Область техники, к которой относится изобретение
Настоящее изобретение относится к машинам, например, землеройным, горнодобывающим, строительным машинам и т.п., которые используют рабочие орудия для перемещения объектов или обработки материалов. Более конкретно, настоящее изобретение относится к машинам, в которых используется система мониторинга орудия для земляных работ, и которая позволяет оператору или системе управления такой машиной обнаруживать, изношено, повреждено или отсутствует орудие для земляных работ.
Предпосылки создания изобретения
Машины обычно используются в отраслях производства земляных работ, строительных, горнодобывающих и других подобных отраслях. Эти машины применяются для решения различных задач и поэтому используют множество различных рабочих орудий. Например, гидравлический карьерный экскаватор с передним ковшом (иногда называемый гидравлическим карьерным экскаватором с передней лопатой, сокращенно HMS-FS), может использовать ковш с орудиями для земляных работ (GET) для врезания в землю, зачерпывая и удержания земли, а также для перемещения земли в другое место. В некоторых случаях орудие для земляных работ может подвергаться износу, повреждаться или вообще теряться в ходе эксплуатации. Если это не обнаружить, то эффективность работы рабочего орудия, например, ковша может резко снизиться.
Чтобы решить эту проблему, можно использовать датчики, например, камеры и т.п., которые обеспечивают обзор орудия для земляных работ, чтобы предупредить оператора о том, что орудие для земляных работ нуждается в обслуживании или замене. Камера способна отправлять изображение в кабину машины, которое оператор может просматривать и обнаруживать наличие проблемы.
Однако обычно используется только одна такая камера или другой датчик. Таким образом, в некоторых ситуациях мониторинг состояния орудия для земляных работ может быть затруднен. В частности, у таких систем часто отсутствует способность обнаружения износа орудия для земляных работ с требуемым уровнем точности.
Например, в патенте США № 9 139 977 B2, под авторством McCain et al., раскрывается система для определения ориентации рабочего орудия на транспортном средстве. Система содержит камеру, установленную на транспортном средстве, и исследуемый объект в поле зрения камеры, установленный на рабочем орудии. Исследуемый объект включает метки, позволяющие определить ориентацию рабочего орудия по отношению к камере. Таким образом, предлагается способ определения ориентации рабочего орудия на транспортном средстве. Таким же образом предлагается система ориентации рабочего орудия. Предлагается другой способ установки системы ориентации рабочего орудия. Также предлагается машиночитаемый носитель данных, на котором хранятся исполняемые компьютером команды. Исполняемые компьютером команды после их выполнения служат причиной осуществления процессором способа определения ориентации рабочего орудия.
Аналогичным образом в опубликованной заявке на патент США № 2017/0094154 A1, под авторством Kawamoto et al., раскрывается система мониторинга несколькими камерами, установленная в кабине, для определения необходимости корректировки позиционирования машины. Система корректировки устройства захвата изображения содержит, по меньшей мере, два устройства захвата изображения и устройство обработки, которое изменяет параметр, определяющий позицию второго устройства захвата изображения, в результате установки постоянного расстояния между первым устройством захвата изображения и вторым устройством захвата изображения в, по меньшей мере, двух устройствах захвата изображения, поиска соответствующего участка между парой изображений, полученных первым устройством захвата изображения и вторым устройством захвата изображения, и получение параметра на основе результата поиска.
Как следует из патента ‘977 и опубликованной заявки на патент ‘154 в них не раскрывается время начала обслуживания или замены GET. Соответственно, существует необходимость разработки системы мониторинга орудия для земляных работ, которая обеспечивает лучшую точность и надежность определения отсутствия, повреждения или износа GET в целях своевременного обслуживания или замены GET.
Краткое изложение существа изобретения
В соответствии с вариантом осуществления настоящего изобретения, предлагается способ мониторинга состояния орудия для земляных работ машины с использованием системы мониторинга GET. Способ может содержать: определение размера орудия для земляных работ, установленного на рабочем орудии, с использованием нескольких датчиков, принимающих сигналы от орудия для земляных работ под разными углами; сравнение определенного размера орудия для земляных работ, установленного на рабочем орудии, с теоретическим размером орудия для земляных работ; и вычисление отклонения между определенным размером и теоретическим размером.
Согласно варианту осуществления настоящего изобретения предлагается система мониторинга GET для мониторинга состояния орудия для земляных работ, установленного на рабочем орудии. Система может содержать: несколько датчиков, выполненных для проведения измерения орудия для земляных работ, установленного на рабочем орудии, по меньшей мере, под двумя разными углами; и электронный контроллер, соединенный с несколькими датчиками, где электронный контроллер выполняется способным: определять размер орудия для земляных работ, установленного на рабочем орудии; сравнивать определенный размер орудия для земляных работ, установленного на рабочем орудии, с теоретическим размером нового орудия для земляных работ, установленного на рабочем орудии; и рассчитывать отклонение между определенным размером и теоретическим размером.
Предлагается электронный контроллер (ECU) машины в соответствии с вариантом осуществления настоящего изобретения. ECU может содержать: запоминающее устройство, содержащее исполняемые компьютером команды для распознавания орудия для земляных работ; процессор, соединенный с запоминающим устройством и способный выполнять исполняемые компьютером команды; исполняемые компьютером команды, выполненные процессором, служат причиной определения процессором: размера орудия для земляных работ, установленного на рабочем орудии; сравнения определенного размера землеройного орудия, установленного на рабочем орудии, с теоретическим размером нового землеройного орудия, установленного на рабочем орудии; и расчета отклонения между определенным размером и теоретическим размером.
Краткое описание рисунков
Прилагаемые рисунки, которые включены в настоящее раскрытие и составляют часть описания, иллюстрируют примерные варианты осуществления изобретения и, вместе с описанием, служат для объяснения принципов изобретения.
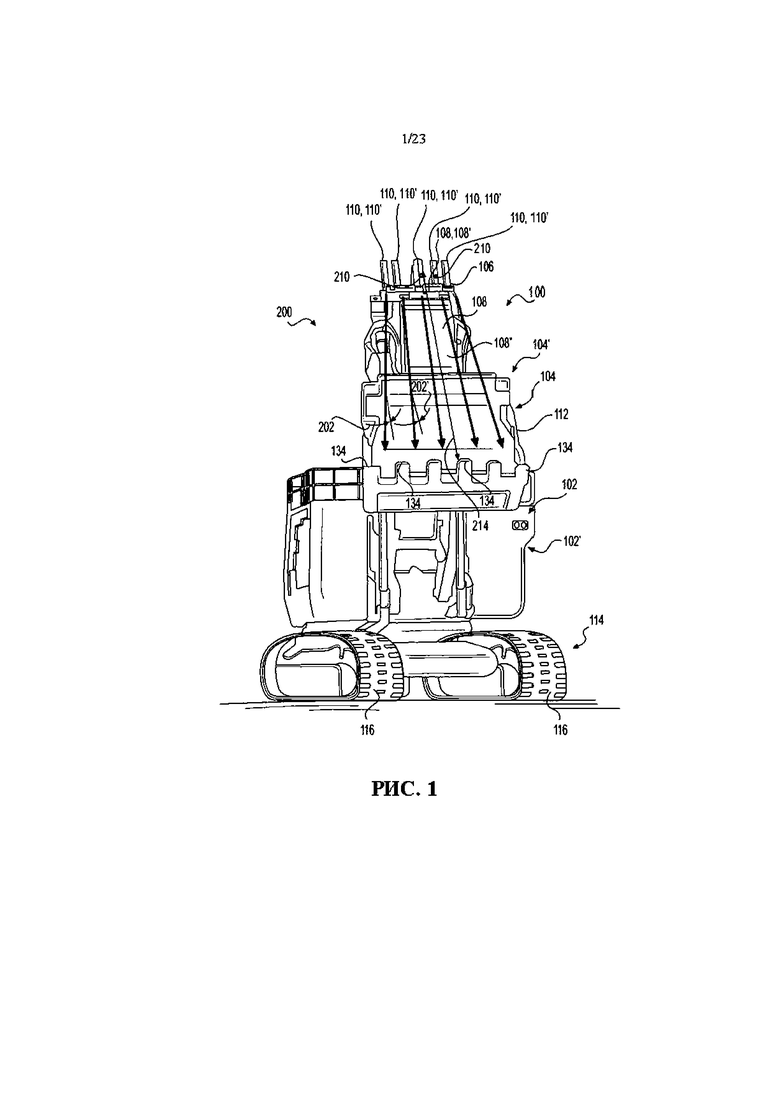
На рис. 1 представлен вид в перспективе машины, в соответствии с вариантом осуществления настоящего изобретения, использующей систему мониторинга GET с несколькими датчиками, например, камерами для обнаружения износа, повреждения или наличия GET.
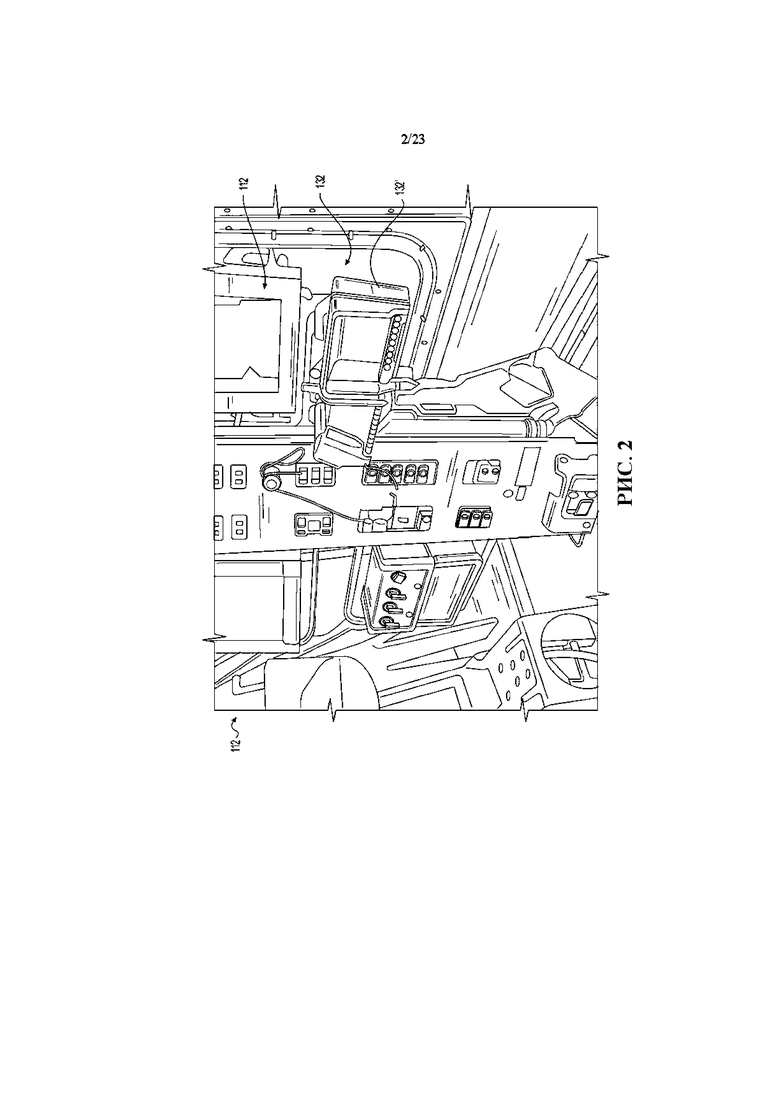
На рис. 2 представлена внутренняя часть кабины машины, изображенной на РИС. 1, с монитором, используемым как часть системы мониторинга GET, изображенной на рис. 1.
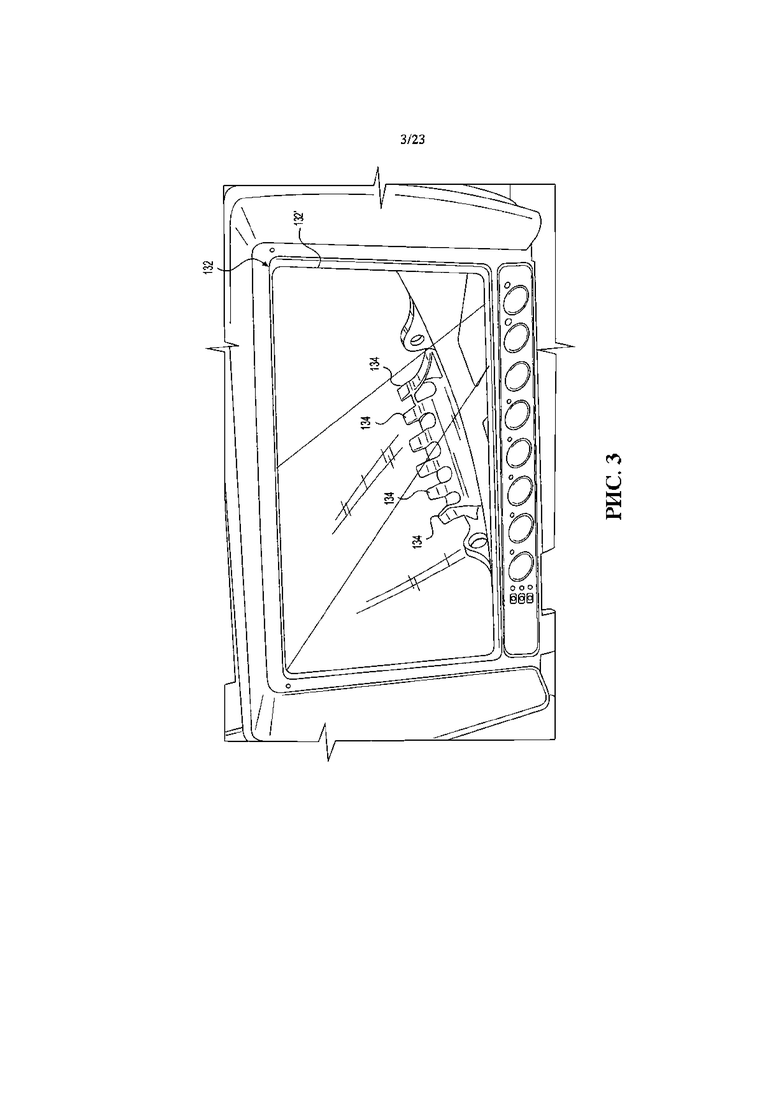
На рис. 3 представлен увеличенный вид спереди монитора, изображенного на рис. 3, с изображением ковша и его орудий для земляных работ машины, изображенной на рис. 1.
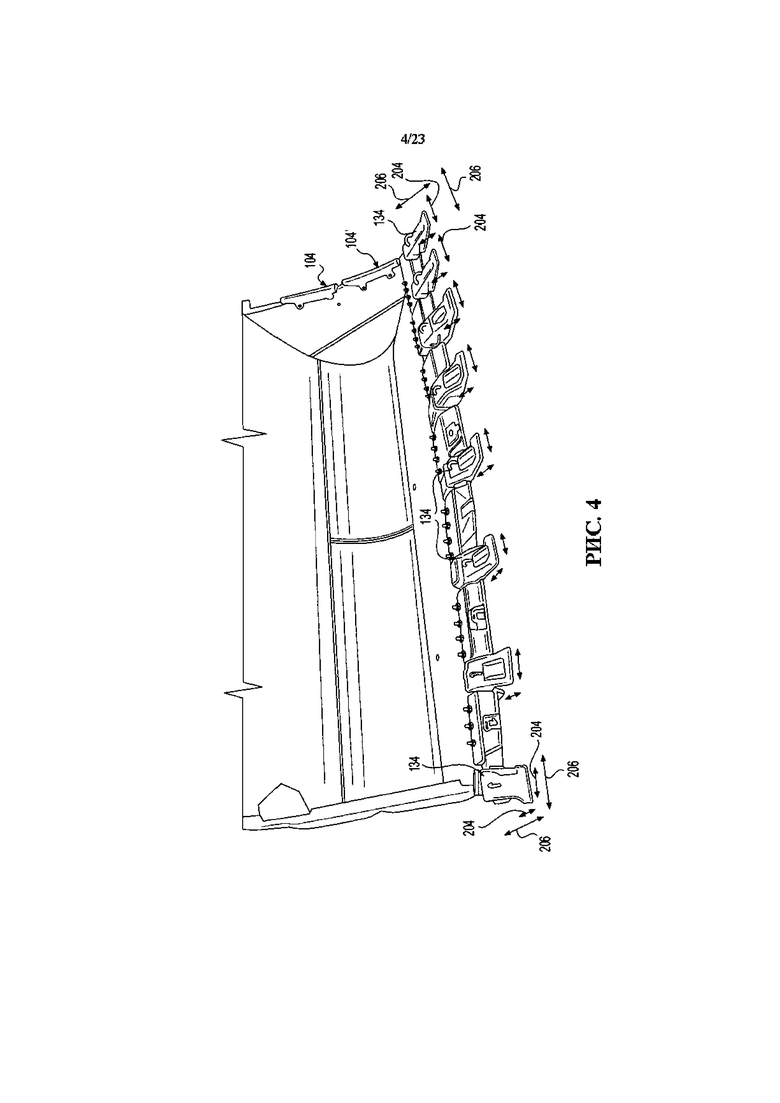
На рис. 4 представлен вид в перспективе спереди ковша и восьми орудий для земляных работ (например, коронок), их соответствующая ширина и расстояние выступа от ковша, которые отслеживаются системой мониторинга GET, изображенной на рис. 1.
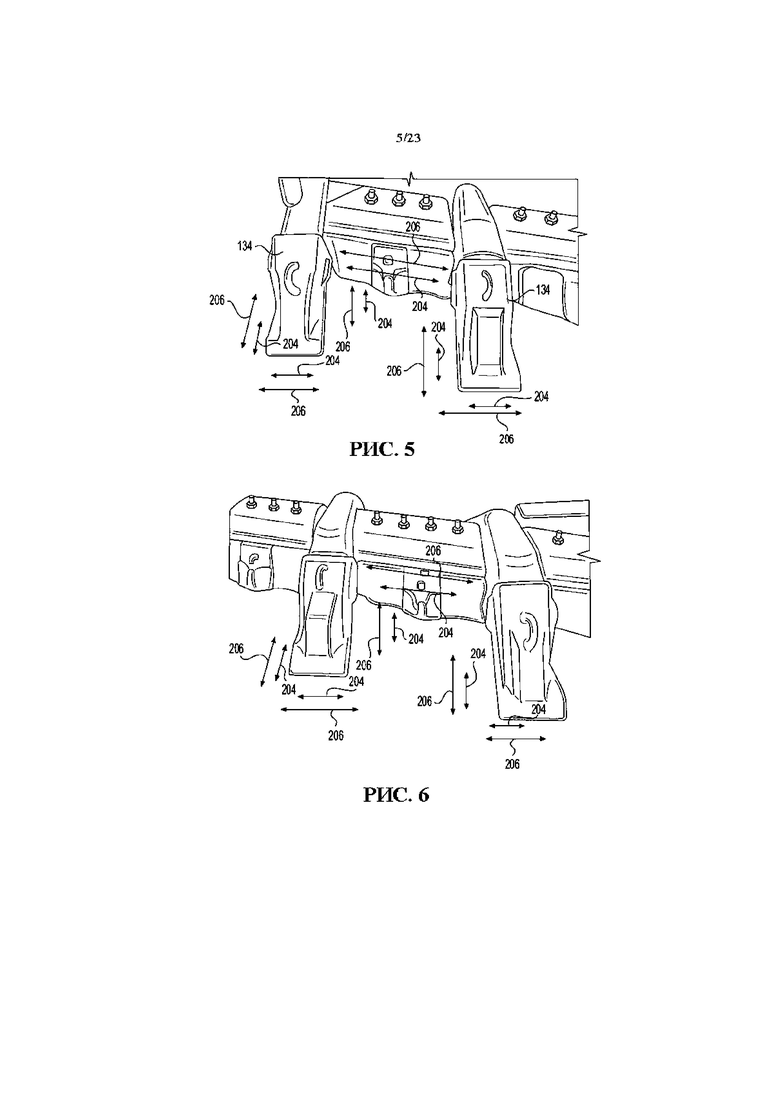
На рис. 5 представлены два крайних левых экземпляра орудий для земляных работ, изображенных на рис. 4, и защитная накладка, расположенная между ними, причем все они имеют размеры, которые отслеживаются системой мониторинга GET.
На рис. 6 представлено то же самое, что и на рис. 5, за исключением того, что отслеживаемый участок ковша был смещен вправо на одну коронку на рис. 4.
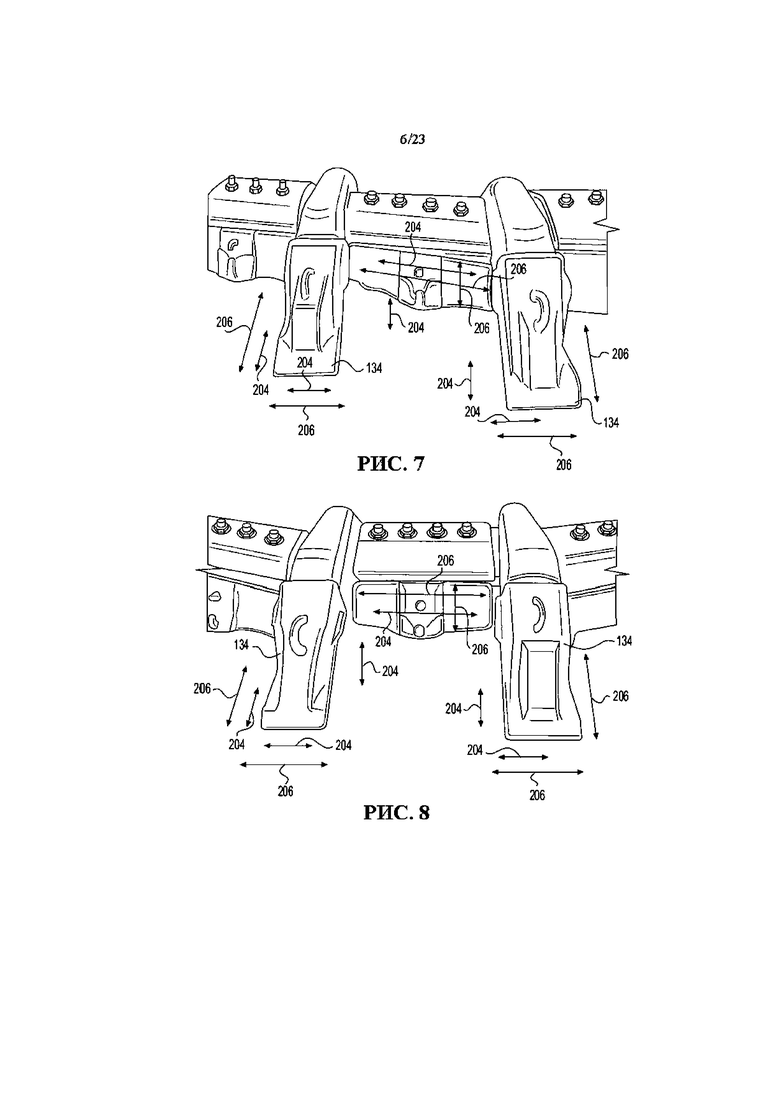
На рис. 7 представлено то же самое, что и на рис. 6, за исключением того, что отслеживаемый участок ковша был смещен вправо на одну коронку на рис. 4.
На рис. 8 представлено то же самое, что и на рис. 7, за исключением того, что отслеживаемый участок ковша был смещен вправо на одну коронку на рис. 4, следовательно, две показанных коронки, находятся по обе стороны от средней линии ковша.
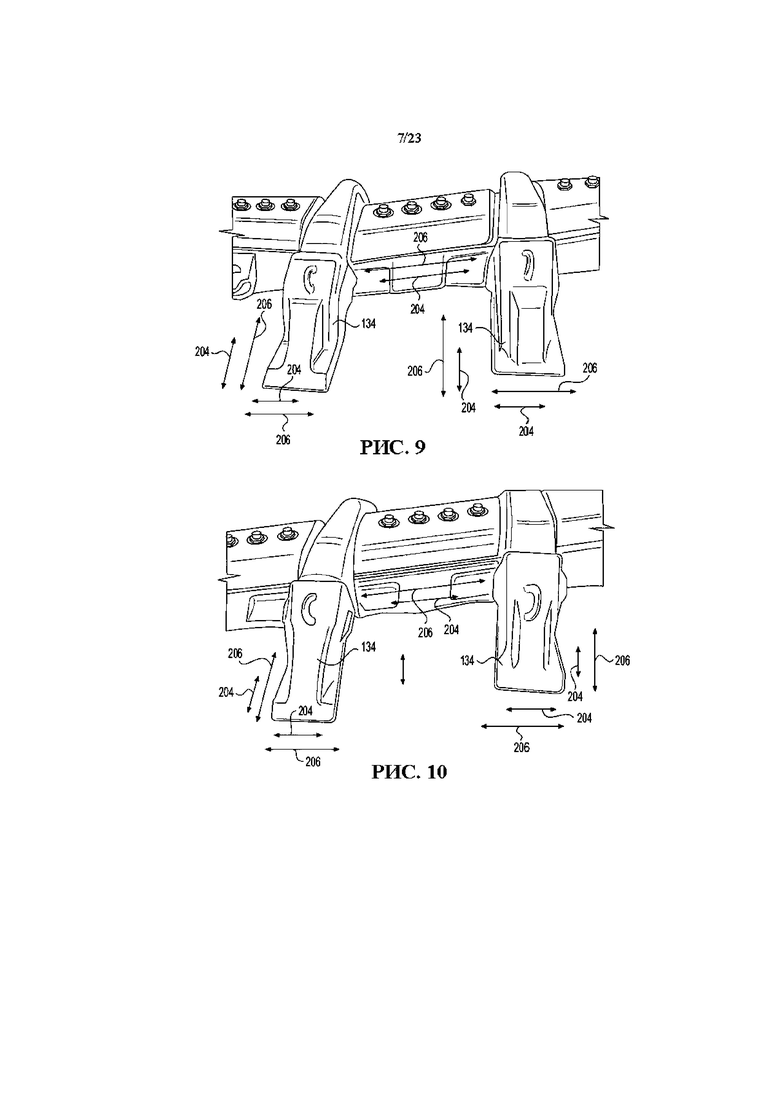
На рис. 9 представлено то же самое, что и на рис. 8, за исключением того, что отслеживаемый участок ковша был смещен вправо на одну коронку на рис. 4.
На рис. 10 представлено то же самое, что и на рис. 9, за исключением того, что отслеживаемый участок ковша был смещен вправо на одну коронку вправо на рис. 4.
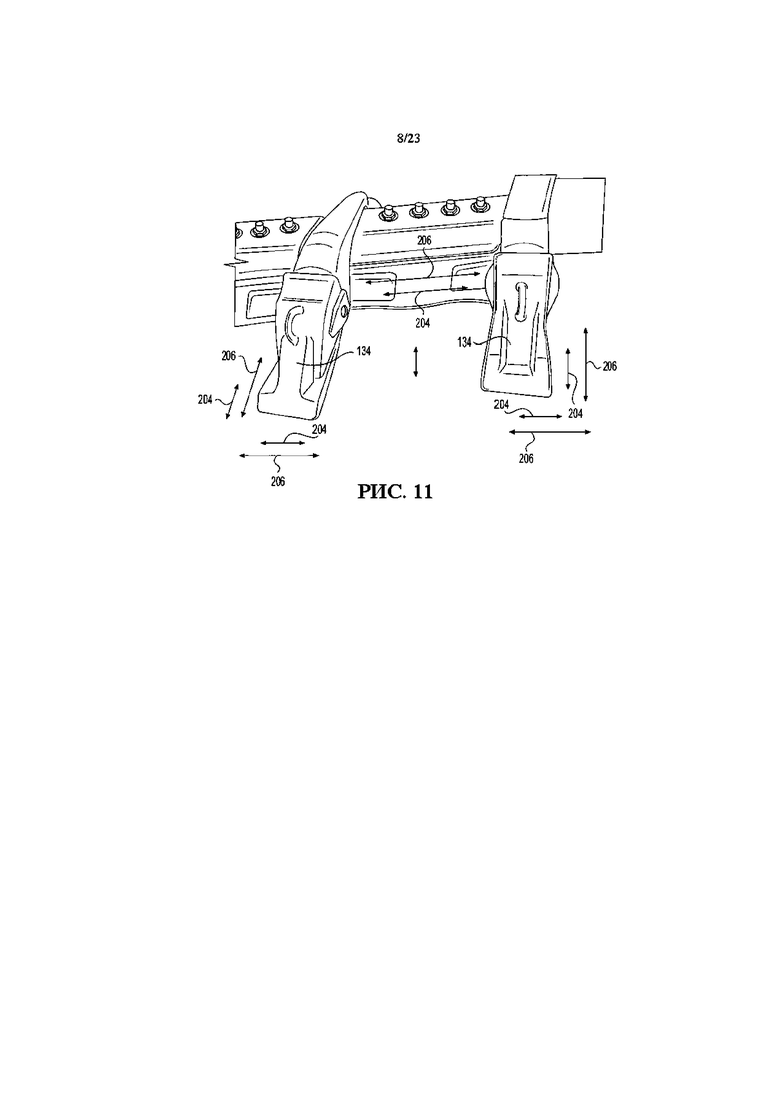
На рис. 11 представлено то же самое, что и на рис. 10, за исключением того, что отслеживаемый участок ковша был смещен вправо на одну коронку вправо на рис. 4, следовательно, показаны две крайние правые коронки ковша.
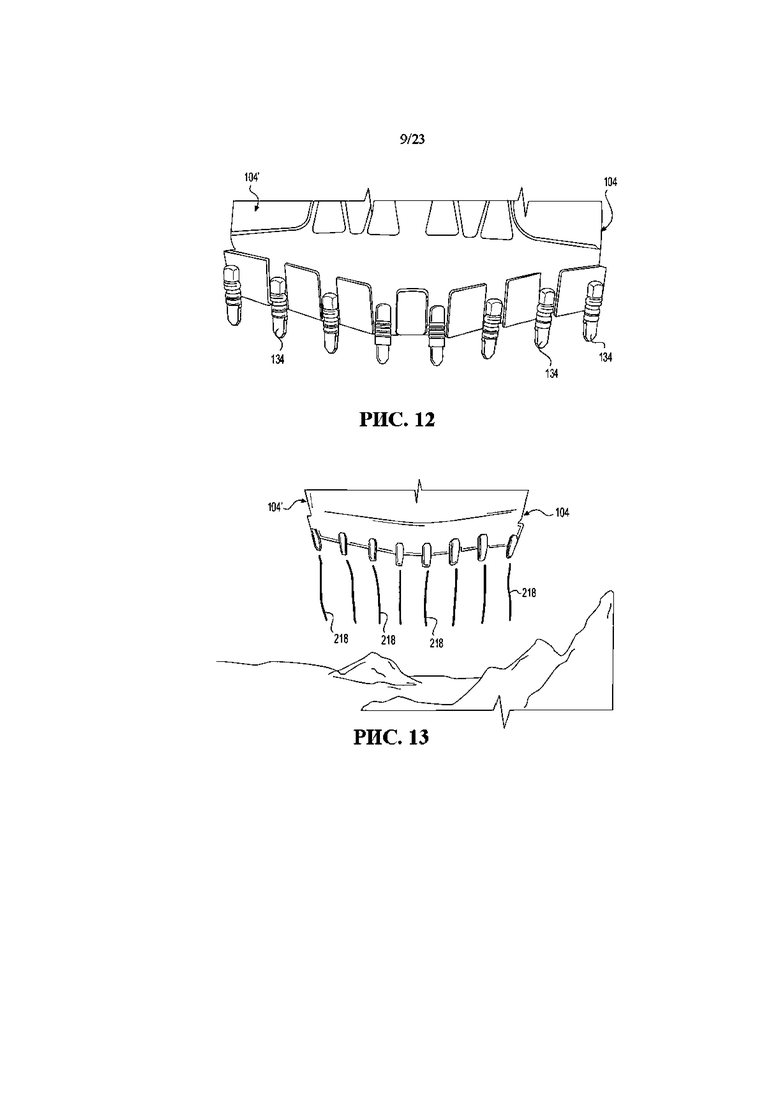
На рис. 12 показано, как система мониторинга GET может исследовать зубья ковша, изображенного на рис. 4, на нижней части ковша, в соответствии с вариантом осуществления настоящего изобретения.
На рис. 13 показано, как система мониторинга GET может использовать кинематическую границу действия GET для облегчения анализа посторонних изображений, в соответствии с другим вариантом осуществления настоящего изобретения.
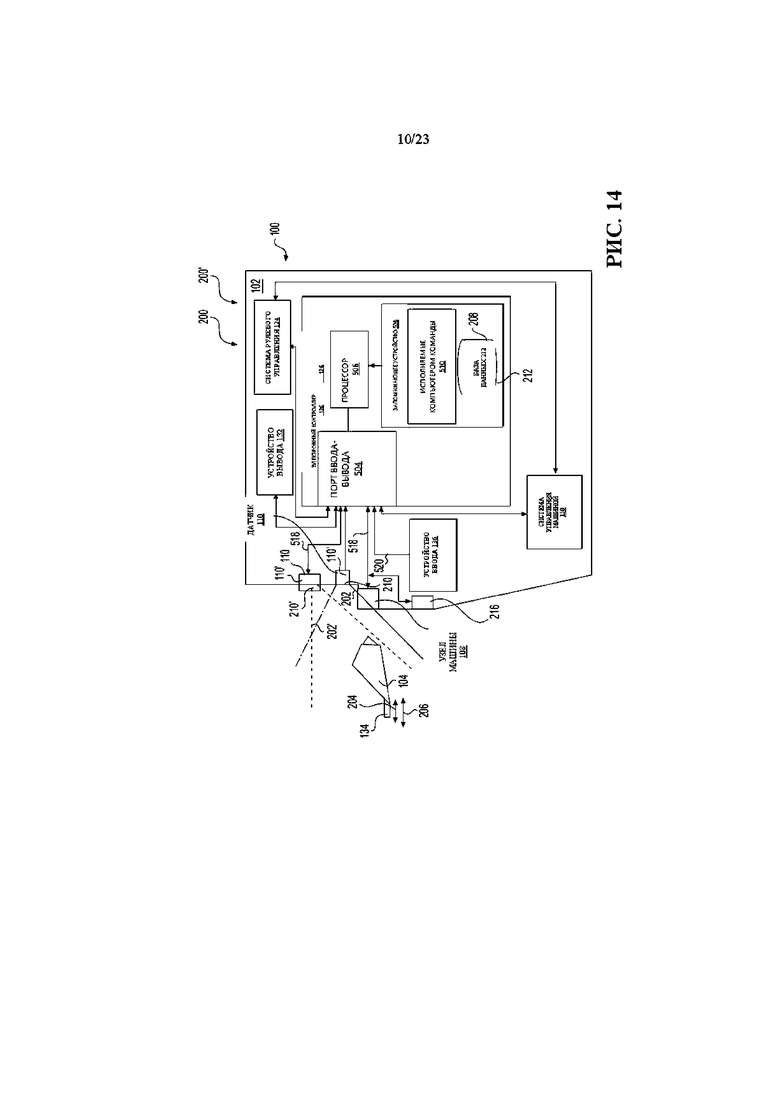
На рис. 14 представлена блок-схема системы мониторинга GET машины, изображенной на рис. 1 в соответствии со способом по настоящему изобретению.
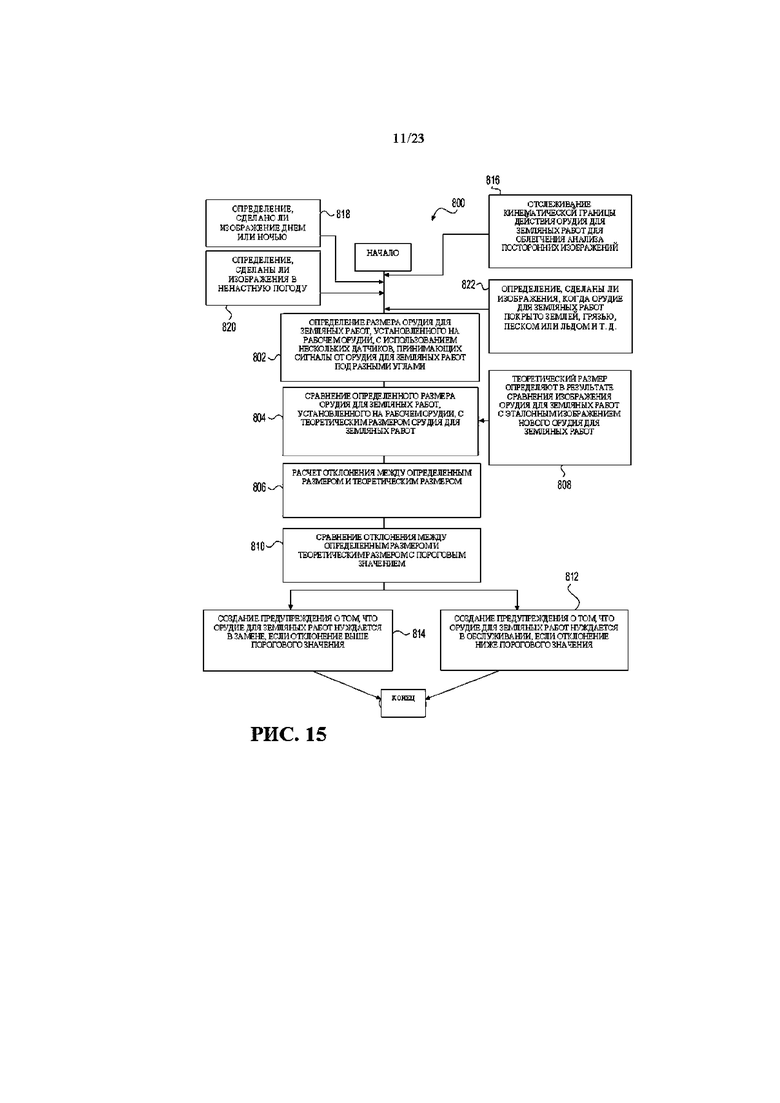
На рис. 15 представлена блок-схема, изображающая способ использования системы мониторинга GET в соответствии со способом по настоящему изобретению.
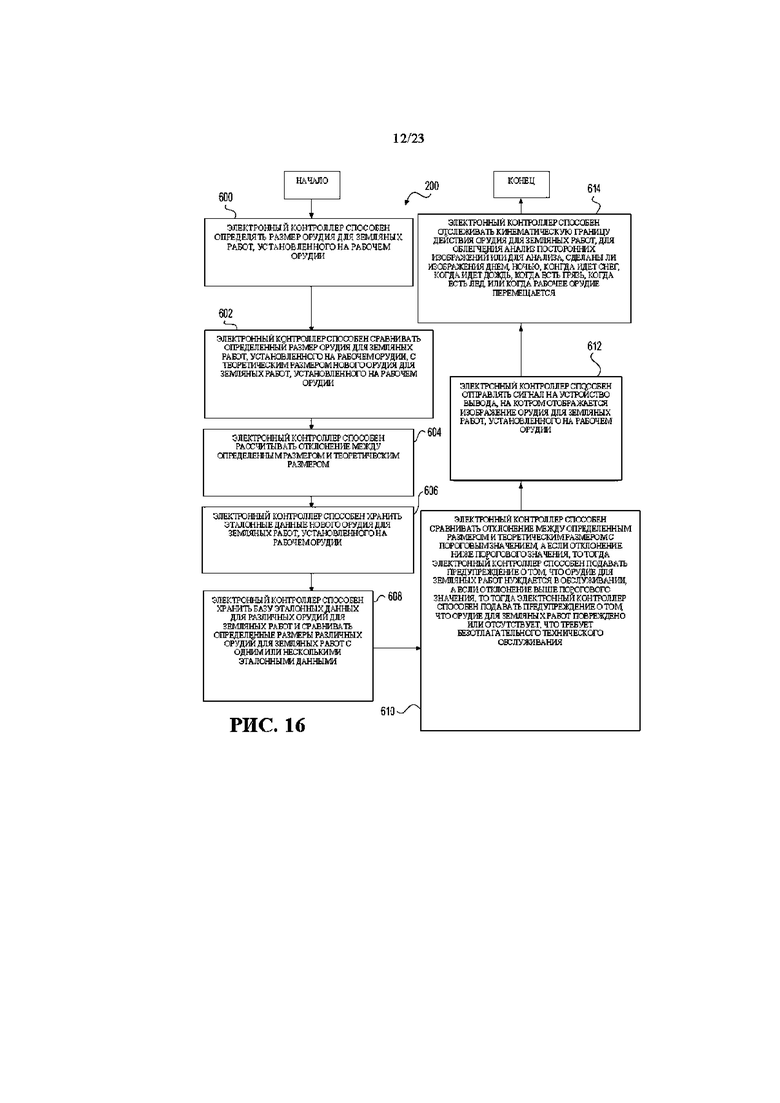
На рис. 16 представлена блок-схема, изображающая процесс конфигурации электронного контроллера системы мониторинга GET, изображенного на рис. 14.
На рис. 17 представлена блок-схема, изображающая процесс выполнения процессором набора исполняемых компьютером команд, которые могут использоваться системой мониторинга GET, изображенной на рис. 14.
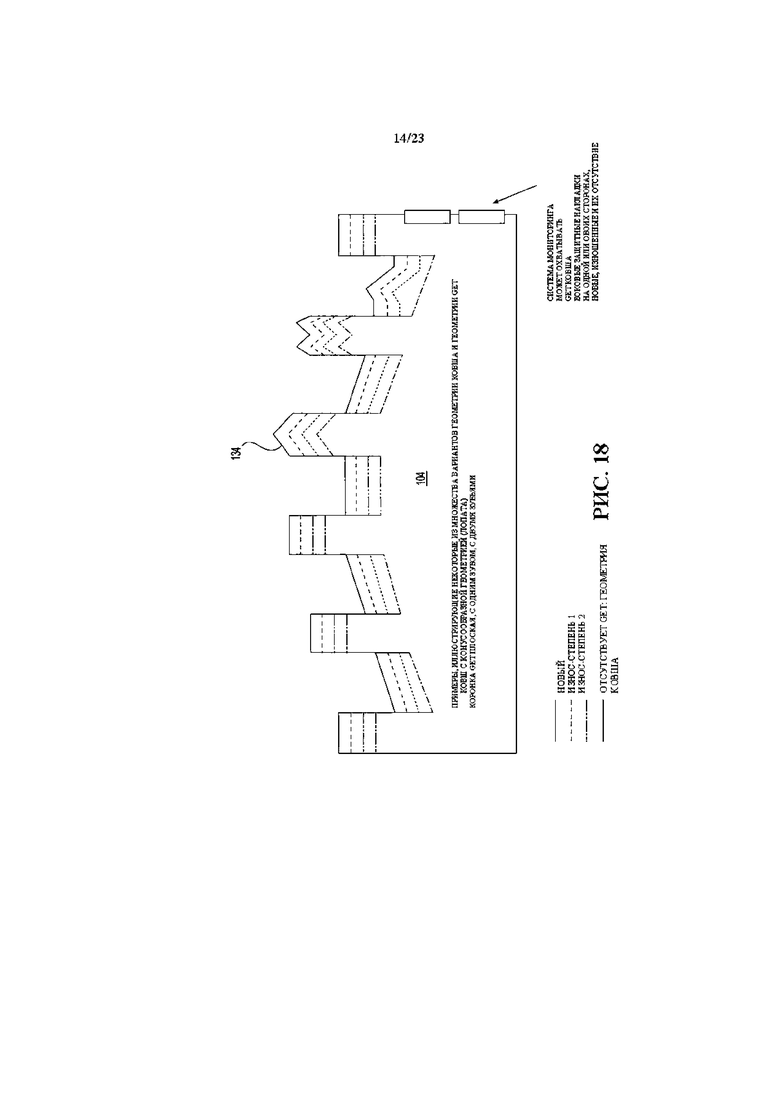
На рис. 18 представлены некоторые из множества профилей рабочего орудия, например, ковша, и связанных с ним орудий для земляных работ, которые можно отслеживать с использованием различных вариантов осуществления систем и способов мониторинга рабочих орудий, раскрытых в данном документе.
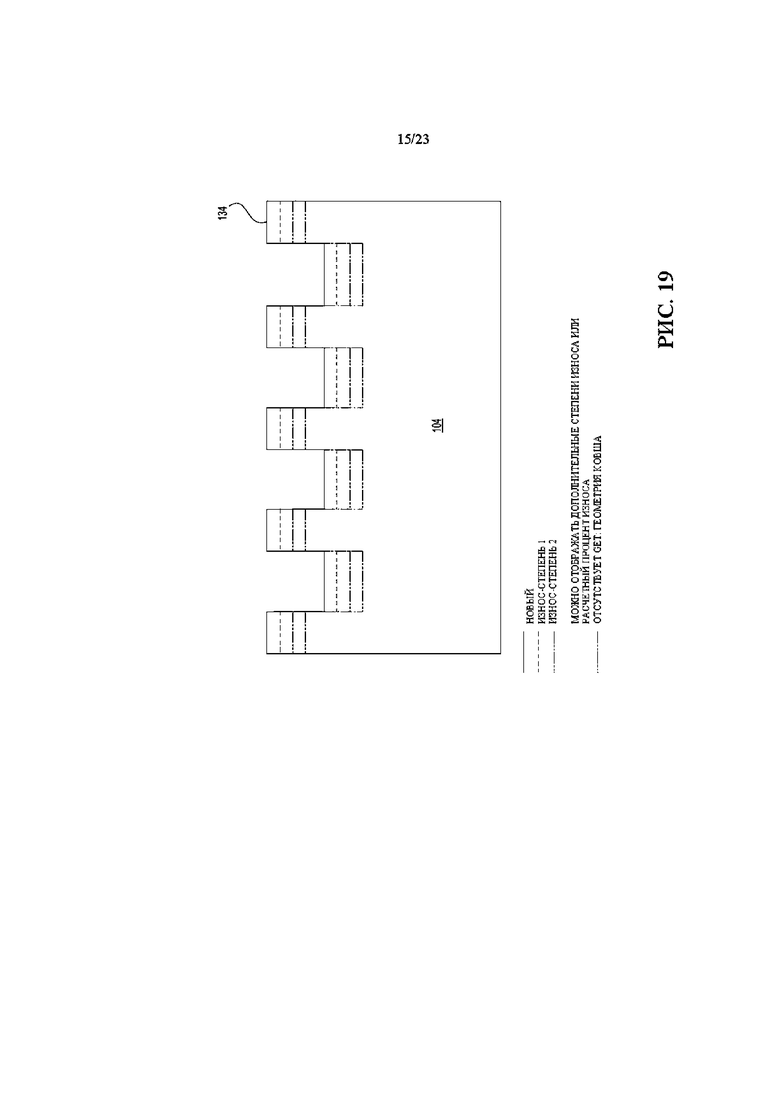
На рис. 19 представлен схематический профиль рабочего орудия, например, ковша, включая его орудия для земляных работ, с различной степенью износа, при которой оператор или система могут получать предупреждения. Эти различные степени износа могут быть заранее запрограммированы в различных вариантах осуществления систем и способов мониторинга рабочих орудий, раскрытых в данном документе.
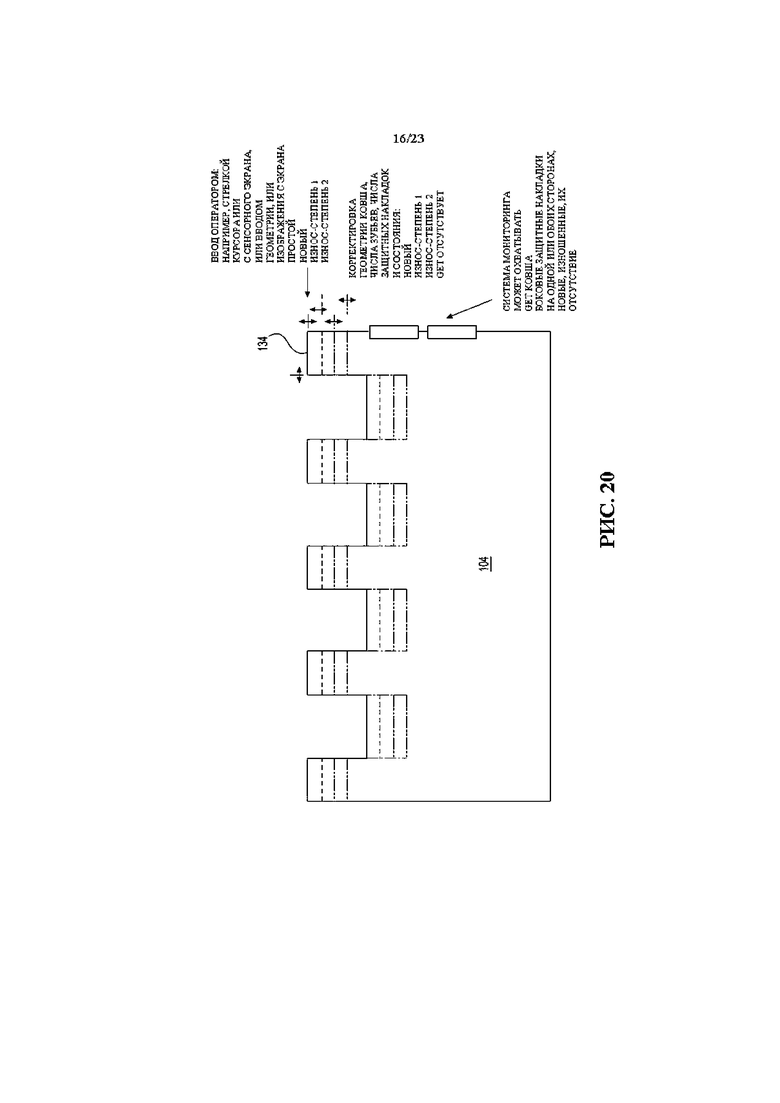
На рис. 20 представлен ввод оператором с помощью сенсорного экрана, стрелки курсора, управляемой мышью, и т.д., геометрии рабочего орудия, например, ковша и его различных орудий для земляных работ, а также различные степени износа, при которых оператор или система могут получать предупреждения.
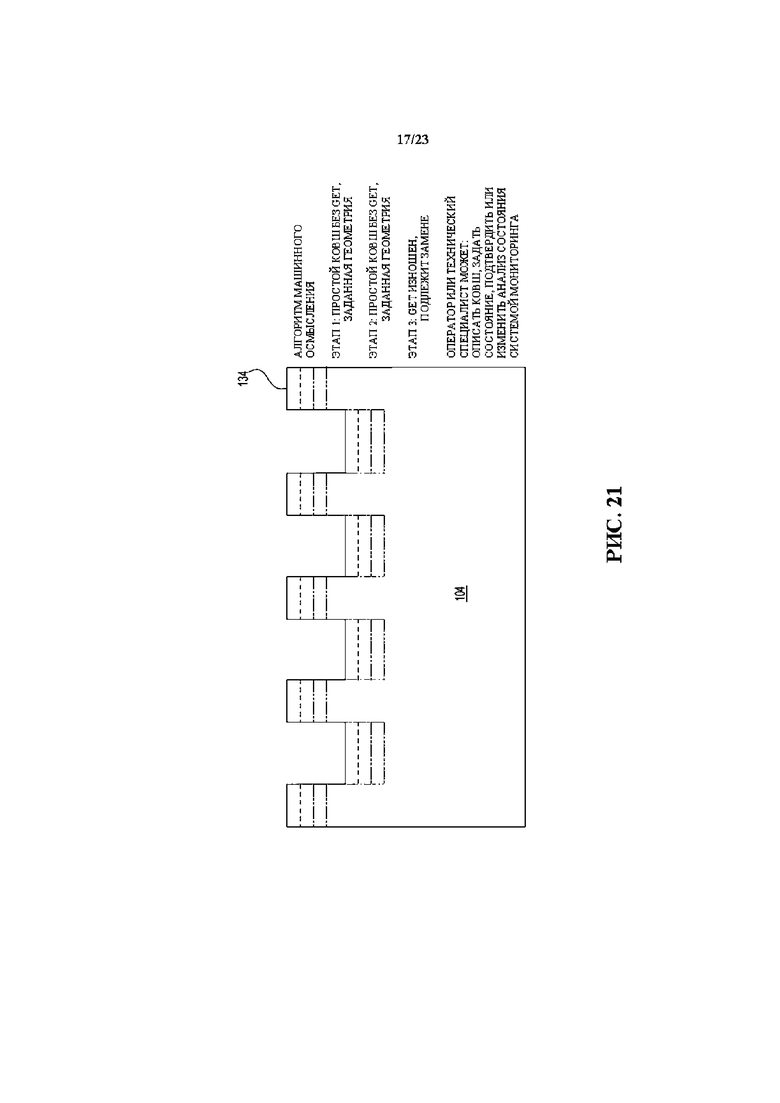
На рис. 21 показано, как алгоритм машинного осмысления может использоваться с различными вариантами осуществления системы мониторинга рабочего орудия для определения точной геометрии рабочего орудия, например, ковша, ковша с новыми прикрепленными орудиями для земляных работ и ковша с изношенным орудиями для земляных работ, предназначенными для замены.
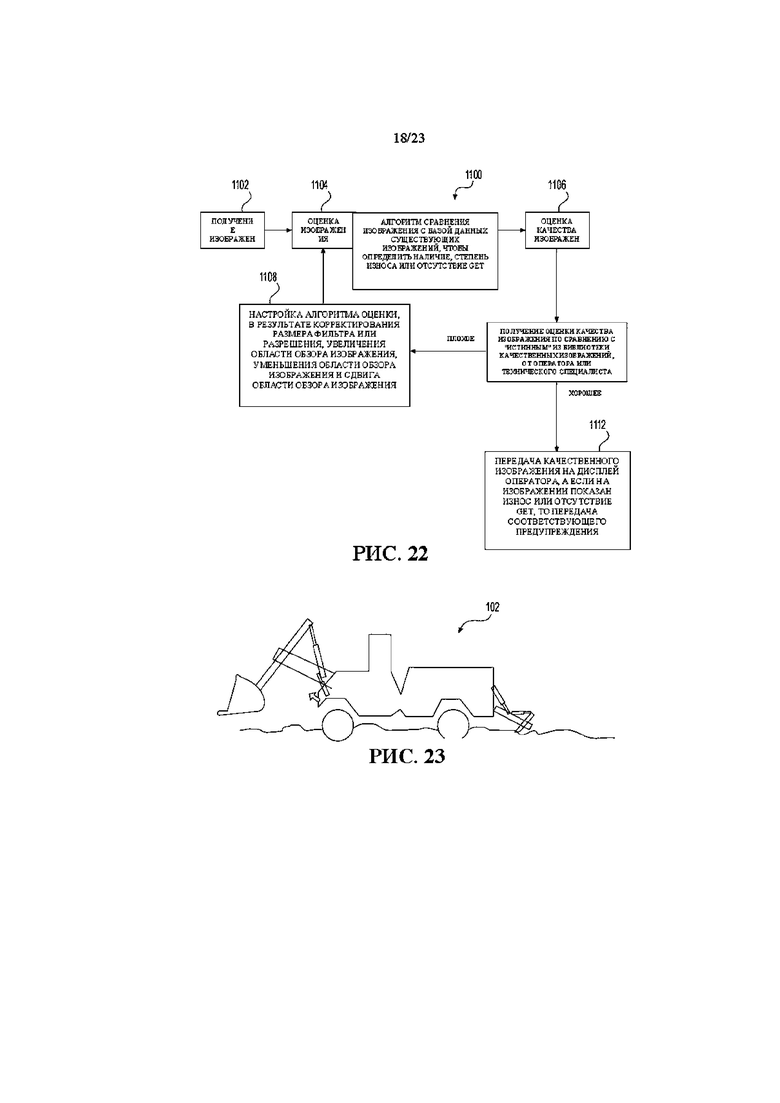
На рис. 22 представлена блок-схема другого варианта осуществления способа мониторинга состояния орудия для земляных работ, в котором данные, отправленные датчиком, например, изображения, снятые камерой, могут быть ранжированы по качеству.
На рис. 23 представлено изображение машины, например, экскаватора с обратной лопатой или т.п., которая содержит другие типы рабочих орудий, включая рыхлитель или культиватор и т.п., с находящимся в земле орудием для земляных работ.
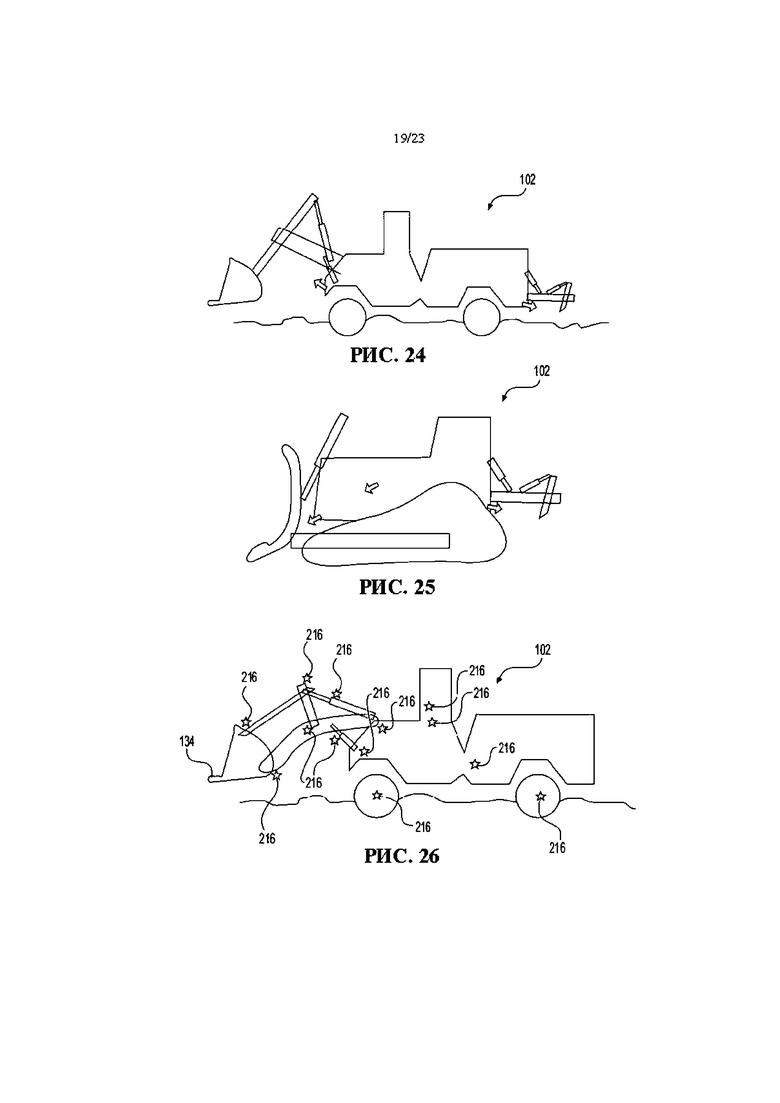
На рис. 24 представлена машина, изображенная на рис. 23, за исключением того, что орудие для земляных работ поднято таким образом, что орудие для земляных работ больше не находится в земле, что позволяет легче контролировать состояние орудия для земляных работ.
На рис. 25 представлено изображение бульдозера с отвалом, имеющим орудия для земляных работ, мониторинг которых осуществляется с использованием различных систем и способов, раскрытых в данном документе.
На рис. 26 показано, как различные варианты осуществления машины, например, экскаватора с обратной лопатой, могут включать в себя датчики рычажных механизмов для предоставления данных для использования в различных вариантах осуществления системы мониторинга орудия для земляных работ и способов, раскрытых в данном документе.
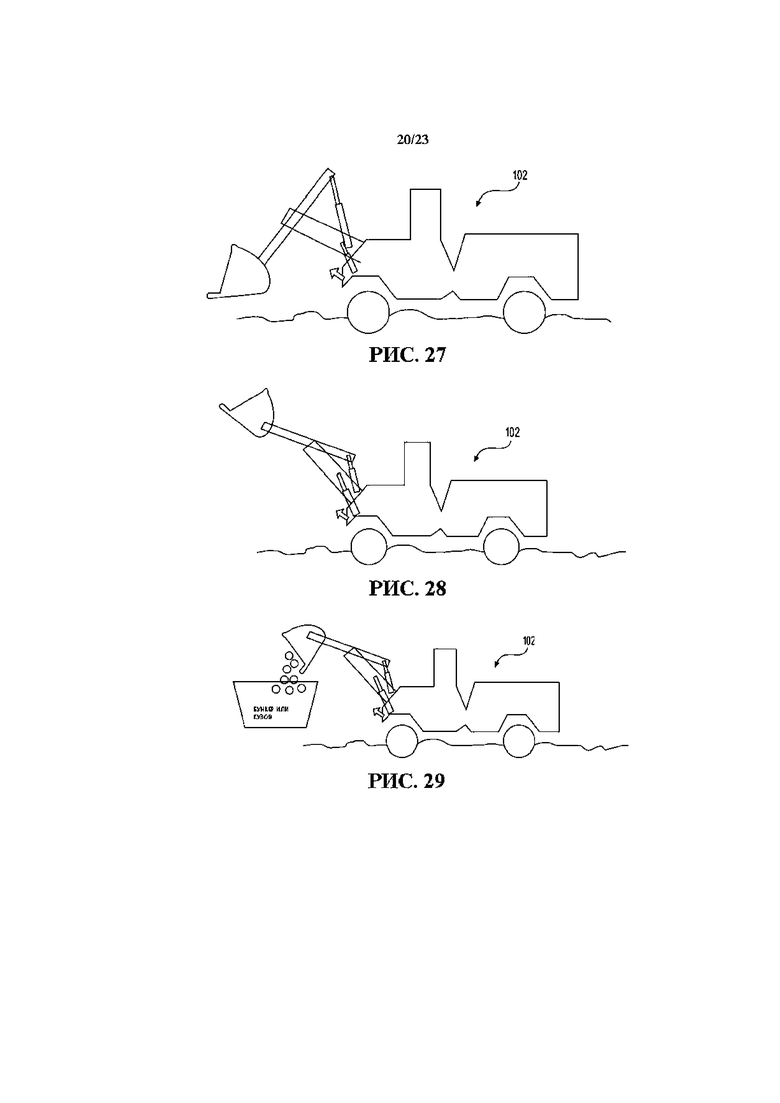
На рис. 27 приведен пример, где датчик, рабочее орудие, например, ковш, и рычажные механизмы, управляющие перемещением ковша, расположены по уровню или горизонтально. В таком случае датчик, например, камера, может пропускать изображение рабочего орудия и орудия для земляных работ для ранжирования изображения по качеству.
На рис. 28 приведен пример, где датчик, рабочее орудие, например, ковш, и рычажные механизмы, управляющие перемещением ковша, находятся в поднятом состоянии. В таком случае датчик, например, камера, может пропускать изображение рабочего орудия и орудия для земляных работ для ранжирования изображения по качеству.
На рис. 29 приведен пример, где датчик, рабочее орудие, например, ковш, и рычажные механизмы, управляющие перемещением ковша, находятся в приподнятом опрокидывающем движении. В таком случае датчик, например, камера, может пропускать изображение рабочего орудия и орудия для земляных работ для ранжирования изображения по качеству.
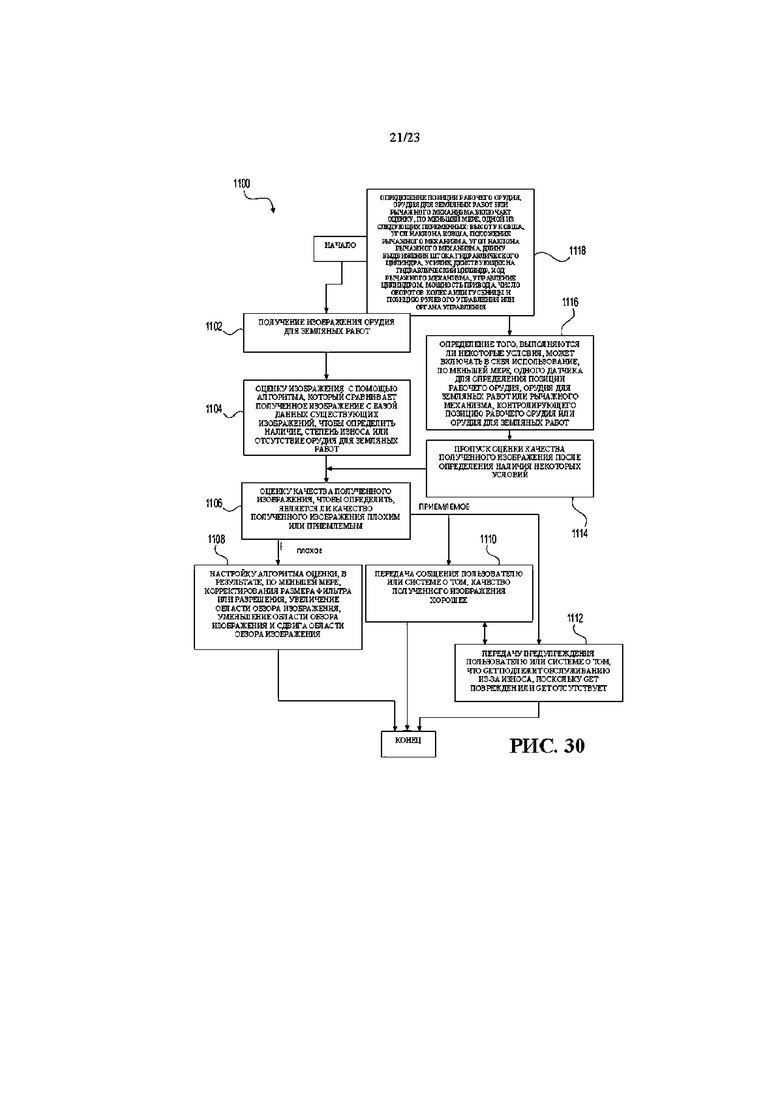
На рис. 30 представлена блок-схема, изображающая способ использования системы мониторинга GET в соответствии с другим вариантом осуществления в соответствии с настоящим изобретением.
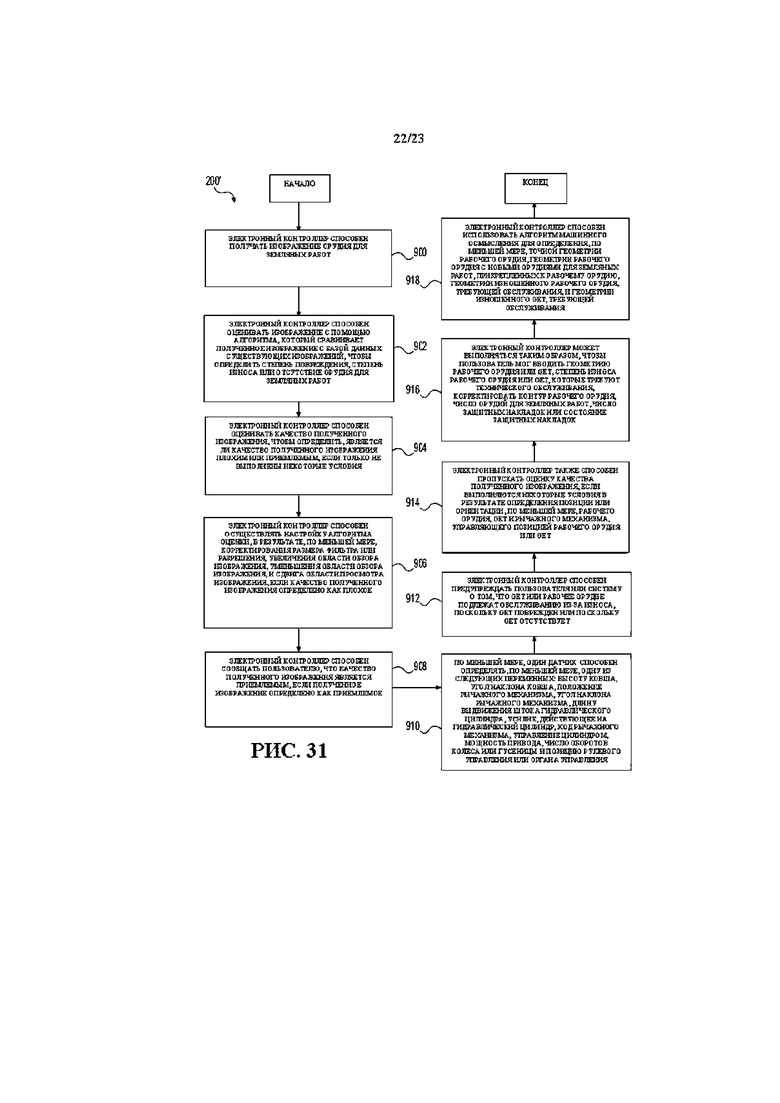
На рис. 31 представлена блок-схема, изображающая процесс конфигурации электронного контроллера системы мониторинга GET, изображенного на рис. 14.
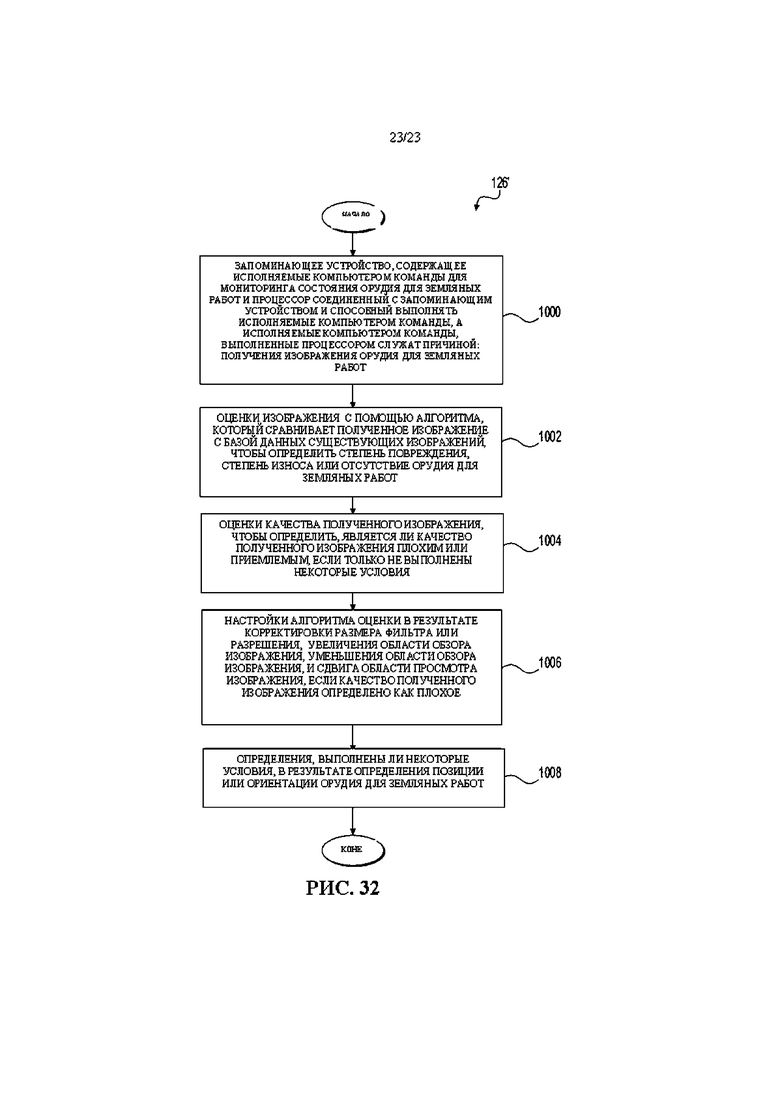
На рис. 32 представлена блок-схема, изображающая процесс выполнения процессором набора исполняемых компьютером команд, которые могут использоваться системой мониторинга GET, изображенной на рис. 14.
Подробное описание изобретения
Ниже приводится подробное описание примерных вариантов осуществления изобретения со ссылкой на прилагаемые рисунки. По мере возможности на всех рисунках будут использоваться одинаковые номера позиций для обозначения тех же или похожих деталей. В некоторых случаях в этом описании будет указываться номер позиции, а на рисунках также будет отображаться номер позиции, за которым следует буква, например, 100a, 100b или апостроф, например, 100’, 100’’ и т.д. Следует понимать, что использование букв или апострофов сразу после номера позиции указывает на то, что эти механизмы имеют одинаковую форму и обладают аналогичной функцией, как это часто бывает при зеркальном отображении геометрической фигуры в плоскости симметрии. Для удобства объяснения, буквы или апострофы часто не будут включаться в настоящее описание, но могут отображаться на рисунках, чтобы указать на параллелизм механизмов, имеющих схожие или идентичные функции или геометрическую фигуру, и обсуждаемых в этом документе.
Предлагается способ осуществления и описание: системы мониторинга орудия для земляных работ (GET); самой системы мониторинга GET; и электронного контроллера, выполненного для реализации способа, или его использования с системой мониторинга GET.
На рис. 1 представлена система 200 мониторинга GET, использующая устройство 100, в соответствии с вариантом осуществления настоящего изобретения. Устройство 100 содержит машину 102 и рабочее орудие 104 в примерной рабочей среде. Следует понимать, что система 200 обзора рабочего орудия может включать в себя или использоваться со множеством машин (например, бульдозерами, экскаваторами с обратной лопатой, гидравлическими карьерными экскаваторами, колесными погрузчиками, экскаваторами с электрическим приводом и т.д.) и с множеством разных рабочих орудий (например, ковшами, рейками для выравнивания асфальта, рычажными ножницами, отвалами, рыхлителями, катками, измельчителями, уплотнителями с шипами, коронками башмака гусеницы, культиваторами и т.д.), а машина 102 (например, HMS-FS 102’) и рабочее орудие 104 (например, ковш 104’), изображенный на рис. 1 приведены только в качестве примера, и не ограничивают объем настоящего изобретения. Кроме того, система 200 обзора рабочего орудия может включать дополнительные узлы, включая, не ограничиваясь, базовую станцию, соединенную с машиной 102, спутниковую систему, соединенную с машиной 102, беспилотный летательный аппарат, соединенный с машиной 102, и тому подобное, чтобы способствовать распознаванию и мониторингу состояния орудия для земляных работ 134.
Машина 102 может представлять собой подвижную машину или стационарную машину, имеющей подвижные части. В контексте данного документа, термин «подвижный» может относиться к перемещению машины 102 или ее части вдоль линейной декартовой системы координат и/или вдоль угловой, цилиндрической или винтовой системы координат и/или их комбинаций. Такое перемещение машины 102 может быть непрерывным или дискретным во времени. Например, машина 102 и/или часть машины 102 может совершать линейное движение, угловое движение или оба движения вместе. Такое линейное и угловое движение может представлять собой ускорение, вращение вокруг оси или оба движения вместе. Только как пример, а не в качестве ограничения, машина 102 может представлять собой экскаватор с обратной лопатой, экскаватор, бетоноукладчик, бульдозер, универсальный фронтальный погрузчик (SSL), погрузчик повышенной проходимости (MTL), компактный гусеничный погрузчик (CTL), компактный колесный погрузчик (CWL), комбайн, косилку, бур, молот, корабль, лодку, локомотив, автомобиль, трактор, гидравлический карьерный экскаватор, канатный экскаватор с электрическим приводом или другую машину, к которой прикрепляется рабочее орудие 104.
В контексте данного документа термин «орудие для земляных работ» следует толковать широко и он охватывает: коронки, зубья, защиты или защитные накладки и т.д.
В примере, показанном на рис. 1, машина 102 представляет собой HMS-FS 102’ и содержит узел 108 машины (например, стрелу 108’, рукоять 108’’), датчик 110, кабину 112 оператора и ходовую часть 114, включая гусеницы 116. Стрела 108’ и рукоять 108’’ прикреплены к рабочему орудию 104 и образуют шарнирное соединение 106, таким образом, что рабочее орудие 104 может перемещаться вверх и вниз. Кабина 112 оператора, как лучше всего видно на рис. 2, содержит, помимо других узлов, устройство 132 вывода. На рис. 3 показано, что устройство 132 вывода может представлять собой монитор 132’, который показывает оператору один или несколько орудий для земляных работ 134. Кабина 112 оператора может иметь размеры, подходящие для размещения водителя. Кроме того, машиной 102 можно управлять дистанционно с базовой станции, и в этом случае кабина 112 оператора может быть уменьшена в размерах. Также может быть предусмотрена система 124 рулевого управления (схематично показана на рис. 14), которая может иметь руль или джойстик, или другой механизм управления для управления движением машины 102 или ее частей. Кроме того, кабина 112 оператора может содержать рычаги управления, ручки, ручки настройки, дисплеи, световые индикаторы, аварийную сигнализацию и т.д., для облегчения эксплуатации машины 102. Рычаги, ручки и ручки настройки могут представлять собой примеры устройств ввода, в то время как дисплеи, световые индикаторы и аварийная сигнализация могут представлять собой примеры устройств вывода, как будет описано ниже в данном документе.
Как показано на рис. 14, машина 102 содержит электронный контроллер 126 и систему 130 управления машиной. Машина 102 может содержать другие узлы, например, системы силовой передачи, силовую установку (и), двигатели, систему (ы) питания, гидравлическую систему (ы), системы подвески, системы охлаждения, топливные системы, выхлопные системы, распорные системы, двигательные установки, системы коммуникации, включая антенны, системы глобального позиционирования (GPS) и т.п. (не показано), которые соединены с системой 130 управления машиной.
В соответствии с рис. 1, узел 108 машины может представлять собой стрелу 108’, содержащую гидроцилиндры и механические рычажные механизмы, а множество несколько датчиков 110 устанавливают на стреле 108’ рядом с шарнирным соединением 106 (или устанавливают на рукояти 108’’ и т.д.). Узел 108 машины может быть телескопическим, складным, сжимаемым, вращаемым и перемещаемым в радиальном или осевом направлении или иным образом перемещаемым машиной 102 для перемещения рабочего орудия 104. Например, высоту и наклон узла 108 машины можно менять для облегчения подъема и опускания рабочего орудия 104. Узел 108 машины может выполняться для получения требуемой мощности от машины 102 для выполнения различных операций (например, раскапывания земли) на примерном месте производства работ с использованием рабочего орудия 104.
В одном варианте осуществления данного изобретения, несколько датчиков 110 могут представлять собой несколько камер 110’. Только как пример, а не в качестве ограничения, датчик 110 может представлять собой монокулярную камеру, стереокамеру, инфракрасную камеру, камеру высокого разрешения, матрицу из одного или нескольких типов камер, оптико-акустический датчик, радар, датчик изображения на основе лазера и т.п., или их комбинации, выполненные для помощи в распознавании и мониторинге орудия для земляных работ 134. В случае использования камеры, также предусматривается подсветка для этой камеры. Другими примерами датчика являются камеры, использующие естественное освещение, например, камеры 2D или 3D измерительного типа, камеры со встроенной функцией обработки изображения, камеры со средней разрешающей способностью и камеры со стандартной разрешающей способностью. Датчик (и) выбирают таким образом, чтобы можно было осуществлять эффективный мониторинг всех параметров ковша большого размера с орудием для земляных работ, исходя из изображения с достаточным количеством пикселей и достаточно малым разрешением, чтобы различать небольшие изменения размера для любого узла или части рабочего орудия или соответствующего GET (доли дюйма). Другими словами, любой вариант осуществления системы, обсуждаемой в данном документе, может иметь повышенную точность по сравнению с предшествующими системами. Рабочее орудие 104 можно крепить к машине 102, например, к рычажному механизму на торцевой части узла 108 машины (например, рукояти 108’’) с помощью соединительной муфты (не показано). Только как пример, а не в качестве ограничения, рабочее орудие 104 может представлять собой ковш 104’для перемещения грунта (как показано на рис. 1), вилы для подъема поддонов (не показано), комбайн, бурильную головку, молот, каток или любой другой тип рабочего орудия, присоединяемого к машине 102. В этом отношении машина 102 может выполняться способной соединяться не только к одному типу рабочего орудия 104, но также и к различным типам рабочих орудия 104, а также одновременно к нескольким рабочим орудиям, орудиям для земляных работ 134, различным типам орудий для земляных работ 134 и т.д.
Как показано на рис. 1, в зависимости от типа используемого рабочего орудия 104 машина 102 может выполняться способной функционировать в режиме выдвижения, характерном для типа рабочего орудия 104. Режим выдвижения машины 102 определяется соответствующими электрическими и механическими параметрами функционирования рабочего орудия 104, после прикрепления к узлу 108 машины. Например, режим выдвижения ковша отличается от режима выдвижения вил с точки зрения выходной мощности, подаваемой на рабочее орудие 104. Если режим выдвижения выбран неправильно или режим выдвижения не выбран оператором вручную, после присоединения рабочего орудия 104 к узлу 108 машины, то машина 102 не сможет правильно выполнять или не выполнять операцию, для которой была развернута машина 102.
Кроме того, в зависимости от типа рабочего орудия 104, соединительная муфта может представлять собой фиксатор навесного орудия, защелку, крюк, карданный шарнир или другие типы узлов крепления, которые позволяют прикреплять рабочее орудие 104 к узлу 108 машины 102. В одном аспекте, рабочее орудие 104 может быть неподвижным. В другом аспекте, рабочее орудие 104 может быть подвижным или смещаемым по направлению к машине 102. Например, другая машина (не показано) может использоваться для толкания рабочего орудия 104 в соответствии с движением машины 102 и/или узла 108 машины. Кроме того, как будет более подробно объяснено ниже в данном документе, в результате использования на устройстве 136 ввода (см. рис. 2) элементов управления, которые могут иметь форму кнопок, HMI (человеко-машинный интерфейс) или GUI (графический пользовательский интерфейс) и т.д., тип используемого рабочего орудия можно выбирать путем изменения системы 200 мониторинга GET в зависимости от того, где и как осуществлять обзор при мониторинге состояния орудие для земляных работ 134.
В некоторых вариантах осуществления настоящего изобретения, как показано на рис. 14, система 130 управления машиной может содержать различные гидравлические и электрические системы питания, управляемые электронным контроллером 126 на основе выходных сигналов от электронного контроллера 126, подаваемых в систему 130 управления машиной. Система 130 управления машиной может содержать или быть соединенной с системой 124 рулевого управления, способной управлять движением машины 102 и/или узлом 108 машины. В другом аспекте, система 130 управления машиной или ее часть может располагаться на расстоянии от машины 102, например, на базовой станции, физически отделенной от машины 102. В этом случае система 130 управления машиной может иметь прямой или непрямой канал связи с электронным контроллером 126 для управления машиной 102 для установки или перемещения рабочего орудия 104. В других вариантах осуществления может отсутствовать различная оперативная связь между системой управления машиной и системой рулевого управления.
Как показано на рис. 14, ниже будет обсуждаться система 200 мониторинга GET для мониторинга состояния орудия для земляных работ 134, установленного на рабочем орудии 104. Система 200 может содержать несколько датчиков 110, выполненных для измерения орудия для земляных работ 134, установленного на рабочем орудии 104, по меньшей мере, под двумя разными углами 202, 202’, и электронный контроллер 126, соединенный с несколькими датчиками 110. Электронный контроллер 126 выполняется способным определять размер 204 (см. также рис. 4-11) орудия для земляных работ, установленного на рабочем орудии 104, сравнивать определенный размер 204 орудия для земляных работ 134, установленного на рабочем орудии, с теоретическим размером 206 нового орудия для земляных работ 134, установленного на рабочем орудии 104, и рассчитывать отклонение между определенным размером 204 и теоретическим размером 206.
Кроме того, как показано на рис. 14 на блок-схеме системы 200 мониторинга GET, электронный контроллер 126 соединен с датчиками 110, системой 130 управления машиной, устройством 132 вывода, системой 124 рулевого управления и устройством 136 ввода, а также с другими узлами машины 102 (не показано).
Как показано на рис. 14, электронный контроллер (126) дополнительно способен хранить эталонные данные 208 нового орудия для земляных работ 134, установленного на рабочем орудии 104. Кроме того, электронный контроллер 126 может выполняться способным сравнивать отклонение между определенным размером 204 и теоретическим размером 206 с пороговым значением. Если отклонение ниже порогового значения, то электронный контроллер 126 управления может выполняться способным подавать предупреждение о том, что орудие для земляных работ 134 нуждается в обслуживании в течение некоторого промежутка времени, а если отклонение выше порогового значения, то тогда электронный контроллер 126 способен подавать предупреждения о том, что орудие для земляных работ 134 повреждено или отсутствует, что требует безотлагательного технического обслуживания.
Несколько датчиков 110 могут содержать, по меньшей мере, две камеры 110’, снимающие орудие для земляных работ 134, установленное на рабочем орудии 104, с двух разных точек 210 обзора.
Как показано на рис. 1, система 200 может дополнительно содержать HMS-FS 102’, включая стрелу и шарнирное соединение рукояти 106, и несколько камер 110’ устанавливаемых на верхней части стрелы и шарнирного соединения рукояти 106 и предназначенных для измерения относительного износа орудия для земляных работ 134 под разными углами 202, 202’ и предоставления оператору обратной связи при необходимости проведения технического обслуживания.
Как показано на рис. 2, 3 и 14, система 200 может дополнительно содержать устройство 132 вывода, которое соединено с электронным контроллером 126. Электронный контроллер 126 выполняется способным отправлять сигнал на устройство 132 вывода, на котором отображается изображение орудия для земляных работ 134, установленного на рабочем орудии 104.
Электронный контроллер (126) дополнительно способен хранить базу 212 эталонных данных 208 для различных орудий для земляных работ 134 и сравнения определенных размеров 204 различных орудий для земляных работ с одним или несколькими эталонными данными 208.
Как более подробно показано на рис. 1 и 14, несколько камер 110’ размещают на фиксированном расстоянии 214 от нескольких орудий для земляных работ 134, создавая несколько точек 210 обзора отдельных орудий для земляных работ 134 и предоставляя электронному контроллеру 126 достаточную 3D информацию для определения относительного износа между отдельными орудиями для земляных работ 134.
Как показано на рис. 1 и 12, по меньшей мере, две камеры 110’ выполняются способными вести наблюдение за нижней частью рабочего орудия 104 и несколькими орудиями для земляных работ 134. Как показано на рис. 13 и 14, электронный контроллер 126 выполняется способным отслеживать кинематическую границу 218 действия орудия для земляных работ 134 для облегчения анализа посторонних изображений или для анализа, сделаны ли изображения днем, ночью, когда идет снег, когда идет дождь, когда есть грязь, когда есть лед, или когда рабочее орудие 104 перемещается.
Как показано на рис. 14, электронный контроллер 126 содержит порт 504 ввода-вывода, процессор 506 и запоминающее устройство 508, соединенные друг с другом, например, внутренней шиной (не показано). Электронный контроллер 126 может содержать дополнительные узлы, известные любому специалисту в данной области техники, которые явно не показаны на рис. 14. Например, электронный контроллер 126 может содержать программируемую логическую схему (PLC), схему таймера/ синхронизации, радиаторы, визуальные индикаторы (например, светоизлучающие диоды), схему согласования импеданса, внутренние шины, сопроцессоры или процессоры монитора, батареи и блоки питания, микросхемы контроллера мощности, трансиверы, беспроводные модули, модули обработки спутниковой связи и встроенные системы на различных интегрированных микросхемах. В одном варианте осуществления, электронный контроллер 126 может быть отделен от блока управления двигателем (не показано). В альтернативном варианте осуществления, электронный контроллер 126 может быть интегрирован в блок управления двигателем или может совместно использовать пространство и ресурсы обработки.
Порт 504 ввода-вывода может представлять собой один порт или набор портов. Порт 504 ввода-вывода выполнен для передачи и приема различных входных сигналов и данных от других частей машины 102 и пересылки таких входных сигналов и данных в процессор 506. В одном аспекте, порт 504 ввода-вывода может представлять собой два отдельных порта, один из которых выполнен для приема различных входных сигналов от различных частей машины 102 (например, датчика 110 и т.д.), а другой выполнен для вывода сигналов на дисплей (например, на устройство 132 вывода) или для управления машиной 102 (например, в систему 130 управления машиной). В соответствии с другим вариантом, функции ввода и вывода могут осуществляться одним портом, показанным как порт 504 ввода-вывода на рис. 14.
В одном аспекте, процессор 506 представляет собой аппаратное устройство, например, чип с интегральными схемами (ИС), изготовленная для реализации различных особенностей и функций вариантов осуществления, обсуждаемых в данном документе. Только как пример, а не в качестве ограничения, процессор 506 может быть изготовлен с использованием технологии комплементарной структуры металл-оксид-полупроводник (CMOS). В одном варианте осуществления, процессор 506 выполняется в виде заказной специализированной интегральной схемы (ASIC), логической микросхемы, программируемой в условиях эксплуатации (FPGA), однокристальной системы (SOC) и тому подобное. В другом варианте осуществления процессор 506 может содержать узлы, например: корпус, контакты ввода и вывода, радиаторы, схемы преобразования сигналов, устройства ввода, устройства вывода, компоненты памяти процессора, системы охлаждения, системы питания и т.п., которые не показаны на рис. 14. В одном конкретном варианте осуществления, процессор 506 сконфигурирован для выполнения различных этапов способа 800, показанного на рис. 15, путем выполнения исполняемых компьютером команд 510, хранящихся в запоминающем устройстве 508. В еще одном варианте осуществления, процессор 506 может состоять из нескольких процессоров, скомпонованных, например, в виде матричного процессора.
Запоминающее устройство 508 может быть выполнено как энергонезависимый машиночитаемый носитель. Только как пример, запоминающее устройство 508 может представлять собой запоминающее устройство на основе полупроводников, включая, не ограничиваясь, оперативное запоминающее устройство (RAM), постоянное запоминающее устройство (ROM), динамическое RAM, программируемое ROM, электрически стираемое программируемое ROM (EEPROM), статическую память RAM, флэш-память и их комбинации или другие типы запоминающих устройств, известные специалисту в данной области техники. В одном варианте осуществления, запоминающее устройство 508 соединяется с процессором 506 напрямую через коммуникационную и сигнальную шину. В одном варианте осуществления, запоминающее устройство 508 может изготавливаться или выполняться с использованием энергонезависимого машиночитаемого носителя данных, на котором находятся исполняемые компьютером команды 510. Исполняемые компьютером команды 510, выполненные процессором 506, служат причиной выполнения процессором 506 событий и функций различных аспектов данного изобретения. Такой энергонезависимый машиночитаемый носитель данных может содержать: запоминающее устройство на основе полупроводников, оптическое запоминающее устройство, магнитное запоминающее устройство, моно- или бистабильные схемы (триггеры и т.д.) и т.п. или их комбинации. Такой энергонезависимый машиночитаемый носитель данных исключает неустойчивые сигналы.
Исполняемые компьютером команды 510 могут выполняться процессором 506 с использованием высокоуровневых или низкоуровневых компиляторов и языков программирования (например, C ++). В одном варианте осуществления, исполняемые компьютером команды 510 могут выполняться базовой станцией дистанционно, а результаты такого выполнения предоставляться процессору 506 для управления системой обзора рабочего орудия. В этом отношении следует понимать, что конкретное расположение исполняемых компьютером команд 510 внутри запоминающего устройства 508 является только примером, а не ограничением.
В некоторых вариантах осуществления, запоминающее устройство 508 содержит базу данных 212 или соединено с ней. База данных 212 может содержать изображения различных орудий для земляных работ 134. Такие изображения хранятся в базе данных 212 как библиотека файлов изображений и компьютеризированных моделей. Такие модели или эталонные изображения могут представлять собой трехмерные и двухмерные виды различных орудий для земляных работ 134, присоединяемых к машине 102. Каждое такое изображение или модель в базе данных 212 может содержать один или несколько размеров, связанных с орудием для земляных работ и/или рабочим орудием, включая расстояние, на которое орудие для земляных работ простирается от рабочего орудия, ширину орудия для земляных работ, высоту орудия для земляных работ и т.д.
Следует понимать, что трехмерные и двумерные виды, снятые камерой, представляют собой два визуальных примера работы машины 102, выводимые на устройство 132 вывода, а устройство 132 вывода способно непрерывно покадрово отображать множество трехмерных изображений мест работы, как это осуществляется процессором 506 в устройстве 132 вывода, на основе входных сигналов (включая входной сигнал 518) от датчика 110, измененных в ходе обработки процессором. В одном аспекте, изображения могут выводиться на дисплей удаленного оператора машины 102 на удаленной базовой станции (не показано) в реальном времени в виде видео места работы, где машина 102 и рабочее орудие 104 находятся в развернутом состоянии. Такое покадровое представление рабочего места машины 102 используется для распознавания и отслеживания движения или состояния орудия для земляных работ 134. В других вариантах осуществления, устройство 132 вывода может размещаться в кабине 112 машины 102, как представлено на РИС. 1, где оператор может непосредственно видеть состояние орудия для земляных работ.
В соответствии с рис. 14 и как показано на рис. 31, будет обсуждаться другой вариант осуществления системы 200’ мониторинга GET для мониторинга состояния орудия для земляных работ 134, установленного на рабочем орудии 104. Система 200’ может содержать, по меньшей мере, один датчик 216, способный отслеживать положение или ориентацию рабочего орудия 104 или орудия для земляных работ 134 (см. также рис. 26), и электронный контроллер 126’, соединенный, по меньшей мере, с одним датчиком 216.
Электронный контроллер 126’ выполняется способным получать изображение орудия для земляных работ 134 (см. блок 900 на рис. 31), оценивать изображение с помощью алгоритма, который сравнивает полученное изображение с базой данных существующих изображений, чтобы определить степень повреждения, степень износа или отсутствие орудия для земляных работ 134 (см. блок 902 на рис. 31), и оценивать качество полученного изображения, чтобы определить, является ли качество полученного изображения плохим или приемлемым, если только не выполнены некоторые условия (см. блок 904 на рис. 31). Электронный контроллер 126’ может дополнительно выполняться способным осуществлять настройку алгоритма оценки, в результате, по меньшей мере, корректирования размера фильтра или разрешения, увеличения области обзора изображения, уменьшения области обзора изображения, и сдвига области просмотра изображения, если качество полученного изображения определено как плохое (см. блок 906 на рис. 31).
Как показано на рис. 31, электронный контроллер 126’ может выполняться таким образом, чтобы сообщать пользователю, что качество полученного изображения является приемлемым, если полученное изображение определено как приемлемое (см. блок 908). Это может выполняться устройством 131 вывода, как обсуждалось в этом документе ранее.
По меньшей мере, один датчик 216 может выполняться способным определять, по меньшей мере, одну из следующих переменных: высоту ковша, угол наклона ковша, положение рычажного механизма, угол наклона рычажного механизма, длину выдвижения штока гидравлического цилиндра, усилие, действующее на гидравлический цилиндр, ход рычажного механизма, управление цилиндром, мощность привода, число оборотов колеса или гусеницы и позицию рулевого управления или органа управления (см. блок 910).
Электронный контроллер может выполняться таким образом, чтобы предупреждать пользователя или систему о том, что GET или рабочее орудие подлежат обслуживанию из-за износа, поскольку GET поврежден или поскольку GET отсутствует (см. блок 912).
Электронный контроллер также может выполняться таким образом, чтобы пропускать оценку качества полученного изображения, если выполняются некоторые условия в результате определения позиции или ориентации, по меньшей мере, рабочего орудия, GET и рычажного механизма, управляющего позицией рабочего орудия или GET (см. блок 914).
Система 200 мониторинга GET может дополнительно содержать устройство 136 ввода, соединенное с электронным контроллером 126’, а электронный контроллер 126’ может выполняться таким образом, чтобы пользователь мог вводить геометрию рабочего орудия или GET, степень износа рабочего орудия или GET, которые требуют технического обслуживания, корректировать контур рабочего орудия, число орудий для земляных работ, число защитных накладок или состояние защитных накладок (см. блок 916, также см. рис. 20).
Электронный контроллер может использовать алгоритм машинного осмысления для определения, по меньшей мере, точной геометрии рабочего орудия, геометрии рабочего орудия с новыми орудиями для земляных работ, прикрепленных к рабочему орудию, геометрии изношенного рабочего орудия, требующей обслуживания, и геометрии изношенного GET, требующей обслуживания (см. блок 918 на рис. 31, см. также рис. 21).
Промышленная применимость
На практике система мониторинга GET, электронный контроллер или способ, согласно любому варианту осуществления, описанному, показанному или обсуждаемому в данном документе, могут быть проданы, куплены, изготовлены, восстановлены, модернизированы, собраны или иным образом получены на вторичном рынке или от OEM. Точно так же машина, использующая такую систему мониторинга GET, электронный контроллер или способ, согласно любому варианту осуществления, описанному в данном документе, может предлагаться новой или модернизированной любым из этих вариантов осуществления.
В соответствии с рис. 14 и как показано на рис. 16, предлагается система 200 мониторинга GET для мониторинга движения и состояния орудия для земляных работ 134. Система 200 может содержать несколько датчиков 110, выполненных для измерения орудия для земляных работ 134, установленного на рабочем орудии 104, по меньшей мере, под двумя разными углами 202, 202’, и электронный контроллер 126, соединенный с несколькими датчиками 110.
Электронный контроллер 126 выполняется способным:
определять размер орудия для земляных работ, установленного на рабочем орудии (Смотри рис. 16, (блок 600);
сравнивать определенный размер орудия для земляных работ, установленного на рабочем орудии, с теоретическим размером нового орудия для земляных работ, установленного на рабочем орудии (блок 602); и
рассчитывать отклонение между определенным размером и теоретическим размером (блок 604).
В дополнительных вариантах осуществления, электронный контроллер 126 дополнительно способен хранить эталонные данные 208 нового орудия для земляных работ 134, установленного на рабочем орудии 204 (блок 606). В этом случае, электронный контроллер 126 выполняется способным хранить базу эталонных данных для различных орудий для земляных работ 134 и сравнивать определенные размеры различных орудий для земляных работ с одним или несколькими эталонными данными (блок 608).
В некоторых вариантах осуществления, электронный контроллер 126 выполняется способным сравнивать отклонения между определенным размером 204 и теоретическим размером 206 с пороговым значением, а если отклонение ниже порогового значения, то тогда электронный контроллер 126 способен подавать предупреждение о том, что орудие для земляных работ 134 нуждается в обслуживании, а если отклонение выше порогового значения, то тогда электронный контроллер 126 способен подавать предупреждения о том, что орудие для земляных работ 134 повреждено или отсутствует, что требует безотлагательного технического обслуживания (блок 610). Второе пороговое значение может быть ниже первого порогового значения. В таком случае, если отклонение ниже, чем второе пороговое значение, то предупреждение не может подается.
В других дополнительных вариантах осуществления, устройство вывода 132, которое может быть соединено с электронным контроллером 126, а электронный контроллер 126 дополнительно способен отправлять сигнал на устройство 132 вывода, на котором отображается изображение орудия для земляных работ 134, установленного на рабочем орудии 204 (блок 612).
В некоторых дополнительных вариантах осуществления, электронный контроллер 126 выполняется способным отслеживать кинематическую границу 218 действия орудия для земляных работ 134 для облегчения анализа посторонних изображений или для анализа, сделаны ли изображения днем, ночью, когда идет снег, когда идет дождь, когда есть грязь, когда есть лед, или когда рабочее орудие 204 перемещается (блок 614).
В некоторых вариантах осуществления, как показано на рис. 14 и рис. 17, электронный контроллер (126) машины (102) может содержать:
запоминающее устройство 508, содержащее исполняемые компьютером команды 510 для распознавания орудия для земляных работ 134; и
процессор 506, соединенный с запоминающим устройством 508 и способный выполнять исполняемые компьютером команды 510, а исполняемые компьютером команды 510, выполненные процессором 506, служат причиной определения процессором 506:
определять размер орудия для земляных работ, установленного на рабочем орудии (смотри рис. 17, (блок 700);
сравнения определенного размера орудия для земляных работ, установленного на рабочем орудии, с теоретическим размером нового орудия для земляных работ, установленного на рабочем орудии (блок 702); и
расчета отклонения между определенным размером и теоретическим размером (блок 704).
Запоминающее устройство 508 может хранить в себе пороговое значение, соответствующее определенному размеру 204 орудия для земляных работ 134, а процессор 506 способен сравнивать отклонение между пороговым значением и рассчитанным отклонением между определенным измерением заранее заданного размера и теоретическим размером 206, и отправлять предупреждения исходя из того, является ли рассчитанное отклонение меньше или больше порогового значения (блок 706).
Еще один вариант осуществления настоящего изобретения для электронного контроллера 126’ теперь будет обсуждаться со ссылкой на рис. 14 и 32. Электронный контроллер 126’ может содержать запоминающее устройство 508, содержащее исполняемые компьютером команды 510 для мониторинга состояния орудия для земляных работ (134), и процессор 506, соединенный с запоминающим устройством 508 и способный выполнять исполняемые компьютером команды 510, а исполняемые компьютером команды 510, выполненные процессором 506, служат причиной получения процессором 506:
изображения орудия для земляных работ (см. блок 1000 на рис. 32);
оценки изображения с помощью алгоритма, который сравнивает полученное изображение с базой данных существующих изображений, чтобы определить степень повреждения, степень износа или отсутствие орудия для земляных работ (см. блок 1002); и
оценки качества полученного изображения, чтобы определить, является ли качество полученного изображения плохим или приемлемым, если только не выполнены некоторые условия (см. блок 1004).
Кроме того, исполняемые компьютером команды 510, выполненные процессором 506 служат причиной настройки процессором 506: алгоритма оценки в результате корректировки размера фильтра или разрешения, увеличения области обзора изображения, уменьшения области обзора изображения, и сдвига области просмотра изображения, если качество полученного изображения определено как плохое (см. блок 1006).
В некоторых вариантах осуществления, исполняемые компьютером команды, выполненные данным способом, служат причиной определения процессором выполнения некоторых условий, в результате определения позиции или ориентации орудия для земляных работ (см. блок 1008).
На рис. 15, представлен способ 800 мониторинга состояния орудия для земляных работ. Способ 800 включает:
определение размера орудия для земляных работ, установленного на рабочем орудии, с использованием нескольких датчиков, принимающих сигналы от орудия для земляных работ под разными углами (этап 802);
сравнение определенного размера орудия для земляных работ, установленного на рабочем орудии, с теоретическим размером орудия для земляных работ (этап 804); и
расчет отклонения между определенным размером и теоретическим размером (этап 806).
В некоторых вариантах осуществления, теоретический размер определяют в результате сравнения изображения орудия для земляных работ с эталонным изображением нового орудия для земляных работ (этап 808).
В других вариантах осуществления, способ 800 может дополнительно включать сравнение отклонения между определенным размером и теоретическим размером с пороговым значением (этап 810).
Способ 800 может дополнительно включать создание предупреждения о том, что орудие для земляных работ нуждается в обслуживании, если отклонение ниже порогового значения (этап 812).
Кроме того, способ 800 может дополнительно включать создание предупреждения о том, что орудие для земляных работ нуждается в замене, если отклонение выше порогового значения (этап 814).
Способ 800 может дополнительно включать отслеживание кинематической границы действия орудия для земляных работ для облегчения анализа посторонних изображений (этап 816).
Способ 800, дополнительно включающий определение, сделаны ли изображения днем или ночью (этап 818).
Кроме того, способ 800 дополнительно включает определение, сделаны ли изображения в ненастную погоду (этап 820).
В дополнительных вариантах осуществления способ 800 может дополнительно включать определение, сделаны ли изображения, когда орудие для земляных работ покрыто землей, грязью, песком или льдом и т.д. (этап 822).
Некоторые переменные выбирают в зависимости от сферы применения для получения требуемого результата для системы мониторинга GET. Например, величина износа для GET может измеряться в миллиметрах, могут выбираться некоторые характеристики камеры и ее расположение относительно орудия (й) для земляных работ, может выбираться расстояние от камеры до GET, может изменяться поле зрения камеры в зависимости от сферы применения (например, может требоваться широкое поле зрения), может устанавливаться требуемый % экрана, заполненный видом GET, может выбираться разрешение камеры и монитора, а также может изменяться зона охвата камерой ковша и т.д.
На рис. 22-30а также представлен способ 1100 в соответствии с другим вариантом осуществления настоящего изобретения.
Способ 1100 мониторинга состояния орудия для земляных работ, прикрепленного к рабочему орудию машины, с использующий систему мониторинга GET, может включать:
получение изображения орудия для земляных работ (этап 1102);
оценку изображения с помощью алгоритма, который сравнивает полученное изображение с базой данных существующих изображений, чтобы определить наличие, степень износа или отсутствие орудия для земляных работ (стадии 1104), и
оценку качества полученного изображения, чтобы определить, является ли качество полученного изображения плохим или приемлемым (этап 1106).
Качество полученного изображения может быть определено как плохое. В этом случае способ 1100 может дополнительно содержать настройку алгоритма оценки, в результате, по меньшей мере, корректирования размера фильтра или разрешения, увеличение области обзора изображения, уменьшение области обзора изображения и сдвига области обзора изображения (этап 1108).
В других случаях качество полученного изображения может быть определено как приемлемое. В этом случае способ 1100 может дополнительно включать передачу сообщения пользователю или системе о том, что качество полученного изображения приемлемо (этап 1110) и/или передачу предупреждения пользователю или системе о том, что GET подлежит обслуживанию из-за износа, поскольку GET поврежден или GET отсутствует (этап 1112).
В некоторых случаях способ 1100 может дополнительно включать пропуск оценки качества полученного изображения после определения наличия некоторых условий (этап 1114).
Например, определение того, выполняются ли некоторые условия, может включать в себя использование, по меньшей мере, одного датчика для определения позиции рабочего орудия, орудия для земляных работ или рычажного механизма, контролирующего позицию рабочего орудия или орудия для земляных работ (этап 1116). В частности, в некоторых случаях определение позиции рабочего орудия, орудия для земляных работ или рычажного механизма может включать в себя оценку, по меньшей мере, одной из следующих переменных: высоту ковша, угол наклона ковша, положение рычажного механизма, угол наклона рычажного механизма, длину выдвижения штока гидравлического цилиндра, усилие, действующее на гидравлический цилиндр, ход рычажного механизма, управление цилиндром, мощность привода, число оборотов колеса или гусеницы и позицию рулевого управления или органа управления (этап 1118).
Следует понимать, что приведенное выше описание содержит примеры раскрытой сборки и способа. Тем не менее, предполагается, что другие варианты реализации изобретения могут отличаться в деталях от вышеприведенных примеров. Все ссылки на раскрытие или примеры подразумевают ссылку на конкретный пример, обсуждаемый в этот момент, и не подразумевает каких-либо ограничений в отношении объема изобретения в более общем смысле. Все формулировки отличительных особенностей и пренебрежение некоторыми признаками предназначаются для указания на отсутствие предпочтения для данных признаков, а не для их полного исключения из объема изобретения, если не указано иное.
Перечисленные в данном документе диапазоны значений в целом предназначены для краткой справки при ссылке на каждое отдельное значение диапазона, если не указано иное, а каждое отдельное значение включено в технические характеристики, так, как если бы оно было указана в данном документе отдельно.
Специалистам в данной области техники очевидно, что согласно изобретению, могут быть сделаны различные модификации и варианты устройств и способов сборки без отклонения от сущности и объема настоящего изобретения. Другие варианты осуществления данного изобретения будут очевидны специалистам в данной области техники в результате рассмотрения спецификации и практики использования различных вариантов осуществления, раскрытых в данном документе. Например, некоторое оборудование конструируется и функционирует иначе, чем описанное здесь, а некоторые этапы любого способа могут пропускаться, выполняться в другом порядке, отличном от упомянутого, а в некоторых случаях выполняться одновременно или разбиваться на дополнительные стадии. Более того, могут осуществляться изменения или модификации некоторых аспектов или особенностей различных вариантов осуществления с созданием дополнительных вариантов осуществления, а особенности и аспекты различных вариантов осуществления могут добавляться или замещаться другими особенностями или аспектами других вариантов осуществления, предлагая еще дальнейшие варианты осуществления.
Соответственно, данное изобретение включает все модификации и эквиваленты предмета изобретения, изложенные в формуле изобретения, приложенной к данному документу в соответствии с действующим законодательством. Кроме того, любая комбинация вышеописанных элементов во всех их возможных вариантах охватывается настоящим описанием, если не указано иное или иным образом явно не противоречит контексту.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТЕР ДЛЯ КРЕПЛЕНИЯ КОРОНКИ К РАБОЧЕМУ ОРУДИЮ (ВАРИАНТЫ) И СБОРКА | 2020 |
|
RU2800709C2 |
| КОРОНКА ОРУДИЯ ДЛЯ ЗЕМЛЯНЫХ РАБОТ И СБОРКА ЗЕМЛЕРОЙНОГО ОРУДИЯ | 2020 |
|
RU2816935C2 |
| СПОСОБЫ И УСТРОЙСТВА ДЛЯ ОПРЕДЕЛЕНИЯ ИЗНОСА ДЕТАЛИ С ИСПОЛЬЗОВАНИЕМ ОГРАНИЧИВАЮЩЕЙ МОДЕЛИ | 2020 |
|
RU2801635C1 |
| УСТРОЙСТВА, СПОСОБЫ И СИСТЕМЫ МОНИТОРИНГА СОСТОЯНИЯ ИЗНАШИВАЕМОГО КОМПОНЕНТА | 2020 |
|
RU2837381C2 |
| ИЗНАШИВАЕМЫЙ ЭЛЕМЕНТ | 2016 |
|
RU2722637C2 |
| СПОСОБ ДЛЯ ИЗМЕРЕНИЯ УСИЛИЙ В ЗЕМЛЕРОЙНЫХ МАШИНАХ И УПРАВЛЕНИЯ ЭТИМИ МАШИНАМИ, И ЗЕМЛЕРОЙНАЯ МАШИНА, СОДЕРЖАЩАЯ ТАКУЮ СИСТЕМУ | 2019 |
|
RU2808023C2 |
| СИСТЕМА И СПОСОБ МОНИТОРИНГА РАБОЧЕГО УЧАСТКА | 2018 |
|
RU2754704C2 |
| ЗАЖИМ ДЛЯ СИСТЕМЫ ФИКСАЦИИ РАБОЧЕГО ОРУДИЯ | 2016 |
|
RU2700136C2 |
| СИСТЕМА И СПОСОБ ОБНАРУЖЕНИЯ ИЗНОСА И ПОТЕРИ КОРОНКИ ДЛЯ ЗЕМЛЯНЫХ РАБОТ | 2022 |
|
RU2825885C1 |
| УЗЕЛ КОРОНКИ РАБОЧЕГО ОРУДИЯ С ОПОРНЫМ РЕБРОМ НА КОРОНКЕ | 2017 |
|
RU2753913C2 |

Группа изобретений относится к машинам, которые используют рабочие органы для перемещения объектов или обработки материалов, а также система мониторинга орудия для земляных работ. Технический результат - точность и надежность определения отсутствия повреждения или износа орудия для земляных работ в целях своевременного обслуживания или замены орудия для земляных работ. Система мониторинга орудия для земляных работ для мониторинга состояния орудия для земляных работ, установленного на рабочем орудии, содержит несколько датчиков, выполненных для измерения параметров орудия для земляных работ, установленного на рабочем орудии, по меньшей мере, под двумя разными углами, и электронный контроллер, соединенный с указанными несколькими датчиками. Электронный контроллер выполнен с возможностью получать изображения орудия для земляных работ от датчиков, оценивать изображения с помощью алгоритма, который сравнивает полученное изображение с базой данных существующих изображений, чтобы определить степень повреждения, степень износа или отсутствие орудия для земляных работ, оценивать качество полученного изображения для определения, является ли качество полученного изображения плохим или приемлемым, если только не выполнены определенные условия, при этом выполнение определенных условий включает в себя определение позиции или ориентации рабочего орудия, и/или орудия для земляных работ, и/или рычажного механизма, управляющего позицией рабочего орудия или орудия для земляных работ, определять размер орудия для земляных работ, установленного на рабочем орудии, сравнивать определенный размер орудия для земляных работ, установленного на рабочем орудии, с теоретическим размером нового орудия для земляных работ, установленного на рабочем орудии и рассчитывать отклонение между определенным размером и теоретическим размером. 2 н. и 9 з.п. ф-лы, 32 ил.
1. Система (200) мониторинга орудия для земляных работ для мониторинга состояния орудия для земляных работ (134), установленного на рабочем орудии (104), система (200) содержащая:
несколько датчиков (110), выполненных для измерения параметров орудия для земляных работ (134), установленного на рабочем орудии (104), по меньшей мере, под двумя разными углами (202, 202’); и
электронный контроллер (126), соединенный с указанными несколькими датчиками (110), при этом электронный контроллер (126) выполнен с возможностью:
получать изображения орудия (134) для земляных работ от датчиков,
оценивать изображения с помощью алгоритма, который сравнивает полученное изображение с базой данных существующих изображений, чтобы определить степень повреждения, степень износа или отсутствие орудия (134) для земляных работ,
оценивать качество полученного изображения для определения, является ли качество полученного изображения плохим или приемлемым, если только не выполнены определенные условия, при этом выполнение определенных условий включает в себя определение позиции или ориентации рабочего орудия, и/или орудия для земляных работ, и/или рычажного механизма, управляющего позицией рабочего орудия или орудия для земляных работ,
определять размер орудия для земляных работ, установленного на рабочем орудии (600);
сравнивать определенный размер орудия для земляных работ, установленного на рабочем орудии, с теоретическим размером нового орудия для земляных работ, установленного на рабочем орудии (602); и
рассчитывать отклонение между определенным размером и теоретическим размером (604).
2. Система (200) мониторинга орудия для земляных работ по п. 1, отличающаяся тем, что электронный контроллер (126) дополнительно способен хранить эталонные данные нового орудия для земляных работ, установленного на рабочем орудии (606).
3. Система (200) мониторинга орудия для земляных работ по п. 1, отличающаяся тем, что электронный контроллер (126) выполнен для сравнения отклонения между определенным размером и теоретическим размером с пороговым значением, а если отклонение ниже порогового значения, то тогда электронный контроллер способен подавать предупреждение о том, что орудие для земляных работ нуждается в обслуживании, а если отклонение выше порогового значения, то тогда электронный контроллер способен подавать предупреждения о том, что орудие для земляных работ повреждено или отсутствует, что требует безотлагательного технического обслуживания (610).
4. Система (200) мониторинга орудия для земляных работ по п. 1, отличающаяся тем, что несколько датчиков (110) содержат, по меньшей мере, две камеры (110’), фотографирующие с двух разных точек (210) обзора орудие для земляных работ (134), установленное на рабочем орудии (104), при этом система (200) предназначена для использования с гидравлическим карьерным экскаватором с передней лопатой (102’) со стрелой и шарнирным соединением рукояти (106), и несколько камер (110') установлены на верхней части стрелы и шарнирном соединении рукояти (106) и ориентированы для проведения измерения относительного износа орудия для земляных работ (134) под разными углами (202, 202’), и предоставления оператору обратной связи при необходимости проведения технического обслуживания.
5. Система (200) мониторинга орудия для земляных работ по п. 4, дополнительно содержащая устройство вывода (132), которое соединено с электронным контроллером (126), а электронный контроллер (126) дополнительно способен отправлять сигнал на устройство вывода, на котором отображается изображение орудия для земляных работ, установленного на рабочем орудии (612).
6. Система (200) мониторинга орудия для земляных работ по п. 3, отличающаяся тем, что электронный контроллер (126) дополнительно способен хранить базу эталонных данных для различных орудий для земляных работ и сравнения определенных размеров различных орудий для земляных работ с одним или несколькими эталонными данными (610).
7. Система (200) мониторинга орудия для земляных работ по п. 4, предназначенная для мониторинга нескольких орудий для земляных работ (134), и отличающаяся тем, что несколько камер (110’) размещаются на фиксированном расстоянии (214) от нескольких орудий для земляных работ (134), создавая несколько точек (210) обзора отдельных орудий для земляных работ (134) и предоставляя электронному контроллеру (134) 3D информацию для определения относительного износа между отдельными орудиями для земляных работ (134).
8. Система мониторинга (200) орудия для земляных работ по п. 4, предназначенная для использования с рабочим орудием (104) и несколькими орудиями для земляных работ (134), простирающимися от рабочего орудия (104), и отличающаяся тем, что, по меньшей мере, две камеры (110’) способны просматривать нижнюю часть рабочего орудия (104) и нескольких орудий для земляных работ (134), а электронный контроллер (126) способен отслеживать кинематическую границу действия орудия для земляных работ, для облегчения анализа посторонних изображений или для анализа, сделаны ли изображения днем, ночью, когда идет снег, когда идет дождь, когда есть грязь, когда есть лед, или когда рабочее орудие перемещается (614).
9. Электронный контроллер (126) системы мониторинга орудия для земляных работ по любому из пп. 1-8, содержащий:
запоминающее устройство (508), содержащее исполняемые компьютером команды (510) для распознавания орудия для земляных работ (134); и
процессор (506), соединенный с запоминающим устройством (508) и способный выполнять исполняемые компьютером команды (510), а исполняемые компьютером команды (510), выполненные процессором (506), служат причиной выполнения процессором (506) следующих операций:
получения изображения орудия (134) для земляных работ,
оценки изображения с помощью алгоритма, который сравнивает полученное изображение с базой данных существующих изображений, чтобы определить степень повреждения, степень износа или отсутствие орудия (134) для земляных работ,
оценки качества полученного изображения для определения, является ли качество полученного изображения плохим или приемлемым, если только не выполнены определенные условия, при этом выполнение определенных условий включает в себя определение позиции или ориентации рабочего орудия, и/или орудия для земляных работ, и/или рычажного механизма, управляющего позицией рабочего орудия или орудия для земляных работ,
определения размера орудия для земляных работ, установленного на рабочем орудии;
сравнения определенного размера орудия для земляных работ, установленного на рабочем орудии, с теоретическим размером нового орудия для земляных работ, установленного на рабочем орудии; и
расчета отклонения между определенным размером и теоретическим размером.
10. Электронный контроллер (126) по п. 9, отличающийся тем, что запоминающее устройство (508) хранит в себе пороговое значение, соответствующее определенному размеру орудия для земляных работ (134), а процессор (506) способен сравнивать отклонение между пороговым значением и рассчитанным отклонением между определенным измерением (204) заранее заданного размера и теоретическим размером (206), и отправлять предупреждения исходя из того, является ли рассчитанное отклонение меньше или больше порогового значения (706).
11. Электронный контроллер (126) по п. 9, отличающийся тем, что выполнен с возможностью также осуществлять настройку алгоритма оценки посредством по меньшей мере одного из следующих методов: корректирование размера фильтра или разрешения, увеличение области обзора изображения, уменьшение области обзора изображения и сдвиг области обзора изображения, если качество полученного изображения определено как плохое.
| Токарный резец | 1924 |
|
SU2016A1 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| Токарный резец | 1924 |
|
SU2016A1 |
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |

