Данная заявка заявляет приоритет на китайскую патентную заявку с номером 202211702570.6, поданную 28 декабря 2022 года, на изобретение под названием «Способ, устройство, читаемый носитель и система управления для контроля положения остановки цилиндра двигателя», содержание которой полностью включено в настоящую заявку посредством ссылки.
Область техники
Данное изобретение относится к области техники двигателей, а именно к способу, устройству, читаемому носителю и системе управления для контроля положения остановки цилиндра двигателя.
Уровень техники
С целью сокращения времени запуска двигателя, снижения уровня шума и повышения вероятности успешного запуска, обычно осуществляют контроль положения остановки поршня в цилиндре двигателя с помощью генератора в момент его первой остановки
Однако в соответствующих технических решениях, при управлении положением остановки двигателя, обычно после прекращения подачи топлива и искры, двигатель останавливается за счет собственной инерции и нагрузки, что делает положение остановки достаточно произвольным. Поскольку положение остановки двигателя относительно случайное, при следующем запуске двигателя необходимо использовать другой крутящий момент для запуска. Однако в практическом применении обычно задается одинаковый крутящий момент для запуска, что в таком случае может нарушить плавность работы двигателя.
Следует отметить, что информация, раскрытая в вышеупомянутой части фоновых технологий, предназначена только для усиления понимания контекста данной заявки, поэтому она может включать сведения, которые не составляют известную для специалистов в данной области существующую технологию.
Сущность изобретения
Цель настоящего изобретения заключается в предоставлении способа, устройства, читаемого носителя и системы управления для контроля положения остановки цилиндра двигателя, которые в определенной степени обеспечивают постоянство и плавность при следующем запуске двигателя.
Другие особенности и преимущества данного изобретения станут более ясными из последующего подробного описания или будут частично осознаны по мере практического применения данного изобретения.
В соответствии с одним из аспектов вариантов осуществления настоящего изобретения предлагается способ управления положением остановки двигателя, который включает в себя следующее:
После получения команды управления положением остановки цилиндра, отправленной контроллером транспортного средства, получают скорость вращения двигателя;
В зависимости от диапазона скорости вращения двигателя, в котором находится указанный двигатель, регулируют его вращения до достижения заданной скорости;
При достижении скорости вращения указанного двигателя заданной скорости, синхронизируют текущий сигнал положения двигателя с сигналом резольвера электродвигателя и регулируют позицию резольвера электродвигателя, чтобы угол поворота коленчатого вала двигателя остановился в предустановленном диапазоне углов поворота коленчатого вала
В соответствии с одним из аспектов вариантов осуществления настоящего изобретения предлагается устройство управления положением остановки цилиндра двигателя, включающее в себя:
Модуль получения, предназначенный для получения скорости вращения двигателя после получения команды управления позицией отключения цилиндров от контроллера транспортного средства;
Первый модуль регулировки, предназначенный для регулировки скорости вращения двигателя в соответствии с диапазоном скорости вращения, в котором находится скорость вращения двигателя, до достижения заданной скорости вращения;
Второй модуль регулировки предназначен для синхронизации текущего сигнала положения двигателя, соответствующего сигналу преобразователя двигателя, с установленной скоростью вращения двигателя. Это позволяет отрегулировать положение преобразователя двигателя таким образом, чтобы угол поворота коленчатого вала двигателя оставался в пределах заданного интервала.
В некоторых вариантах осуществления настоящего изобретения, на основе вышеупомянутого технического решения, первый регулируемый модуль также служит для: если скорость вращения двигателя меньше или равны первой заданной скоростью вращения, определяется, превышают ли скорость вращения двигателя второй заданной скорости; если скорость вращения двигателя превышают вторые заданные скорости, регулирования скорости вращения двигателя до уровня вторых заданных скорости вращения; при этом первые заданные скорости превышают вторые заданные скорости. при этом первые заданные скорости превышают вторые заданные скорости вращения.
В некоторых вариантах осуществления настоящего изобретения, на основе вышеупомянутого технического решения, первый модуль регулировки также используется для управления мотором с использованием контроля крутящего момента или контроля скорости для регулировки скорости вращения двигателя до второй заданной скорости вращения.
В некоторых вариантах осуществления настоящего изобретения, на основе вышеупомянутого технического решения, первый регулирующий модуль также используется для регулирования скорости вращения двигателя до первой установленной скорости вращения, если скорость оборота двигателя превышает первую установленную скорость оборота.
В некоторых вариантах осуществления, на основе вышеупомянутого технического решения, первый модуль регулировки также используется для управления крутящим моментом двигателя для регулировки скорости вращения двигателя до первой установленной скорости вращения.
В некоторых вариантах осуществления настоящего изобретения, на основе вышеупомянутого технического решения, второй модуль регулировки также используется для регулирования скорости вращения двигателя до третьей установленной скорости, причем третья установленная скорость вращения меньше, чем вторая установленная скорость вращения.
В некоторых вариантах осуществления, на основе вышеупомянутого технического решения, устройство также оснащено модулью оценки, который используется для определения того, остановилось ли положение угла поворота коленчатого вала двигателя в предустановленном интервале угла поворота коленчатого вала; Если положение угла поворота коленчатого вала двигателя останавливается в пределах заданного интервала угла поворота коленчатого вала, управление положением остановки цилиндра заканчивается.
В некоторых вариантах осуществления настоящего изобретения, на основе вышеупомянутого технического решения, модуль оценки также используется для повторной регулировки положения вращения двигателя, если положение угла поворота коленчатого вала двигателя не останавливается в предустановленном интервале угла поворота коленчатого вала, так что соответствующее положение угла поворота коленчатого вала двигателя останавливается в предустановленном интервале угла поворота коленчатого вала.
В некоторых вариантах осуществления настоящего изобретения, на основе вышеупомянутого технического решения, устройство также включает в себя модуль управления для управления двигателем при следующем запуске в соответствии с первой кривой крутящего момента, если положение угла поворота коленчатого вала двигателя останавливается в пределах предустановленного интервала угла поворота коленчатого вала. Первая кривая крутящего момента является кривой крутящего момента, которая принимает минимальный выходной крутящий момент в качестве начального значения и изменяет выходной крутящий момент в зависимости от угла поворота коленчатого вала.
В некоторых вариантах осуществления настоящего изобретения, на основе вышеупомянутого технического решения. Указанный модуль управления также используется для управления двигателем при следующем запуске в соответствии со второй кривой крутящего момента, если положение коленчатого вала двигателя не находится в предварительно заданном диапазоне углов поворота коленчатого вала, причем вторая кривая крутящего момента представляет собой кривую крутящего момента, при которой крутящий момент изменяется в зависимости от угла поворота коленчатого вала с максимальным выходным крутящим моментом в качестве начального значения.
В некоторых вариантах осуществления настоящего изобретения настоящего изобретения, на основе вышеупомянутого технического решения, модуль управления также используется для запуска двигателя с максимальным пусковым крутящим моментом в случае сбоя синхронизации сигнала положения двигателя в настоящее время.
В некоторых вариантах осуществления настоящего изобретения, на основе вышеупомянутого технического решения, устройство также включает в себя приемный модуль, сконфигурированный для отправки требования к остановке контроллера двигателя через контроллер транспортного средства; После того, как контроллер двигателя получает требование отключения, контроллер двигателя управляет двигателем, чтобы прекратить подачу топлива и зажигание, и отправляет команду завершения отключения цилиндра контроллеру транспортного средства; Прием команды управления положением остановки цилиндра, отправленной контроллером транспортного средства.
Согласно одному из аспектов вариантов осуществления настоящего изобретения, предусмотрена система управления, включающая в себя первый контроллер и второй контроллер, первый контроллер отправляет команду управления положением остановки цилиндра второму контроллеру, и второй контроллер получает скорость вращения двигателя после получения команды управления положением остановки цилиндра; В зависимости от диапазона скорости вращения двигателя , в котором находится указанный двигатель, регулируют его вращения до достижения заданной скорости; Когда скорость вращения двигателя достигает заданной скорости вращения, текущий сигнал положения двигателя синхронизируется, чтобы соответствовать сигналу вращения двигателя, и положение вращения двигателя регулируется так, что положение угла поворота коленчатого вала двигателя останавливается в предустановленном интервале угла поворота коленчатого вала; Где первый контроллер является контроллером транспортного средства, а второй контроллер является контроллером двигателя.
В соответствии с одним аспектом варианта осуществления настоящего изобретения предлагается компьютерно-читаемый носитель, на котором хранится компьютерная программа, которая при выполнении процессором реализует способ управления положением остановки цилиндра двигателя в вышеописанном техническом решении.
Согласно одному аспекту варианта осуществления настоящего изобретения, предусмотрено электронное устройство, включающее в себя: процессор; и память для хранения исполняемых инструкций процессора; где процессор сконфигурирован для выполнения способа управления положением остановки цилиндра двигателя в вышеупомянутом техническом решении путем выполнения исполняемых инструкций.
В соответствии с одним из аспектов вариантов осуществления данного заявления предоставляется компьютерный программный продукт или компьютерная программа, включающая в себя компьютерные инструкции, которые хранятся на компьютерном носителе данных. Процессор компьютерного устройства считывает инструкции с компьютерного носителя данных, и процессор выполняет эти инструкции, чтобы компьютерное устройство выполняет способ управления положением остановки цилиндра двигателя, как в вышеупомянутом техническом решении.
В предложенном варианте осуществления технического решения, при управлении положением остановки цилиндра двигателя сначала получается скорость вращения двигателя, а затем электродвигатель управляется для регулирования скорости вращения двигателя в соответствии с различными скоростями вращения двигателя до тех пор, пока скорость вращения двигателя не будет регулирована до установленной скорости вращения. После установки скорости вращения двигателя до установленной скорости вращения на заданную скорость, синхронизируйте текущий сигнал положения двигателя синхронизируется с сигналом вращения двигателя, а затем отрегулируйте положение вращения двигателя регулируется таким образом, чтобы положение угла поворота коленчатого вала двигателя остановилось в пределах заданного интервала угла поворота коленчатого вала. Таким образом, регулируя положение резольвера электродвигателя, обеспечивается остановка углового положения коленчатого вала двигателя в пределах заранее установленного диапазона угловых положений. Это позволяет обеспечить, чтобы каждое положение остановки цилиндра двигателя располагалось в относительно фиксированном диапазоне значений, что в определенной степени повышает точность остановки положения цилиндра двигателя. Кроме того, путем фиксации углового положения коленчатого вала двигателя в пределах заданного диапазона угловых положений, при следующем запуске двигателя можно использовать относительно однородный пусковой крутящий момент, что обеспечивает стабильность и плавность повторного запуска двигателя.
Следует понимать, что приведенное выше общее описание и последующие подробные описания носят исключительно примерный и пояснительный характер и не ограничивают настоящее изобретение.
Описание фигур графических изображений
Данная фигура включена в описание и составляет его часть, иллюстрирует вариант осуществления, совместимый с настоящим изобретением, и вместе с описанием используется для объяснения принципов настоящего изобретения. Очевидно, что чертежи в нижеприведенном описании являются лишь некоторыми вариантами осуществления настоящего изобретения, и другие чертежи могут быть получены специалистами в области техники без творческого труда на основе этих чертежей.
Фиг. 1 схематически изображает примерную системную архитектуру, где используется техническое решение, изложенное в настоящем изобретении.
Фиг. 2 схематически показывает процесс шагов способа управления положением остановки цилиндра двигателя, предусмотренный вариантом осуществления настоящего изобретения.
Фиг. 3 схематически показывает процесс регулировки скорости вращения двигателя до достижения установленной скорости вращения в соответствии с диапазоном скорости вращения, в котором находится скорость вращения двигателя.
Фиг. 4 схематически показывает процесс шагов способа управления положением остановки цилиндра двигателя, предусмотренный вариантом осуществления настоящего изобретения.
Фиг. 5 схематически показывает процесс шагов стратегии управления положением остановки цилиндра, предусмотренный вариантом осуществления настоящего изобретения.
Фиг. 6 схематически показывает структурную блок-схему устройства управления положением остановки цилиндра двигателя, предусмотренного вариантом осуществления настоящего изобретения.
Фиг. 7 схематически показывает структурную блок-схему компьютерной системы, подходящей для реализации электронного устройства, соответствующего вариантам осуществления настоящего изобретения.
Варианты конкретного выполнения
Теперь примеры вариантов осуществления будут более полно описаны со ссылкой на прилагаемые чертежи. Тем не менее, способы реализации могут быть реализованы в различных формах и не должны рассматриваться как ограничиваемые примерами, изложенными здесь; Вместо этого эти варианты осуществления предоставлены таким образом, чтобы настоящее изобретение было более всеобъемлющей и полной, и идеи примерных вариантов осуществления были полностью доведены до специалистов в данной области.
Кроме того, указанные признаки, структуры или характеристики могут быть объединены любым подходящим образом в одном или нескольких вариантах осуществления. В следующем описании приведено множество конкретных деталей, чтобы обеспечить полное понимание вариантов осуществления настоящего изобретения. Тем не менее, специалисты в этой области поймут, что технические решения настоящего изобретения могут быть реализованы без одной или более конкретных деталей или могут быть использованы другие способы, компоненты, устройства, шаги и т. д. В некоторых случаях известные способы, устройства, реализации или операции не представлены и не описаны подробно с целью избежать подробного описания всех аспектов настоящего изобретения.
Блок-схемы, показанные на чертежах, представляют только функциональные объекты и не обязательно должны соответствовать физически независимым объектам. То есть эти функциональные объекты могут быть реализованы в программной форме, либо в одном или нескольких аппаратных модулях или интегральных схемах, либо в различных сетях и/или процессорных устройствах и/или устройствах микроконтроллеров.
Блок-схема, показанная на чертежах, является лишь примерной иллюстрацией и не обязательно включает в себя все содержание и операции/шаги, и не обязательно выполняется в описанном порядке. Например, некоторые операции/шаги могут быть разделены, а другие операции/шаги могут быть объединены или частично объединены, поэтому фактический порядок выполнения может изменяться в зависимости от конкретной ситуации.
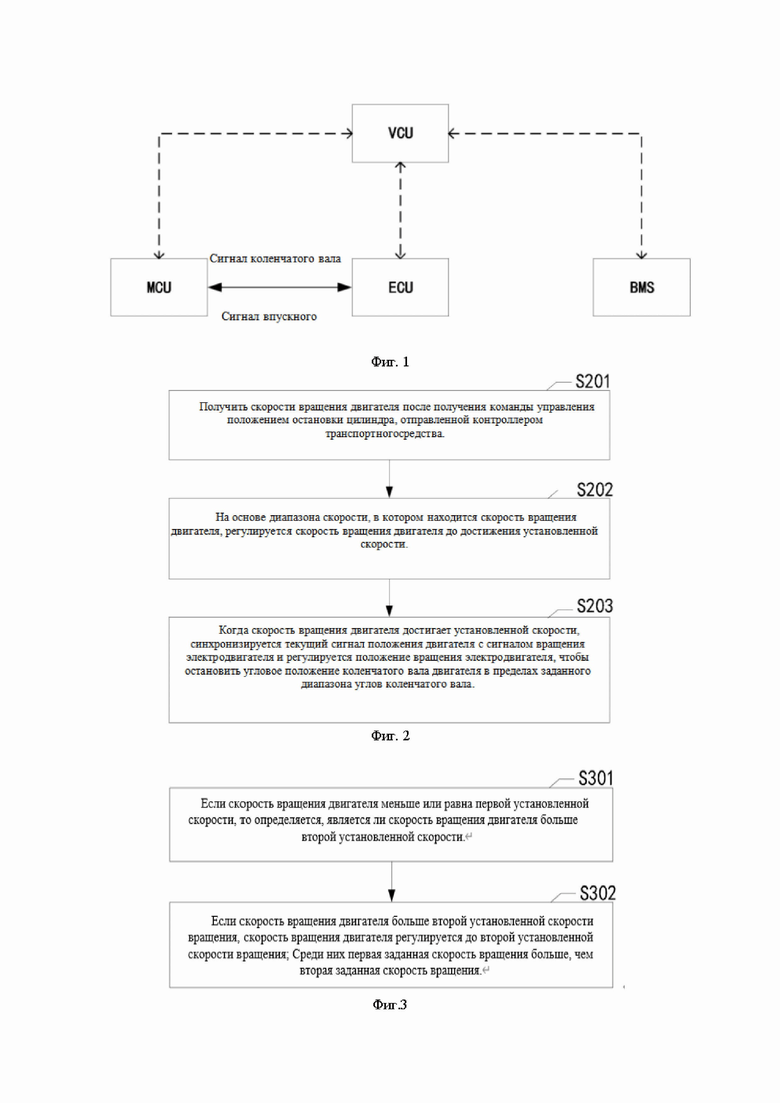
Фиг. 1 схематически изображает примерную системную архитектуру, где используется техническое решение, изложенное в настоящем изобретении
Как показано на фиг. 1, архитектура системы может включать в себя первый контроллер, второй контроллер, третий контроллер и систему управления аккумулятором (BMS), первый контроллер соединен со вторым контроллером, третьим контроллером и системой управления аккумулятором соответственно через провод CAN, а второй контроллер и третий контроллер соединены жесткими проводами.
Конкретный рабочий процесс заключается в том, что первый контроллер рассчитывает различные режимы автомобиля в соответствии с потоком энергии. Когда значение заряда батареи в системе управления батареей изменяется, что требует остановки двигателя, первый контроллер передает запрос на остановку двигателя через CAN-линию третьему контроллеру. После того, как третий контроллер получает требование отключения, двигатель прекращает подачу топлива и зажигание, переходит в режим обратной буксировки и передает команду завершения отключения цилиндра первому контроллеру после успешного отключения. После получения команды завершения остановки цилиндра от третьего контроллера первый контроллер отправляет команду управления положением остановки цилиндра второму контроллеру через линию CAN, а второй контроллер получает двигатель после получения команды управления положением остановки цилиндра; В зависимости от диапазона скорости вращения двигателя, скорость вращения двигателя регулируется до достижения заданной скорости; Когда скорость вращения двигателя достигает заданной скорости, текущий сигнал положения двигателя синхронизируется, чтобы соответствовать сигналу вращения двигателя, и положение вращения двигателя регулируется так, чтобы положение угла поворота коленчатого вала двигателя останавливается в пределах заданного интервала угла поворота коленчатого вала. Среди них первый контроллер является контроллером транспортного средства (VCU), второй контроллер является контроллером электродвигателя (MCU), а третий контроллер является контроллером двигателя (ECU).
Таким образом, регулируя положение резольвера электродвигателя, обеспечивается остановка углового положения коленчатого вала двигателя в пределах заранее установленного диапазона угловых положений. Это позволяет обеспечить, чтобы каждое положение остановки цилиндра двигателя располагалось в относительно фиксированном диапазоне значений, что в определенной степени повышает точность остановки положения цилиндра двигателя. Кроме того, путем фиксации углового положения коленчатого вала двигателя в пределах заданного диапазона угловых положений, при следующем запуске двигателя можно использовать относительно однородный пусковой крутящий момент, что обеспечивает стабильность и плавность повторного запуска двигателя.
Способ управления положением остановки цилиндра двигателя, устройство, читаемый носитель и система управления, предоставленные настоящем изобретении, подробно описаны ниже в сочетании с конкретными вариантами осуществления.
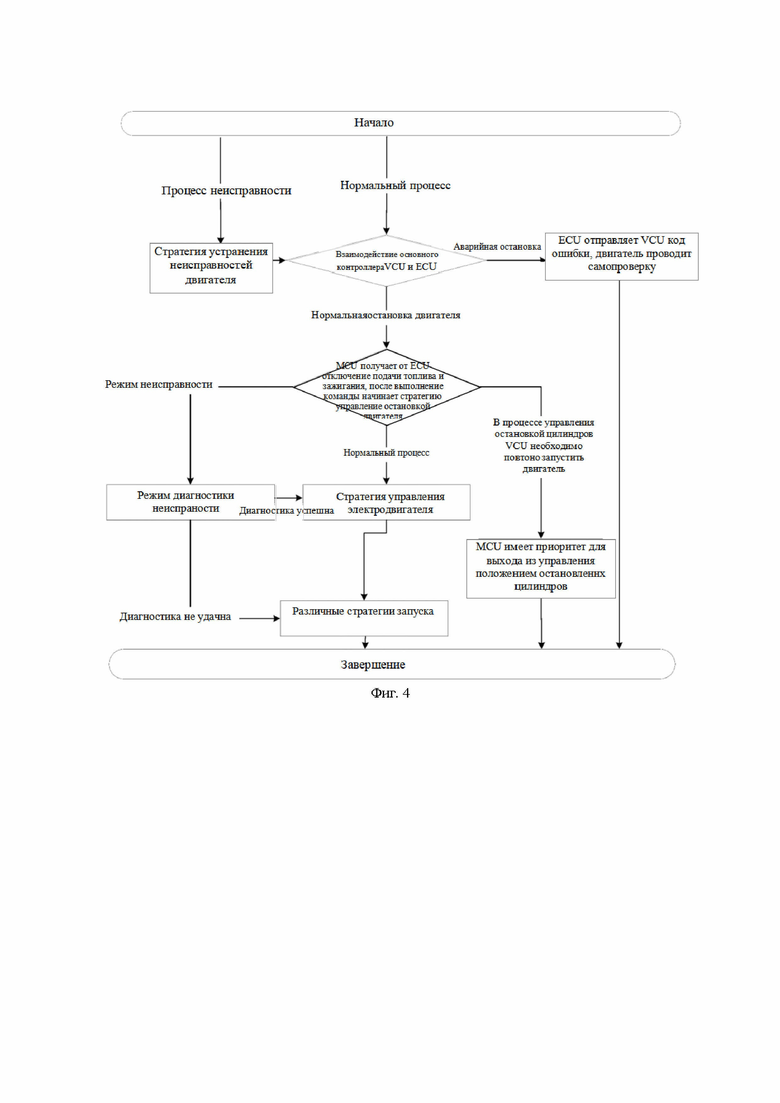
Ссылаясь на фиг. 2, на фиг. 2 схематически показан процесс шагов способа управления положением остановки цилиндра двигателя, предусмотренный вариантом осуществления настоящего изобретения. Основным исполнителем способа управления положением остановки цилиндра двигателя может быть второй контроллер, который в основном может включать следующие шаги S201-S203.
Шаг S201: После получения команды управления положением остановки цилиндра, отправленной контроллером всего транспортного средства, получается скорость вращения двигателя.
Контроллер автомобиля VCU рассчитывает различные режимы автомобиля в соответствии с потоком энергии. При изменении требования к выходному крутящему моменту водителя или срабатывании емкости SOC аккумулятора > SOCmax режим автомобиля должен быть переключен с соответствующего режима с участием двигателя (например, гибридный режим, режим выработки электроэнергии при парковке, режим увеличенного запаса хода и т.д.) в чисто электрический режим, При необходимости остановки двигателя VCU передает через CAN-линию запрос на остановку двигателя (ENGINEstop-request) в блок управления двигателем (ECU).; После получения запроса на остановку цилиндра ECU прекращает подачу топлива и зажигания, переходя в режим реверса. После успешного выполнения операции он отправляет сигнал о завершении остановки цилиндра (ENGINEstop-finished) обратно в VCU. После получения от ECU сигнала о завершении остановки цилиндра (ENGINEstop-finished) VCU передает через CAN-линию запрос на управление положением остановки (MOTORcontrol-request) в контроллер электродвигателя (MCU). После получения сигнала о завершении остановки цилиндра от контроллера двигателя, MCU получает скорость вращения двигателя. Таким образом, получение текущей скорости вращения двигателя способствует последующему контролю скорости двигателя, что, в свою очередь, позволяет реализовать окончательный контроль положения остановки цилиндра
В варианте осуществления, если остановка цилиндра не удалась, через CAN-линию отправляется код ошибки (ENGINEstop-error) в VCU. Двигатель выполняет самодиагностику, и процесс управления положением остановки цилиндра завершен. После устранения неисправности VCU повторно инициирует процесс.
Кроме того, в случае неисправности двигателя, требующего аварийного остановки, после прекращения подачи топлива и зажигания через CAN-линию в VCU отправляются соответствующие коды ошибок и сигнал о завершении остановки цилиндра (ENGINEstop-finished).
Шаг: S202 На основе диапазона скорости, в котором находится скорость вращения двигателя, регулируется скорость вращения двигателя до достижения установленной скорости.
После получения текущей скорости вращения двигателя управляется электродвигателем для регулирования скорости вращения двигателя в соответствии с различными скоростями вращения двигателя до тех пор, пока скорость вращения двигателя не будет регулирована до установленной скорости вращения, чтобы обеспечить быстрый контроль скорости вращения двигателя, а затем контроль положения остановки цилиндра двигателя.
Шаг S203: Когда скорость вращения двигателя достигает установленной скорости, синхронизируется текущий сигнал положения двигателя с сигналом вращения электродвигателя и регулируется положение вращения электродвигателя, чтобы остановить угловое положение коленчатого вала двигателя в пределах заданного диапазона углов коленчатого вала.
Когда скорость двигателя достигает заданной скорости, необходимо синхронизировать текущий сигнал положения двигателя и сигнал вращения электродвигателя. Затем, путем регулирования положения вращения электродвигателя, устанавливается угловое положение коленчатого вала двигателя в пределах заданного диапазона углов Путем регулирования положения вращения электродвигателя, устанавливается угловое положение коленчатого вала двигателя в пределах заданного диапазона углов коленчатого вала (wl, w2), что позволяет каждой остановке цилиндра фиксироваться в относительно постоянном диапазоне положения, что в определенной степени повышает точность позиционирования остановки цилиндра двигателя. Кроме того, Установив угловое положение коленчатого вала двигателя в пределах заданного диапазона углов (wl, w2), обеспечивается минимальный пусковой момент. Так как результирующий момент, действующий на двигатель, становится меньше, запуск двигателя становится более плавным. Таким образом, установка углового положения коленчатого вала двигателя в пределах заданного диапазона углов обеспечивает согласованность и плавность при повторном запуске двигателя.
В предложенном варианте осуществления технического решения, при управлении положением остановки цилиндра двигателя сначала получается скорость вращения двигателя, а затем электродвигатель управляется для регулирования скорости вращения двигателя в соответствии с различными скоростями вращения двигателя до тех пор, пока скорость вращения двигателя не будет регулирована до установленной скорости вращения. После установки скорости вращения двигателя до установленной скорости вращения на заданную скорость, синхронизируйте текущий сигнал положения двигателя синхронизируется с сигналом вращения двигателя, а затем отрегулируйте положение вращения двигателя регулируется таким образом, чтобы положение угла поворота коленчатого вала двигателя остановилось в пределах заданного интервала угла поворота коленчатого вала. Таким образом, регулируя положение резольвера электродвигателя, обеспечивается остановка углового положения коленчатого вала двигателя в пределах заранее установленного диапазона угловых положений. Это позволяет обеспечить, чтобы каждое положение остановки цилиндра двигателя располагалось в относительно фиксированном диапазоне значений, что в определенной степени повышает точность остановки положения цилиндра двигателя. Кроме того, путем фиксации углового положения коленчатого вала двигателя в пределах заданного диапазона угловых положений, при следующем запуске двигателя можно использовать относительно однородный пусковой крутящий момент, что обеспечивает стабильность и плавность повторного запуска двигателя.
В одном из вариантов реализации настоящего изобретения, ссылаясь на фиг. 3, фиг. 3 схематически иллюстрирует процесс регулировки скорости вращения двигателя в зависимости от диапазона скорости, в котором находится скорость вращения двигателя, до достижения установленной скорости. В соответствии с диапазоном скорости, в котором находится скорость двигателя, скорость двигателя регулируется до достижения заданной скорости, которая может в основном включать следующие шаги.
Шаг S301: Если скорость вращения двигателя меньше или равна первой установленной скорости, то определяется, является ли скорость вращения двигателя больше второй установленной скорости.
После получения текущей скорости вращения двигателя, определяется, в какой диапазон скоростей входит текущая скорость двигателя. В зависимости от того, в каком диапазоне скоростей находится двигатель, его скорость регулируется соответствующим образом. При этом первое заданное скорости вращения обозначает пороговое значение скорости, при котором двигатель переходит в режим управления остановом цилиндра при высокой скорости. Для этого первого заданного скорости вращения соответствует состояние предварительной остановки двигателя.
Шаг S302: Если скорость вращения двигателя больше второй установленной скорости вращения, скорость вращения двигателя регулируется до второй установленной скорости вращения; Среди них первая заданная скорость вращения больше, чем вторая заданная скорость вращения.
Если скорость двигателя находится между первым заданным скоростью вращения и вторым заданным скорости вращения, то скорость двигателя регулируется до второго заданного скорости вращения для быстрого снижения скорости.
Таким образом, когда скорость вращения двигателя находится в диапазоне первой заданной скорости вращения и второй заданной скорости вращения, скорость вращения двигателя регулируется на вторую заданную скорость вращения, так что скорость вращения может быть быстро уменьшена.
В одном варианте осуществления настоящего изобретения регулировка скорости вращения двигателя до второй установленной скорости вращения включает в себя:
С помощью управления моментом или скоростью контроллера двигателя регулирует скорость двигателя до второго заданного скорости вращения.
Чтобы быстро регулировать скорость вращения двигателя на вторую установленную скорость вращения, скорость вращения двигателя может быть регулирована на вторую установленную скорость вращения путем управления электродвигателем с использованием управления крутящим моментом или управления скоростью вращения. Конечно, также можно использовать другие способы для регулировки скорости двигателя до второго заданного скорости вращения, при этом не будет ограничений. Таким образом, достигается быстрая регулировка скорости вращения.
В одном варианте осуществления настоящего изобретения скорость вращения двигателя регулируется до достижения установленной скорости вращения в соответствии с диапазоном скорости вращения, в котором находится скорость вращения двигателя, и также включает в себя:
Если скорость вращения двигателя превышает первую заданную скорость вращения, скорость вращения двигателя регулируется на первую заданную скорость вращения.
Таким образом, когда скорость вращения двигателя превышает первую заданную скорость вращения, чтобы быстро управлять положением остановки цилиндра, скорость вращения двигателя регулируется на первую заданную скорость вращения, чтобы быстро достичь состояния предварительного остановки.
В одном варианте осуществления настоящего изобретения регулировка скорости вращения двигателя до первой установленной скорости вращения включает в себя:
С помощью управления моментом контроллера двигателя регулирует скорость двигателя до первого заданного скорости вращения.
Чтобы быстро регулировать скорость двигателя на первую заданную скорость, двигатель может управляться для регулировки скорости двигателя на первую заданную скорость с помощью управления крутящим моментом. Конечно, можно использовать другие способы регулировки скорости двигателя до первой установленной скорости, которая здесь не ограничивается. Таким образом, достигается быстрая регулировка скорости вращения.
В одном варианте осуществления настоящего изобретения, после синхронизации сигнала положения текущего двигателя, способ включает в себя:
Регулировка скорости вращения двигателя до третьей заданной скорости вращения;
Среди них третья заданная скорость вращения меньше, чем вторая заданная скорость вращения.
После синхронизации текущего сигнала положения двигателя текущая скорость двигателя непосредственно регулируется на третью заданную скорость. Когда скорость вращения двигателя достигает третьей заданной скорости, в это время начинается управление положением остановки цилиндра двигателя, что способствует повышению точности положения остановки цилиндра двигателя.
В одном варианте осуществления настоящего изобретения способ также включает в себя:
Определить, останавливается ли положение угла поворота коленчатого вала двигателя в заданном интервале угла поворота коленчатого вала;
Если положение угла поворота коленчатого вала двигателя останавливается в пределах заданного интервала угла поворота коленчатого вала, управление положением остановки цилиндра заканчивается.
После регулировки положения вращения двигателя таким образом, чтобы положение угла поворота коленвала двигателя остановилось в предустановленном интервале угла поворота, необходимо проверить результат регулировки, то есть проверить положение угла поворота двигателя в предустановленном интервале угла поворота, считается, что путем остановки положения угла поворота двигателя в предустановленном интервале угла поворота двигателя минимизируется, что двигатель может быть запущен немного больше выходного крутящего момента на конце коленвала двигателя, то есть двигатель может быть плавно запущен с меньшим крутящим моментом, чтобы обеспечить последовательность каждого запуска.
В одном варианте осуществления настоящего изобретения способ также включает в себя:
В случае если угловое положение поворота коленчатого вала двигателя не соответствует заданному диапазону, производится корректировка положения вращения электродвигателя таким образом, чтобы угловое положение поворота коленчатого вала двигателя соответствовало заданному диапазону.
Когда положение угла поворота коленчатого вала двигателя не останавливается в заданном интервале угла поворота, положение вращения двигателя отрегулируется до тех пор, пока соответствующее положение угла поворота коленчатого вала двигателя не останавливается в заданном интервале угла поворота. Это обеспечивает остановку положения угла поворота коленчатого вала двигателя в предустановленном интервале угла поворота, чтобы выходный крутящий момент на конце коленчатого вала двигателя был минимальным, таким образом, электродвигатель может использовать немного больше выходного крутящего момента коленчатого вала для запуска двигателя, то есть электродвигатель может использовать меньший крутящий момент для плавного запуска двигателя, и согласованность каждого запуска также гарантирована.
В одном варианте осуществления настоящего изобретения способ включает в себя:
Если положение угла поворота коленчатого вала двигателя находится в заданном интервале, то при следующем запуске двигатель управляется в соответствии с первой кривой крутящего момента. Первая кривая крутящего момента представляет собой зависимость выходного крутящего момента от угла поворота коленчатого вала, при этом начальный момент равен минимальному значению.
Когда положение угла поворота коленчатого вала двигателя останавливается в предустановленном интервале угла поворота коленчатого вала, контроллер электродвигателя посылает сигнал успеха на контроллер автомобиля, MOTORcontrol-finished указывает на успешное управление положением предыдущей остановки цилиндра, тогда при следующем запуске двигателя управляется двигатель по первой кривой крутящего момента, которая принимает минимальный выходный крутящий момент в качестве начального значения и изменяет выходной крутящий момент в зависимости от угла поворота коленчатого вала.
Таким образом, если положение угла поворота коленчатого вала двигателя останавливается в пределах заданного интервала угла поворота коленчатого вала, то при следующем запуске двигателя двигатель может плавно запускаться с меньшим крутящим моментом, что обеспечивает плавный переход в процессе остановки и запуска двигателя и обеспечивает плавность процесса запуска и остановки.
В одном варианте осуществления настоящего изобретения способ включает в себя:
Если положение угла поворота коленчатого вала двигателя не останавливается в заданном интервале угла поворота коленчатого вала, то при следующем запуске управляется двигателем для запуска в соответствии со второй кривой крутящего момента, которая является кривой крутящего момента, исходным значением которой является максимальный выходной крутящий момент, изменяющийся в зависимости от угла поворота коленчатого вала.
Когда положение угла поворота коленчатого вала двигателя не останавливается в пределах заданного интервала угла поворота коленчатого вала, контроллер электродвигателя отправляет код ошибки на контроллер автомобиля, MOTORcontrol-errorr указывает на ошибку в управлении положением предыдущего остановки цилиндра, тогда при следующем запуске двигателя управляется двигателем по второй кривой крутящего момента, которая является кривой крутящего момента, изменяющейся в зависимости от угла поворота коленчатого вала с максимальным выходным крутящим моментом в качестве начального значения.
Таким образом, если положение угла поворота коленчатого вала двигателя не останавливается в предустановленном интервале угла поворота коленчатого вала, при следующем запуске двигателя необходимо запустить двигатель с большим крутящим моментом, чтобы двигатель мог нормально запускаться.
В одном варианте осуществления настоящего изобретения способ также включает в себя:
Если синхронизация текущего сигнала позиции двигателя не удалась, то будет использован максимальный стартовый момент для запуска двигателя
В одном варианте осуществления настоящего изобретения, перед получением скорости вращения двигателя, необходимо выполнить следующие:
Отправка требования к остановке на контроллер двигателя через контроллер всего транспортного средства;
После того, как контроллер двигателя получает требование отключения, контроллер двигателя управляет двигателем, чтобы прекратить подачу топлива и зажигание, и отправляет команду завершения отключения цилиндра контроллеру транспортного средства;
Получить команду управления положением остановки цилиндра, отправленную контроллером транспортного средства.
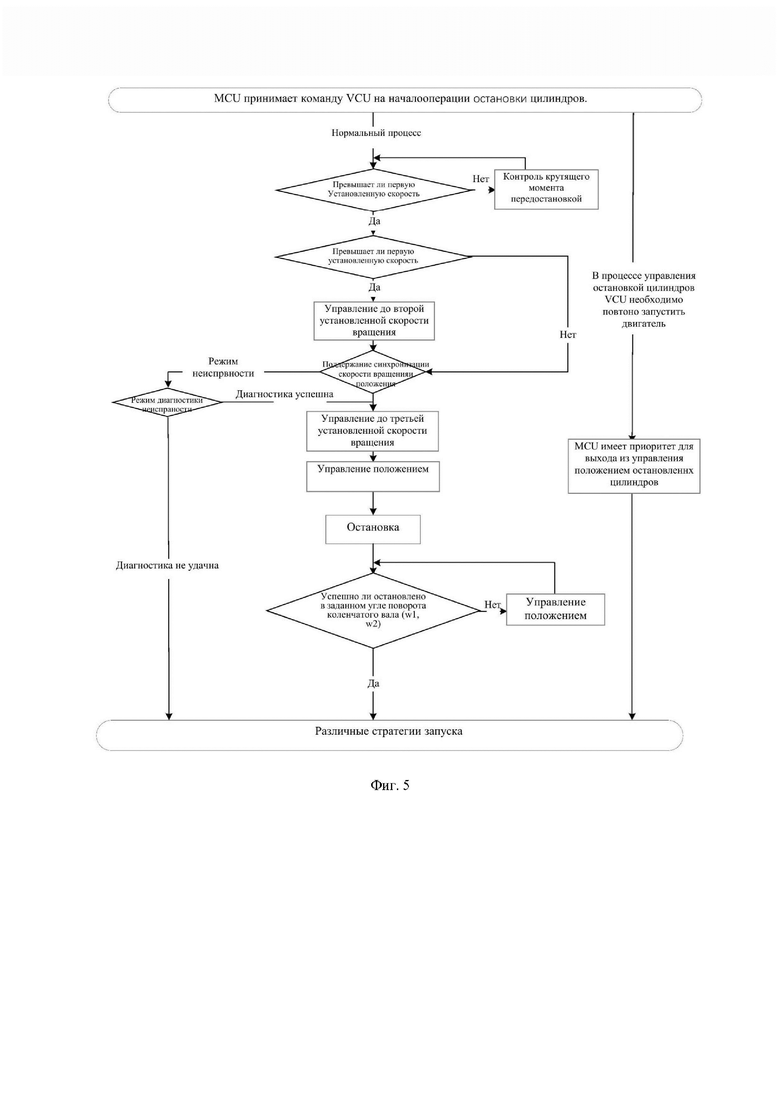
Чтобы облегчить понимание технического решения настоящего изобретения в целом, см. фиг. 4, где схематически показан процесс шагов способа управления положением остановки цилиндра двигателя, предусмотренный вариантом осуществления настоящего изобретения. Способ управления положением остановки цилиндра двигателя может в основном включать в себя следующие шаги.
Управлять взаимодействием между контроллером автомобиля и контроллером двигателя для обеспечения нормальной остановки двигателя.
Конкретно, контроллер автомобиля (VCU) вычисляет разные режимы работы автомобиля на основе потока энергии. Когда водитель изменяет требования к крутящему моменту или когда уровень заряда батареи (SOC) превышает максимальную емкость (SOCmax), режим работы автомобиля должен переключиться с режимов, связанных с участием двигателя (таких как гибридный режим, режим парковочной генерации, режим увеличенного пробега и т. д.), на чисто электрический режим. В этом случае возникает необходимость остановки двигателя; в этот момент VCU отправляет сигнал о необходимости остановки двигателя (ENGINEstop-request) в контроллер двигателя (ECU) по каналу CAN. После того, как ЭБУ получает требование об остановке цилиндра, двигатель прекращает подачу топлива и зажигание и переходит в режим торможения двигателем
Если двигатель останавливается нормально, MCU контроллера двигателя принимает команду завершения остановки цилиндра, отправленную ЭБУ контроллера двигателя, и вводит стратегию управления положением остановки цилиндра.
В частности, если ЭБУ получает требование остановки цилиндра и успешно остановит цилиндр, команда завершения остановки цилиндра ENGINEstop-finished передается на VCU. После получения от ECU команды о завершении остановки цилиндра (ENGINEstop-finished) VCU передает через CAN-линию контроллеру двигателя (MCU) команду управления положением остановки цилиндра (MOTORcontrol-request)
Управление положением остановки цилиндра осуществляется контроллером двигателя.
В частности, MCU осуществляет синхронизацию сигнала позиции двигателя, который поступает от ECU по кабелю (включая сигнал коленчатого вала и сигнал впускного кулачкового вала), с сигналом вращения электродвигателя. Затем MCU управляет позицией электродвигателя по замкнутому контуру, чтобы двигатель остановился в заданном диапазоне углов кривошипа (wl, w2). В случае успешного выполнения этой операции MCU отправляет сигнал обратной связи об успешном завершении MOTORcontrol-finished по CAN-линии в VCU.
В случае, если синхронизация сигнала положения двигателя не удалась, происходит переход в режим диагностики синхронизации сигнала. Если диагностика успешна, двигатель останавливается в диапазоне углов кривошипа (wl, w2) и отправляет сигнал успешного завершения MOTORcontrol-finished в VCU. В случае неудачи диагностики синхронизации сигнала, отправляется код ошибки MOTORcontrol-errorr в VCU.
Если процесс управления остановкой цилиндра требует перезапуска двигателя, выйдите из управления положением остановки цилиндра.
В процессе управления остановкой цилиндров, если VCU отправляет сигнал о перезапуске двигателя, стратегия управления положением остановленного цилиндра завершается. MCU отправляет сигнал MOTORstart=0, а VCU использует моментную кривую, которая изменяется в зависимости от угла коленчатого вала. Начальное значение этой кривой равно максимальному значению Tstart max.
Следующая стратегия запуска двигателя определяется в зависимости от положения остановки цилиндра.
В частности, VCU получает MOTORcontrol-finished, указывающий на успешное управление положением остановки цилиндра в предыдущий раз, при следующем запуске двигателя отправляет MCU MOTORstart=l, обычно используя кривый запуска крутящего момента в зависимости от угла поворота коленчатого вала с начальным значением (Tstart) min.
VCU получает MOTORcontrol-error, указывающий на ошибку в управлении положением предыдущего остановки цилиндра, при следующем запуске двигателя отправляет MCU MOTORstart=0, что соответствует кривой запуска крутящего момента с изменением угла поворота коленчатого вала с начальным значением (Tstart)max
Если двигатель останавливается ненормально, контроллер двигателя отправляет код ошибки контроллеру двигателя.
В частности, в случае неудачи остановки цилиндра двигателя по линии CAN отправляется код ошибки ENGINEstop-error в VCU, двигатель проводит самопроверку, процесс управления положением остановки цилиндра прекращается, после устранения неисправности VCU возобновляет процесс.
Кроме того, если двигатель выходит из строя и требуется экстренная остановка, после прекращения подачи топлива и зажигания он отправляет через CAN-линию VCU соответствующий код ошибки и команду о завершении остановки цилиндра (ENGINE Estop-finished).
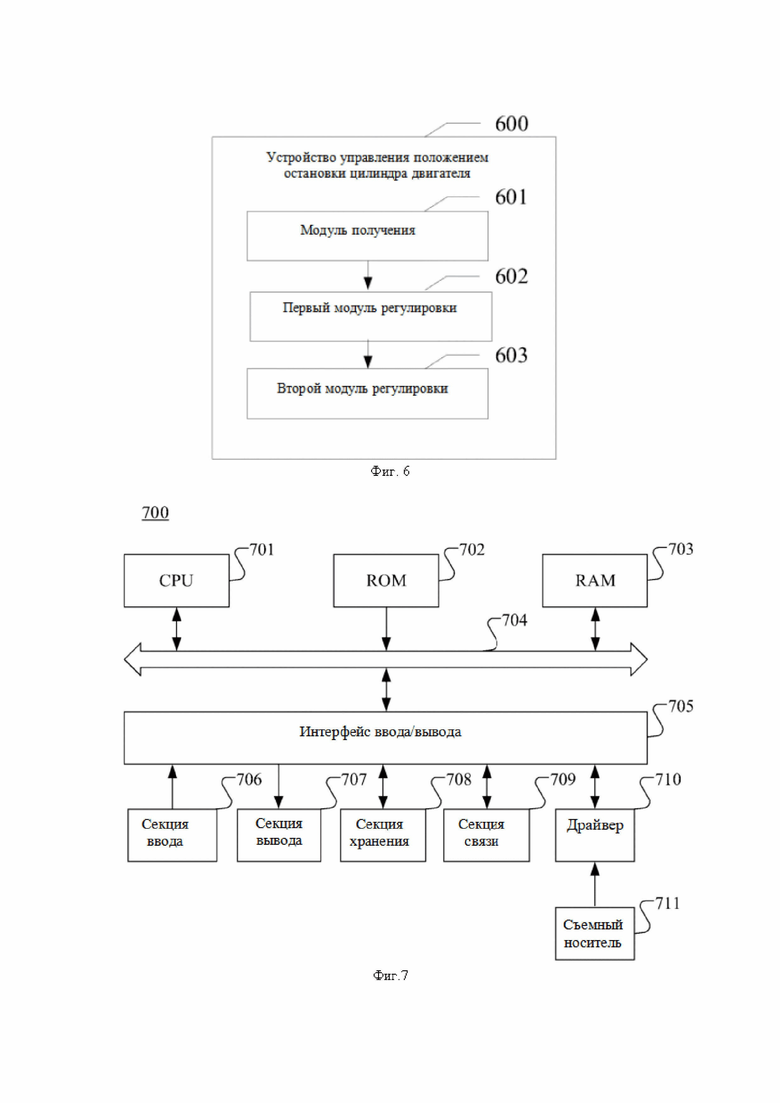
Что касается стратегии управления положением остановки цилиндра, то, в частности, см. фиг. 5, на которой схематично показан процесс шагов стратегии управления положением остановки цилиндра, предусмотренный вариантом осуществления настоящего изобретения.
После получения команды завершения отключения цилиндра, отправленной контроллером двигателя, контроллер двигателя переходит в режим работы отключения цилиндра.
Получить скорость вращения двигателя и определить, выше ли скорость вращения двигателя первой заданной скоростью вращения;
Если скорость вращения двигателя выше первой заданной скорости вращения, управление крутящим моментом регулирует скорость вращения двигателя до первой заданной скорости вращения;
Если скорость вращения двигателя не превышает первую заданную скорость вращения, то следует отрегулировать скорость вращения двигателя на вторую заданную скорость вращения;
Синхронизировать текущий сигнал положения двигателя, чтобы он соответствовал сигналу поворота электродвигателя
Скорость двигателя регулируется до третьей заданной скорости, положение вращения электродвигателя корректируется, после чего осуществляется остановка
После остановки определить, остановился ли двигатель в предустановленном интервале угла поворота коленчатого вала;
Если да, то завершить данное управление остановкой цилиндра;
Если нет, то заново запустить генератор для управления положением.
Во время управления остановкой цилиндра, если VCU отправляет флаг повторного запуска двигателя, стратегия управления положением остановки цилиндра выходит, MCU отправляет MOTO Rstart=0, VCU соответствует кривой крутящего момента, изменяющейся в зависимости от угла поворота коленчатого вала с начальным значением (Tstart)max.
Следует отметить, что, различные шаги способа в настоящем изобретении , описанные в определенном порядке на чертежах не является обязательными и не подразумевают, что все шаги должны быть выполнены в указанном порядке для достижения желаемого результата. Дополнительные или альтернативные шаги, которые могут включать в себя опускание некоторых шагов, объединение нескольких шагов в один шаг, а также/или разделение одного шага на несколько шагов и т.д.
Варианты осуществления устройства настоящего изобретения описаны ниже, которые могут быть использованы для выполнения способа управления положением остановки цилиндра двигателя в вышеупомянутом варианте осуществления настоящего изобретения. Фиг. 6 схематически показывает структурную блок-схему устройства управления положением остановки цилиндра двигателя, предусмотренного вариантом осуществления настоящего изобретения. Как показано на фиг. 6, устройство 600 управления положением остановки цилиндра двигателя включает в себя:
Модуль получения 601, предназначенный для получения скорости вращения двигателя после получения команды управления позицией отключения цилиндров от контроллера транспортного средства; первый модуль 602 регулировки, предназначенный для регулировки скорости вращения двигателя до достижения заданных скорости вращения в зависимости от диапазона скорости вращения, в котором находятся скорости вращения двигателя.
Второй модуль 603 регулировки используется для синхронизации текущего сигнала положения двигателя в соответствии с сигналом вращения двигателя, когда скорость вращения двигателя достигает установленной скорости вращения, и регулировки положения вращения двигателя так, что положение угла вращения коленчатого вала двигателя останавливается в пределах предустановленного интервала угла вращения коленчатого вала.
В некоторых вариантах осуществления настоящего изобретения, основанном на вышеуказанном техническом решении, первый модуль 602 также предназначен для того, что если скорость вращения двигателя меньше или равна первой установленной частоте вращения, то осуществляется проверка, является ли скорость вращения двигателя больше второй заданной частоты вращения; если скорость вращения двигателя больше второй заданной частоты вращения, то скорость вращения двигателя регулируется до второй заданной частоты вращения; при этом первая установленная скорость вращения больше второй заданной частоты вращения.
В некоторых вариантах осуществления настоящего изобретения, основанном на вышеупомянутом техническом решении, первый модуль 602 регулировки также используется для управления электродвигателем для регулировки скорости вращения двигателя на вторую заданную скорость вращения с использованием управления крутящим моментом или управления скоростью вращения.
В некоторых вариантах осуществления настоящего изобретения, основанных на вышеописанном техническом решении, первый модуль 602 регулировки также используется для регулирования скорости вращения двигателя до первой заданной скорости вращения, если скорость вращения двигателя превышает первую заданную скорость вращения.
В некоторых вариантах осуществления настоящего изобретения, основанном на вышеупомянутом техническом решении, первый модуль 602 регулировки также используется для управления электродвигателем для регулировки скорости вращения двигателя до первой заданной скорости вращения с использованием управления крутящим моментом.
В некоторых вариантах осуществления настоящего изобретения, на основе вышеупомянутого технического решения, второй модуль 603 регулирования дополнительно используется для регулирования скорости вращения двигателя до третьей заданной скорости вращения; Среди них третья заданная скорость вращения меньше, чем вторая заданная скорость вращения.
В некоторых вариантах осуществления настоящего изобретения, на основе вышеупомянутого технического решения, устройство также включает в себя модуль оценки, который используется для определения того, остановилось ли положение угла поворота коленчатого вала двигателя в предустановленном интервале угла поворота коленчатого вала; Если положение угла поворота коленчатого вала двигателя останавливается в пределах предустановленного интервала угла поворота коленчатого вала, Bei U заканчивает управление положением остановки цилиндра.
В некоторых вариантах осуществления, на основе вышеупомянутого технического решения, модуль оценки также используется для повторной регулировки положения вращения двигателя, если положение угла поворота коленчатого вала двигателя не останавливается в предустановленном интервале угла поворота коленчатого вала, так что положение угла поворота коленчатого вала соответствующего двигателя останавливается в предустановленном интервале угла поворота коленчатого вала.
В некоторых вариантах осуществления настоящего изобретения, на основе вышеупомянутого технического решения. Устройство также оснащено модулем управления, предназначенным для управления двигателем с целью запуска в соответствии с первой кривой крутящего момента при следующем запуске. Если положение угла поворота коленчатого вала двигателя находится в пределах предварительно установленного интервала угла поворота коленчатого вала, то первая кривая крутящего момента представляет собой кривую, при которой выходной крутящий момент изменяется в зависимости от угла поворота коленчатого вала.
В некоторых вариантах осуществления настоящего изобретения, на основе вышеупомянутого технического решения,, модуль управления также используется для управления двигателем для запуска в соответствии со второй кривой крутящего момента при следующем запуске, если положение угла поворота коленчатого вала двигателя не останавливается в пределах предустановленного интервала угла поворота коленчатого вала, и вторая кривая крутящего момента является кривой крутящего момента изменяется с максимальным выходным крутящим моментом в качестве начального значения.
В некоторых вариантах осуществления настоящего изобретения, на основе вышеупомянутого технического решения модуль управления также сконфигурирован для включения максимального пускового крутящего момента для запуска двигателя, если синхронизация сигнала положения текущего двигателя не удается синхронизировать.
В некоторых вариантах осуществления настоящего изобретения, на основе вышеупомянутого технического решения, устройство также оснащено приемным модулем, используемым для отправки требования к остановке контроллера двигателя через контроллер транспортного средства; После того, как контроллер двигателя получает требование отключения, контроллер двигателя управляет двигателем, чтобы прекратить подачу топлива и зажигание, и отправляет команду завершения отключения цилиндра контроллеру транспортного средства; Получить команду управления положением остановки цилиндра, отправленную контроллером транспортного средства.
Конкретные детали устройства управления положением остановки цилиндра двигателя, предоставленного в каждом варианте осуществления настоящего изобретения настоящей заявки, были подробно описаны в соответствующих вариантах осуществления способа и здесь не будут повторяться.
На фиг. 7 схематически показана структурная блок-схема компьютерной системы для реализации электронного устройства в соответствии с вариантом осуществления настоящего изобретения.
Следует отметить, что компьютерная система 700 электронного устройства, изображенная на Фиг. 7, представляет собой лишь пример и не должна накладывать никаких ограничений на функции и область применения вариантов осуществления данной заявки.
Как показано на фиг. 7, компьютерная система 700 включает в себя центральный процессорный блок 701 (Central Processing Unit, CPU), который может выполнять различные соответствующие действия и процессы в соответствии с программой, сохраненной в памяти 702 только для чтения (Read-Only Memory, ROM), или программой, загруженной из секции 708 хранения в память 703 с произвольным доступом (Random Access Memory, RAM). В памяти 703 с произвольным доступом также хранятся различные программы и данные, необходимые для работы системы. Центральный процессор 701, постоянная память 702 и память 703 с произвольным доступом соединены друг с другом через шину 704. Интерфейс 705 ввода/вывода (интерфейс ввода/вывода, то есть интерфейс ввода/вывода) также подключен к шине 704.
К интерфейсу 705 ввода/вывода подключены следующие компоненты: секция 706 ввода, включающая клавиатуру, мышь и тому подобное; включает в себя секцию 707 выхода, такую как катодно-лучевая трубка (Cathode Ray Tube, CRT), жидкокристаллический дисплей (Liquid Crystal Display, LCD) и тому подобное, а также динамики и тому подобное; Секция 708 хранения, включающая жесткий диск и тому подобное; И секция 709 связи, включающая в себя карту сетевого интерфейса, такую как карта локальной сети, модем и тому подобное. Секция 709 связи выполняет обработку связи через сеть, такую как Интернет. Драйвер 710 также подключен к интерфейсу 705 ввода/вывода по мере необходимости. Съемный носитель 711, такой как магнитный диск, оптический диск, магнитооптический диск, полупроводниковая память и тому подобное, устанавливается на драйвер710 по мере необходимости, так что компьютерная программа, считываемая с него, устанавливается в секцию 708 хранения по мере необходимости.
В частности, в соответствии с вариантами осуществления настоящего изобретения процессы, описанные в различных блок-схемах способа, могут быть реализованы в виде программ компьютерного программного обеспечения. Например, варианты осуществления настоящего изобретения включают в себя компьютерный программный продукт, включающий в себя компьютерную программу, размещенную на читаемом компьютером носителе, компьютерную программу, содержащую программный код для выполнения способа, показанного в блок-схеме. В таких вариантах осуществления компьютерная программа может быть загружена и установлена из сети через секцию 709 связи и/или установлена со съемного носителя 711. Когда компьютерная программа выполняется центральным процессором 701, она выполняет различные функции, определенные в системе настоящего изобретения.
Следует отметить, что компьютерно-читаемый носитель, представленный в вариантах осуществления настоящего изобретения, может быть как компьютерно-читаемым сигнальным носителем, так и компьютерно-читаемым носителем данных, либо представлять собой комбинацию обоих типов носителей. Например, компьютерно-читаемый носитель данных может представлять собой электрическую, магнитную, оптическую, электромагнитную, инфракрасную или полупроводниковую систему, устройство или приспособление, а также любую их комбинацию. Более конкретные примеры читаемых компьютером носителей информации могут включать, но не ограничиваются ими: электрическое соединение с одним или несколькими проводами, диск портативного компьютера, жесткий диск, память с произвольным доступом (RAM), память только чтения (ROM), стираемая программируемая память только чтения (Erasable Programmable Read Only Memory, EPROM ) , флэш-память, оптическое волокно, портативная компактная магнитная память только для чтения (Compact Disc Read-Only Memory, CD-ROM), оптическое устройство памяти, магнитное устройство памяти или любая подходящая комбинация вышеперечисленных. В настоящем изобретении компьютерно-читаемый носитель данных может быть любым материальным носителем, содержащим или хранившим программу, которая может использоваться системой, устройством или устройством выполнения инструкций или использоваться в сочетании с ней. В настоящем изобретении компьютерно-читаемый сигнальный носитель может включать в себя сигнал данных, распространяемый в основной полосе частоты или как часть несущей, где несет компьютерно-читаемый программный код. Такие распространяемые сигналы данных могут принимать различные формы, включая, но не ограничиваясь ими, электромагнитные сигналы, оптические сигналы или любую подходящую комбинацию вышеперечисленных. Компьютерно-читаемый сигнальный носитель также может быть любым компьютерно-читаемым носителем, отличным от компьютерного читаемого запоминающего носителя, который может отправлять, распространять или передавать программу для использования системой, устройством или прибором выполнения инструкций, или в сочетании с ними. Программный код, сохраненный на носителе, доступном для считывания компьютером, может быть передан с использованием различных типов носителей, таких как беспроводные, проводные и их комбинации.
Блок-схемы и блок-схемы последовательности на чертежах иллюстрируют архитектуру, функции и операции возможных реализаций систем, способов и компьютерных программных продуктов в соответствии с различными вариантами осуществления настоящего изобретения. В связи с этим каждый блок в блок-схеме или блок-схеме последовательности может представлять модуль, программный сегмент или часть кода, содержащий одну или несколько исполняемых инструкций для реализации указанной логической функции. Следует также отметить, что в некоторых альтернативных реализациях функции, указанные в блоках, также могут выполняться в порядке, отличном от того, что указано на чертежах. Например, два блока, представленные один за другим, могут фактически выполняться в основном параллельно, а иногда они могут выполняться в обратном порядке, в зависимости от соответствующей функции. Следует также отметить, что каждый блок в блок-схеме или блок-схеме последовательности, а также комбинации блоков в блок-схеме или блок-схеме последовательности могут быть реализованы специальной аппаратной системой, выполняющей указанные функции или операции, или могут быть реализованы в комбинации специального аппаратного обеспечения и компьютерных инструкций.
Следует отметить, что, хотя в вышеупомянутом подробном описании упоминается несколько модулей или блоков устройства для выполнения действий, такое разделение не является обязательным. Фактически, в соответствии с вариантами осуществления настоящего изобретения, характеристики и функции двух или более модулей или блоков, описанных выше, могут быть воплощены в одном модуле или блоке. И наоборот, характеристики и функции модуля или блока, описанные выше, могут быть также разделены на множество модулей или блоков для конкретизации.
Из приведенного выше описания вариантов осуществления специалистам в области техники легко понять, что примеры вариантов осуществления, описанные здесь, могут быть реализованы программным обеспечением или могут быть реализованы программным обеспечением в сочетании с необходимым оборудованием. Таким образом, техническое решение в соответствии с вариантом осуществления настоящего изобретения может быть воплощено в форме программного продукта, который может храниться на энергонезависимом носителе данных (который может быть CD-ROM, USB-диск, мобильный жесткий диск и т. д.) или в сети, он может содержать инструкции, которые позволяют вычислительному устройству, такому как персональный компьютер, сервер, сенсорный терминал или сетевое устройство и т. д., выполнять способ, соответствующий варианту реализации данного приложения.
После рассмотрения описания и практики изобретений, раскрытых здесь, специалисты в этой области легко придумают другие варианты осуществления настоящего изобретения настоящей заявки. Настоящее изобретение предназначено для охвата любых вариаций, применений или адаптивных изменений настоящего изобретения, которые соответствуют общим принципам настоящего изобретения и включают в себя общеизвестные или традиционные методики в данной области техники, не раскрытые в настоящем изобретении.
Следует понимать, что данное изобретение не ограничивается точными конструкциями, представленными выше и изображенными на чертежах, и может быть модифицировано и изменено без потери своих основных характеристик. Объем настоящего изобретения ограничен только прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЗАПУСКА ДВИГАТЕЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2015 |
|
RU2701632C2 |
| КОНТРОЛЛЕР ЗАПУСКА И СПОСОБ УПРАВЛЕНИЯ ЗАПУСКОМ | 2019 |
|
RU2707162C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ МЕСТОПОЛОЖЕНИЕМ ТОЧКИ ОТКЛЮЧЕНИЯ ЦИЛИНДРА ДВИГАТЕЛЯ, СЧИТЫВАЕМЫЙ НОСИТЕЛЬ И СИСТЕМА УПРАВЛЕНИЯ | 2023 |
|
RU2840828C2 |
| СПОСОБ АНТИЮЗОВОГО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ, СИСТЕМА, КОНТРОЛЛЕР ДВИГАТЕЛЯ И НОСИТЕЛЬ ДАННЫХ | 2022 |
|
RU2833029C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ЗАПУСКА ДВИГАТЕЛЯ | 2014 |
|
RU2638118C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЗАПУСКОМ ДВИГАТЕЛЯ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2560222C1 |
| СИСТЕМА УПРАВЛЕНИЯ АВТОМОБИЛЕМ И СПОСОБ УПРАВЛЕНИЯ АВТОМОБИЛЕМ | 2012 |
|
RU2575331C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ МОТОРНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2668884C2 |
| СИСТЕМА СИЛОВОЙ ПЕРЕДАЧИ | 2020 |
|
RU2742307C1 |
| СПОСОБ (ВАРИАНТЫ) ДЛЯ УСТРАНЕНИЯ ПОСЛЕДСТВИЙ ТЕЧИ ИНЖЕКТОРА ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2707236C2 |
Изобретение относится к управлению двигателями внутреннего сгорания, а именно к способу, устройству, читаемому носителю и системе управления для контроля положения остановки цилиндра двигателя. Техническим результатом является обеспечение контроля положения остановки цилиндра двигателя для выполнения последующего плавного запуска двигателя. Результат достигается тем, что получают скорость вращения двигателя после получения команды управления положением остановки цилиндра, отправленной контроллером транспортного средства; в соответствии с диапазоном скорости вращения, в котором находится скорость вращения двигателя, скорость вращения двигателя регулируют до достижения установленной частоты вращения; когда скорость вращения двигателя достигает заданной скорости вращения, синхронизируют текущий сигнал положения двигателя с сигналом вращения электродвигателя, регулируют положение вращения электродвигателя, чтобы установить угол поворота коленчатого вала двигателя в пределах заданного интервала угла поворота коленчатого вала. 4 н. и 11 з.п. ф-лы, 7 ил.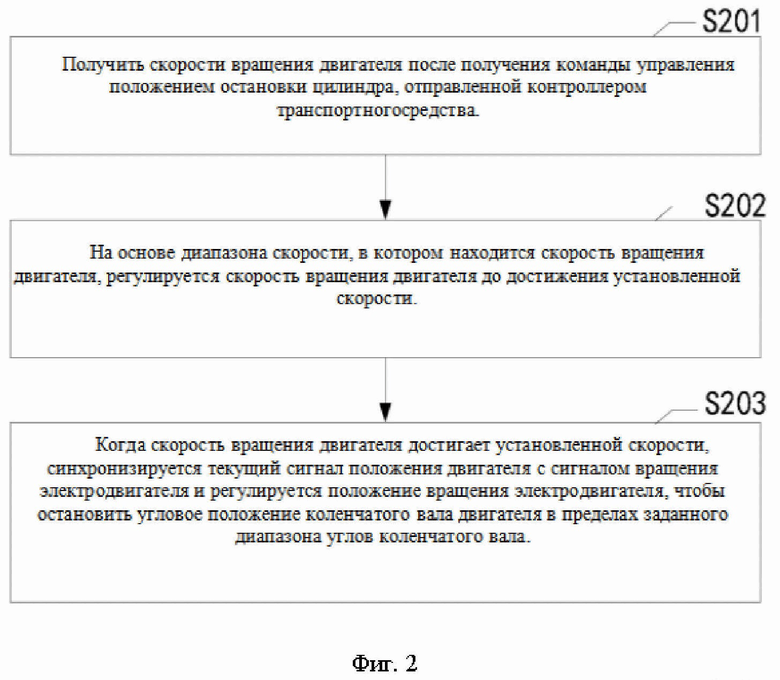
1. Способ управления положением остановки цилиндра двигателя, отличающийся тем, что способ включает в себя:
после получения команды управления положением остановки цилиндра, отправленной контроллером транспортного средства, получают скорость вращения двигателя;
в зависимости от диапазона скорости вращения двигателя, в котором находится указанный двигатель, регулируют его вращение до достижения заданной скорости;
при достижении скорости вращения указанного двигателя заданной скорости синхронизируют текущий сигнал положения двигателя с сигналом резольвера электродвигателя и регулируют позицию резольвера электродвигателя, чтобы угол поворота коленчатого вала двигателя остановился в предустановленном диапазоне углов поворота коленчатого вала.
2. Способ управления положением остановки цилиндра двигателя по п. 1, отличающийся тем, что регулировка скорости вращения двигателя до достижения установленной скорости вращения в соответствии с интервалом скорости вращения, на котором находится скорость вращения двигателя, включает в себя:
если скорость вращения двигателя меньше или равна первой заданной скорости вращения, определяют, больше ли скорость вращения двигателя второй заданной скорости вращения;
если скорости вращения двигателя превышают второе заданное значение скорости, скорости вращения двигателя регулируют до второго заданного значения скорости;
при этом первое заданное значение скорости больше второго заданного значения скорости.
3. Способ управления положением остановки цилиндра двигателя по п. 2, отличающийся тем, что регулировка скорости вращения двигателя до второй заданной скорости вращения включает в себя следующее: управляют мотором с использованием контроля крутящего момента или контроля скорости для регулировки скорости вращения двигателя до второй заданной скорости вращения.
4. Способ управления положением остановки цилиндра двигателя по п. 2, отличающийся тем, что регулировка скорости вращения двигателя до установленной скорости вращения также включает в себя: если скорость вращения двигателя превышает первую заданную скорость вращения, скорость вращения двигателя регулируют до первой заданной скорости вращения.
5. Способ управления положением остановки цилиндра двигателя по п. 4, отличающийся тем, что регулировка скорости вращения двигателя до первой установленной скорости вращения включает в себя: управляющий двигатель регулирует скорость вращения двигателя до первой заданной скорости вращения с использованием управления крутящим моментом.
6. Способ управления положением остановки цилиндра двигателя по п. 2, отличающийся тем, что после синхронизации текущего сигнала положения двигателя способ включает в себя: регулируют скорость вращения двигателя до третьей установленной скорости вращения; при этом третья заданная скорость вращения меньше, чем вторая заданная скорость вращения.
7. Способ управления положением остановки цилиндра двигателя по п. 1, отличающийся тем, что способ также включает в себя: определяют, останавливается ли положение угла поворота коленчатого вала двигателя в предустановленном интервале угла поворота коленчатого вала; если положение угла поворота коленчатого вала двигателя находится в заданном диапазоне углов поворота коленчатого вала, завершают управление позицией остановки цилиндров.
8. Способ управления положением остановки цилиндра двигателя по п. 7, отличающийся тем, что способ также включает в себя: если положение угла поворота коленчатого вала двигателя не останавливается в пределах предустановленного интервала угла поворота коленчатого вала, повторно регулируют положение вращения двигателя так, что соответствующее положение угла поворота коленчатого вала двигателя останавливается в пределах предустановленного интервала угла поворота коленчатого вала.
9. Способ управления положением остановки цилиндра двигателя по п. 1, отличающийся тем, что способ включает в себя: если положение угла поворота коленчатого вала двигателя останавливается в пределах предустановленного интервала угла поворота коленчатого вала, управляют двигателем при следующем запуске в соответствии с первой кривой крутящего момента, которая является кривой крутящего момента с минимальным выходным крутящим моментом в качестве начального значения и изменением выходного крутящего момента в зависимости от угла поворота коленчатого вала.
10. Способ управления положением остановки цилиндра двигателя по п. 9, отличающийся тем, что способ включает в себя: если положение угла поворота коленчатого вала двигателя не останавливается в пределах предустановленного интервала угла поворота коленчатого вала, управляют двигателем при следующем запуске в соответствии со второй кривой крутящего момента, которая является кривой крутящего момента с максимальным выходным крутящим моментом в качестве начального значения и изменением выходного крутящего момента в зависимости от угла поворота коленчатого вала.
11. Способ управления положением остановки цилиндра двигателя по п. 1, отличающийся тем, что способ также включает в себя: если синхронизация текущего сигнала положения указанного двигателя не удалась, включают максимальный пусковой момент для запуска двигателя.
12. Способ управления положением остановки цилиндра двигателя по п. 1, отличающийся тем, что перед получением скорости вращения двигателя этап включает в себя: отправку требования к остановке на контроллер двигателя через контроллер всего транспортного средства; после того как контроллер двигателя получает требование отключения, контроллер двигателя управляет двигателем, чтобы прекратить подачу топлива и зажигание, и отправляет команду завершения отключения цилиндра контроллеру транспортного средства; прием команды управления положением остановки цилиндра, отправленной контроллером транспортного средства.
13. Устройство управления положением остановки цилиндра двигателя, отличающееся тем, что устройство включает в себя: модуль получения, предназначенный для получения скорости вращения двигателя после получения команды управления позицией отключения цилиндров от контроллера транспортного средства; первый модуль регулировки, предназначенный для регулировки скорости вращения двигателя в соответствии с диапазоном скорости вращения, в котором находится скорость вращения двигателя, до достижения заданной скорости вращения; второй модуль регулировки, предназначенный для синхронизации текущего сигнала положения двигателя, соответствующего сигналу преобразователя двигателя, с установленной скоростью вращения двигателя, это позволяет отрегулировать положение преобразователя двигателя таким образом, чтобы угол поворота коленчатого вала двигателя оставался в пределах заданного интервала.
14. Компьютерно-читаемый носитель, отличающийся тем, что на упомянутом компьютерно-читаемом носителе хранится компьютерная программа, которая при выполнении процессором реализует метод контроля позиции остановки цилиндра двигателя, указанный в любом из пп. 1-12.
15. Система управления, отличающаяся тем, что она включает в себя первый контроллер и второй контроллер, где первый контроллер отправляет команду управления положением остановки цилиндра второму контроллеру, а второй контроллер получает скорость вращения двигателя после получения команды управления положением остановки цилиндра; в зависимости от диапазона скорости вращения двигателя, в котором он находится, регулирует скорость вращения двигателя до достижения заданной скорости; когда скорость вращения двигателя достигает заданной скорости, синхронизирует текущий сигнал положения двигателя с сигналом вращения электродвигателя, регулирует вращающееся положение электродвигателя, чтобы установить угол поворота коленчатого вала двигателя в пределах предварительно заданного диапазона углов поворота коленчатого вала; при этом первый контроллер является контроллером транспортного средства, а второй контроллер является контроллером двигателя.
| CN 114194175 A, 2022.03.18 | |||
| US 9421970 B2, 2016.08.23 | |||
| CN 101181897 A, 2008.05.21 | |||
| US 2020355152 A1, 2020.11.12 | |||
| JP 3812195 B2, 2006.08.23 | |||
| ГИБРИДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ ЕГО УПРАВЛЕНИЯ | 2020 |
|
RU2741526C1 |

