Изобретение относится к области нелинейной радиолокации использующей сигнал, рассеянный нелинейным рассеивателем на частоте одной из гармоник зондирующего сигнала, в качестве принимаемого полезного сигнала. Нелинейный рассеиватель - это обобщённое название целей в нелинейной радиолокации. Нелинейным рассеивателем называется класс объектов, содержащих в своей конструкции или в своем составе нелинейные элементы, присоединенные к проводникам. В результате воздействия зондирующего сигнала на нелинейный рассеиватель по указанным проводникам протекают токи на частоте зондирующего сигнала, в результате на нелинейных элементах наводятся ЭДС на частоте зондирующего сигнала. В силу нелинейного характера вольт-амперных характеристик нелинейных элементов, протекающие через них токи искажаются, в результате в спектре данных токов появляются новые спектральные составляющие на частотах гармоник или комбинационных составляющих зондирующего сигнала. Эти гармоники или комбинационные составляющие зондирующего сигнала протекая через проводники, присоединённые к нелинейным элементам, переизлучаются в пространство. Появление в спектре отражённого сигнала указанных гармоник или комбинационных составляющих зондирующего сигнала является информационным признаком нахождения в зоне облучения нелинейного радиолокатора нелинейного рассеивателя. Рассеиваемые нелинейным рассеивателем сигналы очень слабые. Поэтому в качестве рабочих принимаемых сигналов используются нелинейные продукты второго или третьего порядков, как самые интенсивные, а для работы нелинейного радиолокатора принципиально предварительное очищение излучаемого зондирующего сигнала от паразитных нелинейных продуктов, и защита приёмника от блокирования зондирующим сигналом путем фильтрации.
Известен по [Переносной детектор нелинейных переходов «NR-900EK»/ Руководство по эксплуатации. ЮТДН 468165003 РЭ. - ЗАО «Группа защиты - ЮТТА»; Интернет-сайт http://www.detektor.ru.; R.O., Hager Harmonic radar systems for near ground in foliage nonlinear scatterers. // IEEE Trans. on Aerospace and Electron Systems. 1976. V.12. № 2. P.230] способ определения нелинейным радиолокатором дальности до нелинейного рассеивателя, заключающийся в том, что:
- нелинейным радиолокатором использующим в качестве принимаемого сигнала n-ю гармонику зондирующего сигнала, в направлении нелинейного рассеивателя излучаются, очищенные от побочных нелинейных продуктов, радиоимпульсы зондирующего сигнала в виде последовательности из M одинаковых радиоимпульсов зондирующего сигнала с периодом Т и длительностью τ , и частотой заполнения равной fЗС , при этом, передний фронт первого радиоимпульса зондирующего сигнала является стартом для работы всех систем нелинейного радиолокатора,
- одновременно приёмником, настроенным на частоту (nfЗС), принимается принимаемый сигнал, состоявший из смеси шума и последовательности из M одинаковых переизлучаемых нелинейным рассеивателем радиоимпульсов рассеянного сигнала с периодом Т, длительностью τ и частотой заполнения равной (nfЗС),
- принимаемый сигнал преобразуется в приемнике в M реализаций сигнала промежуточной частоты с длительностью реализации Т, являющейся периодом для всех систем приемника нелинейного радиолокатора, при этом каждая реализация сигнала промежуточной частоты содержит шум и радиоимпульс преобразованного сигнала, имеющий длительность τ и частоту заполнения равную fПС,
- все M реализаций сигнала промежуточной частоты в приемнике синхронно суммируются с периодом Т, при этом формируется результирующий сигнал с длительностью равной Т, состоящий из шума и суммированного радиоимпульса с длительностью τ и частотой заполнения fПС,
- результирующий сигнал пропускается через согласованный фильтр, согласованный с суммированным радиоимпульсом, имеющим длительность τ и частоту заполнения fПС,
- по значению времени t, соответствующему положению основного максимума в сигнале на выходе согласованного фильтра оценивают дальность до цели, а по длительности Δt основного максимума сигнала на выходе согласованного фильтра оценивают точность определения дальности до нелинейного рассеивателя.
Описанный выше способ выбран аналогом. Недостатком способа - аналога является низкая точность в определении дальности до нелинейного рассивателя: на выходе согласованного фильтра, полезный сигал выходит за уровень шумов, однако длительность Δt основного максимума сигнала на выходе согласованного фильтра больше, чем длительность радиоимпульса зондирующего сигнала τ.
Этот недостаток преодолен в способе определения дальности до нелинейного рассеивателя при помощи нелинейного радиолокатора использующего линейно-частотно-модулированные зондирующие сигналы, известного по [Беляев В.В., Маюнов А.Т., Разиньков С.Н. Оценка характеристик обнаружения объектов средствами нелинейной радиолокации при использовании ЛЧМ сигналов. // Зарубежная радиоэлектроника: Успехи современной радиоэлектроники, 2003; Н.Ю. Бабанов, В.В. Дмитриев, И.Н. Замятина О применении ЛЧМ-зондирующих сигналов в нелинейной радиолокации // Вестник НГИЭИ (технические науки), 2018, №3(82), Стр. 18-27; В.В. Дмитриев, И.Н. Замятина Патент РФ RU 2621319 C1 Способ и устройство измерения дальности в двухчастотном нелинейном радиолокаторе // Опубликовано: 02.06.2017 Бюл. № 16 ], заключающийся в том, что:
- нелинейным радиолокатором использующим в качестве принимаемого сигнала n-ю гармонику зондирующего сигнала, в направлении нелинейного рассеивателя излучаются, очищенные от побочных нелинейных продуктов, радиоимпульсы зондирующего сигнала в виде последовательности из M одинаковых радиоимпульсов зондирующего сигнала с периодом Т и длительностью τ, у которых частота заполнения изменяется по линейному закону в диапазоне изменения частоты заполнения ΔfЗС, а центральная частота равна fЗС, при этом, передний фронт первого радиоимпульса зондирующего сигнала является стартом для работы всех систем нелинейного радиолокатора,
- одновременно приёмником, настроенным на частоту (nfЗС), принимается принимаемый сигнал, состоявший из смеси шума и последовательности из M одинаковых переизлучаемых нелинейным рассеивателем радиоимпульсов рассеянного сигнала с периодом Т, длительностью τ, а частота их заполнения меняется по линейному закону в диапазоне изменения частоты заполнения (nΔfЗС), при этом центральная частота радиоимпульсов рассеянного сигнала равна (nfЗС),
- принимаемый сигнал преобразуется в приемнике в M реализаций сигнала промежуточной частоты с длительностью реализации Т, являющейся периодом для всех систем приемника нелинейного радиолокатора, при этом каждая реализация сигнала промежуточной частоты содержит шум и радиоимпульс преобразованного сигнала, имеющий длительность τ и изменяющий свою частоту заполнения по линейному закону в диапазоне изменения частоты заполнения (nΔfЗС) с центральной частотой реализации сигнала промежуточной частоты равной fПС,
- все M реализаций сигнала промежуточной частоты в приемнике синхронно суммируются с периодом Т, при этом формируется результирующий сигнал с длительностью равной Т, состоящий из шума и суммированного радиоимпульса, частота заполнения которого меняется по линейному закону в диапазоне изменения частоты заполнения (nΔfЗС) с центральной частотой реализации сигнала промежуточной частоты равной fПС,
- результирующий сигнал пропускается через согласованный фильтр, согласованный с суммированным радиоимпульсом, имеющим длительность τ, частоту заполнения меняющуюся по линейному закону в диапазоне (nΔfЗС) с центральной частотой равной fПС,
- по значению времени t, соответствующему положению основного максимума в сигнале на выходе согласованного фильтра оценивают дальность до цели, а по длительности Δt основного максимума сигнала на выходе согласованного фильтра оценивают точность определения дальности до нелинейного рассеивателя.
Указанный способ определения дальности нелинейным радиолокатором использующим линейно-частотно-модулированные зондирующие сигналы существенно лучше аналога - способа определения нелинейным радиолокатором дальности до нелинейного рассеивателя, представленного выше. Длительность основного максимума сигнала на выходе согласованного фильтра Δt , по которой оценивается точность определения дальности до нелинейного рассеивателя, существенно меньше длительности радиоимпульса зондирующего сигнала τ. Этот способ предлагается в качестве прототипа.
Недостатком прототипа является то, что при суммировании и квазиоптимальной обработке принимаемой смеси шума и полезного сигнала в согласованном фильтре улучшается только отношение сигал/шум, а разрешающая способность не зависит от времени накопления сигнала, то есть от числа обрабатываемых в приемнике реализаций смеси шума и сигнала рассеянного нелинейным рассивателем. Улучшение разрешающей способности возможно только путем расширения ширины спектральной полосы ΔfЗС зондирующего сигнала, однако этот путь ограничен частотными свойствами нелинейных рассеивателей.
Указанный недостаток устраняется в предлагаемом способе повышения точности определения дальности до нелинейного рассеивателя при помощи нелинейного радиолокатора, использующего линейно-частотно-модулированные зондирующие сигналы, заключающийся в том, что:
- нелинейным радиолокатором использующим в качестве принимаемого сигнала n-ю гармонику зондирующего сигнала, в направлении нелинейного рассеивателя излучаются, очищенные от побочных нелинейных продуктов, радиоимпульсы зондирующего сигнала в виде последовательности из M одинаковых радиоимпульсов зондирующего сигнала с периодом Т и длительностью τ, у которых частота заполнения изменяется по линейному закону в диапазоне изменения частоты заполнения Δ fЗС, а центральная частота равна fЗС, при этом, передний фронт первого радиоимпульса зондирующего сигнала является стартом для работы всех систем нелинейного радиолокатора,
- одновременно приёмником, настроенным на частоту (nfЗС), принимается принимаемый сигнал, состоявший из смеси шума и последовательности из M одинаковых переизлучаемых нелинейным рассеивателем радиоимпульсов рассеянного сигнала с периодом Т, длительностью τ, а частота их заполнения меняется по линейному закону в диапазоне изменения частоты заполнения (nΔfЗС), при этом центральная частота радиоимпульсов рассеянного сигнала равна (nfЗС),
- принимаемый сигнал преобразуется в приемнике в M реализаций сигнала промежуточной частоты с одинаковой длительностью реализации, являющейся периодом для всех систем приемника нелинейного радиолокатора, при этом каждая реализация сигнала промежуточной частоты содержит шум и радиоимпульс преобразованного сигнала, имеющий длительность τ и изменяющий свою частоту заполнения по линейному закону в диапазоне изменения частоты заполнения (nΔfЗС), при этом спектральная полоса тракта сигнала промежуточной частоты ограничивается спектром радиоимпульса преобразованного сигнала, а центральная частота первой реализации сигнала промежуточной частоты равна fПС,
- а у каждой следующей m-й реализации сигнала промежуточной частоты после первой реализации сигнала промежуточной частоты центральная частота реализации сигнала промежуточной частоты и границы спектральной полосы тракта сигнала промежуточной частоты постоянно увеличиваются или постоянно уменьшаются на величину (nΔfЗС),
- все M реализаций сигнала промежуточной частоты в приемнике синхронно суммируются с периодом равным длительности реализации, при этом формируется результирующий сигнал с длительностью равной длительности реализации, состоящий из шума и суммированного радиоимпульса, частота заполнения которого меняется по линейному закону,
- результирующий сигнал пропускается через согласованный фильтр, согласованный с суммированным радиоимпульсом, имеющим длительность (Mτ), частота заполнения которого, меняется по линейному закону в диапазоне (MnΔfЗС), при этом если при преобразовании принимаемого сигнала в M реализаций сигнала промежуточной частоты центральная частота реализации сигнала промежуточной частоты постоянно увеличивается, то частота заполнения суммированного радиоимпульса меняется от частоты (fПС-0,5nΔfЗС) до частоты (fПС+(M-0,5)nΔfЗС), а если при преобразовании принимаемого сигнала в M реализаций сигнала промежуточной частоты центральная частота реализации сигнала промежуточной частоты постоянно уменьшается, то частота заполнения суммированного радиоимпульса меняется от частоты (fПС+0,5nΔfЗС) до частоты (fПС-(M-1,5)nΔfЗС),
- по значению времени t, соответствующему положению основного максимума в сигнале на выходе согласованного фильтра оценивают дальность до цели, а по длительности Δt основного максимума сигнала на выходе согласованного фильтра оценивают точность определения дальности до нелинейного рассеивателя.
Техническим результатом предлагаемого изобретения является улучшение точности определения дальности до нелинейного рассеивателя в нелинейном радиолокаторе, использующего линейно-частотно-модулированные зондирующие сигналы при сохранении параметров обнаружения не хуже, чем у прототипа. В предлагаемом способе длительность Δ t основного максимума сигнала на выходе согласованного фильтра, определяющая погрешность определения дальности до нелинейного рассеивателя, уменьшается с увеличением величины M - числа обрабатываемых в приемнике реализаций смеси шума и сигнала рассеянного нелинейным рассивателем.
Сущность предлагаемого изобретения заключается в том, что при обработке принимаемой приемником нелинейного радиолокатора серии сигналов с периодом Т в виде M реализаций смеси шума и рассеянного нелинейным рассивателем сигнала в виде последовательности из M линейно-частотно-модулированных радиоимпульсов рассеянного сигнала с ростом величины M улучшаются одновременно и отношение сигнал/шум и точность определения дальности до нелинейного рассеивателя.
Это происходит по той причине, что и для прототипа, и для предлагаемого технического решения при формировании результирующего сигнала шумы складываются некогерентно, то есть складываются их мощности, при этом амплитуда шума в результирующем сигнале вырастет в M0,5 раз.
При формировании суммированного радиоимпульса в прототипе происходит когерентное сложение сигналов одинаковых радиоимпульсов преобразованного сигнала изменяющих свою частоту заполнения по линейному закону в диапазоне изменения частоты заполнения (nΔfЗС) с длительностями τ и центральной частотой fПС. В результате в прототипе на выходе согласованного фильтра амплитуда сигнала вырастает в M раз, а длительность основного максимума сигнала на выходе согласованного фильтра будет уменьшена до величины близкой к Δt≅1/(nΔfЗС).
При формировании суммированного радиоимпульса в предлагаемом техническом решении происходит синхронное сложение разных сигналов радиоимпульсов преобразованного сигнала изменяющих свою частоту заполнения по линейному закону в диапазоне изменения частоты заполнения (nΔfЗС) с длительностями τ и центральными частотами отличающимися тоже на (nΔfЗС). При этом формируется суммированный радиоимпульс изменяющий свою частоту заполнения по линейному закону в диапазоне изменения частоты заполнения (MnΔfЗС).
В результате в предлагаемом техническом решении на выходе согласованного фильтра амплитуда сигнала вырастает в M раз как и у прототипа, а длительность основного максимума сигнала на выходе согласованного фильтра будет уменьшена до величины близкой к Δ t≅1/(MnΔfЗС), то есть в M раз меньше, чем у прототипа.
Новым является то, что в новом техническом решении использован асинхронный режим работы нелинейного радиолокатора, а именно за счет сочетания излучения зондирующего сигнала в виде последовательности из M одинаковых радиоимпульсов с периодом Т и длительностью τ, у которых частота заполнения изменяется по линейному закону в диапазоне изменения частоты заполнения ΔfЗС, а центральная частота равна fЗС и одновременной синхронной обработки принимаемого сигнала в приемнике с периодом (Т-τ ) на вход согласованного фильтра в приемнике поступает линейно-частотно-модулированный суммированный радиоимпульс с диапазоном изменения частоты в M раз больше, чем у прототипа, что и повышает точность определения дальности нелинейным радиолокатором при сохранении соотношения сигнал/шум.
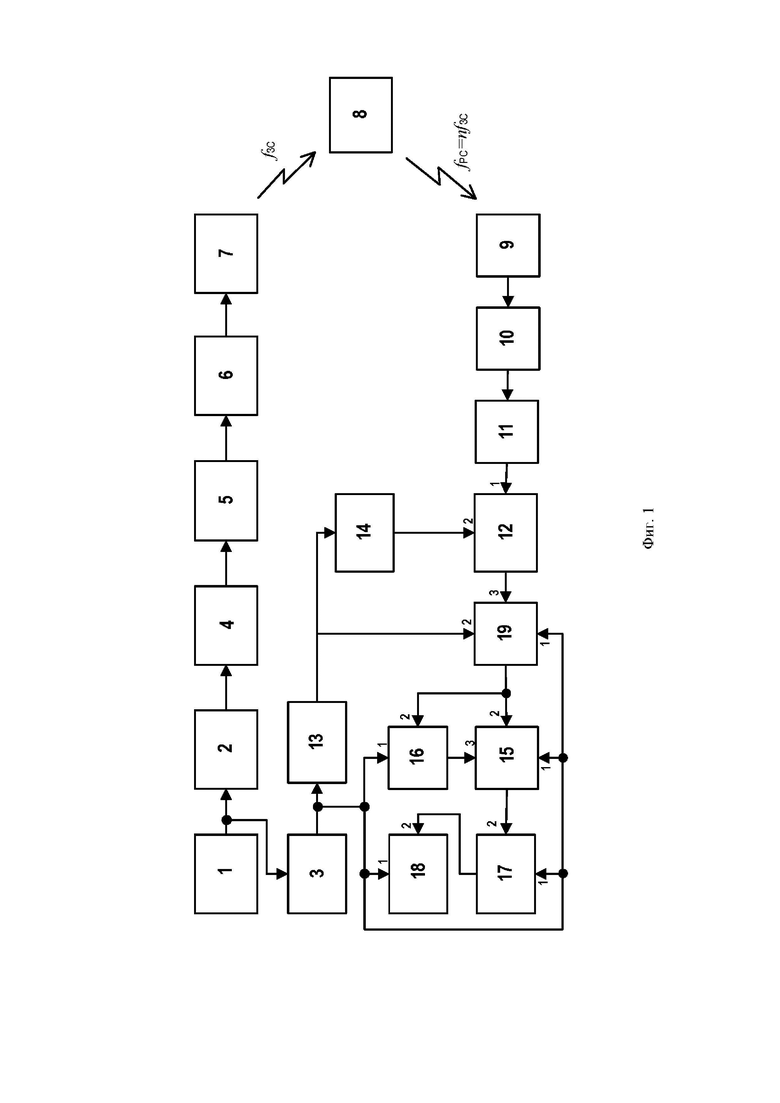
Предлагаемый способ повышения точности определения дальности до нелинейного рассеивателя при помощи нелинейного радиолокатора использующего линейно-частотно-модулированные зондирующие сигналы может быть реализован в нелинейном радиолокаторе, использующем линейно-частотно-модулированные зондирующие сигналы, с улучшенной точностью определения дальности, блок-схема которого представлена на фиг. 1, здесь: 1 - Тактовый генератор видеоимпульсов с периодом τ, 2 - Формирователь видеоимпульсов зондирующего сигнала с периодом T, 3 - Формирователь периодов (T-τ), 4 - Генератор линейно-частотно-модулированных зондирующих радиоимпульсов, 5 - Усилитель зондирующего сигнала, 6 - Полосовой фильтр зондирующего сигнала, 7 - Антенна зондирующего сигнала, 8 - Нелинейный рассеиватель, 9 - Антенна принимаемого сигнала, 10 - Полосовой фильтр принимаемого сигнала, 11 - Усилитель принимаемого сигнала, 12 - Смеситель, 13 - Счетчик номера периода m, 14 - Гетеродин, 15 - Сумматор, 16 - Согласованный фильтр, 17 - Линия задержки на период (T-τ), 18 - Индикатор, 19 - Цифровой полосовой фильтр промежуточной частоты.
Выход Тактового генератора 1 видеоимпульсов с периодом τ соединен: с входом Формирователя 2 видеоимпульсов зондирующего сигнала с периодом T , и входом Формирователя 3 периодов (T-τ). Выход Формирователя 2 видеоимпульсов зондирующего сигнала с периодом T соединен с входом Генератора 4 линейно-частотно-модулированных зондирующих радиоимпульсов. Выход Генератора 4 линейно-частотно-модулированных зондирующих радиоимпульсов соединен с входом Усилителя 5 зондирующего сигнала. Выход Усилителя 5 зондирующего сигнала соединен с входом Полосового фильтра 6 зондирующего сигнала.
Выход Усилителя 5 зондирующего сигнала соединен со входом Антенны 7 зондирующего сигнала. Нелинейный рассеиватель 8 находится в зоне облучения антенны 7 зондирующего сигнала и в зоне приема антенны 9 принимаемого сигнала. Выход Антенны 9 принимаемого сигнала соединен с входом Полосового фильтра 10 принимаемого сигнала. Выход Полосового фильтра 10 принимаемого сигнала соединен со входом Усилителя 11 принимаемого сигнала. Выход Усилителя 11 принимаемого сигнала соединен с первым входом Смесителя 12. Выход Формирователя 3 периодов (T-τ) соединен со: входом Счетчика 13 номера периода m, первым входом Гетеродина 14, первым входом Сумматора 15, первым входом Линии задержки 16 на период (T-τ), первым входом Согласованного фильтра 17, первым входом Индикатора18, первым входом Цифрового полосового фильтра 19.
Выход Счетчика 13 номера периода m соединен со входом Гетеродина 14 и вторым входом Цифрового полосового фильтра 19.
Выход Гетеродина 14 соединен со вторым входом Смесителя 12.
Выход Смесителя 12 соединен с третьим входом Цифрового полосового фильтра 19 промежуточной частоты. Выход Цифрового полосового фильтра 19 промежуточной частоты соединен со вторым входом Сумматора 15 и одновременно со вторым входом Линии задержки 16 на период (T-τ). Выход Линии задержки 16 на период T-τ соединен с третьим входом Сумматора 15. Выход Сумматора 15 соединен со вторым входом Согласованного фильтра17. Выход Согласованного фильтра 17 соединен со вторым входом Индикатора18.
Опишем функционирование нелинейного радиолокатора, использующего линейно-частотно-модулированные зондирующие сигналы, с улучшенной точностью определения дальности для M=3.
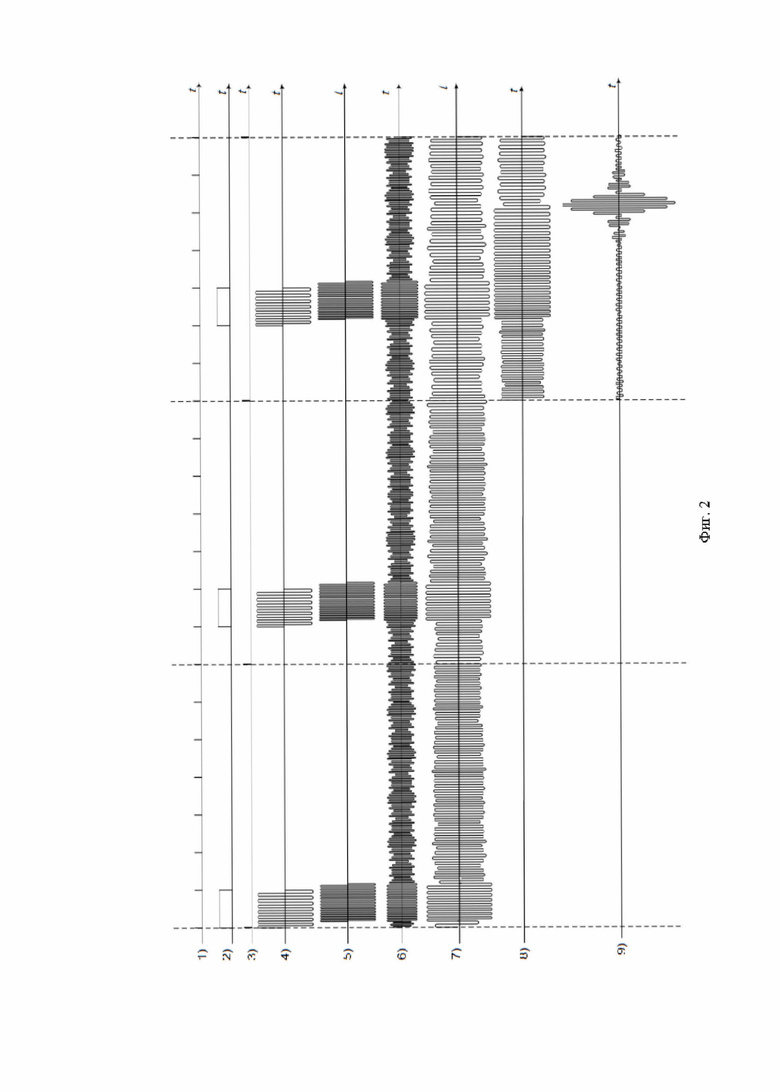
1) Тактовый генератор 1 формирует последовательность тактовых коротких видеоимпульсов период которых равен τ , представленных на фиг. 2, кривая 1.
2) Эта последовательность тактовых коротких видеоимпульсов поступает на вход Формирователя 2 видеоимпульсов зондирующего сигнала с периодом T, где формируется последовательность видеоимпульсов с периодом T и длительностями τ, представленная на фиг. 2, кривая 2.
3) Одновременно последовательность тактовых коротких видеоимпульсов период которых равен τ с тактового генератора 1 поступает на вход Формирователя 3 периодов (T-τ), где на их основе формируется последовательность, являющейся периодом для всех систем приемника нелинейного радиолокатора, в виде коротких синхронизирующих видеоимпульсов с периодом (T-τ), представленная на фиг. 2, кривая 3.
4) Последовательность видеоимпульсов с периодом T с выхода Формирователя 2 видеоимпульсов зондирующего сигнала с периодом T поступает на вход Генератора 4 линейно-частотно-модулированных зондирующих радиоимпульсов, где формируется последовательность из M (M=3) одинаковых радиоимпульсов зондирующего сигнала у которых центральная частота равна fЗС, частота заполнения изменяется по линейному закону в диапазоне изменения частоты заполнения ΔfЗС , длительность равна τ, а период повторения Т, представленная на фиг. 2 кривая 4.
5) Эта последовательность радиоимпульсов зондирующего сигнала усиливается в Усилителе 5 зондирующего сигнала, очищается от побочных нелинейных продуктов в Полосовом фильтре 6 зондирующего сигнала и излучаются при помощи Антенны 7 зондирующего сигнала в направлении нелинейного рассеивателя 8.
6) Одновременно с выхода Формирователя 3 периодов (T-τ) синхронизирующая последовательность (фиг. 2 кривая 3) в виде коротких синхронизирующих видеоимпульсов с периодом (T-τ) поступает на: вход Счетчика 13 номера периода m, первый вход Гетеродина 14, первый вход Сумматора 14, первый вход Линии задержки 16 на период (T-τ), первый вход Согласованного фильтра 17, первый вход Индикатора 18, первый вход Цифрового полосового фильтра 19 осуществляя синхронизацию работы приемника нелинейного радиолокатора.
7) Счетчиком 13 номера периода m отсчитывается текущий номера периода m, который передается на Гетеродин 14 и на второй вход Цифрового полосового фильтра 19.
8) Одновременно в результате проявления эффекта нелинейного рассеяния на нелинейном рассеивателе 8 происходит нелинейное преобразование радиоимпульсов зондирующего сигнала, в результате которого на частоте n-й гармоники зондирующего сигнала в направлении Антенны 9 принимаемого сигнала переизлучаются радиоимпульсы рассеянного сигнала с периодом Т, длительностью τ, центральной частотой равной (nfЗС), частота заполнения которых меняется по линейному закону в диапазоне изменения частоты заполнения (nΔfЗС), представленная на фиг. 2 кривая 5.
9) Радиоимпульсы рассеянного сигнала принимаются Антенной 9 принимаемого сигнала, проходят через Полосовой фильтр 10 принимаемого сигнала и вместе с шумом и помехами поступают на вход Усилителя 11 принимаемого сигнала.
10) С выхода Усилителя 11 принимаемого сигнала смесь шума и последовательности из M одинаковых переизлучаемых нелинейным рассеивателем радиоимпульсов рассеянного сигнала с периодом Т, представленная на фиг. 2 кривая 6, поступает на первый вход Смесителя 12.
11) Одновременно в Гетеродине 14 на основе поступающих на входы синхронизирующей видеоимпульсов с периодом (T-τ) и текущего номера периода m формируется сигнал гетеродина в виде узкополосного радиоимпульса с длительностью (T-τ) и частотой fГ, определяемой в соответствии с зависимостью (fГ=fГ1-(m-1)ΔnfЗС), где fГ1=const. Этот сигнал поступает на гетеродинный второй вход Смесителя 12.
12) В то же время, на основе поступающих на входы Цифрового полосового фильтра 19 промежуточной частоты сигналов: на вход 1 синхронизирующих видеоимпульсов с периодом (T-τ) и на вход 2 текущего номера периода m, в Цифровом полосовом фильтре 19 промежуточной частоты формируется полоса пропускания от fПС1 до fПС2 , соответствующая спектру текущего радиоимпульса преобразованного сигнала с центральной частотой fПС в соответствии с зависимостями:
fПС = nfЗС-fГ1-(m-1)ΔnfЗС,
fПС1 = nfЗС-fГ1-(m-0,5)ΔnfЗС,
fПС2 = nfЗС-fГ1-(m-1,5)ΔnfЗС.
13) В Смесителе 12 происходит нелинейное преобразование суммы сигнала гетеродина и смеси шума и последовательности из M одинаковых переизлучаемых нелинейным рассеивателем радиоимпульсов рассеянного сигнала с периодом Т.
14) Одна из компонент нелинейного преобразования сигналов в смесителе с частотой fПС = nfЗС-fГ1-(m-1)ΔnfЗС, находящаяся в частотной полосе от частоты (fПС+0,5nΔfЗС) до частоты (fПС-(M-1,5)nΔfЗС), представленная на фиг. 2 кривая 7, проходит через Цифровой полосовой фильтр 19 промежуточной частоты и поступает одновременно на вторые сигнальные входы Сумматора 15 и Линии задержки 16 на период (T-τ).
15) В системе Сумматор 15 и Линия задержки 16 на период (T-τ) все M реализаций сигнала промежуточной частоты синхронно суммируются с периодом (T-τ) в течении M периодов.
16) При последнем M-м периоде суммирования на выходе Сумматора 15 формируется результирующий сигнал с длительностью равной длительности реализации, состоящий из шума и суммированного радиоимпульса, частота заполнения которого меняется по линейному закону, представленный на фиг. 2 кривая 8.
Этот результирующий сигнал, сформированный на M-м периоде суммирования с выхода Сумматора 15 поступает на вход Согласованного фильтра 17.
17) По значению времени t, соответствующему положению основного максимума в сигнале на выходе согласованного фильтра, представленного на фиг. 2 кривая 9, оценивают дальность до цели, а по длительности Δt основного максимума сигнала на выходе согласованного фильтра оценивают точность определения дальности до нелинейного рассеивателя.
Для реализации предлагаемого технического решения могут быть использованы блоки и приборы, выпускаемые в настоящее время промышленностью, а так же описанные в прототипе [В.В. Дмитриев, И.Н. Замятина Патент РФ RU 2621319 C1 Способ и устройство измерения дальности в двухчастотном нелинейном радиолокаторе // Опубликовано: 02.06.2017 Бюл. № 16]. В частности, Генератор 4 линейно-частотно-модулированных зондирующих радиоимпульсов, Усилитель 5 зондирующего сигнала, Полосовой фильтр 6 зондирующего сигнала, Антенна 7 зондирующего сигнала в предлагаемом техническом решении могут реализоваться аналогично передатчику, формирующему ЛЧМ сигнал с полосой Δf на несущей частоте f1 в патенте РФ RU 2621319 C1. Кроме того может быть использовано стандартное промышленное оборудование: ЛЧМ генераторы сигнала типа AnaPico серии RFSG12,20,26 и RFSU6,12,20,26,40; Мощные широкополосные СВЧ-усилители типа MS0082540, антенны типа П6-33.
Наиболее перспективным объектом поиска - то есть нелинейным рассивателем могут выступать мины с электронными взрывателями, описанные в [Г.Н. Щербаков Средства обнаружения управляемых взрывных устройств. Специальная техника, 2000, №5 с. 40-43].
Антенна 9 принимаемого сигнала, как и Антенна 7 зондирующего сигнала могут быть изготовлены по [Кочержевский Г.Н. Антенн-фидерные устройства. - М.: Связь, 1972].
Полосовой фильтр 10 принимаемого сигнала, Полосовой фильтр 6 зондирующего сигнала могут быть изготовлены по [В.П. Леонченко, А.Л. Фельдштейн, Л.А. Шепелянский Расчет полосковых фильтров на встречных стержнях. Справочник. Москва: Издательство «Связь», 1975].
В качестве Усилителя 11 принимаемого сигнала может быть применен стандартный малошумящий усилитель MAHW001040-03 фирмы МИКРАН.
Смеситель12 может быть изготовлен по [Сазонов Д.М., Гридин А.Н., Мишустин Б.А. Устройства СВЧ. - М.: Высшая школа, 1981 - 295с].
В качестве Гетеродина 14 может быть использован измерительный высокочастотный генератор АКИП-7SG382.
Сумматор 15, Линия задержки 16 на период (T-τ), Согласованный фильтр 17, Гетеродин 14 - могут быть выполнены аналогично [В.В. Дмитриев, И.Н. Замятина Патент РФ RU 2621319 C1 Способ и устройство измерения дальности в двухчастотном нелинейном радиолокаторе // Опубликовано: 02.06.2017 Бюл. № 16], либо на основе сигнального процессора по [А.И. Тяжев; В.Г. Иванова Цифровая обработка сигналов и сигнальные процессоры: учеб. пособие - Самара: ИУНЛ ПГУТИ, 2008 .- 307 с. - URL: https://rucont.ru/efd/278729] в виде цифрового блока обработки сигналов.
Цифровой полосовой фильтр 19 промежуточной частоты может быть выполнен на основе сигнального процессора по [А.И. Тяжев; В.Г. Иванова Цифровая обработка сигналов и сигнальные процессоры: учеб. пособие - Самара: ИУНЛ ПГУТИ, 2008 .-- 307 с. - URL: https://rucont.ru/efd/278729].
В качестве Индикатора 18 может быть использован персональный компьютер с промышленным интерфейсом.
Тактовый генератор 1 видеоимпульсов с периодом τ, Формирователь 2 видеоимпульсов зондирующего сигнала с периодом T, Формирователь 3 периодов (T-τ), Счетчик 13 номера периода m могут быть выполнены на основе стандартный логических микросхем по [ И.В. Малышев, Н. В. Паршина Схемотехника импульсных электронных средств. Учебное пособие. Ростов-на-Дону - Таганрог Издательство Южного федерального университета 2017] , либо на основе сигнального процессора по [А.И. Тяжев; В.Г. Иванова Цифровая обработка сигналов и сигнальные процессоры: учеб. пособие - Самара: ИУНЛ ПГУТИ, 2008. - 307 с. - URL: https://rucont.ru/efd/278729] в виде цифрового блока синхронизации сигналов.
Таким образом предлагаемое техническое решение может быть реализовано на современном уровне техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения координат нелинейного рассеивателя комбинационным радиолокатором | 2024 |
|
RU2839938C1 |
| Способ повышения точности определения дальности в узкополосных радиолокаторах | 2024 |
|
RU2833591C1 |
| СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ ДАЛЬНОСТИ В ДВУХЧАСТОТНОМ НЕЛИНЕЙНОМ РАДИОЛОКАТОРЕ | 2016 |
|
RU2621319C1 |
| НЕЛИНЕЙНЫЙ РАДАР ДЛЯ ОБНАРУЖЕНИЯ ИСПОЛНИТЕЛЬНЫХ РАДИОЭЛЕКТРОННЫХ УСТРОЙСТВ УПРАВЛЕНИЯ ВЗРЫВОМ | 2003 |
|
RU2251708C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОДНОКОНТУРНЫХ ПАРАМЕТРИЧЕСКИХ РАССЕИВАТЕЛЕЙ С НЕЛИНЕЙНЫМ ФОРМИРОВАНИЕМ СИНХРОНИЗИРУЮЩЕГО СИГНАЛА | 2011 |
|
RU2496122C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ШИРОКОПОЛОСНЫХ ПАРАМЕТРИЧЕСКИХ РАССЕИВАТЕЛЕЙ | 2013 |
|
RU2532258C1 |
| ПАРАМЕТРИЧЕСКИЙ РАССЕИВАТЕЛЬ - МАРКЕР С НЕЛИНЕЙНЫМ ФОРМИРОВАНИЕМ СИНХРОСИГНАЛОВ | 2011 |
|
RU2507537C2 |
| СПОСОБ И УСТРОЙСТВО НЕЛИНЕЙНОЙ РАДИОЛОКАЦИИ | 2011 |
|
RU2474839C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОДНОКОНТУРНЫХ ПАРАМЕТРИЧЕСКИХ РАССЕИВАТЕЛЕЙ | 2009 |
|
RU2413242C2 |
| НЕЛИНЕЙНЫЙ РАДАР ДЛЯ ОБНАРУЖЕНИЯ ПОДСЛУШИВАЮЩИХ УСТРОЙСТВ | 2007 |
|
RU2327185C1 |
Изобретение относится к способам нелинейной радиолокации, в которых в качестве принимаемого полезного сигнала используется сигнал, рассеянный нелинейным рассеивателем на частоте одной из гармоник зондирующего сигнала. Техническим результатом является повышение точности определения дальности до нелинейного рассеивателя в нелинейном радиолокаторе, использующего линейно-частотно-модулированные зондирующие сигналы, при сохранении соотношения сигнал/шум. В заявленном способе использован асинхронный режим работы нелинейного радиолокатора. При обработке сигнала, принимаемого приемником нелинейного радиолокатора в виде смеси шума и M линейно-частотно-модулированных радиоимпульсов рассеянного сигнала с центральной частотой nfЗС, диапазоном изменения частоты nΔfЗС, периодом Т и длительностями τ осуществляется разбиение принимаемого сигнала на M реализаций с длительностями (Т-τ) и преобразование каждой реализации на свою промежуточную частоту таким образом, что промежуточная частота и границы спектральной полосы каждой m-й реализации постоянно увеличиваются или постоянно уменьшаются на величину nΔfЗС. При синхронном суммировании всех M реализаций формируется суммированный радиоимпульс, изменяющий свою частоту заполнения по линейному закону в диапазоне изменения частоты заполнения MnΔfЗС. Результат компрессии такого суммированного радиоимпульса в согласованном фильтре позволяет улучшить точность определения дальности до нелинейного рассеивателя в M раз. 2 ил.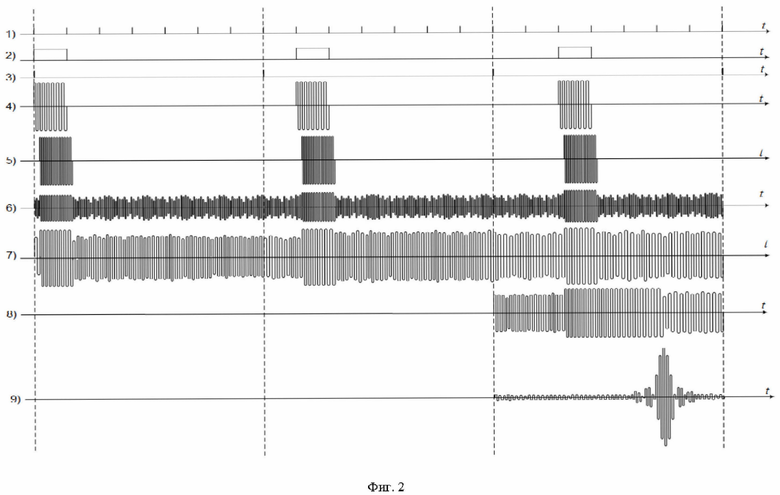
Способ повышения точности определения дальности до нелинейного рассеивателя при помощи нелинейного радиолокатора, использующего линейно-частотно-модулированные зондирующие сигналы, заключающийся в том, что нелинейным радиолокатором, использующим в качестве принимаемого сигнала n-ю гармонику зондирующего сигнала, в направлении нелинейного рассеивателя излучаются очищенные от побочных нелинейных продуктов радиоимпульсы зондирующего сигнала в виде последовательности из M одинаковых радиоимпульсов зондирующего сигнала с периодом Т и длительностью τ, у которых частота заполнения изменяется по линейному закону в диапазоне изменения частоты заполнения ΔfЗС, а центральная частота равна fЗС, при этом передний фронт первого радиоимпульса зондирующего сигнала является стартом для работы всех систем нелинейного радиолокатора, одновременно приёмником, настроенным на частоту nfЗС, принимается принимаемый сигнал, состоящий из смеси шума и последовательности из M одинаковых переизлучаемых нелинейным рассеивателем радиоимпульсов рассеянного сигнала с периодом Т, длительностью τ, а частота их заполнения меняется по линейному закону в диапазоне изменения частоты заполнения nΔfЗС, при этом центральная частота радиоимпульсов рассеянного сигнала равна nfЗС, принимаемый сигнал преобразуется в приемнике в M реализаций сигнала промежуточной частоты с одинаковой длительностью реализации, являющейся периодом для всех систем приемника нелинейного радиолокатора, при этом каждая реализация сигнала промежуточной частоты содержит шум и радиоимпульс преобразованного сигнала, имеющий длительность τ и изменяющий свою частоту заполнения по линейному закону в диапазоне изменения частоты заполнения nΔfЗС, при этом спектральная полоса тракта сигнала промежуточной частоты ограничивается спектром радиоимпульса преобразованного сигнала, а центральная частота первой реализации сигнала промежуточной частоты равна fПС, все M реализаций сигнала промежуточной частоты в приемнике синхронно суммируются с периодом, равным длительности реализации, при этом формируется результирующий сигнал с длительностью, равной длительности реализации, состоящий из шума и суммированного радиоимпульса, частота заполнения которого меняется по линейному закону, результирующий сигнал пропускается через согласованный фильтр, согласованный с суммированным радиоимпульсом, по значению времени t, соответствующему положению основного максимума в сигнале на выходе согласованного фильтра, оценивают дальность до цели, а по длительности Δt основного максимума сигнала на выходе согласованного фильтра оценивают точность определения дальности до нелинейного рассеивателя, отличающийся тем, что длительность каждой реализации сигнала промежуточной частоты равна (Т-τ), при преобразовании в приемнике нелинейного радиолокатора принимаемого сигнала в M реализаций сигнала промежуточной частоты для каждой следующей m-й реализации сигнала промежуточной частоты после первой реализации сигнала промежуточной частоты центральная частота реализации сигнала промежуточной частоты и границы спектральной полосы тракта сигнала промежуточной частоты постоянно увеличиваются или постоянно уменьшаются на величину nΔfЗС, согласованный фильтр согласован с суммированным радиоимпульсом, имеющим длительность Mτ, частота заполнения которого меняется по линейному закону в диапазоне MnΔfЗС, при этом если при преобразовании принимаемого сигнала в M реализаций сигнала промежуточной частоты центральная частота реализации сигнала промежуточной частоты постоянно увеличивается, то частота заполнения суммированного радиоимпульса меняется от частоты (fПС-0,5nΔfЗС) до частоты (fПС+(M-0,5)nΔfЗС), а если при преобразовании принимаемого сигнала в M реализаций сигнала промежуточной частоты центральная частота реализации сигнала промежуточной частоты постоянно уменьшается, то частота заполнения суммированного радиоимпульса меняется от частоты (fПС+0,5nΔfЗС) до частоты (fПС-(M-1,5)nΔfЗС).
| СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ ДАЛЬНОСТИ В ДВУХЧАСТОТНОМ НЕЛИНЕЙНОМ РАДИОЛОКАТОРЕ | 2016 |
|
RU2621319C1 |
| СПОСОБ НЕЛИНЕЙНОЙ РАДИОЛОКАЦИИ С ЛИНЕЙНЫМ ЧАСТОТНЫМ МОДУЛИРОВАННЫМ ЗОНДИРУЮЩИМ СИГНАЛОМ | 2020 |
|
RU2750571C1 |
| НЕЛИНЕЙНЫЙ РАДАР ДЛЯ ДИСТАНЦИОННОГО МОНИТОРИНГА ПРОДУКТОПРОВОДОВ | 2007 |
|
RU2343499C1 |
| СПОСОБ УЛУЧШЕНИЯ ХАРАКТЕРИСТИК НЕЛИНЕЙНОГО РАДИОЛОКАТОРА | 2016 |
|
RU2643199C1 |
| БАБАНОВ И.Н., ДМИТРИЕВ В.В., ЗАМЯТИНА И.Н | |||
| О применении ЛЧМ-зондирующих сигналов в нелинейной радиолокации // Вестник НГИЭИ | |||
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Сс | |||
| Способ использования делительного аппарата ровничных (чесальных) машин, предназначенных для мериносовой шерсти, с целью переработки на них грубых шерстей | 1921 |
|
SU18A1 |
| HARGER R | |||
| Harmonic radar systems for near-ground in-foliage nonlinear scatterers | |||
| IEEE | |||

