рассеянный от цели 8 нелинейного радиолокатора - нелинейного рассеивателя рассеянный сигнал в виде серии из 3-х одинаковых узкополосных радиоимпульсов рассеянного сигнала с одинаковыми начальными фазами, с периодом Т, равным 7τ, длительностью τ и частотой заполнения ƒРС, фильтруется во входном полосовом фильтре 10 и поступает на вход входного усилителя 11. Его условная осциллограмма изображена на фиг. 2, условная осциллограмма 5.
Этот рассеянный сигнал в виде серии из 3-х одинаковых узкополосных радиоимпульсов рассеянного сигнала с одинаковыми начальными фазами, с периодом Т, равным 7τ, длительностью τ и частотой заполнения ƒРС, усиливается входным усилителем 11, где к нему подмешиваются шумы. Условная осциллограмма сигнала на выходе входного усилителя 11 изображена на фиг .2, условная осциллограмма 6.
Этот сигнал с выхода входного усилителя 11 поступает на сигнальный вход 1 смесителя 12.
Одновременно с выхода формирователя 2 тактовых видеоимпульсов с периодом (Т-τ) на синхронизирующий вход перестраиваемого гетеродина 13 поступает синхронизирующая последовательность в виде видеоимпульсов с периодом 7τ. На основе синхронизирующего сигнала через период времени 7τ частота перестраиваемого гетеродина дискретно и скачкообразно изменяется на заданную величину по определенному закону, а именно при начальном значении частоты гетеродина ƒГ, она увеличивается каждый период, равный 7τ на величину ΔƒГ. При этом начальные фазы при этом начальная фаза сигнала гетеродина равна нулю в начале первого периода времени равного Т и при каждом следующем изменении частоты через период времени равного 7τ.
Этот сигнал с выхода перестраиваемого гетеродина в виде последовательности из 3-х примыкающих друг к другу радиоимпульсов с длительностью 7τ и частотам возрастающими от начального значения у первого радиоимпульса ƒГ на величину ΔƒГ у каждого следующего радиоимпульса, поступает на гетеродинный вход 2 смесителя 12. Условная осциллограмма этого сигнала гетеродина изображена на фиг. 2, условная осциллограмма 7.
Объединенный радиоимпульс с длительностью 3τ представляет собой последовательно соединенные 3 узкополосных простых прямоугольных радиоимпульса в серии из 3-х узкополосных простых прямоугольных радиоимпульсов преобразованного сигнала. При этом за счет того, что зондирование велось с периодом 7τ, а синхронное суммирование с периодом 6τ, передний фронт объединенного радиоимпульса совпал с передним фронтом первого из радиоимпульсов преобразованного сигнала, задний фронт этого первого из радиоимпульсов преобразованного сигнала совпал с передним фронтом второго радиоимпульса преобразованного сигнала, а задний фронт второго из радиоимпульсов преобразованного сигнала совпал с передним фронтом третьего радиоимпульса преобразованного сигнала.
Так как радиоимпульсы зондирующего сигнала излучались с одинаковой начальной фазой, а фазы всех радиоимпульсов гетеродина в последовательности из 3-х примыкающих друг к другу радиоимпульсов с длительностью 7τ были равны нулю, можно считать нулевыми начальные фазы радиоимпульсов преобразованного сигнала.
Суммированный сигнал пропускается через согласованный фильтр, согласованный с объединенным радиоимпульсом, в результате одновременно происходят рост амплитуды и компрессия объединенного радиоимпульса, входящего в состав суммированного сигнала.
Условная осциллограмма сигнала на выходе согласованного фильтра изображена на фиг. 2, условная осциллограмма 10.
Сигнала на выходе согласованного фильтра индицируется на экране автоматизированного рабочего места 19 оператора (индикатора) по положению максимума сигнала на выходе согласованного фильтра оператор судит о дальности до цели 8 нелинейного радиолокатора - нелинейного рассеивателя.
Предлагаемый способ повышения точности определения дальности в узкополосных радиолокаторах может быть реализован в узкополосном линейном радиолокаторе. В этом случае блок-схема линейного радиолокатора такая же, что и для нелинейного радиолокатора, блок-схема которого представлена на фиг. 1. Отличием является то, что частота зондирующего сигнала ƒЗС совпадает с частотой рассеянного сигнала ƒРС.
При реализации способа повышения точности определения дальности в узкополосных радиолокаторах для комбинационного нелинейного радиолокатора дублируются блоки: 4 - формирователь радиоимпульсов зондирующего сигнала, 5 - усилитель зондирующего сигнала, 6 - полосовой фильтр зондирующего сигнала, 7 - антенна зондирующего сигнала. - Вход дополнительного формирователя 4 радиоимпульсов зондирующего сигнала подключается к выходу формирователя 2 серий из N видеоимпульсов зондирующего сигнала с периодом Т и длительностью τ. Дополнительные формирователь 4 радиоимпульсов зондирующего сигнала, усилитель 5 зондирующего сигнала, полосовой фильтр 6 зондирующего сигнала, антенна 7 зондирующего сигнала формируют тракт второго зондирующего сигнала и подключаются как и для первого тракта зондирующего сигнала последовательно. В пространство в направлении цели одновременно и синхронно излучается два зондирующих сигнала с частотами заполнения радиоимпульсов ƒЗС1 и ƒЗС1, принимаемый рассеянный сигнал является их комбинационным нелинейным продуктом.
Изменений в состав и режимы работы приемника не требуется.
Для реализации предлагаемого технического решения могут быть использованы стандартные блоки и приборы, выпускаемые в настоящее время промышленностью, а также описанные в литературе.
Каналы передатчиков узкополосных линейного радиолокатора, одночастотного нелинейного радиолокатора, комбинационного нелинейного радиолокатора традиционны и освоены промышленностью.
Схема построения передающего канала линейного радиолокатора описана например в Финкелыптейн М.И. Основы радиолокации: Учебник для вузов. - 2-е изд. перераб. и доп.- М.: Радио и связь, 1983.-536 с.ил.
Канал передатчика узкополосного одночастотного нелинейного радиолокатора может быть выполнен аналогично выпускаемы промышленностью нелинейным радиолокаторам "Лорнет-36", "NR-900".
Канал передатчиков узкополосного комбинационного нелинейный радиолокатора выполняется как два параллельных канала узкополосного одночастотного нелинейного радиолокатора, либо может быть выполнен аналогично выпускаемому промышленностью нелинейному радиолокатору "Циклон - М2Ч".
Кроме того, для канала передатчика может быть использовано стандартное промышленное оборудование: СВЧ генератор типа Г4-154 в качестве формирователя 4 радиоимпульсов зондирующего сигнала; в качестве усилителя 5 зондирующего сигнала - мощный широкополосный СВЧ-усилитель типа MS0082540, в качестве антенны 7 зондирующего сигнала -измерительная антенна типа П6-33.
Возможным объектом поиска - то есть нелинейным рассивателем могут выступать мины с электронными взрывателями, описанные в [Г.Н. Щербаков Средства обнаружения управляемых взрывных устройств. Специальная техника, 2000, №5 с. 40-43].
Антенна 9 принимаемого сигнала, как и Антенна 7 зондирующего сигнала могут быть изготовлены по [Кочержевский Г.Н. Антенн-фидерные устройства. - М.: Связь, 1972].
Полосовой фильтр 10 принимаемого сигнала, полосовой фильтр 6 зондирующего сигнала могут быть изготовлены по [В.П. Леонченко, А.Л. Фельдштейн, Л.А. Шепелянский Расчет полосковых фильтров на встречных стержнях. Справочник. Москва: Издательство «Связь», 1975].
В качестве Усилителя 11 принимаемого сигнала может быть применен стандартный малошумящий усилитель MAHW001040-03 фирмы МИКРАН.
Смеситель 12 может быть изготовлен по [Сазонов Д.М., Гридин А.Н., Мишустин Б.А. Устройства СВЧ. -М.: Высшая школа, 1981 -295 с].
В качестве Гетеродина 13 может быть использован измерительный высокочастотный генератор AKHTI-7SG382.
Сумматор 15, Линия задержки 16 на период (Т-τ), Согласованный фильтр 17 могут быть выполнены на основе сигнального процессора по [А.И. Тяжев; В.Г. Иванова Цифровая обработка сигналов и сигнальные процессоры: учеб. пособие - Самара: ИУНЛ ПГУТИ, 2008.- 307 с. - URL: https://rucont.ru/efd/278729] в виде цифрового блока обработки сигналов.
Полосовой фильтр 14 промежуточной частоты с перестройкой полосы может быть выполнен на основе сигнального процессора по [А.И. Тяжев; В.Г. Иванова Цифровая обработка сигналов и сигнальные процессоры: учеб. пособие - Самара: ИУНЛ ПГУТИ, 2008.- 307 с. - URL: https://rucont.ru/efd/278729].
В качестве автоматизированного рабочего места оператора 19 (индикатора) может быть использован персональный компьютер с промышленным интерфейсом.
Формирователь 1 тактовых видеоимпульсов с периодом τ, формирователь 2 серий из N видеоимпульсов зондирующего сигнала с периодом Т и длительностью τ, формирователь 3 тактовых видеоимпульсов с периодом (Т-τ), могут быть выполнены на основе стандартный логических микросхем по [И.В. Малышев, Н.В. Паршина Схемотехника импульсных электронных средств. Учебное пособие. Ростов-на-Дону - Таганрог Издательство Южного федерального университета 2017], либо на основе сигнального процессора по [А.И. Тяжев; В.Г. Иванова Цифровая обработка сигналов и сигнальные процессоры: учеб. пособие - Самара: ИУНЛ ПГУТИ, 2008.- 307 с. - URL: https://rucont.ru/efd/278729] в виде цифрового блока синхронизации сигналов.
Таким образом, предлагаемое техническое решение соответствует критерию новизны и может быть реализовано на современном уровне техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения координат нелинейного рассеивателя комбинационным радиолокатором | 2024 |
|
RU2839938C1 |
| Способ повышения точности определения дальности до нелинейного рассеивателя при помощи нелинейного радиолокатора, использующего линейно-частотно-модулированные зондирующие сигналы | 2024 |
|
RU2830970C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОДНОКОНТУРНЫХ ПАРАМЕТРИЧЕСКИХ РАССЕИВАТЕЛЕЙ | 2009 |
|
RU2413242C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ПАРАМЕТРИЧЕСКИХ РАССЕИВАТЕЛЕЙ | 2009 |
|
RU2408033C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДВУХКОНТУРНЫХ ПАРАМЕТРИЧЕСКИХ РАССЕИВАТЕЛЕЙ | 2010 |
|
RU2455659C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ШИРОКОПОЛОСНЫХ ПАРАМЕТРИЧЕСКИХ РАССЕИВАТЕЛЕЙ | 2013 |
|
RU2532258C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МАРКЕРОВ - ПАРАМЕТРИЧЕСКИХ РАССЕИВАТЕЛЕЙ | 2010 |
|
RU2441253C1 |
| СПОСОБ И УСТРОЙСТВО МАРКИРОВКИ ОБЪЕКТОВ ПРИ ПОМОЩИ ЭЛЕКТРОННОГО НОМЕРА-ПЛОМБЫ, ОСУЩЕСТВЛЯЮЩЕЙ ИНФОРМАЦИОННЫЙ ОБМЕН СО СЧИТЫВАЮЩИМ УСТРОЙСТВОМ С ИСПОЛЬЗОВАНИЕМ СЕКРЕТНОГО КОДИРОВАНИЯ НА ОСНОВЕ АСИММЕТРИЧНЫХ КЛЮЧЕЙ | 2009 |
|
RU2408896C1 |
| ПАРАМЕТРИЧЕСКИЙ РАССЕИВАТЕЛЬ - МАРКЕР С НЕЛИНЕЙНЫМ ФОРМИРОВАНИЕМ СИНХРОСИГНАЛОВ | 2011 |
|
RU2507537C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ, МАРКИРОВАННЫХ ПАРАМЕТРИЧЕСКИМИ РАССЕИВАТЕЛЯМИ | 2011 |
|
RU2487366C2 |
Изобретение относится к области радиолокации и может быть использовано как в традиционной радиолокации, так и для нелинейной радиолокации. Техническим результатом является повышение точности в определении дальности путем увеличения числа обрабатываемых узкополосных радиоимпульсов рассеянного от цели сигнала N, то есть времени оптимальной или квазиоптимальной обработки в приемнике радиолокатора. В заявленном способе ведется зондирование, на вход приемника поступает рассеянный сигнал в виде серии из N одночастотных узкополосных когерентных радиоимпульсов с одинаковыми начальными фазами. Эти радиоимпульсы преобразуются в приемнике так, что частота заполнения преобразованных радиоимпульсов скачкообразно меняется от импульса к импульсу, при этом существенно расширяется спектр принятого сигнала. При дальнейшей обработке формируется суммированный сигнал из N примыкающих друг к другу радиоимпульсов с разными частотами, который после прохождения через согласованный фильтр позволяет получить разрешение по дальности в N раз лучше, чем у исходного одночастотного радиоимпульса на входе приемника. Так как в конце обработки принимаемого сигнала применяется согласованный фильтр, одновременно максимизируется соотношение сигнал/шум. Новым является то, что предложен метод обработки в приемнике принимаемого рассеянного сигнала в виде серии из N когерентных простых радиоимпульсов с одинаковыми начальными фазами, позволяющий получить разрешение по дальности такое же, как при применении широкополосных зондирующих сигналов. 2 ил.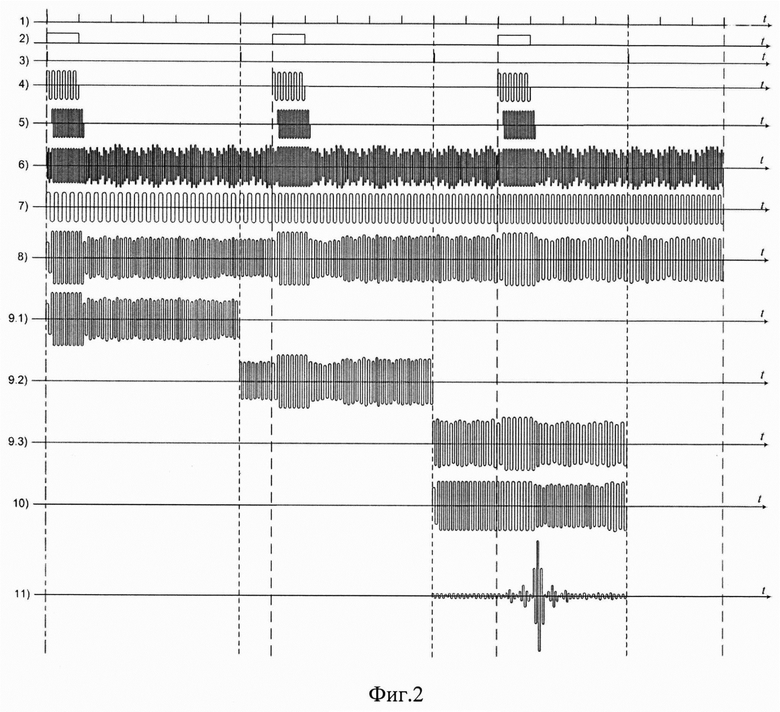
Способ повышения точности определения дальности в узкополосных радиолокаторах, заключающийся в том, что радиолокатором, состоящим из передатчика и приемника, в направлении цели при помощи передатчика излучается в виде электромагнитной волны зондирующий сигнал из узкополосных когерентных простых прямоугольных радиоимпульсов зондирующего сигнала с периодом повторения Т, длительностью τ, формирующий распространяющийся в обратном направлении рассеянный сигнал в виде электромагнитной волны, состоящей из серии из N одинаковых узкополосных когерентных простых прямоугольных радиоимпульсов рассеянного сигнала с одинаковыми начальными фазами, с периодом повторения Т, длительностью τ и частотой заполнения ƒPC, для чего, если используется линейный радиолокатор, то зондирующий сигнал излучается в виде серии из N одинаковых узкополосных когерентных простых прямоугольных радиоимпульсов зондирующего сигнала с одинаковыми начальными фазами, с периодом повторения Т, длительностью τ и частотой заполнения ƒPC, если используется одночастотный нелинейный радиолокатор, то зондирующий сигнал излучается в виде серии из N одинаковых узкополосных когерентных простых прямоугольных радиоимпульсов зондирующего сигнала с одинаковыми начальными фазами, с периодом повторения Т, длительностью τ и частотой заполнения ƒЗС, при этом ƒPC=2ƒЗС, а если используется комбинационный нелинейный радиолокатор, зондирующий сигнал излучается в виде двух синхронно излучаемых серий радиоимпульсов с разными частотами заполнения ƒЗС1 и ƒЗС1, а ƒPC=ƒЗС1+ƒЗС1, при этом каждая серия состоит из N узкополосных когерентных простых прямоугольных радиоимпульсов зондирующего сигнала с одинаковыми начальными фазами, с периодом повторения Т и длительностью τ, при этом передатчик и приемник используемых радиолокаторов синхронизируются, а началом отсчета служит передний фронт первого излучаемого радиоимпульса зондирующего сигнала, входными цепями приемника радиолокатора формируется принимаемый сигнал, состоящий из шумов входных цепей приемника и серии из N одинаковых узкополосных когерентных простых прямоугольных радиоимпульсов рассеянного сигнала с одинаковыми начальными фазами, с периодом повторения Т, длительностью τ и частотой заполнения ƒPC, в приемнике осуществляется перемножение принимаемого сигнала с сигналом гетеродина и последующим выделением сигнала промежуточной частоты, состоящего из шумов тракта промежуточной частоты и серии из N узкополосных простых прямоугольных радиоимпульсов преобразованного сигнала с периодом повторения Т и длительностью τ, при дальнейшей обработке в приемнике сигнал промежуточной частоты разбивается на N временных отрезков равной длительности, которые последовательно синхронно суммируются, формируя суммированный сигнал, этот суммированный сигнал пропускается через согласованный фильтр, а по положению максимума сигнала на выходе согласованного фильтра судят о дальности до цели, отличающийся тем, что при преобразовании принимаемого сигнала в сигнал промежуточной частоты частота сигнала гетеродина меняется на заданную величину по определенному закону через периоды времени, равные Т, при этом сигналы гетеродина генерируются так, что начальные фазы сигналов гетеродина равны нулю в начале первого периода времени, равного Т, и при каждом изменении частоты в начале периода времени, равного Т, при дальнейшей обработке в приемнике сигнал промежуточной частоты разбивается на N временных отрезков с длительностью, равной (Т-τ), для последовательного синхронного суммирования, формируя суммированный сигнал длительностью (Т-τ), который пропускается через согласованный фильтр, согласованный с объединенным радиоимпульсом, а объединенный радиоимпульс представляет собой радиоимпульс с длительностью Nτ, получаемый путем последовательного соединения во времени всех N узкополосных простых прямоугольных радиоимпульсов в серии из N узкополосных простых прямоугольных радиоимпульсов преобразованного сигнала, при этом начальная фаза у всех радиоимпульсов равна нулю, передний фронт объединенного радиоимпульса совпадает с передним фронтом первого из радиоимпульсов преобразованного сигнала, а задний фронт n-го радиоимпульса преобразованного сигнала совпадает с передним фронтом (n+1)-го радиоимпульса преобразованного сигнала.
| СПОСОБ ОБНАРУЖЕНИЯ ПАРАМЕТРИЧЕСКИХ РАССЕИВАТЕЛЕЙ | 2009 |
|
RU2408033C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ВОЗДУШНОЙ ЦЕЛИ В РЕЖИМЕ ПЕРЕСТРОЙКИ ЧАСТОТЫ ОТ ИМПУЛЬСА К ИМПУЛЬСУ | 2007 |
|
RU2326402C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МАРКЕРОВ - ПАРАМЕТРИЧЕСКИХ РАССЕИВАТЕЛЕЙ | 2010 |
|
RU2441253C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ | 1992 |
|
RU2032915C1 |
| БАБАНОВ Н.Ю | |||
| О когерентном накоплении ответных сигналов от параметрических рассеивателей // Вестник Нижегородского университета им | |||
| Н.И | |||
| Лобачевского, 2011, N 6 (1), с | |||
| Машина для разделения сыпучих материалов и размещения их в приемники | 0 |
|
SU82A1 |
| US 2016011300 A1, 14.01.2016 | |||
| US 5191343 A, 02.03.1993. | |||

