Изобретение относится к радиотехнике, а именно к способам создания преднамеренных имитирующих радиопомех навигационной аппаратуре потребителей (НАП) глобальной навигационной спутниковой системы (ГНСС).
Известен способ создания преднамеренных помех [1], заключающийся в том, что принимают истинные навигационные сигналы, передаваемые работоспособными навигационными спутниками (НС) ГНСС, «видимыми» в заданном районе, определяют номера работоспособных НС ГНСС, «видимых» в заданном районе, по принятым сигналам определяют свое местоположение, запоминают принятые истинные навигационные сигналы «видимых» НС, для каждого «видимого» НС формируют ложный навигационный сигнал путем смещения по задержке и доплеровской частоте истинного навигационного сигнала и искажения его навигационного сообщения, формируют имитирующую радиопомеху, представляющую собой суммарный помеховый сигнал в виде совокупности ложных навигационных сигналов всех «видимых» НС, синхронизируют имитирующую радиопомеху с истинными навигационными сигналами «видимых» НС ГНСС, излучают имитирующую радиопомеху в заданном районе, ограниченном окружностью с центром в точке размещения станции помех и радиусом  , с мощностью, превышающей мощность истинных навигационных сигналов, передаваемых навигационными спутниками ГНСС.
, с мощностью, превышающей мощность истинных навигационных сигналов, передаваемых навигационными спутниками ГНСС.
Недостатком известного способа создания преднамеренных имитирующих радиопомех НАП ГНСС, является то, что для помехоустойчивой НАП ГНСС, использующей алгоритм антиспуфинга (АС), основанный на анализе энергетических характеристик принимаемых сигналов и блокировании ложных навигационных сигналов (лнс), уровень которых превышает уровень истинного навигационного сигнала на величину, превышающую значение установленного защитного интервала ΔPAC (далее - помехоустойчивая НАП ГНСС) размер зоны подавления, в пределах которой обеспечивается «навязывание» помехоустойчивой НАП ГНСС ложных навигационных сигналов, сокращается до зоны, ограниченной окружностями с центром в точке расположения станции помех и радиусом , где мощность ложной навигационной помехи (лнп) на входе приемника (прм) НАП ГНСС  равна мощности истинного навигационного сигнала (с) Pc (
равна мощности истинного навигационного сигнала (с) Pc ( , дальняя граница) и радиусом
, дальняя граница) и радиусом  , где мощность ложного навигационного сигнала превышает мощность истинного навигационного сигнала на величину защитного интервала ΔPAC (
, где мощность ложного навигационного сигнала превышает мощность истинного навигационного сигнала на величину защитного интервала ΔPAC ( , ближняя граница) (фиг.1).
, ближняя граница) (фиг.1).
Техническим результатом предлагаемого изобретения является увеличение размера зоны подавления, в пределах которой обеспечивается «навязывание» ложных навигационных сигналов помехоустойчивой НАП ГНСС, использующей алгоритм антиспуфинга, основанный на анализе энергетических характеристик принимаемых сигналов, до размеров всего заданного района.
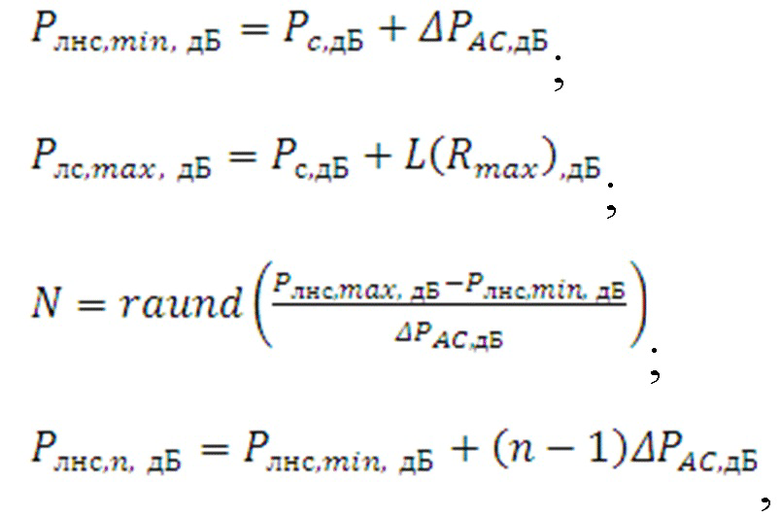
Технический результат достигается тем, что в известном способе для каждого «видимого» НС формируют и излучают N ложных навигационных сигналов, отличающихся друг от друга по задержке и доплеровской частоте (необходимо для раздельного приема ложных навигационных сигналов в НАП ГНСС) и по мощности. При этом значение мощности излученных ложных навигационных сигналов  задается дискретно в интервале от Pлнс,min до Pлнс,max с шагом ΔPAC, соответствующим значению защитного интервала алгоритма антиспуфинга (АС) помехоустойчивой НАП ГНСС
задается дискретно в интервале от Pлнс,min до Pлнс,max с шагом ΔPAC, соответствующим значению защитного интервала алгоритма антиспуфинга (АС) помехоустойчивой НАП ГНСС
где  - мощность истинных навигационных сигналов НС у поверхности Земли (указана в интерфейсном контрольном документе ГНСС); L - функция затухания излученного ложного навигационного сигнала в зависимости от дальности распространения; - расстояние от станции помех до границы заданного района; raund(⋅) - оператор округления до большего целого; n=1, …, N - номер ложного навигационного сигнала; ΔPAC - величина защитного интервала.
- мощность истинных навигационных сигналов НС у поверхности Земли (указана в интерфейсном контрольном документе ГНСС); L - функция затухания излученного ложного навигационного сигнала в зависимости от дальности распространения; - расстояние от станции помех до границы заданного района; raund(⋅) - оператор округления до большего целого; n=1, …, N - номер ложного навигационного сигнала; ΔPAC - величина защитного интервала.
Это обеспечивает увеличение размера зоны подавления, в пределах которой обеспечивается «навязывание» ложных навигационных сигналов помехоустойчивой НАП ГНСС, использующей алгоритм антиспуфинга, основанный на анализе энергетических характеристик принимаемых навигационных сигналов, за счет того, что для каждого n-го ложного навигационного сигнала (лнс,n) формируется n-я парциальная зона подавления (ПЗПn), в пределах которой мощность n-го ложного навигационного сигнала на входе приемника помехоустойчивой НАП ГНСС будет изменяться от  (на дальней ее границе) до
(на дальней ее границе) до  (на ближней ее границе). При этом совокупность всех N парциальных зон подавления для всех N ложных навигационных сигналов перекроют весь заданный район, ограниченный окружностью с центром в точке установки станции помех 3 и радиусом . Таким образом, любой потребитель, оборудованный помехоустойчивой НАП ГНСС и случайным образом расположенный в пределах заданного района, попадет в ту или иную парциальную зону подавления, где мощность соответствующего ложного навигационного сигнала
(на ближней ее границе). При этом совокупность всех N парциальных зон подавления для всех N ложных навигационных сигналов перекроют весь заданный район, ограниченный окружностью с центром в точке установки станции помех 3 и радиусом . Таким образом, любой потребитель, оборудованный помехоустойчивой НАП ГНСС и случайным образом расположенный в пределах заданного района, попадет в ту или иную парциальную зону подавления, где мощность соответствующего ложного навигационного сигнала  на входе приемника помехоустойчивой НАП ГНСС будет превышать мощность истинного навигационного сигнала
на входе приемника помехоустойчивой НАП ГНСС будет превышать мощность истинного навигационного сигнала  на величину, не превышающую величину защитного интервала алгоритма антиспуфинга
на величину, не превышающую величину защитного интервала алгоритма антиспуфинга  .
.
Сущность изобретения поясняется фигурами.
На фиг.1 приведена иллюстрация сокращения зоны подавления помехоустойчивой НАП ГНСС при использовании для подавления известного способа [1].
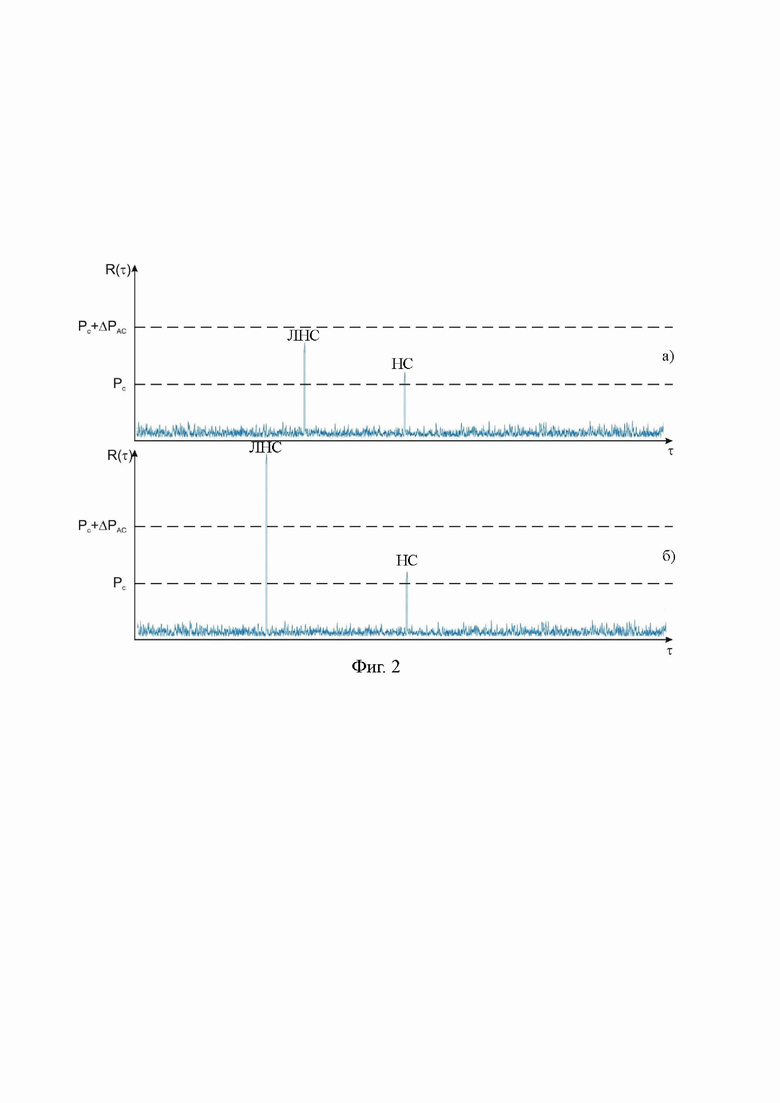
На фиг.2 приведена иллюстрация соотношения уровней навигационного сигнала и имитационной помехи на графике корреляционной функции 
На фиг.3 приведена иллюстрация расширения зоны подавления помехоустойчивой НАП ГНСС до размера всего заданного района при использовании для подавления предложенного способа.
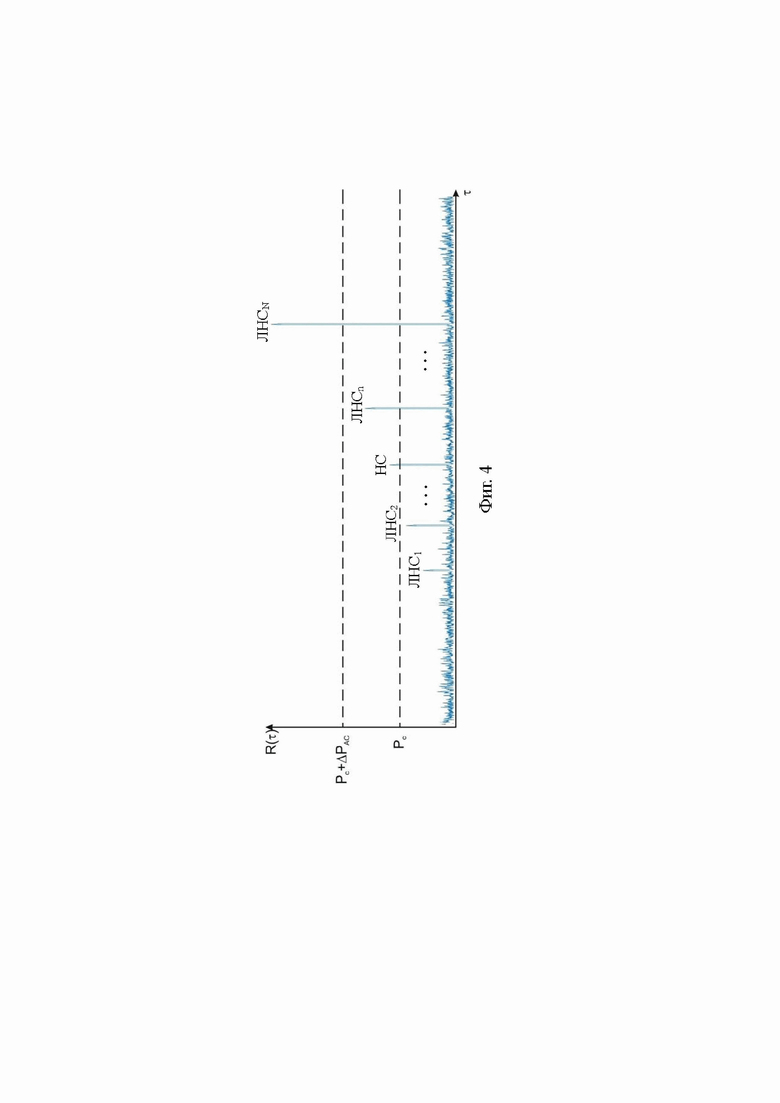
На фиг.4 приведена иллюстрация соотношения уровней навигационного сигнала и совокупности ложных сигналов на графике корреляционной функции
Недостаток известного способа создания преднамеренных помех [1] проиллюстрирован на фиг.1 и фиг.2 и заключается в следующем.
На фиг.1 показан заданный район 1, ограниченный окружностью 2 с центром в точке расположения станции помех 3 и радиусом , где мощность ложного навигационного сигнала на входе приемника НАП ГНСС равна мощности навигационного сигнала  . Зона подавления помехоустойчивой НАП ГНСС 6, формируемая станцией помех 3, излучающей ложный навигационный сигнал в соответствии с известным способом [1], обозначена цифрой 4. Дальняя граница зоны подавления соответствует окружности 2, а ближняя граница зоны подавления, где мощность ложного навигационного сигнала превышает мощность истинного навигационного сигнала на величину защитного интервала
. Зона подавления помехоустойчивой НАП ГНСС 6, формируемая станцией помех 3, излучающей ложный навигационный сигнал в соответствии с известным способом [1], обозначена цифрой 4. Дальняя граница зоны подавления соответствует окружности 2, а ближняя граница зоны подавления, где мощность ложного навигационного сигнала превышает мощность истинного навигационного сигнала на величину защитного интервала  (окружность 5 с центром в точке расположения станции помех 3 и радиусом ). Помехоустойчивая НАП ГНСС 6 расположена в пределах зоны подавления 4, а помехоустойчивая НАП ГНСС 7 расположена в пределах заданного района 1, но вне зоны подавления 4. На фиг.1 показано излучение истинного навигационного сигнала только одного k-го навигационного спутника ГНСС 8 из всех K навигационных спутников, видимых в заданном районе.
(окружность 5 с центром в точке расположения станции помех 3 и радиусом ). Помехоустойчивая НАП ГНСС 6 расположена в пределах зоны подавления 4, а помехоустойчивая НАП ГНСС 7 расположена в пределах заданного района 1, но вне зоны подавления 4. На фиг.1 показано излучение истинного навигационного сигнала только одного k-го навигационного спутника ГНСС 8 из всех K навигационных спутников, видимых в заданном районе.
При использовании для подавления известного способа [1] соотношения уровней навигационного сигнала и имитационной помехи на выходе коррелятора помехоустойчивой НАП ГНСС 6, расположенной в пределах зоны подавления 4, будет таковым, что уровень ложного навигационного сигнала будет превышать уровень истинного навигационного сигнала k-го навигационного спутника ГНСС 8.k на величину, не превышающую величину защитного интервала алгоритма антиспуфинга  (фиг.2а). При этом алгоритм антиспуфинга не блокирует ложный навигационный сигнал, и система вторичной обработки НАП ГНСС 6 берет ложный навигационный сигнал на сопровождение (как имеющую максимальный уровень) с точной оценкой ложных значений ее задержки и доплеровской частоты, которые далее используются для определения координат НАП ГНСС 6. Таким образом ложный навигационный сигнал в этом случае будет «навязан» помехоустойчивой НАП ГНСС 6.
(фиг.2а). При этом алгоритм антиспуфинга не блокирует ложный навигационный сигнал, и система вторичной обработки НАП ГНСС 6 берет ложный навигационный сигнал на сопровождение (как имеющую максимальный уровень) с точной оценкой ложных значений ее задержки и доплеровской частоты, которые далее используются для определения координат НАП ГНСС 6. Таким образом ложный навигационный сигнал в этом случае будет «навязан» помехоустойчивой НАП ГНСС 6.
Соотношения уровней истинного навигационного сигнала и ложного навигационного сигнала на выходе коррелятора помехоустойчивой НАП ГНСС 7, расположенной в пределах заданного района 1, но вне зоны подавления 4, будет таковым, что уровень ложного навигационного сигнала будет превышать уровень истинного навигационного сигнала k-го навигационного спутника ГНСС 8.k на величину, превышающую величину защитного интервала алгоритма антиспуфинга (фиг.2б). При этом алгоритм антиспуфинга блокирует ложный навигационный сигнал, и система вторичной обработки НАП ГНСС 7 берет на сопровождение истинный навигационный сигнал с точной оценкой истинных значений его задержки и доплеровской частоты, которые далее используются для определения координат НАП ГНСС 7. В этом случае ложный навигационный сигнал не будет «навязан» помехоустойчивой НАП ГНСС 7.
Таким образом, для помехоустойчивой НАП ГНСС при реализации известного способа подавления [1] зона подавления сокращается до зоны, ограниченной окружностью 2 и окружностью 5 на фиг.1.
Предложенный способ создания имитирующих радиопомех помехоустойчивой НАП ГНСС заключается в следующем.
На станции помех 3 принимают истинные навигационные сигналы, передаваемые работоспособными навигационными спутниками ГНСС, «видимыми» в заданном районе 1, определяют номера работоспособных НС ГНСС 8.k, «видимых» в заданном районе 1, по принятым сигналам определяют свое местоположение, запоминают принятые истинные навигационные сигналы «видимых» НС ГНСС 8.k, искажают навигационные сообщения истинных навигационных сигналов. На основе истинных навигационных сигналов с искаженными навигационными сообщениями формируют суммарный ложный навигационный сигнал, представляющий сумму ложных навигационных сигналов для каждого k-го «видимого» НС ГНСС 8.k. Суммарный ложный навигационный сигнал синхронизируют с истинными навигационными сигналами видимых навигационных спутников ГНСС 8.k и излучают в пространство в пределах заданного района 1.
Для расширения зоны подавления помехоустойчивой НАП ГНСС в предложенном способе ложные навигационные сигналы для каждого k-го «видимого» НС ГНСС 8.k формируют как сумму N ложных навигационных сигналов, представляющих собой истинный навигационный сигнал соответствующего k-го «видимого» НС ГНСС 8.k с искаженным навигационным сообщением, но отличающихся друг от друга по задержке, доплеровской частоте и мощности. Отличие ложных навигационных сигналов между собой по задержке и доплеровской частоте необходимо для раздельного приема ложных навигационных сигналов в НАП ГНСС. При этом мощность ложных навигационных сигналов задается дискретно в интервале от Pлнсmin до Pлнсmax с шагом ΔPAC, соответствующим значению защитного интервала алгоритма антиспуфинга помехоустойчивой НАП ГНСС 9, согласно (1)-(4).
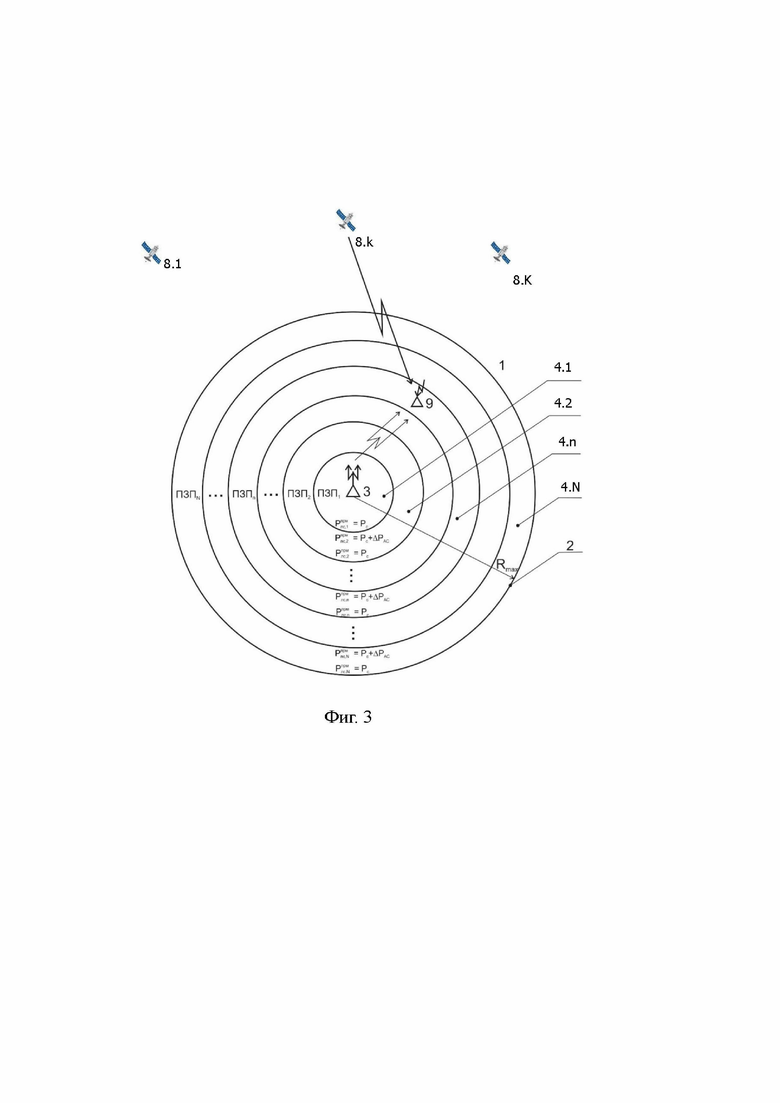
В результате в заданном районе формируется N парциальных зон подавления. На фиг.3 показаны парциальные зоны подавления (ПЗП) 4n, где n=1, 2, …, N, помехоустойчивой НАП ГНСС 9, формируемые станцией помех 3, излучающей ложный навигационный сигнал в виде совокупности из N ложных навигационных сигналов для каждого k-го видимого навигационного спутника ГНСС 8.k в соответствии с предложенным способом. При этом в пределах каждой n-ой парциальной зоны подавления мощность соответствующего n-го ложного навигационного сигнала ЛНСn на входе приемника помехоустойчивой НАП ГНСС с учетом ослабления навигационного сигнала при его распространении будет изменяться от (на дальней, от станции помех 3, ее границе) до (на ближней ее границе). При этом совокупность всех N парциальных зон подавления для всех N ложных навигационных сигналов перекроют весь заданный район 1, ограниченный окружностью 2 с центром в точке установки станции помех 3 и радиусом .
Тогда, любой потребитель, оборудованный помехоустойчивой НАП ГНСС 9 и случайным образом расположенный в пределах заданного района 1, попадет в ту или иную n-ю парциальную зону подавления, где мощность соответствующего ложного навигационного сигнала  на входе приемника помехоустойчивой НАП ГНСС 9 будет превышать мощность
на входе приемника помехоустойчивой НАП ГНСС 9 будет превышать мощность  истинного навигационного сигнала ГНГСС 8 на величину, не превышающую величину защитного интервала алгоритма антиспуфинга (фиг.3).
истинного навигационного сигнала ГНГСС 8 на величину, не превышающую величину защитного интервала алгоритма антиспуфинга (фиг.3).
На фиг.4 показаны соотношения уровней истинного навигационного сигнала k-го видимого навигационного спутника ГНСС и совокупности ложных навигационных сигналов на выходе коррелятора помехоустойчивой НАП ГНСС при случайном ее расположении в пределах n-ой парциальной зоны подавления заданного района. При этом уровни ложных навигационных сигналов, соответствующих более удаленным от станции помех парциальным зонам подавления (ложный навигационный сигнал ЛНСN на фиг.4) будут превышать уровень истинного навигационного сигнала на величину, превышающую величину защитного интервала алгоритма антиспуфинга и алгоритм антиспуфинга блокирует эти ложные навигационные сигналы. Уровни ложных навигационных сигналов, соответствующих менее удаленным от станции помех парциальным зонам подавления (ложные навигационные сигналы ЛНС1 и ЛНС2 на фиг.4) будут меньше уровня истинного навигационного сигнала и по этой причине не могут быть взяты на сопровождение в системе вторичной обработки НАП ГНСС. Уровень n-го ложного навигационного сигнала, соответствующего n-ой парциальной зоне подавления, в пределах которой расположен потребитель, оборудованный помехоустойчивой НАП ГНСС, будет превышать мощность истинного навигационного сигнала на величину, не превышающую величину защитного интервала алгоритма антиспуфинга . При этом алгоритм антиспуфинга не блокирует n-й ложный навигационный сигнал, и система вторичной обработки НАП ГНСС берет ложный навигационный сигнал на сопровождение (как имеющий максимальный уровень) с точной оценкой ложных значений его задержки и доплеровской частоты, которые далее используются для определения координат НАП ГНСС.
Таким образом, при использовании предложенного способа любой потребитель, оборудованный помехоустойчивой НАП ГНСС и случайным образом расположенный в пределах заданного района, попадет в ту или иную парциальную зону подавления, где мощность соответствующего ложного навигационного сигнала на входе приемника помехоустойчивой НАП ГНСС будет превышать мощность истинного навигационного сигнала на величину, не превышающую величину защитного интервала алгоритма антиспуфинга , что не позволит алгоритму антиспуфинга заблокировать соответствующий ложный сигнал и он будет «навязан» помехоустойчивой НАП ГНСС.
При этом совокупность всех N парциальных зон подавления перекроет весь заданный район.
Таким образом, при реализации предложенного способа создания ложных навигационных сигналов зона подавления помехоустойчивой НАП ГНСС расширится до размера, соответствующего размеру всего заданного района.
Источники информации
1. Патент №2495527 Российская Федерация, МПК H04K 3/00. Способ и устройство создания преднамеренных помех : № 2012123325 : заявл. 05.06.2012 : опубл. 10.10.2013 / Давиденко А.С., Куликолв М.В., Митянин А.Г., Смирнов П.Л, Соломатин А.И., Терентьев А.В., Царик О.В., Шипилов А.М., Шишков А.Я. ; заявитель Федеральное государственное казенное военное образовательное учреждение высшего профессионального образования "ВОЕННАЯ АКАДЕМИЯ СВЯЗИ имени Маршала Советского Союза С.М. Буденного" Министерства обороны Российской Федерации (RU), Общество с ограниченной ответственностью "Специальный Технологический Центр" (RU). - 15 с. : ил. - Текст : непосредственный.
| название | год | авторы | номер документа |
|---|---|---|---|
| Приемник аппаратуры потребителей сигналов глобальных навигационных спутниковых систем, обеспечивающий обнаружение и блокирование ложных навигационных сигналов | 2024 |
|
RU2829323C1 |
| СИСТЕМА РАДИОПОДАВЛЕНИЯ НАВИГАЦИОННОЙ АППАРАТУРЫ ПОТРЕБИТЕЛЕЙ ГНСС ПРОТИВНИКА, СОВМЕСТИМАЯ С ОТЕЧЕСТВЕННОЙ АППАРАТУРОЙ ПОТРЕБИТЕЛЕЙ ГНСС | 2013 |
|
RU2539563C1 |
| СПОСОБ И УСТРОЙСТВО СОЗДАНИЯ ПРЕДНАМЕРЕННЫХ ПОМЕХ | 2012 |
|
RU2495527C1 |
| Устройство обнаружения источников ложных навигационных сигналов НАП ГНСС | 2018 |
|
RU2677929C1 |
| Пространственно-распределенная система радиоподавления НАП ГНСС с функцией альтернативного координатно-временного обеспечения для санкционированных потребителей | 2017 |
|
RU2649407C1 |
| СПОСОБ РАДИОЭЛЕКТРОННОГО ПОДАВЛЕНИЯ АППАРАТУРЫ ПОТРЕБИТЕЛЕЙ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ В ПРЕДЕЛАХ ЗАЩИЩАЕМОЙ ТЕРРИТОРИИ | 2014 |
|
RU2581602C1 |
| Способ локальной радионавигации по сигналам несинхронизированных отечественных средств радиоэлектронного подавления глобальных навигационных спутниковых систем | 2021 |
|
RU2770127C1 |
| Навигационная аппаратура санкционированного потребителя с возможностью локальной навигации по сигналам несинхронизированных отечественных средств радиоэлектронного подавления глобальных навигационных спутниковых систем | 2021 |
|
RU2771435C1 |
| СПОСОБ И УСТРОЙСТВО СОЗДАНИЯ ПРЕДНАМЕРЕННЫХ ПОМЕХ | 2013 |
|
RU2543078C1 |
| Пространственно-распределительный комплекс создания радиопомех навигационной аппаратуре потребителей глобальных навигационных систем с многофункциональным использованием радиоэлектронного оборудования | 2015 |
|
RU2616286C1 |
Изобретение относится к радиотехнике, а именно к способам создания преднамеренных имитирующих радиопомех навигационной аппаратуре потребителей (НАП) глобальной навигационной спутниковой системы (ГНСС). Техническим результатом является увеличение размера зоны подавления, в пределах которой обеспечивается «навязывание» ложных навигационных сигналов помехоустойчивой НАП ГНСС, использующей алгоритм антиспуфинга, основанный на анализе энергетических характеристик принимаемых сигналов, до размеров всего заданного района. В заявленном способе для каждого «видимого» НС формируют и излучают N ложных навигационных сигналов, отличающихся друг от друга по задержке и доплеровской частоте, что необходимо для раздельного приема ложных навигационных сигналов в НАП ГНСС, и по мощности. При этом значение мощности излученных ложных навигационных сигналов Pлнс,n задается дискретно в интервале от Pлнс,min до Pлнс,max с шагом ΔPAC, соответствующим значению защитного интервала алгоритма антиспуфинга (АС) помехоустойчивой НАП ГНСС. Это обеспечивает увеличение размера зоны подавления, в пределах которой обеспечивается «навязывание» ложных навигационных сигналов помехоустойчивой НАП ГНСС, использующей алгоритм антиспуфинга, основанный на анализе энергетических характеристик принимаемых навигационных сигналов, за счет того, что для каждого n-го ложного навигационного сигнала (лнс,n) формируется n-я парциальная зона подавления (ПЗПn), в пределах которой мощность n-го ложного навигационного сигнала на входе приемника помехоустойчивой НАП ГНСС будет изменяться от  (на дальней ее границе) до
(на дальней ее границе) до  (на ближней ее границе). При этом совокупность всех N парциальных зон подавления для всех N ложных навигационных сигналов перекроют весь заданный район. 4 ил.
(на ближней ее границе). При этом совокупность всех N парциальных зон подавления для всех N ложных навигационных сигналов перекроют весь заданный район. 4 ил. 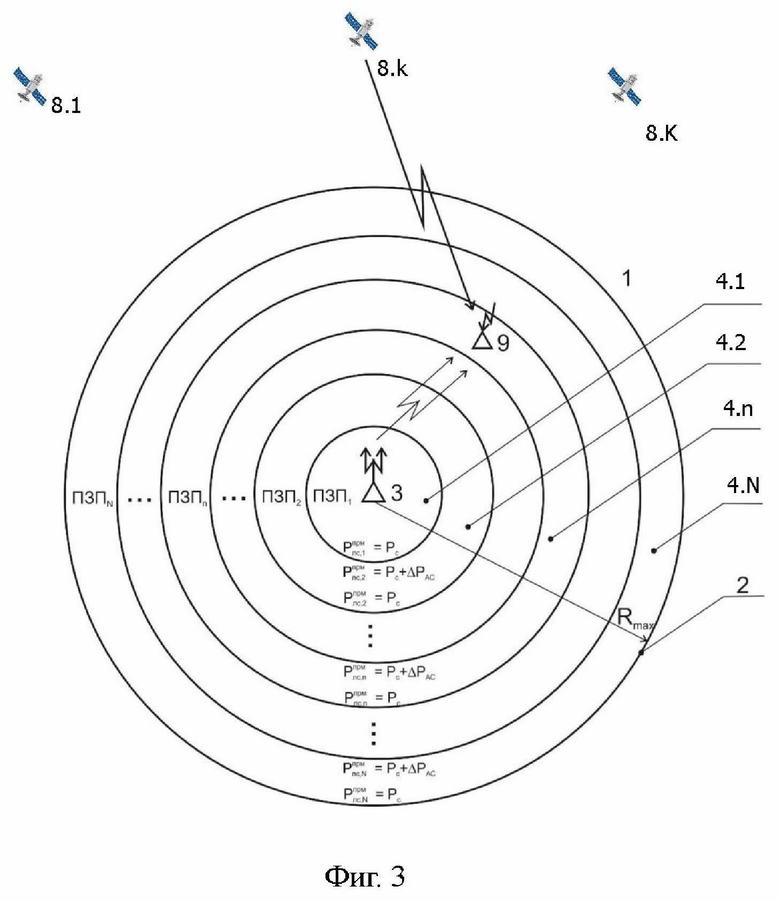
Способ создания имитирующих радиопомех помехоустойчивой навигационной аппаратуре потребителей глобальной навигационной спутниковой системы (НАП ГНСС), заключающийся в том, что принимают истинные навигационные сигналы, передаваемые работоспособными навигационными спутниками (НС) ГНСС, «видимыми» в заданном районе, определяют номера работоспособных НС ГНСС, «видимых» в заданном районе, по принятым сигналам определяют свое местоположение, запоминают принятые истинные навигационные сигналы «видимых» НС, для каждого «видимого» НС формируют ложный навигационный сигнал путем смещения по задержке и доплеровской частоте истинного навигационного сигнала и искажения его навигационного сообщения, формируют имитирующую радиопомеху, представляющую собой суммарный помеховый сигнал в виде совокупности ложных навигационных сигналов всех «видимых» НС, синхронизируют ложные навигационные сигналы с истинными навигационными сигналами «видимых» НС ГНСС, излучают ложные навигационные сигналы в заданном районе, отличающийся тем, что для каждого «видимого» НС формируют N ложных навигационных сигналов, отличающихся друг от друга по задержке и доплеровской частоте, а мощности излученных ложных навигационных сигналов Pлнс,n задаются дискретно в интервале от Pлнс,min до Pлнс,max с шагом ΔPAC, соответствующим значению защитного интервала алгоритма антиспуфинга (АС) помехоустойчивой НАП ГНСС
где Pс,дБ – мощность истинных сигналов НС у поверхности Земли (указана в интерфейсном контрольном документе ГНСС); L – функция затухания излученного ложного навигационного сигнала в зависимости от дальности распространения; Rmax – расстояние от станции помех до границы заданного района; raund(⋅) – оператор округления до большего целого; n=1, …, N – номер ложного навигационного сигнала; ΔPAC – величина защитного интервала,
обеспечивающие увеличение размера зоны подавления, в пределах которой осуществляется «навязывание» ложных сигналов помехоустойчивой НАП ГНСС, использующей алгоритм антиспуфинга, основанный на анализе энергетических характеристик принимаемых сигналов и блокировании ложных сигналов, уровень которых превышает уровень истинного навигационного сигнала на величину, превышающую значение установленного защитного интервала ΔPAC, до размера всего заданного района.
| СПОСОБ И УСТРОЙСТВО СОЗДАНИЯ ПРЕДНАМЕРЕННЫХ ПОМЕХ | 2012 |
|
RU2495527C1 |
| СПОСОБ И УСТРОЙСТВО СОЗДАНИЯ ПРЕДНАМЕРЕННЫХ ПОМЕХ | 2013 |
|
RU2543078C1 |
| Способ радиоэлектронного подавления приемных устройств потребителей глобальных навигационных спутниковых систем | 2018 |
|
RU2696558C1 |
| СПОСОБ СОЗДАНИЯ РЕТРАНСЛИРОВАННЫХ ПОМЕХ | 2012 |
|
RU2523430C2 |
| РОМАНОВ А.С., ТУРЛЫКОВ П.Ю | |||
| Исследование влияния имитирующих помех на аппаратуру потребителей навигационной информации // Труды МАИ | |||
| Токарный резец | 1924 |
|
SU2016A1 |
| Пюпитр для работы на пишущих машинах | 1922 |
|
SU86A1 |
| DE 202006014908 U1, 01.02.2007 | |||
| Устройство для контроля исправности изолирующих стыков в рельсовых цепях | 1981 |
|
SU965856A1 |

