Изобретение относится к электрическим соединительным устройствам, состоящим по крайней мере из двух частей, а именно к дополнительным средствам для облегчения замыкания или размыкания соединяемых частей.
Из патента РФ №2201643, дата приоритета 20.11.2000, МПК H01R 13/629, опубл. 20.12.2002, бюл. №35, известен соединитель, который содержит подвижную и неподвижную части с контактными элементами, направляющую в виде скобы с наклонными пазами и не менее двух пар неподвижно закрепленных роликов. На диаметрально противоположных сторонах первой части неподвижно закреплены по крайней мере две пары роликов. Вторая пара роликов необходима для устранения возможного перекоса при расчленении двух частей соединителя и заклинивания этих частей в момент окончания расчленения. Направляющая выполнена в виде скобы, в боковых сторонах которой имеются наклонные пазы. Конфигурация пазов может быть различной: прямоугольной, дугообразной и т.д. в зависимости от параметров соединителя. Скоба неподвижно скреплена с объектом, в котором установлена первая часть соединителя.
Каждый из роликов расположен в соответствующем пазе скобы с возможностью перемещения по пазу. Работа соединителя происходит следующим образом. В исходном сочлененном положении взаимодействующие части соединителя состыкованы. Ролики первой части соединителя находятся в крайнем положении наклонного паза скобы. Наклон пазов в боковых сторонах скобы должен быть расположен против направления хода подвижного объекта. Расчленение происходит за счет усилия хода подвижного объекта, в котором закреплена вторая часть соединителя. Усилие хода подвижного объекта передается через вторую часть первой части соединителя. Происходит поступательное движение соединителя в направлении хода объекта. При этом ролики первой части соединителя, продвигаясь по наклонным пазам неподвижной скобы, раскладывают усилие хода объекта на составляющие. Под действием одной из них, направленной вдоль оси расчленения, происходит расчленение первой и второй частей соединителя усилием хода подвижного объекта перпендикулярно оси расчленения.
Недостатками указанного соединителя является то, что он не позволяет обеспечить неподвижное замыкание соединенных частей в условиях, когда расстояние между объектами как в направлении, перпендикулярном плоскости разъема, так и в направлении плоскости разъема, изменяется вследствие вибрации при транспортировке, при тепловых деформациях и т.д. Взаимное перемещение в направлении плоскости разъема может привести к деформации и поломке стыкуемых частей соединителя. Взаимное перемещение в направлении, перпендикулярном плоскости разъема, может привести к потере электрического контакта. Кроме того, неподвижное закрепление роликов обусловливает наличие трения скольжения между роликами и пазами, что приводит к дополнительным нагрузкам при работе устройства. В конструкции размыкающее усилие прилагается непосредственно к размыкаемым частям так, что возникает изгибающий момент, который может привести к деформации элементов конструкции и к поломке. Устройство не позволяет отдалить размыкаемые части друг от друга, для прохождения объекта мимо при наличии на объекте уступа.
Также недостатком является невозможность монтажа или демонтажа первой части соединителя вертикально вдоль оси соединения, что ограничивает область применения данного соединителя. Для демонтажа или монтажа требуется извлекать его вместе с рамкой из объекта, на котором закреплена рамка.
Наиболее близким к заявляемому изобретению по количеству сходных существенных признаков является патент РФ №2791722 "Механизм электросоединителя", дата приоритета 24.05.2022, МПК H01R 13/629, опубл. 13.03.2023, бюл. №8. Это изобретение примем за прототип.
Механизм электросоединителя содержит две размыкаемые между собой части, две пары роликов и направляющую, в направлении размыкания располагается соединенный с одной из размыкаемых частей шток с пружиной и перемещающейся по нему штангой, на диаметрально противоположных сторонах которой располагаются с возможностью вращения на своих осях два ролика. Направляющая выполнена в виде рамки, неподвижно закрепленной на объекте, с которым связана эта часть соединителя, причем в боковых сторонах рамки выполнены пазы, каждый из которых состоит из прямолинейного и радиального участков, с каждым пазом взаимодействует соответствующий ролик. Ролики располагаются между стенками нижних пазов рамки с радиальными зазорами, величина которых должна быть не менее вариации взаимного расположения объектов в направлении размыкания. Вторая размыкаемая часть и упор закреплены на другом объекте.
Указанный механизм соединителя имеет следующие недостатки:
Невозможность монтажа или демонтажа первой части соединителя вертикально вдоль оси соединения, что ограничивает область применения данного соединителя. Для демонтажа или монтажа требуется извлекать его вместе с рамкой из объекта, на котором закреплена рамка, либо проводить демонтаж роликов и осей, на которых расположены ролики, что не всегда возможно, так как вокруг рамки может отсутствовать достаточное свободное пространство для проведения манипуляций.
Недостатком указанного механизма соединителя является также длинная траектория движения при размыкании (выведение второй части из зоны движения объекта с уступом начинается только после того, как произошло размыкание соединителя). В совокупности с большой перемещаемой при размыкании массой, обусловленной закрепленными на второй части пружины с роликами, длинная траектория приводит к накоплению кинетической энергии, которую необходимо компенсировать в момент остановки движения после размыкания. Возникает необходимость повышать прочность конструкции, к примеру, увеличением массы несущих элементов конструкции. Это приводит к снижению КПД.
Технической задачей заявляемого изобретения является обеспечение возможности монтажа и демонтажа элементов конструкции в условиях эксплуатации с применением распространенного слесарного инструмента, например, гаечных ключей, а также повышение КПД конструкции и обеспечение надежной работы конструкции в условиях наличия смещений, вызываемых погрешностями изготовления деталей, вибрациями, температурными деформациями суточного и сезонного характера.
Механизм электросоединителя представлен на следующих чертежах:
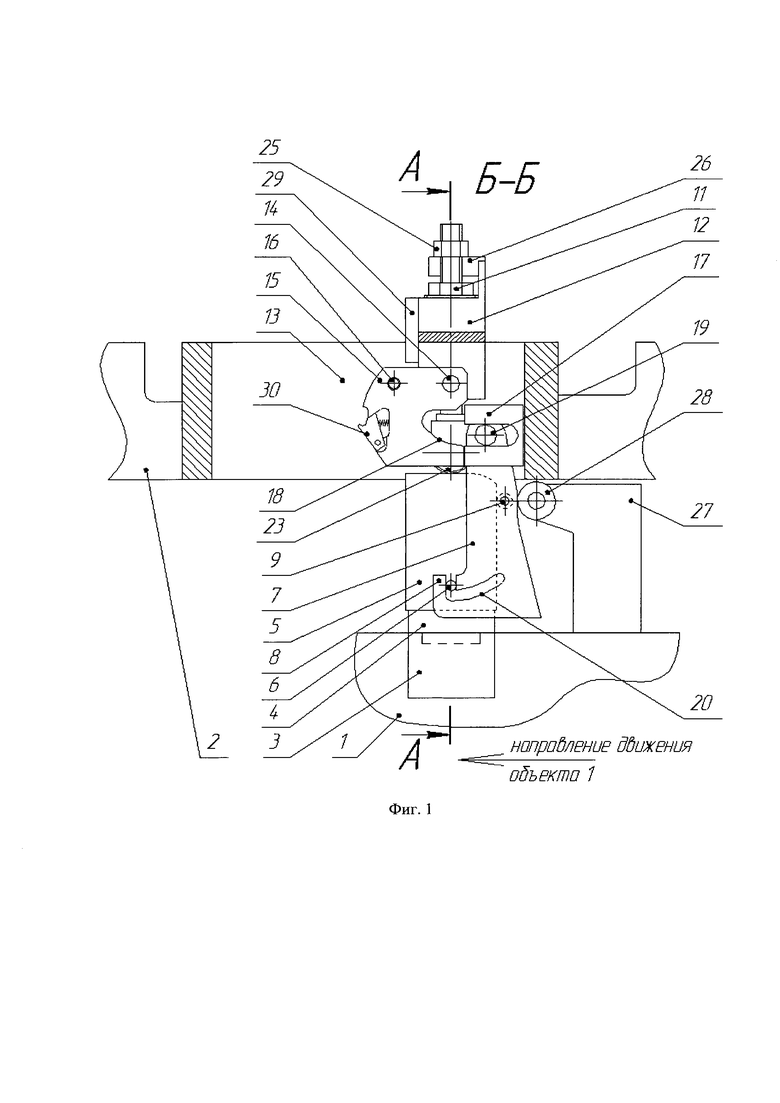
Фиг. 1 - Продольное сечение механизма электросоединителя по плоскости между боковой стенкой рамки и ловушкой.
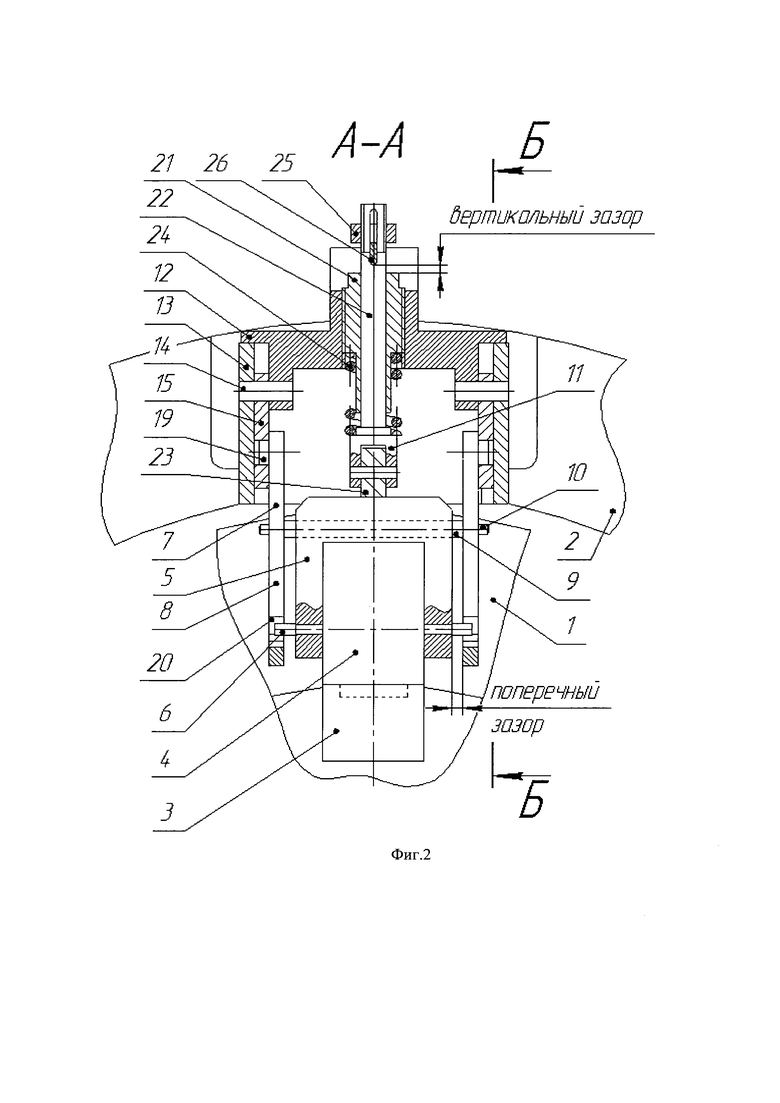
Фиг. 2 - Поперечное сечение механизма электросоединителя.
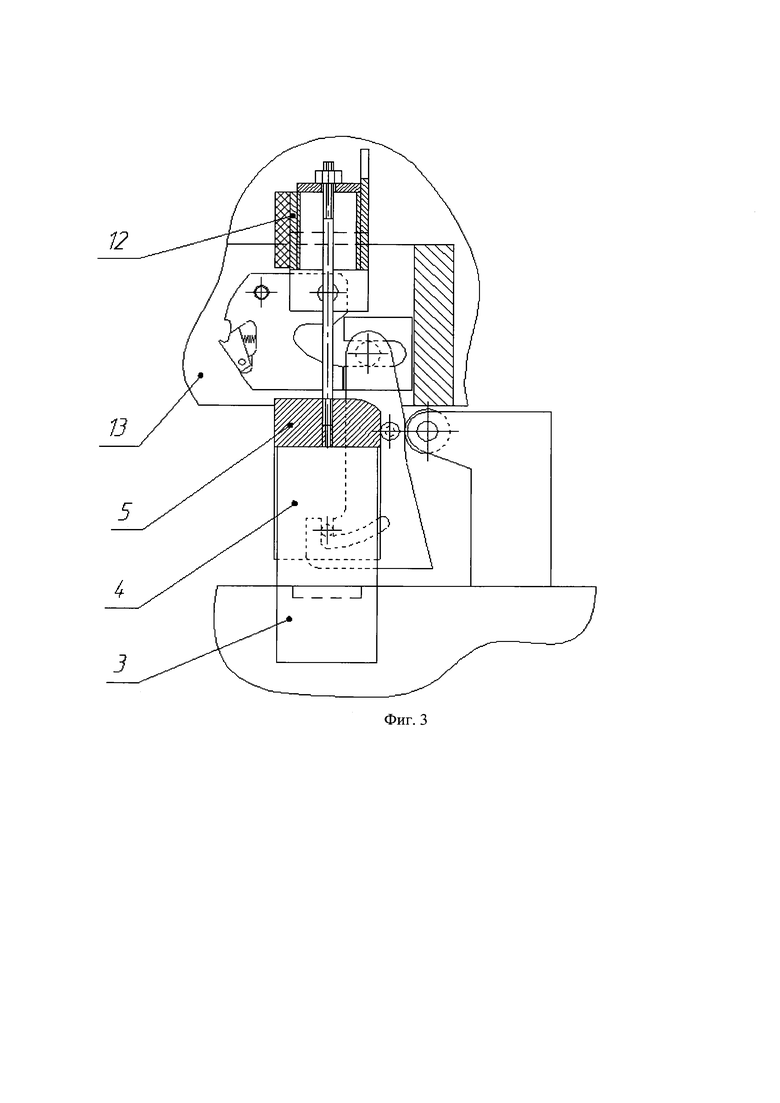
Фиг. 3 - Демонтаж силовой скобы в сборе с верхней частью электросоединителя при помощи вспомогательных шпильки, шайбы и гайки (в продольном сечении по плоскости симметрии).
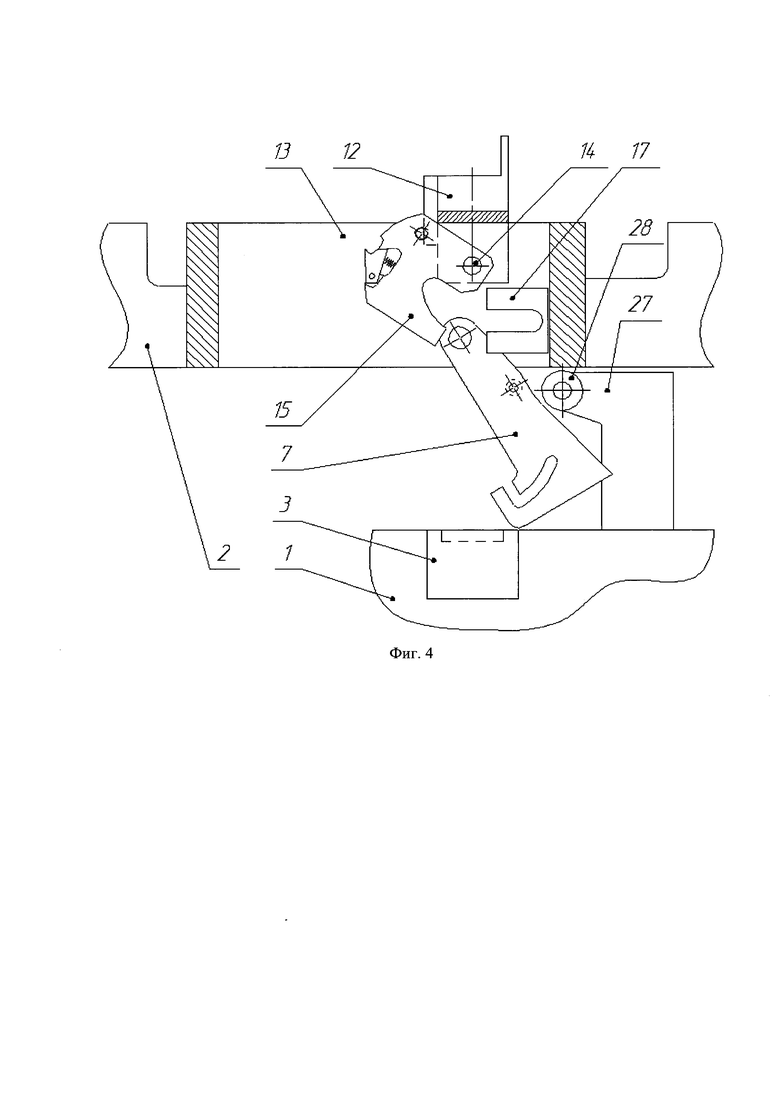
Фиг. 4 - Монтаж или демонтаж каретки (в продольном сечении по плоскости симметрии).
Фиг. 5 - Продольное сечение механизма электросоединителей по плоскости между боковой стенкой рамки и ловушкой в момент начала поворота каретки при штатном срабатывании.
Фиг. 6 - Продольное сечение механизма электросоединителей по плоскости между боковой стенкой рамки и ловушкой в заключительный момент после штатного срабатывания.
Механизм электросоединителя располагается между двумя объектами 1 и 2, сдвигаемыми в процессе работы (фиг. 1, 2).
Нижняя часть соединителя 3, например, розетка, вмонтирована в объект 1.
Верхняя часть соединителя 4, например, вилка, через силовую скобу 5 зацепляется цапфами 6 с серповидными пазами 20 каретки 7, состоящей из двух пластин 8, связанных между собой штангой 9 с выступами 10 (фиг. 2). На пластинах располагаются ролики 19 с возможностью вращения.
Верхняя часть 4 соединителя через силовую скобу 5 прижимается к нижней части 3 соединителя узлом прижима 11 (фиг. 2), завернутым по резьбе в кронштейн 12, прикрепленный к рамке 13 механизма осями 14. При этом контактные штыри верхней части 4 соединителя входят в соответствующие гнезда нижней части 3 соединителя.
Узел прижима 11 (фиг. 2) состоит из резьбовой втулки 21, через центр которой проходит шток 22. На конце штока закреплёт ролик 23 с возможностью вращения. Между торцевыми поверхностями уступов резьбовой втулки 21 и штока 22 сжата пружина 24. Удерживает узел прижима 11 в собранном состоянии завернутая на шток гайка 25 с клином 26, вставленным в паз на штоке, обеспечивая предварительное сжатие пружины 24. Клин 26 ориентирует узел прижима вдоль плоскости симметрии механизма за счет того, что входит в паз на кронштейне 12 (фиг. 1, 2). На передней боковой поверхности кронштейна закреплен, например, винтами, амортизатор 29, который может быть выполнен в виде демпфера или крешера.
К боковым стенкам рамки 13 осями 14 и винтами 16 крепятся симметрично две ловушки 15 (фиг. 1), представляющие собой пластины с подпружиненными собачками 30. За ловушками к боковым стенкам рамки 13 прикреплены, например, винтами или заклепками, две п-образные пластины 17 таким образом, что пазы ловушек и пазы п-образных пластин образуют единые поверхности качения 18, на которые опираются ролики 19 каретки 7.
За кареткой 7 (фиг. 1) на перемещаемом объекте 1 закреплены, например, винтами, симметрично два упора 27, подпирающие пластины 8 каретки 7 роликами 28, имеющими возможность вращения вокруг своих осей.
Ролик 23 узла прижима 11 (фиг. 2) имеет диаметр немного меньше внутреннего диаметра резьбы резьбовой втулки 21, это позволяет вкручивать узел прижима в кронштейн 12 при монтаже конструкции в условиях эксплуатации и выкручивать при демонтаже.
После демонтажа узла прижима 11 силовая скоба 5 в сборе с верхней частью 4 соединителя может быть демонтирована для проведения контрольных и ремонтных работ в условиях эксплуатации (фиг. 3).
Ловушки 15 имеют возможность поворота вокруг осей 14 при выкрученных винтах 16 (фиг. 4). При повернутых ловушках 15 каретка 7 может быть монтирована или демонтирована через образовавшееся пространство между ловушками 15 и п-образными пластинами 17.
Таким образом, конструкция обеспечивает простоту монтажа и демонтажа в условиях эксплуатации.
Для монтажа внутренних элементов механизма необходимо расположить ловушки 15 в верхнее положение (фиг. 4), вставить каретку 7 и зафиксировать ловушки 15 винтами 16. Затем опустить верхнюю часть 4 соединителя в сборе с силовой скобой 5 внутрь рамки 13 так, чтобы цапфы 6 силовой скобы 5 (фиг. 1) попали в вертикальные участки серповидных пазов 20 каретки 7, а контактные штыри в гнезда. Далее необходимо ввинтить узел прижима 11 в кронштейн 12 при помощи, например, гаечного ключа, полностью прижав верхнюю часть 4 соединителя к нижней части 3.
Демонтаж производится в обратном порядке:
Из кронштейна 12 выворачивается узел прижима 11 при помощи, например, гаечного ключа. Далее через резьбовое отверстие кронштейна 12 пропускается вспомогательная шпилька и заворачивается в специальное отверстие сверху силовой скобы 5 (фиг. 3). На противоположный конец шпильки надевается вспомогательная шайба и наворачивается вспомогательная гайка. Путем заворачивания вспомогательной гайки силовая скоба 5 в сборе с верхней частью 4 соединителя расстыковывается с нижней частью 3 соединителя. После того, как контактные штыри вышли из зацепления с контактными гнездами, вспомогательная шпилька выворачивается из силовой скобы 5 и силовая скоба 5 в сборе с верхней частью 4 соединителя вынимается из рамки 13 механизма. Далее (фиг. 4) выкручиваются винты 16, ловушки 15 поворачиваются в верхнее положение вокруг осей 14 и каретка 7 вынимается из рамки 13 механизма.
В режиме ожидания перед срабатыванием и при транспортировке в составе объектов предусмотрены конструктивные меры для компенсации смещений между объектами 1 и 2, вызванных погрешностями изготовления деталей, вибрациями, температурными деформациями объектов суточного и сезонного характера.
В вертикальном направлении компенсация осуществляется с помощью сжатия или разжатия пружины 24 узла прижима 11 в пределах зазора между клином 26 и торцем резьбовой втулки 21 (фиг. 2). При вертикальных колебаниях в режиме ожидания цапфы 6 силовой скобы 5 перемещаются в пределах вертикальных участков серповидных пазов 20 каретки 7, оставаясь с ней в зацеплении (фиг. 1).
В поперечном направлении для компенсации смещений предусмотрены зазоры между силовой скобой 5 и кареткой 7 (фиг. 2).
В продольном направлении (фиг. 1) для компенсации взаимных смещений объектов 1 и 2 предусмотрены горизонтальные пазы в п-образных пластинах 17, в которых перемещаются ролики 19 каретки 7, при этом сама каретка 7 остается заневоленной справа - роликами 28 упоров 27, слева - силовой скобой, касающейся штанги 9. На силовой скобе 5 для компенсации продольных смещений используется верхняя поверхность для качения ролика 23 узла прижима 11.
Штатное срабатывание механизма происходит следующим образом:
Объект 1 совместно с нижней 3 и верхней 4 частями соединителя, силовой скобой 5, упорами 27 начинает движение влево (фиг. 1), каретка 7, заневоленная цапфами 6 и роликами 28 упоров 27, также движется влево. При этом ролики 19 каретки 7 катятся по поверхностям качения 18 и перекатываются из п-образных пластин 17 в ловушки 15, где поверхности качения имеют траекторию с подъемом. Соответственно, каретка начинает двигаться не только влево, но и вверх, а цапфы 6 опускаются из вертикальных в радиусные части серповидных пазов 20. Сразу же после этого ролики 19 попадают в законцовки пазов ловушек 15 (фиг. 5) и далее каретка 7 уже больше не может поступательно двигаться вместе с объектом 1, но начинает поворачиваться по часовой стрелке вокруг осей роликов 19. К этому моменту ролик 23 узла прижима 11 скатывается с верхней поверхности силовой скобы 5 и не препятствует выниманию верхней части 4 соединителя из нижней части 3, узел прижима остается справа от силовой скобы 5. Каретка 7 поворачивается по часовой стрелке вокруг осей роликов 19 под воздействием роликов 28 упоров 27 и начинает поднимать силовую скобу 5 вместе с верхней частью 4 соединителя, при этом цапфы 6 силовой скобы скользят по радиусным участкам серповидных пазов 20, таким образом осуществляется компенсация различия в скоростях движения объекта 1 и каретки в области цапф 6. В итоге (фиг. 6) каретка 7 забрасывает силовую скобу 5 с верхней частью 4 соединителя внутрь рамки до удара в амортизатор 29, закрепленный на кронштейне 12, тем самым гася энергию удара и предотвращая разрушение или поломку конструктивных элементов. Для предупреждения обратного перемещения части 4 соединителя в зону движения объекта 1 на ловушках 15 предусмотрены подпружиненные собачки 30, фиксирующие выступы 10 штанги 9 каретки 7.
Таким образом, заявляемое изобретение «Механизм электросоединителя» позволяет производить монтаж и демонтаж элементов конструкции в условиях эксплуатации с применением распространенного слесарного инструмента, например, гаечных ключей, что достигнуто разбивкой конструкции на отдельные составные части, легко вынимаемые или вставляемые в конструкцию, повышает КПД конструкции путем снижения массы подвижной части, что становится возможным в результате укорочения траектории движения и в результате переноса части элементов с подвижной части конструкции на неподвижную.
Также заявляемое изобретение обеспечивает надежную работу конструкции за счет включения конструктивных элементов, компенсирующих смещения, вызываемые погрешностями изготовления деталей, вибрациями, температурными деформациями суточного и сезонного характера.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм электросоединителя | 2022 |
|
RU2791722C1 |
| Балочный держатель вертолетный многофункциональный | 2021 |
|
RU2773780C1 |
| СТЕНД СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ВЕРХНИЙ КОРСЕТ СТЕНДА, НИЖНИЙ КОРСЕТ СТЕНДА, МЕХАНИЗМ ПОПЕРЕЧНОГО ПЕРЕМЕЩЕНИЯ СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, МЕХАНИЗМ ПРОВОРОТА СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ПОДЪЕМНЫЙ МЕХАНИЗМ СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ХОДОВАЯ ОПОРНАЯ ТЕЛЕЖКА СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, СПОСОБ СБОРКИ ОБТЕКАТЕЛЯ НА СТЕНДЕ | 2008 |
|
RU2392201C1 |
| ЭЛЕКТРОСОЕДИНИТЕЛЬ ПАКЕТНЫЙ | 1998 |
|
RU2138890C1 |
| УСТРОЙСТВО ДЛЯ МОНТАЖА-ДЕМОНТАЖА И ТРАНСПОРТИРОВКИ НОСОВОГО ОБТЕКАТЕЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2006 |
|
RU2327616C1 |
| УСТРОЙСТВО ДЛЯ ПРАВКИ ФАСОННОГО АЛМАЗНОГО ШЛИФОВАЛЬНОГО КРУГА И СПОСОБ ПОДГОТОВКИ УСТРОЙСТВА К ПРОВЕДЕНИЮ ИЗМЕРЕНИЯ РЕЛЬЕФА ПРОФИЛЯ РАБОЧЕЙ ПОВЕРХНОСТИ (ВАРИАНТЫ) | 1999 |
|
RU2183547C2 |
| ЭЛЕКТРОСОЕДИНИТЕЛЬ | 1998 |
|
RU2136091C1 |
| Гибкая линия изготовления металлической тары | 1985 |
|
SU1328037A1 |
| ЭЛЕКТРИЧЕСКИЙ СОЕДИНИТЕЛЬ | 2000 |
|
RU2161354C1 |
| УГЛОВОЙ ПАТРУБОК (КОЖУХ) ЭЛЕКТРОСОЕДИНИТЕЛЯ | 2012 |
|
RU2519837C1 |
Изобретение относится к электрическим соединительным устройствам, состоящим по крайней мере из двух частей, а именно к дополнительным средствам для облегчения замыкания или размыкания соединяемых частей. Технический результат заключается в обеспечении надежной работы конструкции в условиях наличия смещений, вызываемых погрешностями изготовления деталей, вибрациями, температурными деформациями суточного и сезонного характера. Механизм электросоединителя располагается между двумя объектами, сдвигаемыми в процессе работы. Верхняя часть соединителя через силовую скобу зацепляется цапфами с серповидными пазами каретки, состоящей из двух пластин, связанных между собой штангой с выступами. На пластинах располагаются ролики с возможностью вращения. Верхняя часть соединителя через силовую скобу прижимается к нижней части соединителя узлом прижима, завернутым по резьбе в кронштейн, прикрепленный к рамке механизма осями. При этом контактные штыри верхней части соединителя входят в соответствующие гнезда нижней части соединителя. Узел прижима состоит из резьбовой втулки, через центр которой проходит шток, на конце которого закреплен ролик, а между торцевыми поверхностями уступов втулки и штока сжата пружина, удерживаемая клином, который входит в паз на кронштейне, на котором на передней боковой поверхности закреплен амортизатор. К боковым стенкам рамки осями и винтами крепятся симметрично две ловушки, представляющие собой пластины с подпружиненными собачками. За ловушками к боковым стенкам рамки прикреплены две п-образные пластины таким образом, что пазы ловушек и пазы п-образных пластин образуют единые поверхности качения, на которые опираются ролики каретки. За кареткой на перемещаемом объекте закреплены симметрично два упора, подпирающие пластины каретки роликами, имеющими возможность вращения вокруг своих осей. Ролик узла прижима имеет диаметр немного меньше внутреннего диаметра резьбы резьбовой втулки. 6 ил.
Механизм электросоединителя, содержащий две размыкаемые между собой части, рамку, штангу, пружину, ролики с возможностью вращения вокруг своих осей, серповидные пазы, состоящие из прямоугольной и радиальной частей, отличающийся тем, что верхняя часть соединителя через силовую скобу зацепляется цапфами с серповидными пазами каретки, состоящей из двух пластин, связанных между собой штангой с выступами, на пластинах располагаются ролики каретки с возможностью вращения, верхняя часть соединителя через силовую скобу прижимается к нижней части соединителя узлом прижима, завернутым по резьбе в кронштейн, прикрепленный к рамке механизма с осями, к боковым стенкам рамки осями и винтами симметрично крепятся две ловушки, представляющие собой пластины с подпружиненными собачками, за ловушками к боковым стенкам рамки прикреплены две п-образные пластины таким образом, что пазы ловушек и пазы п-образных пластин образуют единые поверхности качения, на которые опираются ролики каретки, за которой симметрично закреплены два упора, подпирающие пластины каретки роликами, при этом узел прижима состоит из резьбовой втулки, через центр которой проходит шток, на конце которого закреплен ролик, а между торцевыми поверхностями уступов втулки и штока сжата пружина, удерживаемая клином, который входит в паз на кронштейне, на котором на передней боковой поверхности закреплен амортизатор.
| Механизм электросоединителя | 2022 |
|
RU2791722C1 |
| СОЕДИНИТЕЛЬ | 2000 |
|
RU2201643C2 |
| ШТЕКЕРНЫЙ СОЕДИНИТЕЛЬ | 2014 |
|
RU2658319C2 |
| УНИВЕРСАЛЬНЫЙ ШАРНИР | 0 |
|
SU217153A1 |
| УЗЕЛ СТЫКОВКИ ЧАСТЕЙ ЭЛЕКТРОСОЕДИНИТЕЛЯ | 2022 |
|
RU2789079C1 |
| ЭЛЕКТРИЧЕСКИЙ СОЕДИНИТЕЛЬ | 2003 |
|
RU2256267C2 |
| US 3638167 A1, 25.01.1972 | |||
| DE 3634695 C2, 26.07.1990 | |||
| СПОСОБ МОДЕРНИЗАЦИИ АВТОМОБИЛЯ БРДМ-2 | 2019 |
|
RU2707432C1 |

