Данная заявка была подана в Патентное ведомство Китая 28 декабря 2022 г. с номером заявки 202211701150.6 под названием "Способ и устройство управления местоположением точки отключения цилиндра двигателя, считываемый носитель и система управления" для установления приоритета изобретения, все содержание которой включено в данную заявку путем использования ссылки.
Область техники
Заявка относится к технической области двигателей и, в частности, относится к способу и устройству управления местоположением точки отключения цилиндра, считываемому носителю и системе управления.
Предпосылки изобретения
Чтобы сократить время запуска двигателя, снизить уровень шума и повысить вероятность успешного запуска, часто используется генератор для управления положением остановки поршня в цилиндре при предыдущей остановке двигателя.
Однако в соответствующем техническом решении при управлении местоположением точки остановки двигателя он обычно останавливается за счет собственной инерции и нагрузок после отсечки подачи топлива и прекращения зажигания, поэтому местоположение точки остановки является случайным. Ввиду случайного местоположения точки остановки двигателя при следующем его запуске необходимо использовать другой крутящий момент. Однако на практике при запуске обычно используется одинаковый пусковой момент, что может повлиять на плавность работы двигателя.
Следует отметить, что информация, раскрытая на приведенном выше уровне техники, используется только для углубления понимания истории подачи данной заявки, поэтому может включаться информация, которая не относится к текущей технике, известной рядовому техническому персоналу в данной области техники.
Суть изобретения
Цель подачи заявления состоит в представлении способа и устройства управления местоположением точки отключения цилиндра, считываемого носителя и системы управления, чтобы в определенной степени обеспечить согласованность и плавность при следующем запуске двигателя.
Другие характеристики и преимущества данной заявки становятся очевидными благодаря следующему подробному описанию или могут быть частично получены на практике реализации данной заявки.
В соответствии с одним из аспектов варианта осуществления в настоящей заявке представлен один способ управления местоположением точки отключения цилиндра двигателя, который включает в себя следующие:
определение оборотов двигателя после получения запроса на отключение цилиндра от блока управления двигателем;
регулировку оборотов двигателя до достижения заданной частоты вращения в соответствии с диапазоном частот вращения, в который попадают обороты двигателя;
синхронизацию сигнала текущего положения двигателя по сигналу вращающегося трансформатора генератора при достижении оборотов двигателя до заданной частоты вращения, и регулировку положения вращающегося трансформатора до нахождения угла поворота коленвала двигателя в заданном диапазоне углов поворота.
В соответствии с одним из аспектов варианта осуществления в настоящей заявке представлено устройство управления местоположением точки отключения цилиндра двигателя, указанное устройство включает в себя:
модуль определения, который используется для определения оборотов двигателя после получения запроса на отключение цилиндра от блока управления двигателем;
первый модуль регулировки, который используется для регулировки оборотов двигателя до заданной частоты вращения в соответствии с диапазоном частот вращения, в который попадают обороты двигателя;
второй модуль регулировки, который используется для синхронизации сигнала текущего положения двигателя по сигналу вращающегося трансформатора генератора при достижении оборотов двигателя до заданного значения, и для регулировки положения вращающегося трансформатора до нахождения угла поворота коленвала двигателя в заданном диапазоне углов поворота коленвала.
В некоторых вариантах осуществления в настоящей заявке на основе вышеуказанного технического решения первый модуль регулировки также используется для определения того, превышают ли обороты двигателя над второй установленной частотой вращения, если обороты двигателя меньше или равны первой установленной частоте вращения; для регулировки оборотов двигателя до второй установленной частоты вращения, если обороты двигателя больше второй установленной частоты вращения; при этом первая установленная частота вращения больше, чем вторая установленная частота вращения.
В некоторых вариантах осуществления в настоящей заявке, на основе вышеуказанного технического решения первый модуль регулировки также используется для управления крутящим моментом или скоростью вращения генератора с целью регулировки оборотов двигателя до второй установленной частоты вращения.
В некоторых вариантах осуществления в настоящей заявке, на основе вышеуказанного технического решения первый модуль регулировки также используется для регулировки оборотов двигателя до первой установленной частоты вращения, если обороты двигателя выше первой установленной частоты вращения.
В некоторых вариантах осуществления в настоящей заявке, на основе вышеуказанного технического решения первый модуль регулировки также используется для управления крутящим моментом генератора с целью регулировки оборотов двигателя до первой установленной частоты вращения.
В некоторых вариантах осуществления в настоящей заявке, на основе вышеуказанного технического решения второй модуль регулировки также используется для регулировки оборотов двигателя до третьей установленной частоты вращения; при этом третья установленная частота вращения меньше второй установленной частоты вращения.
В некоторых вариантах осуществления в настоящей заявке на основе вышеуказанного технического решения приведенное устройство также включает в себя модуль управления, предназначенный для определения того, находится ли угол поворота коленвала двигателя в заданном диапазоне углов поворота коленвала; если угол поворота коленвала двигателя находится в заданном диапазоне углов поворота коленвала, заканчивается управление местоположением точки отключения цилиндра.
В некоторых вариантах осуществления в настоящей заявке, на основе вышеуказанного технического решения модуль управления также используется в случае, если угол поворота коленвала двигателя не находится в заданном диапазоне углов поворота коленвала, вновь отрегулируйте положение вращающегося трансформатора генератора до нахождения угла поворота коленвала двигателя в заданном диапазоне углов поворота коленвала.
В некоторых вариантах осуществления в настоящей заявке на основе вышеуказанного технического решения модуль управления также используется в случае, если угол поворота коленвала двигателя находится в заданном диапазоне углов поворота коленвала, управление следующим запуском двигателя осуществляется по первой кривой крутящего момента двигателя, первая кривая крутящего момента представляет собой кривую с использованием минимального выходного момента в качестве начального значения и с изменением выходного момента по мере изменения угла поворота коленвала.
В некоторых вариантах осуществления в настоящей заявке на основе вышеуказанного технического решения модуль управления также используется в случае, если угол поворота коленвала двигателя не находится в заданном диапазоне углов поворота коленвала, управление следующим запуском двигателя осуществляется по второй кривой крутящего момента двигателя, вторая кривая крутящего момента представляет собой кривую с использованием максимального выходного момента в качестве начального значения и с изменением выходного момента по мере изменения угла поворота коленвала.
В некоторых вариантах осуществления в настоящей заявке на основе вышеуказанного технического решения модуль управления также используется для получения информации о состоянии транспортного средства в целом и оставшемся уровне заряда; для расчета потока энергии транспортного средства в целом в соответствии с информацией о состоянии транспортного средства в целом и оставшемся уровне заряда аккумулятора; и для выхода из стратегии управления местоположения точки отключения цилиндра при принятии решения о запуске двигателя в соответствии с потоком энергии транспортного средства в целом.
В некоторых вариантах осуществления в настоящей заявке на основе вышеуказанного технического решения модуль определения также используется для отправки запроса на отключение в блок управления двигателем; после получения блоком управления двигателем запроса на отключение, блок управления двигателем управляет отсечкой подачи топлива в двигатель и прекращением зажигания и подает обратную связь по выполнению отключения цилиндров, чтобы получать команду о завершении отключения цилиндра.
В соответствии с одним из аспектов варианта осуществления в настоящей заявке представлена система управления, включающая в себя первый блок управления и второй блок управления, первый блок управления отправляет запрос во второй блок управления на отключение цилиндра, а второй блок управления выполняет работу по отключению цилиндра и дает обратную связь по выполнению отключения цилиндра первому блоку управления после завершения операции.
Первый блок управления определяет обороты двигателя после получения запроса на отключение цилиндров двигателя; регулирует обороты двигателя до достижения заданной частоты вращения в соответствии с диапазоном частот вращения, в который попадают обороты двигателя; синхронизирует сигнал текущего положения двигателя по сигналу вращающегося трансформатора генератора, когда обороты двигателя достигают заданной частоты вращения; регулирует положение вращающегося трансформатора генератора так, чтобы угол поворота коленвала двигателя находился в заданном диапазоне углов поворота коленвала.
При этом первый блок управления является блоком управления генератором, а второй блок управления является блоком управления двигателем.
В соответствии с одним из аспектов варианта осуществления в настоящей заявке представлен машиночитаемый носитель, на котором сохранена компьютерная программа, которая при выполнении процессором реализует способ управления местоположением точки отключения цилиндра двигателя, приведенный выше в техническом решении.
В соответствии с одним из аспектов варианта осуществления в настоящей заявке представлено электронное устройство, который включает в себя процессор; и запоминающее устройство для сохранения исполняемых процессором инструкций. При этом процессор сконфигурирован для выполнения способа управления местоположением точки отключения цилиндра двигателя путем исполнения реализуемых инструкций, приведенного выше в техническом решении.
В соответствии с одним из аспектов варианта осуществления в настоящей заявке представлен компьютерный программный продукт или компьютерная программа, который или которая включает в себя компьютерные инструкции, сохраненные на машиночитаемом носителе. Процессор компьютерного оборудования считывает компьютерную инструкцию с машиночитаемого носителя, и процессор выполняет компьютерную инструкцию, так что компьютерное оборудование выполняет способ управления местоположением точки отключения цилиндра двигателя, приведенный выше в техническом решении.
В техническом решении, представленном в варианте осуществления в настоящей заявке, при управлении местоположением точки отключения цилиндра двигателя сначала определяются обороты двигателя, контролируется генератор в зависимости от частоты вращения двигателя для регулировки оборотов двигателя до тех пор, пока обороты двигателя не будут отрегулированы до заданной частоты вращения. После регулировки оборотов двигателя до заданной частоты вращения синхронизируйте сигнал текущего положения двигателя по сигналу вращающегося трансформатора генератора, затем отрегулируйте положение вращающегося трансформатора генератора так, чтобы угол поворота коленвала двигателя находился в заданном диапазоне углов поворота коленвала. Таким образом, отрегулируйте положение вращающегося трансформатора генератора до нахождения угла поворота коленвала двигателя в заданном диапазоне углов поворота коленвала, так что каждый раз отключение цилиндра двигателя реализуется в каком-то относительно фиксированном диапазоне положений, что в определенной степени повышает точность выполнения отключения цилиндра двигателя. Кроме того, благодаря нахождению угла поворота коленвала двигателя в заданном диапазоне углов поворота коленвала следующий запуск двигателя может осуществляться с относительно согласованным пусковым моментом, что обеспечивает согласованность и плавность следующего запуска двигателя.
Следует понимать, что приведенное выше общее описание и следующее подробное описание являются только примерными и поясняющими и не устанавливают ограничения в отношении данной заявки.
Описание прилагаемых графических материалов
Фигуры графических изображений включены в данное описание и являются его частью, на которых показаны варианты осуществления в настоящей заявке, и вместе с описанием используются для объяснения принципов данной заявки. Очевидно, что прилагаемые фигуры графических изображений в следующем описании являются лишь некоторыми примерами вариантами осуществления в данной заявке, и другие фигуры могут быть получены рядовым техническим персоналом в данной области на основе приведенных фигур графических изображений без творческой работы.
На фиг. 1 схематично показана примерная блок-схема конструкции системы, к которой применимо техническое решение настоящей заявки.
На фиг. 2 схематично показан порядок управления местоположением точки отключения цилиндра двигателя, представленный в варианте осуществления в настоящей заявке.
На фиг. 3 схематично показан порядок регулировки оборотов двигателя до достижения заданной частоты вращения в соответствии с диапазоном частоты вращения, в котором находятся обороты двигателя.
На фиг. 4 схематично показан порядок управления местоположением точки отключения цилиндра двигателя, представленный в варианте осуществления в настоящей заявке.
На фиг. 5 схематично показан порядок реализации стратегии управления местоположением точки отключения цилиндра, представленный в варианте осуществления в настоящей заявке.
На фиг. 6 схематично показана блок-схема конструкции устройства управления местоположением точки отключения цилиндра двигателя, представленного в варианте осуществления в настоящей заявке.
На фиг. 7 схематично показана блок-схема структуры компьютерной системы электронного устройства, пригодного для реализации варианта осуществления в настоящей заявке.
Конкретные способы осуществления
Теперь дано более подробное описание конкретных способов осуществления в сочетании с фигурами графических изображений. Однако способы осуществления вариантов могут осуществляться различными способами и не должны рассматриваться как ограниченные примерами, изложенными в настоящей заявке; наоборот, данные способы осуществления делают настоящую заявку более развернутой и полной, полностью передают концепции способов осуществления вариантов техническому персоналу в данной области техники.
Кроме того, описанные характеристики, конструкция или свойства могут быть объединены любым подходящим способом в одном или нескольких вариантах осуществления. В нижеследующем описании приведены многочисленные конкретные детали, чтобы дать полное представление о вариантах осуществления в настоящей заявке. Однако технический персонал в данной области техники поймет, что техническое решение в настоящей заявке может быть реализовано на практике без одной или более конкретных деталей, или могут быть использованы другие способы, компоненты, устройства, шаги и т.д. В других случаях хорошо известные способы, устройства, реализации или операции, которые не показаны и не описаны подробно, чтобы не путать аспекты настоящей заявки.
Блок-схемы, показанные на фигурах графических изображений, являются только функциональными объектами и не обязательно соответствуют физически независимым объектам. То есть эти функциональные объекты могут быть реализованы в программном обеспечении, или в одном или нескольких аппаратных модулях или интегральных схемах, или в различных сетях и/или процессорных устройствах и/или микроблоке управления.
Технологические схемы, показанные на прилагаемых фигурах графических изображений, являются лишь иллюстративными и не обязательно включают все содержимое и операции / шаги, а также не обязательно должны выполняться в описанном порядке. Например, некоторые операции / шаги могут быть декомпозированы, в то время как другие могут быть объединены или частично объединены, так что реальный порядок выполнения может изменяться в зависимости от фактических обстоятельств.
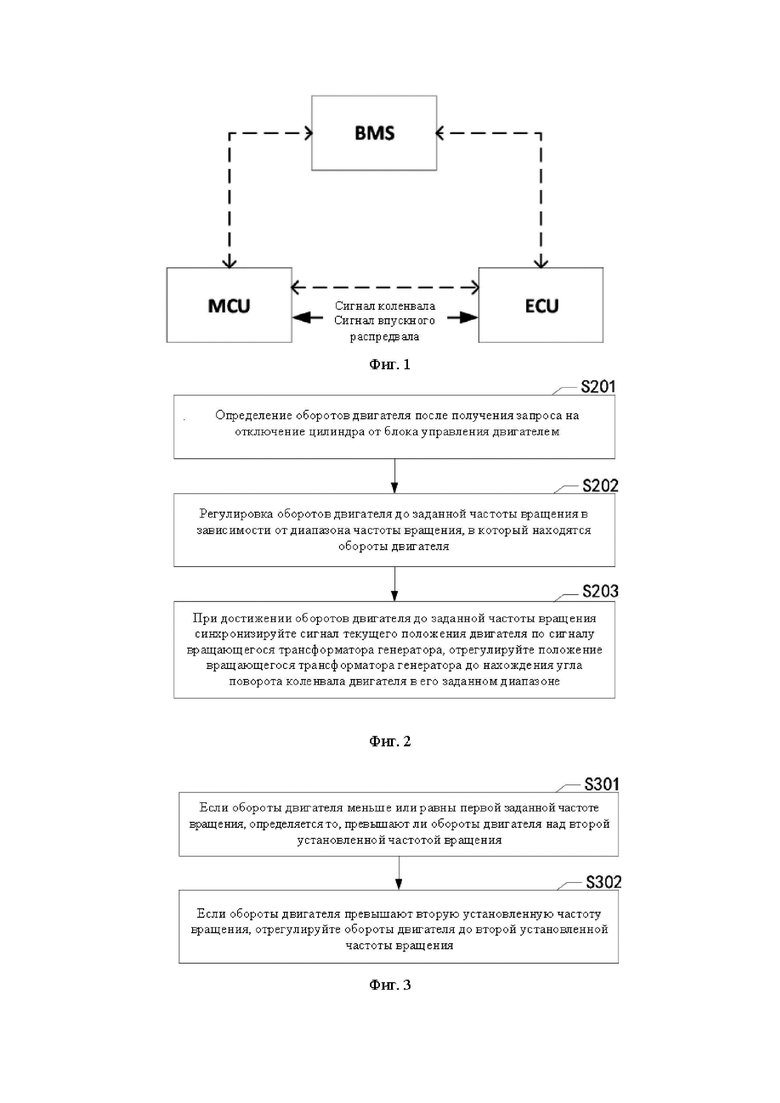
На фиг. 1 схематично показана примерная блок-схема конструкции системы, к которой применимо техническое решение в настоящей заявке.
Как показано на фиг. 1, конструкция системы 100 может включать в себя первый блок управления, второй блок управления и систему управления батареями (BMS). Система управления батареями соединена с первым блоком управления и вторым блоком управления с помощью CAN-шины, а первый блок управления и второй блок управления соединены с помощью жестких проводов для передачи сигналов коленвала и сигналов впускного распределительного вала.
Конкретный порядок работы заключается в том, что первый блок управления отправляет запрос на отключение цилиндра второму блоку управления, а второй блок управления выполняет отключение цилиндра и дает первому блоку управления обратную связь по выполнению отключения цилиндра. Первый блок управления определяет обороты двигателя после получения обратной связи по отключению цилиндра от блока управления двигателем. В соответствии с диапазоном, в котором находятся обороты двигателя, регулируются обороты двигателя до достижения заданной частоты вращения. Когда обороты двигателя достигают заданной частоты вращения, синхронизируйте сигнал текущего положения двигателя по сигналу вращающегося трансформатора генератора, отрегулируйте положение вращающегося трансформатора двигателя до нахождения угла поворота коленвала двигателя в заданном диапазоне углов поворота коленвала. Первый блок управления - это блок управления генератором (MCU), а второй блок управления - это блок управления двигателем (ECU).
Таким образом, за счет регулировки положения вращающегося трансформатора генератора угол поворота коленвала двигателя находится в заданном диапазоне углов поворота коленвала, так что каждый раз реализация отключения цилиндра двигателя выполнена в относительно фиксированном диапазоне положений, и точность отключения цилиндра двигателя повышается в определенной степени. Кроме того, благодаря нахождению угла поворота коленвала двигателя в заданном диапазоне углов поворота коленвала, в следующий раз двигатель может запускаться с относительно согласованным пусковым моментом, что обеспечивает согласованность и плавность следующего запуска двигателя.
Далее будут подробно описаны способ и устройство управления местоположением точки отключения цилиндра двигателя, считываемый носитель и система управления, представленные в данной заявке, в сочетании с вариантами конкретного выполнения.
См. фиг. 2, на фиг. 2 схематично показан порядок управления местоположением точки отключения цилиндра двигателя, представленный в варианте осуществления в настоящей заявке. Механизмом исполнения способа управления местоположением точки отключения цилиндра двигателя может быть первый блок управления, который в основном включает в себя следующие шаги с S201 по S03.
Шаг S201: После получения запроса на отключение цилиндра от блока управления двигателем определяются обороты двигателя.
Блок управления генератором MCU рассчитывает различные режимы работы транспортного средства в целом в зависимости от потока энергии. При изменении требуемого водителем выходного крутящего момента или при выполнении таких условий, как степень заряда аккумулятора SOC больше SOCmax, необходимо переключить режим работы транспортного средства с соответствующих режимов работы двигателя (таких как гибридный режим, режим выработки электроэнергии на стоянке, режим расширения запаса хода и т.д.) на исключительно электрический режим. В этом случае двигатель необходимо остановить. При этом MCU отправляет запрос на отключение цилиндра двигателя ENGINEstop-request в блок управления двигателем ECU через CAN-шину. После получения ECU запроса на отключение цилиндра, отсекается подача топлива и прекращается горение в цилиндре двигателя, осуществляется переход в реверсивный режим и после успешного завершения дается в MCU обратная связь по выполнению команды останова двигателя ENGINEstop-finished. После получения обратной связи по выполнению запроса на отключение цилиндра от блока управления двигателем, MCU определяет обороты двигателя. Таким образом, получение текущих оборотов двигателя полезно для последующего управления частотой вращения двигателя, чтобы осуществить окончательный контроль точки отключения цилиндра двигателя.
В варианте осуществления в настоящей заявке, при неудачном отключении цилиндра код ошибки ENGINEstop-error передается MCU по CAN-шине, и двигатель выполняет самоконтроль, и процесс управления точкой отключения цилиндра прекращен, MCU возобновляет процесс после выявления и устранения неисправности. Если двигатель выходит из строя и его необходимо срочно остановить, то после отсечки подачи топлива и прекращения зажигания соответствующий код неисправности и инструкция по завершению отключения цилиндра ENGINEstop-finished передаются в MCU по CAN-шине.
Шаг S202: В соответствии с диапазоном частот вращения, в котором находятся обороты двигателя, регулируйте обороты двигателя до достижения заданной частоты вращения.
После получения текущих оборотов двигателя генератор управляется для регулировки оборотов двигателя в соответствии с его различными частотами вращения до тех пор, пока обороты двигателя не будут отрегулированы до заданной частоты вращения, чтобы обеспечить быстрое регулирование оборотов двигателя и дальнейшее управление местоположением точки отключения цилиндра двигателя.
Шаг S203: Когда обороты двигателя достигнут заданной частоты вращения, синхронизируйте сигнал текущего положения двигателя по сигналу вращающегося трансформатора генератора, и отрегулируйте положение вращающегося трансформатора генератора таким образом, чтобы угол поворота коленвала двигателя находился в заданном диапазоне углов поворота коленвала.
Когда обороты двигателя достигнут заданной частоты вращения, необходимо синхронизировать сигнал текущего положения двигателя по сигналу вращающегося трансформатора генератора. Затем, путем регулировки положения вращающегося трансформатора генератора приводится угол поворота коленвала двигателя в заданный диапазон углов. Отрегулируйте положение вращающегося трансформатора генератора так, чтобы угол поворота коленвала двигателя находился в заданном диапазоне углов поворота коленвала (wl, w2), так что точка отключения цилиндра двигателя каждый раз попадает в относительно фиксированный диапазон положений, и точность местоположения точки отключения цилиндра двигателя в определенной степени повышается. Кроме того, при нахождении угла поворота коленвала двигателя в заданном диапазоне (wl, w2) пусковой момент становится наименьшим, а пуск более плавный, поскольку двигатель подвергается меньшему суммарному крутящему моменту. Таким образом, нахождение угла поворота коленвала двигателя в заданном диапазоне углов поворота обеспечивает согласованность и плавность повторного запуска двигателя.
В техническом решении, представленном в варианте осуществления в настоящей заявке, для управления местоположением точки отключения цилиндра двигателя сначала определяются обороты двигателя, и генератор управляется для регулировки оборотов двигателя в соответствии с различными его частотами вращения до тех пор, пока обороты двигателя не будут отрегулированы до заданной частоты вращения. После приведения оборотов двигателя к заданному значению синхронизируйте сигнал текущего положения двигателя по сигналу вращающегося трансформатора генератора, а затем отрегулируйте положение вращающегося трансформатора генератора так, чтобы угол поворота коленвала двигателя находился в заданном диапазоне углов поворота коленвала. Таким образом, каждый раз путем регулировки положения вращающегося трансформатора генератора до попадания угла поворота коленвала двигателя в заданный диапазон углов поворота коленвала обеспечивается нахождение местоположения точки отключения цилиндра двигателя в относительно фиксированном диапазоне, и точность местоположения точки отключения цилиндра двигателя в определенной степени повышается.
Кроме того, путем приведения угла поворота коленвала двигателя к заданному диапазону углов поворота коленвала в следующий раз двигатель может запускаться с относительно согласованным пусковым моментом, что обеспечивает согласованность и плавность следующего запуска двигателя.
В варианте осуществления в настоящей заявке обратитесь к фиг. 3, на фиг.3 схематично показан порядок регулирования оборотов двигателя до достижения заданной частоты вращения в соответствии с диапазоном частот вращения, в котором находятся обороты двигателя. В зависимости от диапазона частот вращения двигателя регулировка оборотов двигателя до заданной частоты вращения может в основном включать следующие шаги.
Шаг S301: Если обороты двигателя меньше или равны первой установленной частоте вращения, пожалуйста, определите, превышают ли обороты двигателя над второй установленной частотой вращения.
После получения данных о текущей частоте вращения двигателя оцените обороты двигателя и определите, в каком диапазоне частот вращения находятся текущие обороты двигателя. В зависимости от диапазона частот вращения, в котором находятся обороты двигателя, отрегулируйте обороты двигателя по-разному. Среди них первая установленная частота вращения относится к пороговому значению частоты вращения после входа в режим управления местоположением точки отключения цилиндра при высокой частоте вращения, данная первая установленная частота вращения соответствует режиму предварительного останова.
Шаг S302: Если обороты двигателя превышают над второй установленной частотой вращения, отрегулируйте обороты двигателя до второй установленной частоты вращения. При этом первая установленная частота вращения больше второй установленной частоты вращения.
Если обороты двигателя находятся между первой установленной частотой вращения и второй установленной частотой вращения, отрегулируйте обороты двигателя до второй установленной частоты вращения, чтобы быстро снизить частоту вращения.
Таким образом, когда обороты двигателя находятся в пределах интервала между первой установленной частотой вращения и второй установленной частотой вращения, отрегулируйте обороты двигателя до второй установленной частоты вращения для быстрого снижения частоты вращения.
В варианте осуществления в настоящей заявке регулировка оборотов двигателя до второй установленной частоты вращения включает в себя
регулировку оборотов двигателя до второй установленной частоты вращения за счет управления крутящим моментом или скоростью генератора.
Чтобы быстро отрегулировать обороты двигателя до второй установленной частоты вращения, за счет управления крутящим моментом или скоростью генератора отрегулируйте обороты двигателя до второй установленной частоты вращения. Конечно, для регулировки оборотов двигателя до второй установленной частоты вращения можно использовать и другие способы, которые здесь не ограничены. Таким образом, обеспечивается быстрая регулировка частоты вращения.
В варианте осуществления в настоящей заявке регулировка оборотов двигателя до заданной частоты вращения в соответствии с диапазоном оборотов, в котором находятся обороты двигателя, дополнительно включает в себя
регулировку оборотов двигателя до первой установленной частоты вращения, если обороты двигателя превышают первую установленную частоту вращения.
Таким образом, когда обороты двигателя превышают первую установленную частоту вращения, обороты двигателя могут регулироваться до первой установленной частоты вращения, чтобы быстро управлять местоположением точки отключения цилиндра и быстро достичь режима предварительного останова.
В варианте осуществления в настоящей заявке регулировка оборотов двигателя до первой установленной частоты вращения включает в себя
регулировку оборотов двигателя до первой установленной частоты вращения за счет управления крутящим моментом генератора.
Чтобы быстро отрегулировать обороты двигателя до первой заданной частоты вращения, за счет управления крутящим моментом генератора отрегулируйте обороты двигателя до первой заданной скорости. Конечно, для регулировки оборотов двигателя до первой заданной скорости можно использовать и другие способы, которые здесь не ограничены. Таким образом, реализуется быстрая регулировка частоты вращения.
В варианте осуществления в настоящей заявке после синхронизации сигнала текущего положения двигателя способ включает в себя
регулировку оборотов двигателя до третьей установленной частоты вращения;
При этом третья установленная частота вращения меньше второй установленной частоты вращения.
После синхронизации сигнала текущего положения двигателя непосредственно отрегулируйте текущие обороты двигателя до третьей установленной частоты вращения. Когда обороты двигателя достигают третьей установленной частоты вращения, контролируется точка отключения цилиндра двигателя, что полезно для повышения точности местоположения точки отключения цилиндра двигателя.
В варианте осуществления в настоящей заявке способ дополнительно включает в себя:
определение того, находится ли угол поворота коленвала двигателя в заданном диапазоне углов поворота коленвала;
заканчивание управления местоположением точки отключения цилиндра, если угол поворота коленвала двигателя попадает в заданный диапазон углов поворота коленвала.
После регулировки положения вращающегося трансформатора генератора для попадания угла поворота коленвала двигателя в заданный диапазон углов необходимо проверить результат регулировки, то есть проверить угол поворота коленвала двигателя. Если результат проверки показывает, что угол поворота коленвала двигателя находится в заданном диапазоне углов, считается, что крутящий момент на выходной части коленвала двигателя сводится к минимуму за счет приведения угла поворота коленвала двигателя к заданному диапазону углов поворота. Следовательно, генератор может запускать двигатель с моментом немного больше, чем выходной крутящий момент коленвала, то есть генератор может плавно запускать двигатель с относительно небольшим крутящим моментом, таким образом обеспечивается согласованность каждого запуска, и при этом заканчивается управление местоположением точки отключения цилиндра.
В варианте осуществления в настоящей заявке способ дополнительно включает в себя
повторную регулировку положения вращающегося трансформатора генератора для приведения соответствующего угла поворота двигателя к заданному диапазону углов поворота коленвала, если угол поворота коленвала двигателя не находится в заданном диапазоне углов поворота коленвала.
Если угол поворота коленвала двигателя не находится в заданном диапазоне углов поворота коленвала, положение вращающегося трансформатора генератора заново регулируется так, пока соответствующий угол поворота двигателя не находится в заданном диапазоне углов поворота коленвала. Таким образом обеспечивается нахождение угла поворота коленвала двигателя в заданном диапазоне углов поворота, чтобы крутящий момент на выходной части коленвала двигателя сводился к минимуму. Следовательно, генератор может запускать двигатель с моментом немного больше, чем выходной крутящий момент коленвала, то есть генератор может плавно запускать двигатель с относительно небольшим крутящим моментом, тем самым обеспечивается согласованность каждого запуска.
В варианте осуществления в настоящей заявке способ включает в себя
контроль следующего запуска двигателя по первой кривой крутящего момента, если угол поворота коленвала двигателя находится в заданном диапазоне углов поворота коленвала, здесь первая кривая крутящего момента представляет собой кривую с использованием минимального выходного крутящего момента в качестве начального значения и с изменением выходного крутящего момента по мере изменения угла поворота коленвала.
Если угол поворота коленвала двигателя находится в заданном диапазоне углов поворота коленвала, поставьте метку MOTORstatus=l. Прием блоком MCU сообщения MOTORstatus=1 означает успешное управление местоположением точки предыдущего отключения цилиндра, и при следующем запуске двигателя может нормально использоваться кривая с использованием (Tstart)min в качестве начального значения и с изменением крутящего момента по мере изменения угла поворота коленвала, то есть двигатель управляется по кривой с минимальным выходным крутящим моментом в качестве начального значения и с изменением выходного крутящего момента по мере изменения угла поворота коленвала.
Таким образом, если угол поворота коленвала двигателя находится в заданном диапазоне углов поворота коленвала, двигатель может запускаться плавно с меньшим крутящим моментом при следующем запуске, так что обеспечивается плавный переход состояний остановки и запуска и реализации плавного запуска и остановки.
В варианте осуществления в настоящей заявке способ включает в себя
контроль следующего запуска двигателя по второй кривой крутящего момента, если угол поворота коленвала двигателя не находится в заданном диапазоне углов поворота коленвала, здесь вторая кривая крутящего момента представляет собой кривую с использованием максимального выходного крутящего момента в качестве начального значения и с изменением выходного крутящего момента по мере изменения угла поворота коленвала.
Если угол поворота коленвала двигателя не находится в заданном диапазоне углов поворота коленвала, поставьте метку MOTORstatus=2. Прием блоком MCU сообщения MOTORstatus=2 означает ошибку в управлении местоположением точки предыдущего отключения цилиндра, и при следующем запуске двигателя может нормально использоваться кривая с использованием (Tstart)max в качестве начального значения и с изменением крутящего момента по мере изменения угла поворота коленвала, то есть двигатель управляется по кривой с максимальным выходным крутящим моментом в качестве начального значения и с изменением выходного крутящего момента по мере изменения угла поворота коленвала.Таким образом, если угол поворота коленвала двигателя не находится в заданном диапазоне углов поворота коленвала, в следующий раз необходимо запустить двигатель с большим крутящим моментом, чтобы двигатель мог быть запущен нормально.
В варианте осуществления в настоящей заявке способ дополнительно включает в себя:
получение информации о состоянии транспортного средства в целом и оставшемся уровне заряда аккумулятора;
расчет потока энергии транспортного средства в целом в соответствии с информацией о состоянии транспортного средства в целом и оставшемся уровне заряда аккумулятора;
выход из стратегии управления местоположением точки отключения цилиндра при принятии решения о запуске двигателя в зависимости от потока энергии транспортного средства в целом.
В период управления местоположением точки отключения цилиндра, если MCU рассчитает поток энергии в соответствии с состоянием транспортного средства в целом и оставшемся уровнем заряда аккумулятора, он примет решение о запуске двигателя. Если в стратегии управления местоположением точки отключения цилиндра возникает необходимость во внезапном запуске двигателя, то выйти из стратегии управления местоположением точки отключения цилиндра, и MCU использует кривую с (Tstart)max в качестве начального значения и с изменением крутящего момента по мере изменения угла поворота.
В варианте осуществления в настоящей заявке, перед получением оборотов двигателя, включается в себя
отправку запроса на останов в блок управления двигателем.
После получения блоком управления двигателем запроса на останов, блок управления двигателем управляет отсечкой подачи топлива и прекращением зажигания, и дается обратная связь по выполнению команды отключения цилиндра, чтобы получить команду завершения отключения цилиндра.
Таким образом, получение команды завершения отключения цилиндра полезно для последующего управления местоположением точки отключения цилиндра.
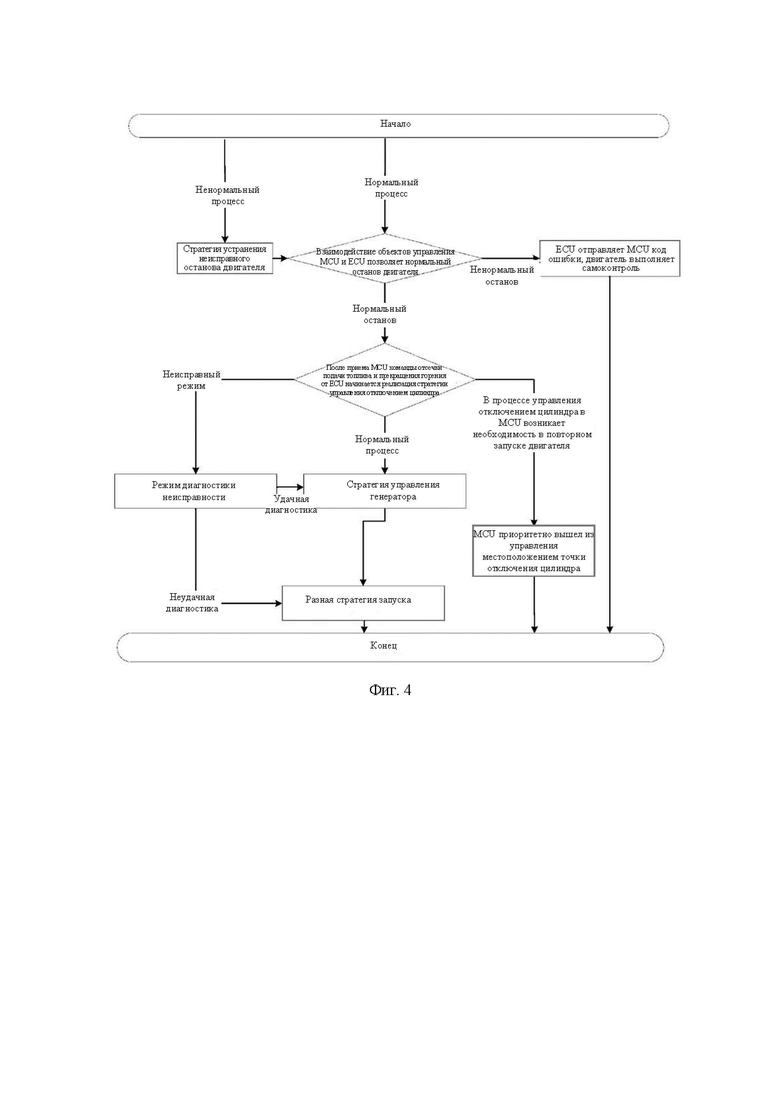
Чтобы понять техническое решение в данной заявке в целом, пожалуйста, обратитесь к фиг. 4, на фиг. 4 схематично показан порядок управления местоположением точки отключения цилиндра двигателя, представленный в варианте осуществления в настоящей заявке. Способ управления местоположением точки отключения цилиндра двигателя в основном может включать в себя следующие шаги.
Контролируйте взаимодействие между блоком управления генератором и блоком управления двигателем, чтобы обеспечить нормальную остановку двигателя.
В частности, что касается взаимодействия между блоком управления генератором и блоком управления двигателем, блок управления генератором MCU отправляет запрос на остановку двигателя ENGINEstop-request в блок управления двигателем ECU в соответствии с расчетом потока энергии. После того, как ECU получит запрос на отключение цилиндра, осуществляется отсечка подачи топлива и прекращение горения в цилиндре двигателя, в результате осуществляется переход в реверсивный режим.
При нормальном останове двигателя блок управления генератором получает запрос на отключение цилиндра от блока управления двигателем, и осуществляется переход в стратегию управления местоположением точки отключения цилиндра.
В частности, при нормальном останове двигателя MCU получает от ECU команду об отсечке подачи топлива и прекращении горения в цилиндре двигателя, то есть после успешного выполнения выдается обратная связь по выполнению отключения цилиндра ENGINEstop-finished в MCU.
Местоположение точки отключения цилиндра контролируется блоком управления генератором.
В частности, после того, как MCU получает обратную связь по выполнению отключения цилиндра ENGINEstop-finished от ECU, MCU начинает синхронизировать сигналы положения двигателя (включая сигналы коленвала и сигналы впускного распределительного вала), отправляемые от ECU по жесткому проводу, по сигналам вращающегося трансформатора двигателя, тем самым выполняется управление местоположением генератора по замкнутому циклу так, чтобы двигатель останавливался в соответствующем диапазоне углов поворота коленвала (wl,w2), и после успешного завершения работы поставлена метка MOTORstatus=l.
При неудачной синхронизации сигнала о положении двигателя осуществляется переход в режим диагностики синхронизации по сигналу. Если режим диагностики синхронизации по сигналу прошел успешно, двигатель остановится в диапазоне углов поворота коленвала (wl,w2) и после успешного завершения работы поставлена метка MOTORstatus=l. Если режим диагностики синхронизации прошел неуспешно, после завершения поставлена метка MOTORstatus=2.
Если в процессе управления местоположением точки отключения цилиндров возникает необходимость в повторном запуске двигателя, осуществляется выход из управления местоположением точки отключения цилиндров.
В частности, во время управления местоположением точки отключения цилиндра, если MCU рассчитывает поток энергии в соответствии с состоянием транспортного средства в целом и оставшимся уровнем заряда аккумулятора, он принимает решение о запуске двигателя. Если в стратегии управления местоположением точки отключения цилиндра возникает необходимость во внезапном запуске двигателя, осуществляется выход из стратегии управления местоположением точки отключения цилиндра, и MCU использует кривую с использованием (Tstart)max в качестве начального значения и с изменением крутящего момента по мере изменения угла поворота коленвала.
Определите стратегию следующего запуска двигателя в соответствии с местоположением точки отключения цилиндра.
В частности, получение блоком MCUMOTORstatus=1 означает успешное предыдущее управление местоположением точки отключения цилиндра, и кривая с (Tstart)min в качестве начального значения и с изменением крутящего момента по мере изменения угла поворота коленвала используется в обычном режиме при следующем запуске двигателя.
Получение блоком MCUMOTORstatus=2 означает неуспешное предыдущее управление местоположением точки отключения цилиндра, при следующем запуске двигателя используется кривая с (Tstart)max в качестве начального значения и с изменением крутящего момента по мере изменения угла поворота коленвала.
Обнулите MOTORstatus=0 для подготовки к следующему запуску и остановке двигателя.
При ненормальном запуске двигателя блок управления двигателем отправляет код ошибки на блок управления генератором.
В частности, при неудачном отключении цилиндра двигателя в MCU отправляется код ошибки ENGINEstop-error, и двигатель выполняет самоконтроль, и процесс управления местоположением точки отключения цилиндра прекращается, и MCU возобновляет процесс после выявления и устранения неисправностей.
Кроме того, если двигатель выходит из строя и его необходимо срочно остановить, после отсечки подачи топлива и прекращения зажигания в MCU будет отправлен соответствующий код ошибки и обратной связи по выполнению отключения цилиндра ENGINEstop-finished.
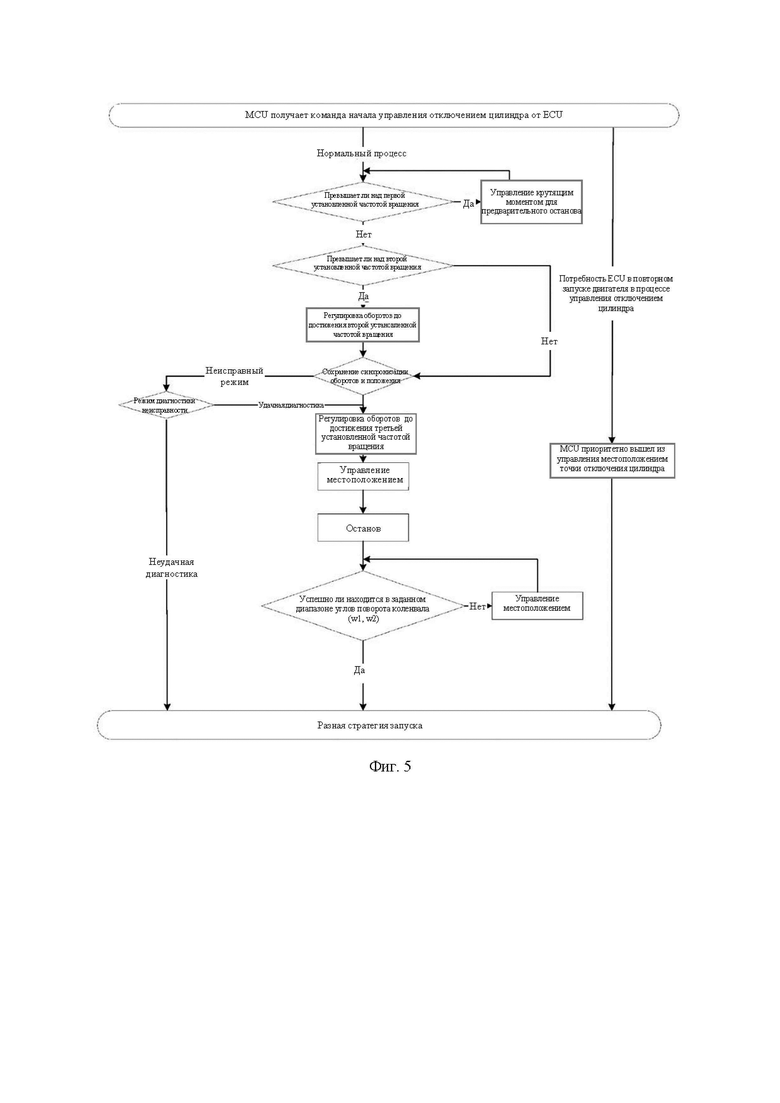
Что касается стратегии управления местоположением точки отключения цилиндра, в частности, обратитесь к фиг. 5, на фиг. 5 схематично показан порядок выполнения стратегии управления местоположением точки отключения цилиндра, представленный в варианте осуществления в настоящей заявке.
После того, как блок управления генератором получает запрос на отключение цилиндра от блока управления двигателем, осуществляется переход в режим отключения цилиндра.
Определяются обороты двигателя и оценивается то, превышают ли обороты двигателя над первой установленной частотой вращения.
Если обороты двигателя превышают первую установленную частоту вращения, за счет контроля крутящего момента регулируются обороты двигателя до первой установленной частоты вращения.
Если обороты двигателя не превышают первой установленной частоты вращения, обороты двигателя регулируются до второй установленной частоты вращения.
Синхронизируйте сигнал текущего положения двигателя по сигналу вращающегося трансформатора двигателя.
Установите обороты двигателя на третью установленную частоту вращения, отрегулируйте вращающийся трансформатор генератора и выполните останов двигателя.
После останова оцениваете то, что останавливается ли двигатель в заданном диапазоне углов поворота коленвала.
Если да, заканчивается управление отключением цилиндра.
Если нет, запустите двигатель для управления местоположением.
Следует отметить, что во время управления местоположением точки отключения цилиндра, если MCU рассчитает поток энергии в соответствии с состоянием транспортного средства в целом и оставшимся уровнем заряда аккумулятора, он примет решение о запуске двигателя. Если в стратегии управления местоположением точки отключения цилиндра возникнет необходимость во внезапном запуске двигателя, осуществляется выход из стратегии управления местоположением точки отключения цилиндра, MCU будет использовать кривую с использованием (Tstart)max в качестве исходного значения и с изменением крутящего момента по мере изменения угла поворота коленвала.
Следует отметить, что, хотя шаги выполнения способа в данной заявке описаны в определенном порядке на фигурах графических изображений, это не требует и не подразумевает, что эти шаги должны выполняться в указанном порядке, или все показанные шаги должны быть выполнены для достижения желаемых результатов. Можно добавить или пропустить некоторые шаги, или сделать их альтернативными, несколько шагов могут быть объединены в один шаг для выполнения и / или один шаг может быть разбит на несколько шагов для выполнения и т.д.
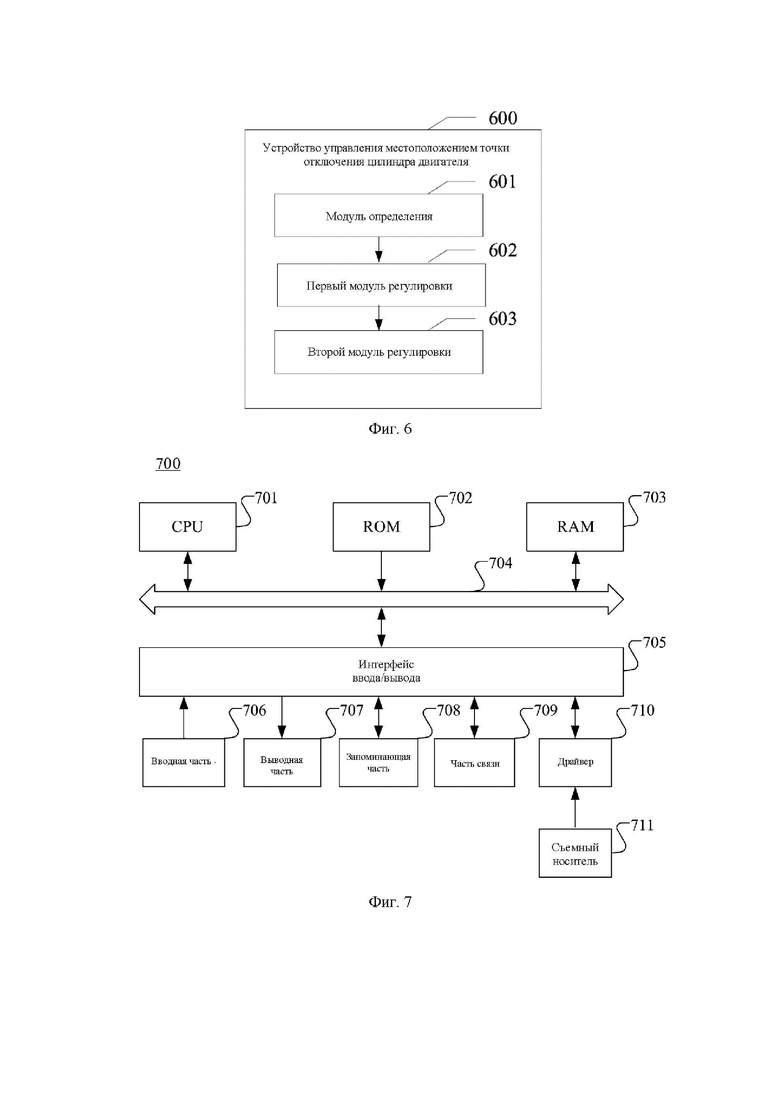
Ниже описан примерный вариант устройства в данной заявке, который может быть использован для выполнения способа управления местоположением точки отключения цилиндра двигателя, приведенного в варианте осуществления выше. На фиг. 6 схематично показана блок-схема конструкции устройства управления местоположением точки отключения цилиндра двигателя, представленного в варианте осуществления. Как показано на фиг. 6, устройство управления местоположением точки отключения цилиндра двигателя включает в себя:
модуль определения 601, который используется для определения оборотов двигателя после получения запроса на отключение цилиндра от блока управления двигателем;
первый модуль регулировки 602, который используется для регулировки оборотов двигателя до достижения заданной частоты вращения в соответствии с диапазоном частот вращения, в котором находятся обороты двигателя.
Второй модуль регулировки 603, который используется для синхронизации сигнала текущего положения двигателя по сигналу вращающегося трансформатора двигателя, когда обороты двигателя достигают заданной частоты вращения, регулируется положение вращающегося трансформатора генератора таким образом, чтобы угол поворота коленвала двигателя находился в заданном диапазоне углов поворота коленвала.
В некоторых вариантах осуществления в настоящей заявке, на основании вышеуказанного технического решения, первый модуль регулировки 602 дополнительно используется для определения того, превышают ли обороты двигателя над второй установленной частотой вращения, если обороты двигателя меньше или равны первой установленной частоте вращения; регулируются обороты двигателя до второй установленной частоты вращения, если обороты двигателя больше чем вторая установленная частота вращения; при этом первая установленная частота вращения больше, чем вторая установленная частота вращения.
В некоторых вариантах осуществления в настоящей заявке, на основании вышеуказанного технического решения, первый модуль регулировки 602 дополнительно используется для управления крутящим моментом или скоростью генератора с целью регулировки оборотов двигателя до второй установленной частоты вращения.
В некоторых вариантах осуществления в настоящей заявке, на основании вышеуказанного технического решения, первый модуль регулировки 602 дополнительно используется для регулировки оборотов двигателя до первой установленной частоты вращения, если обороты двигателя превышают первую установленную частоту вращения.
В некоторых вариантах осуществления в настоящей заявке, на основании вышеуказанного технического решения, первый модуль регулировки 602 дополнительно используется для управления крутящим моментом генератора с целью регулировки оборотов двигателя до первой установленной частоты вращения.
В некоторых вариантах осуществления в настоящей заявке, на основании вышеуказанного технического решения, второй модуль регулировки 603 дополнительно используется для регулировки оборотов двигателя до третьей установленной частоты вращения, при этом третья установленная частота вращения меньше чем вторая установленная частота вращения.
В некоторых вариантах осуществления в настоящей заявке, на основании вышеуказанного технического решения, устройство дополнительно включает в себя модуль управления, используемый для определения факта нахождения угла поворота коленвала двигателя в заданном диапазоне углов поворота коленвала; при нахождении угла поворота коленвала двигателя в заданном диапазоне углов поворота коленвала заканчивается управление местоположением точки отключения цилиндра.
В некоторых вариантах осуществления в настоящей заявке, на основании вышеуказанного технического решения, если угол поворота коленвала двигателя не находится в заданном диапазоне углов поворота коленвала, модуль управления используется еще для повторной регулировки положения вращающегося трансформатора генератора, чтобы угол поворота коленвала двигателя находился в заданном диапазоне углов поворота коленвала.
В некоторых вариантах осуществления в настоящей заявке, на основании вышеуказанного технического решения, если угол поворота коленвала двигателя находится в заданном диапазоне углов поворота коленвала, модуль управления дополнительно используется для контроля запуска двигателя по первой кривой крутящего момента, которая представляет собой кривую с использованием минимального выходного крутящего момента в качестве начального значения и с изменением крутящего момента по мере изменения угла поворота коленвала.
В некоторых вариантах осуществления в настоящей заявке, на основании вышеуказанного технического решения, если угол поворота коленвала двигателя не находится в заданном диапазоне углов поворота коленвала, модуль управления дополнительно используется для контроля запуска двигателя по второй кривой крутящего момента, которая представляет собой кривую с использованием максимального выходного крутящего момента в качестве начального значения и с изменением крутящего момента по мере изменения угла поворота коленвала.
В некоторых вариантах осуществления в настоящей заявке, на основании вышеуказанного технического решения, модуль управления дополнительно используется для получения информации о транспортном средстве в целом и оставшемся уровне заряда, и для расчета потока энергии транспортного средства в целом в зависимости от информации о транспортном средстве в целом и оставшегося уровня заряда, а также для выхода из стратегии управления местоположением отключения цилиндра при принятии решения о запуске двигателя в зависимости от потока энергии транспортного средства в целом.
В некоторых вариантах осуществления в настоящей заявке, на основании вышеуказанного технического решения, модуль получения 601 дополнительно используется для подачи запроса на останов двигателя в блок его управления. После получения блоком управления двигателем запроса на останов двигателя контролируется отсечка подачи топлива и прекращение горения в цилиндре двигателя с помощью блока управления двигателем, выдается обратная связь по выполнению отключения цилиндра, в результате получается команда завершения отключения цилиндра.
Конкретные детали устройства управления местоположением точки отключения цилиндра двигателя, представленные в каждом варианте осуществления в настоящей заявке, были подробно описаны в соответствующих вариантах осуществления способа и здесь повторяться не будут.
На фиг. 7 схематично показана блок-схема структуры компьютерной системы электронного устройства для реализации варианта осуществления в настоящей заявке.
Следует отметить, что компьютерная система 700 с электронным устройством, показанным на фиг. 7, является лишь примером, не накладывающим никакие ограничения на функции и диапазон применения, представленные в варианте осуществления в настоящей заявке.
Как показано на фиг. 7, компьютерная система 700 включает в себя центральный процессор 701 (Central Processing Unit, CPU), который может выполнять различные соответствующие действия и процессы в соответствии с программой, сохраненной в постоянном запоминающем устройстве 702 (Read-Only Memory, ROM), или программой, загруженной из секции сохранения 708 в запоминающее устройство с произвольным доступом 703 (Random Access Memory, RAM). В запоминающем устройстве с произвольным доступом 703 также хранятся различные программы и данные, необходимые для работы системы. Центральный процессор 701, постоянное запоминающее устройство 702 и запоминающее устройство с произвольным доступом 703 соединены друг с другом через шину 704. Интерфейс ввода-вывода 705 (интерфейс I/O) также подключен к шине 704.
К интерфейсу ввода/вывода 705 подключены следующие компоненты: вводная часть 706, включающая в себя клавиатуру, мышь и т.д.; и выводная часть 707, включающая в себя электронно-лучевую трубку (Cathode Ray Tube, CRT), жидкокристаллический дисплей (Liquid Crystal Display, LCD) и динамик; и запоминающая часть 708, включающая в себя жесткий диск или т.д.; и часть связи 709, включающий в себя карты сетевого интерфейса, такие как карта локальной сети, модем и т.д. Часть связи 709 выполняет обработку связи через сеть, такую как Интернет. Драйвер 710 также подключен к интерфейсу ввода-вывода 705 по мере необходимости. Съемные носители 711, такие как магнитный диск, оптический диск, магнитооптический диск, полупроводниковая память и т.д., устанавливаются на драйвер 710 по мере необходимости, так что считанная с них компьютерная программа может быть установлена в запоминающую часть 708 по мере необходимости.
В частности, согласно вариантам осуществления в настоящей заявке, процессы, описанные в соответствующих блок-схемах способов, могут быть реализованы в виде компьютерных программ. Например, вариант осуществления в настоящей заявке включает в себя компьютерные программные продукты, включая компьютерные программы на машиночитаемом носителе, которые содержат программные коды для выполнения способа, показанного на блок-схеме. В таком варианте осуществления компьютерная программа может быть загружена и установлена из сети через часть связи 709 и / или установлена со съемного носителя 711. Когда компьютерная программа выполняется центральным процессором 701, выполняются различные функции, определенные в системе настоящей заявки.
Следует отметить, что машиночитаемый носитель, показанный в варианте осуществления в данной заявке, может быть машиночитаемым носителем сигнала или машиночитаемым запоминающим носителем или любой комбинацией того и другого. Машиночитаемым носителем может быть, например, но не ограничиваясь этим, электрическая, магнитная, оптическая, электромагнитная, инфракрасная или полупроводниковая система, устройство или элемент или любая комбинация вышеперечисленных. Более конкретные примеры машиночитаемых носителей могут включать в себя, но не ограничиваются ими, электрическое соединение с одним или несколькими проводами, портативный компьютерный магнитный диск, жесткий диск, запоминающее устройство с произвольным доступом (RAM), постоянное запоминающее устройство (ROM), стираемое программируемое постоянное запоминающее устройство (Erasable Programmable Read Only Memory, EPROM), флэш-память, оптические волокна, постоянное запоминающее устройство на компакт-диске (Compact Disc Read-Only Memory, CD-ROM), оптическое запоминающее устройство, магнитное запоминающее устройство или любая подходящая комбинация вышеперечисленных. В данной заявке машиночитаемым носителем может быть любой материальный носитель, содержащий или сохраняющий программу, которая может использоваться системой, устройством или элементом для выполнения команд или в сочетании с ними. В данной заявке машиночитаемый носитель сигнала может включать в себя сигналы данных, распространяемых в базисной полосе или как часть несущей волны, в которых содержатся машиночитаемые программные коды. Распространенные таким образом сигналы данных могут принимать различные формы, включая, но не ограничиваясь ими, электромагнитные сигналы, оптические сигналы или любую подходящую комбинацию вышеперечисленных. Машиночитаемым носителем сигнала также может быть любой машиночитаемый носитель, отличный от машиночитаемого запоминающего носителя, машиночитаемый носитель может отправлять, распространять или передавать программу для использования исполняющей команды системой, устройством или элементом или программу в сочетании с ними. Программные коды, содержащиеся на машиночитаемом носителе, могут быть переданы любым подходящим носителем, включая, но не ограничиваясь этим, беспроводный, проводной и т.д., или любая подходящая комбинация вышеперечисленных.
На технологических схемах и блок-схемах, показанных на фигурах графических изображений, даны возможные системные структуры, функции и операции для реализации систем, способов и компьютерных программных продуктов, представленных в различных вариантах осуществления в настоящей заявке. В связи с этим каждый блок в технологической схеме или блок-схеме может представлять собой модуль, сегмент программы или часть кода, которые содержат одну или более исполняемых инструкций для реализации указанных логических функций. Следует также отметить, что в некоторых альтернативных вариантах функции, указанные в блоках, могут выполняться в порядке, отличном от показанного на фигурах графических изображений порядка. Например, два блока, представленные последовательно, могут фактически выполняться по существу параллельно, и иногда они могут выполняться в обратном порядке, в зависимости от задействованных функций. Следует также отметить, что каждый блок в блок-схеме или технологической схеме и комбинации блоков в блок-схеме или технологической схеме могут быть реализованы с помощью специализированной аппаратной системы, выполняющей заданные функции или операции, или могут быть реализованы с помощью комбинации специализированного аппаратного обеспечения и компьютерных инструкций.
Следует отметить, что, хотя в приведенном выше подробном описании упомянуто несколько модулей или блоков для выполнения действий, такое разделение не является обязательным. Фактически, в соответствии со способом осуществления в настоящей заявке характеристики и функции двух или более модулей или блоков, описанных выше, могут быть реализованы в одном модуле или блоке. Наоборот, характеристики и функции одного модуля или блока, описанного выше, могут быть дополнительно разделены и реализованы несколькими модулями или блоками.
Благодаря описанию вышеуказанных конкретных способов осуществления технический персонал в данной области техники легко понимает, что описанные здесь конкретные способы осуществления могут быть реализованы с помощью программного обеспечения или путем объединения программного обеспечения с необходимым аппаратным обеспечением. Следовательно, техническое решение в способе осуществления в данной заявке может быть реализовано в виде программного продукта, который может храниться на энергонезависимом носителе (такой как CD-ROM, USB-флэш-накопитель, внешний жесткий диск и т.д.) или в сети, и включает в себя несколько инструкций по выполнению способа в вычислительной технике (такой как персональный компьютер, сервер, сенсорный терминал или сетевое устройство и т.д.) в соответствии со способом, приведенным в варианте осуществления в данной заявке.
Техническому персоналу в данной области техники будет легко придумать другие варианты осуществления после рассмотрения описания и применения на практике раскрытого здесь изобретения. Данная заявка предназначена для того, чтобы охватить любые ее модификации, назначения или адаптационные изменения, соответствующие общим принципам данной заявки и включающие здравый смысл и элементарные знания или распространенные технические средства в этой технической области, хотя они не раскрыты в данной заявке.
Следует понимать, что данная заявка не ограничивается точной структурой, описанной выше и показанной на фигурах графических изображений, и различными модификациями и изменениями без выхода за рамки ее применения. Область применения данной заявки ограничена только прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ, УСТРОЙСТВО, ЧИТАЕМЫЙ НОСИТЕЛЬ И СИСТЕМА УПРАВЛЕНИЯ ДЛЯ КОНТРОЛЯ ПОЛОЖЕНИЯ ОСТАНОВКИ ЦИЛИНДРА ДВИГАТЕЛЯ | 2023 |
|
RU2841094C2 |
| СПОСОБ ДИАГНОСТИКИ ТОПЛИВНЫХ ФОРСУНОК | 2011 |
|
RU2568373C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЗАПУСКОМ ДВИГАТЕЛЯ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2560222C1 |
| СПОСОБ РАБОТЫ ДВИГАТЕЛЯ (ВАРИАНТЫ), СИСТЕМА УПРАВЛЕНИЯ ДВИГАТЕЛЕМ | 2013 |
|
RU2640146C2 |
| ПОРШНЕВОЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ДВИГАТЕЛЬ | 2004 |
|
RU2278297C1 |
| СПОСОБ АНАЛИЗА МОДЕЛИРОВАНИЯ ДЛЯ СЕТИ УПРАВЛЕНИЯ УСТРОЙСТВАМИ И СПОСОБ ОБНОВЛЕНИЯ МОДЕЛИ СЕТИ | 2022 |
|
RU2826512C1 |
| КОНТРОЛЛЕР ЗАПУСКА И СПОСОБ УПРАВЛЕНИЯ ЗАПУСКОМ | 2019 |
|
RU2707162C1 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ИНТЕЛЛЕКТУАЛЬНЫМ УНИТАЗОМ | 2015 |
|
RU2644096C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2015 |
|
RU2632931C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ НАКОПИТЕЛЬНЫМ УСТРОЙСТВОМ | 2012 |
|
RU2628527C2 |
Изобретение относится к управлению двигателями внутреннего сгорания, а именно к способу, устройству, читаемому носителю и системе управления для управления местоположением точки отключения цилиндра двигателя. Техническим результатом является обеспечение контроля положения остановки цилиндра двигателя для выполнения последующего плавного запуска двигателя. Результат достигается тем, что определяют обороты двигателя после получения запроса на отключение цилиндра от блока управления двигателем; регулируют обороты двигателя до заданной частоты вращения в соответствии с диапазоном частот вращения, в который попадают обороты двигателя; синхронизируют сигнал текущего положения двигателя по сигналу вращающегося трансформатора генератора при достижении оборотов двигателя до заданной частоты вращения и выполняют регулировку положения вращающегося трансформатора до нахождения угла поворота коленвала двигателя в заданном диапазоне углов поворота. 4 н. и 11 з.п. ф-лы, 7 ил.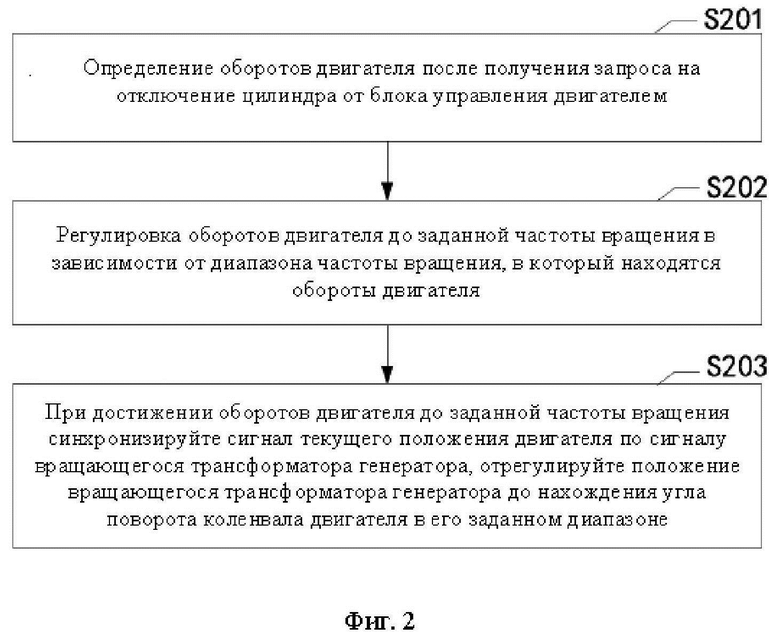
1. Способ управления местоположением точки отключения цилиндра двигателя, отличающийся тем, что включает в себя:
определение оборотов двигателя после получения запроса на отключение цилиндра от блока управления двигателем;
регулировку оборотов двигателя до достижения заданной частоты вращения в соответствии с диапазоном частот вращения, в котором находятся обороты двигателя;
синхронизацию сигнала текущего положения двигателя по сигналу вращающегося трансформатора генератора, когда обороты двигателя достигают заданной частоты вращения, и регулировку положения вращающегося трансформатора генератора так, чтобы угол поворота коленвала двигателя находился в заданном диапазоне углов поворота коленвала.
2. Способ управления местоположением точки отключения цилиндра двигателя по п. 1, отличающийся тем, что регулировка оборотов двигателя до достижения заданной частоты вращения в соответствии с диапазоном оборотов двигателя включает в себя:
оценку того, что превышают ли обороты двигателя над второй установленной частотой вращения, если обороты двигателя меньше или равны первой установленной частоте вращения;
регулировку оборотов двигателя до второй установленной частоты, если обороты двигателя больше второй установленной частоте вращения;
при этом указанная первая установленная частота вращения больше второй установленной частоты вращения.
3. Способ управления местоположением точки отключения цилиндра двигателя по п. 2, отличающийся тем, что регулировка оборотов двигателя до второй установленной частоты вращения включает в себя
регулировку оборотов двигателя до второй установленной частоты вращения за счет управления крутящим моментом или скоростью генератора.
4. Способ управления местоположением точки отключения цилиндра двигателя по п. 2, отличающийся тем, что регулировка оборотов двигателя до заданной частоты вращения в соответствии с диапазоном частот вращения, в котором находятся обороты двигателя, дополнительно включает в себя
регулировку оборотов двигателя до первой установленной частоты вращения, если обороты двигателя превышают первую установленную частоту вращения.
5. Способ управления местоположением точки отключения цилиндра двигателя по п. 4, отличающийся тем, что регулировка оборотов двигателя до первой установленной частоты вращения включает в себя
регулировку оборотов двигателя до первой установленной частоты вращения за счет управления крутящим моментом генератора.
6. Способ управления местоположением точки отключения цилиндра двигателя по п. 2, отличающийся тем, что после синхронизации сигнала текущего положения двигателя, включает в себя
регулировку оборотов двигателя до третьей установленной частоты вращения;
при этом третья установленная частота вращения меньше, чем вторая установленная частота вращения.
7. Способ управления местоположением точки отключения цилиндра двигателя по п. 1, отличающийся тем, что дополнительно включает в себя:
определение того, останавливается ли угол поворота коленвала двигателя в заданном диапазоне углов поворота коленвала;
заканчивание управления местоположением точки отключения цилиндра, если угол поворота коленвала двигателя находится в заданном диапазоне углов поворота коленвала.
8. Способ управления местоположением точки отключения цилиндра двигателя по п. 7, отличающийся тем, что дополнительно включает в себя
повторную регулировку положения вращающегося трансформатора генератора до нахождения угла поворота коленвала двигателя в заданном его диапазоне, если угол поворота коленвала двигателя не находится в заданном диапазоне углов поворота коленвала.
9. Способ управления местоположением точки отключения цилиндра двигателя по п. 1, отличающийся тем, что дополнительно включает в себя
управление следующим запуском двигателя в соответствии с первой кривой крутящего момента, если угол поворота коленвала двигателя находится в заданном диапазоне углов поворота коленвала, здесь первая кривая крутящего момента является кривой с использованием минимального выходного крутящего момента в качестве начального значения и с изменением крутящего момента по мере изменения угла поворота коленвала.
10. Способ управления местоположением точки отключения цилиндра двигателя по п. 9, отличающийся тем, что дополнительно включает в себя
управление следующим запуском двигателя в соответствии со второй кривой крутящего момента, если угол поворота коленвала двигателя не находится в заданном диапазоне углов поворота коленвала, здесь вторая кривая крутящего момента является кривой с использованием максимального выходного крутящего момента в качестве начального значения и с изменением крутящего момента по мере изменения угла поворота коленвала.
11. Способ управления местоположением точки отключения цилиндра двигателя по п. 1, отличающийся тем, что дополнительно включает в себя:
получение информации о состоянии транспортного средства в целом и оставшемся уровне заряда;
расчет потока энергии транспортного средства в целом в соответствии с информацией о состоянии транспортного средства в целом и оставшемся уровне заряда;
выход из стратегии управления местоположением точки отключения цилиндра при принятии решения о запуске двигателя в зависимости от потока энергии транспортного средства в целом.
12. Способ управления местоположением точки отключения цилиндра двигателя по п. 1, отличающийся тем, что до получения оборотов двигателя включает в себя:
отправку на останов на блок управления двигателем;
управление отсечкой подачи топлива и прекращением зажигания и выдачу обратной связи по выполнению отключения цилиндра для получения команды завершения отключения цилиндра после приема блоком управления двигателем запроса на останов блок управления двигателем.
13. Устройство управления местоположением точки отключения цилиндра двигателя отличающееся тем, что устройство включает в себя:
модуль определения, который используется для определения оборотов двигателя после получения запроса на отключение цилиндра двигателя от блока управления двигателем;
первый модуль регулировки, который используется для регулировки оборотов двигателя в соответствии с диапазоном частот вращения, в котором находятся обороты двигателя, до достижения заданной частоты вращения;
второй модуль регулировки, который при достижении оборотов двигателя до заданной частоты вращения используется для синхронизации сигнала текущего положения двигателя по сигналу вращающегося трансформатора генератора и регулировки положения вращающегося трансформатора генератора до попадания угла поворота коленвала двигателя в заданный его диапазон.
14. Машиночитаемый носитель, отличающийся тем, что на машиночитаемом носителе сохранена компьютерная программа, и компьютерная программа выполняется процессором для реализации способа управления местоположением точки отключения цилиндра двигателя по любому из пп. 1-12.
15. Система управления, отличающаяся тем, что она включает в себя первый блок управления и второй блок управления, первый блок управления отправляет запрос на отключение цилиндра второму блоку управления, а второй блок управления выполняет отключение цилиндра и дает обратную связь по выполнению отключения цилиндра первому блоку управления после завершения данной операции;
первый блок управления определяет обороты двигателя после получения запроса от блока управления двигателем на отключение цилиндра; в соответствии с диапазоном частот вращения, в котором находятся обороты двигателя, регулируются обороты двигателя до достижения заданной частоты вращения; когда обороты двигателя достигают заданной частоты вращения, сигнал текущего положения двигателя синхронизируется по сигналу вращающегося трансформатора двигателя, и положение вращающегося трансформатора двигателя регулируется до попадания угла поворота коленвала двигателя в заданный диапазон углов поворота коленвала;
при этом первый блок управления является блоком управления генератором, а второй блок управления является блоком управления двигателем.
| CN 114194175 A, 2022.03.18 | |||
| US 2022247332 A1, 2022.08.04 | |||
| US 9421970 B2, 2016.08.23 | |||
| CN 101181897 A, 2008.05.21 | |||
| US 2020355152 A1, 2020.11.12 | |||
| ГИБРИДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ ЕГО УПРАВЛЕНИЯ | 2020 |
|
RU2741526C1 |

