(54) ГИДРОСИСТЕМА ТРУБОГИБОЧНОЙ МАШИНЫ С ПРОГРАММНЫМ
УПРАВЛЕНИЕМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидросистема трубогибочной машины с программным управлением | 1976 |
|
SU597575A1 |
| Гидросистема трубогибочной машины | 1979 |
|
SU845963A1 |
| Гидросистема трубогибочной машины с программным управлением | 1982 |
|
SU1101311A1 |
| Гидросистема трубогибочной машиныС пРОгРАММНыМ упРАВлЕНиЕМ | 1979 |
|
SU837472A1 |
| Гидросистема трубогибочной машины с программным управлением | 1982 |
|
SU1018861A2 |
| ГИДРОМЕХАНИЧЕСКОЕ СЛЕДЯЩЕЕ УСТРОЙСТВО СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНЫ | 2007 |
|
RU2372216C2 |
| Устройство для автоматической защиты исполнительного органа горной машины от перегрузок | 1985 |
|
SU1301968A1 |
| НАСОСНАЯ СТАНЦИЯ | 2001 |
|
RU2221166C2 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД | 1992 |
|
RU2037677C1 |
| Устройство ударного действия преимущественно для импульсного нагнетания воды в горный массив | 1987 |
|
SU1502820A1 |
Изобретение относится к обработке металлов давлением, в частйости к гидравлическим приводам трубогибочных машин с программным управлением, а также к устройствам с несколькими исполнительными органами, работающими при различных скоростях и силовых режимах, и может быть использовано в котлостроительной автомобильной, авиационной и других отраслях промышленности где необходима точная гибка труб.
По основному авт.св. № 597575 известна гидросистема трубогибочной машины с программным управлением, содержащая исполнительные приводы гибочного инструмента, линейного перемещения каретки и поворота трубы с распределительными золотниками, и насосную установку, в которой сливная магистраль золотника привода гибочного инструмента соединена параллельно через обратный клапан с напорной магистралью золотника привода линейного перемещения каретки 13«
НедосЯ-атком гидросистеьЫ является ее инерционность. В начальный период гибки момент заполнения маслом соответствующей камеры привода каретки из сливной магистрали привода гибочного инструмента через обратный клапан отстает от момента начала перемещения главного привода. Это приводит к рывку увлекаемой инструментом трубы из 5ажимных губок патрона каретки, которая остается заторможенной без люфтовыми редукторами в передачах. Нежелательным следствием рассогласования времени срабатывания приводов
10 инструмента и каретки является снижение точности гибки, порча поверхности трубы и быстрый выход из строя зажимного патрона.
Цель изобретения - повышение ка15чества гибки.
Поставленная цель достигае,тся тем, что гидросистема трубогибочной машины с программным управлением снабжена гидроаккумулятором и золотником,по20средством которого гидроаккумулятор связан с камерой привода линейного перемещения каретки, подключенной к напорной магистрали при движении каретки .в сторону гибочного инструмента,
25
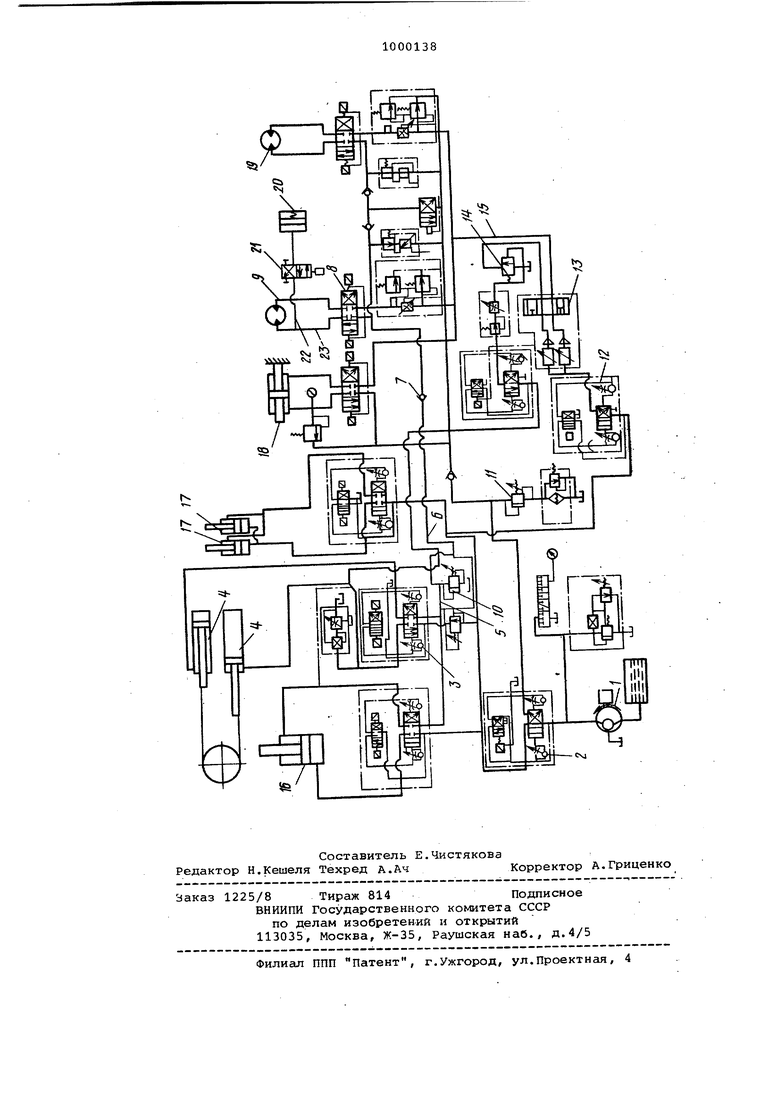
На чертеже представлена схема предпагаемого устройства.
Устройство, содержит насос 1, соединенный с электроэкраном 2 и золотником 3 привода гибочного инструмен30та (главного привода 4). Сливная магистраль 5 отводом 6 через обратный клапан 7 соединена с золотником 8 привода 9 каретки. Сливная магистраль главного привода подперта напорным клапаном 10, а сливная магистраль золотника 8 привода 9 каретки подперта напорным золотником 11.Электроэкран 12 через делитель 13 потока соединен с подпорным клапаном 14 и напорной магистралью 15. Приводы 16 дорна, механизмов 17 зажима и поджи|ма, гидроцилиндр 18 зажима трубы на каретке и привод 19 поворота патрона с помощью трубопроводов соединены с насосом 1. Устройство содержит также гидроаккумулятор 20, соединенный золотником 21 и трубопроводом 22 с гидролинией 23, связывающей одну из камер (одноименную с гидролинией 23) привода 9 каретки с золотником 8.Указанная камера привода 9 при движении Каретки к гибочному инструменту работает на увеличение объема.
Предлагаемое устройство работает следующим образом.
Перед тем, как произвести гиб, включают золотник 21, и масло из гидроаккумулятора 20 по трубопроводу 22 и гидзолинии 23 поступает в одну из камер привода 9 каретки и заполняет ее. После этого включают насос 1, подающий масло через электроэкран 2 и золотник 3 в главный привод 4. В момент начала движения гибочного инструмента .часть масла из сливной магистрали 5 через напорный клапан 10 сливается в бак, а другая часть его по отводу 6 через обратный клапан 7 и золотник 8 поступает в гидролинию 23. Так как соединенная с гидролинией 23 камера привода 9 каретки уже заполнена маслом из гидооаккумулятора 20, перемещения гибочного инструмента и каретки вслед за изгибаемой трубой начинаются практически одновременно, что предотвращает выскальзывание трубы из зажимных губок патрона.
После завершения гиба и возвращения главного привода в исходное положение включается электроэкран 2, и масло через делитель 13 потока поступает в напорную магистраль 15 золотника 8 привода 9 каретки. При этом обратный клапан 7 запирает отвод 6 и масло, поступая в привод 9 при рабочем давлении, перемещает каретку с закрепленной на ней трубой в положение следующего гиба. Одновременно часть масла из гидрапинии 23 по трубопроводу 22 через золотник 21 попадает в гидроаккумулятор 20 и подзаряжает его. При движении каретки в
обратном направлении, когда камера привода 9-, соединенная с гидролинией 23, раббтает на слив, золотник 21 запирает трубопровод 22, предохраняя гидроаккумулятор 20 от разрядки.
Использование пре,цлагаемой гидросистемл позволяет обеспечитьсинхронность срабатывания приводов гибочного инструмента и каретки, что дает возможность устранить выскальзывания
труйл из зажимных губок патрона и обеспечить тем самым повьшение точности многоколенной гибки.
Формула изобретения
Гиот осистема трубогибочной машины с программным управлением по авт.св. 597575, отличающаяся
с тем, что, с целью покушения качества гибки, она снабжена гидроаккумулятором и золотником, посредством которого гидроаккумулятор связан с камерой привода линейнорэ- перемещения каретки,-подключаемой к напорной магистрали при движении каретки в сторону гибочного инструмента.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР
5 597575, кл. В 21 D 9/16, 25.10.76 (прототип).
