1
Изобретение относится к гидравлическим приводам, преимущественно трубогибочных машин с программным управлением, используемым в различных отраслях промьашленности, где необходима точная гибка.
известна гидрюсистема трубогибочной машины с программным управлением содержащая гибочный инструмент с приводом, сливной магистралью, напорным клапаном и золотником, а также подающую каретку с приводом линейного перемещения и обратньш клапаном Ij.
Недостатком данной гидросистемы трубогибочной машины является невозможность регулирования усилия гибки в условиях переменной нагрузки, .между уем в процессе гибки трубы на валу инструмента трубогибочной машины требуется переменное, постепенно возрастающее усилие, так как происходит наклеп материала и в процесс деформации вовлекаются новые его участки. Кроме того, трубогибочные машины с програмглным управлением являются, как правило, универсальными и предназначены для гибки труб различного диаметра, толщины стенки и материала Гидравлический же двигатель привода гибочного инструмента указанной гидосистемы рассчитан на наибольшее з требуемого диапазона усилие гибки, оторое в процессе работы трубогибочной машины не регулируется, в результате чего гибка труб разного диаметра осуществляется при постоянном крутящем моменте и с одинаковой скоростью. Скорость гибки определяется производительностью насосной установки и рабочим объемом гидродвигателя, и чем больше объем гидродвигателя (чем больше площадь поршня), тем скорость меньше. Гидродвигатель привода гибочного инструмента данной гидросистемы .трубогибочной машины рассчитан на наименьшую скорость при наибольшем усилии на его валу независимо от условий деформации материала. Кроме того, чем больше объем гидродвигателя, тем больше за один рабочий цикл вытесняется рабочей жидкости из камеры слива гидродвигателя. Меньшая часть этой жидкости через обратный клаиан подводится к приводу линейного перемещения к.аретки, а большая часть проходит через напорный клапан и сливается в бак. Так как на напорном клапане, который представляет для жидкости определенное сопротивление,, происходит рассеивание энергии, то КПД гидросистемы зависит от каличес гва жидкости, которая в течение цикла пройдет через клапан, т. е. в гидросистеме потери энергии на обратном клапане велики.
Цель изобретения - повышение производительности трубогибочной машины в условиях переменной нагрузки за счет регулирования усилия гибки.
Указанная цель достигается тем, что в гидросистеме трубогибочной машины с программным управлением, содержащей гибочный инструмент с приводом сливной магистралью, напорным клапаном и золотником, а также подающую каретку с приводом линейного перемещения и обратным клапаном, привод гибочного инструмента выполнен в. виде секционного гидродвигателя с основной Hjпо крайней мере, одной дополнительными секциями, связанными общим выходным валом, при этом золотник гибочного инструмента соединен с- основной секцией, а каждая из дополнительных секций также снабжена золотником, кроме того, все секции гидродвигателя, за исключением одной из дополнительных, снабжены реле давления, подключенными каждое к схемам управления соответствующим болотником, напорный клапан установлен в сливной магистрали, основной секции гидродвигателя, а обратный клапан привода линейного перемещения йаретки смонтирован в сливной магистрали основной секции на участке между золотником и напорным клапаном.
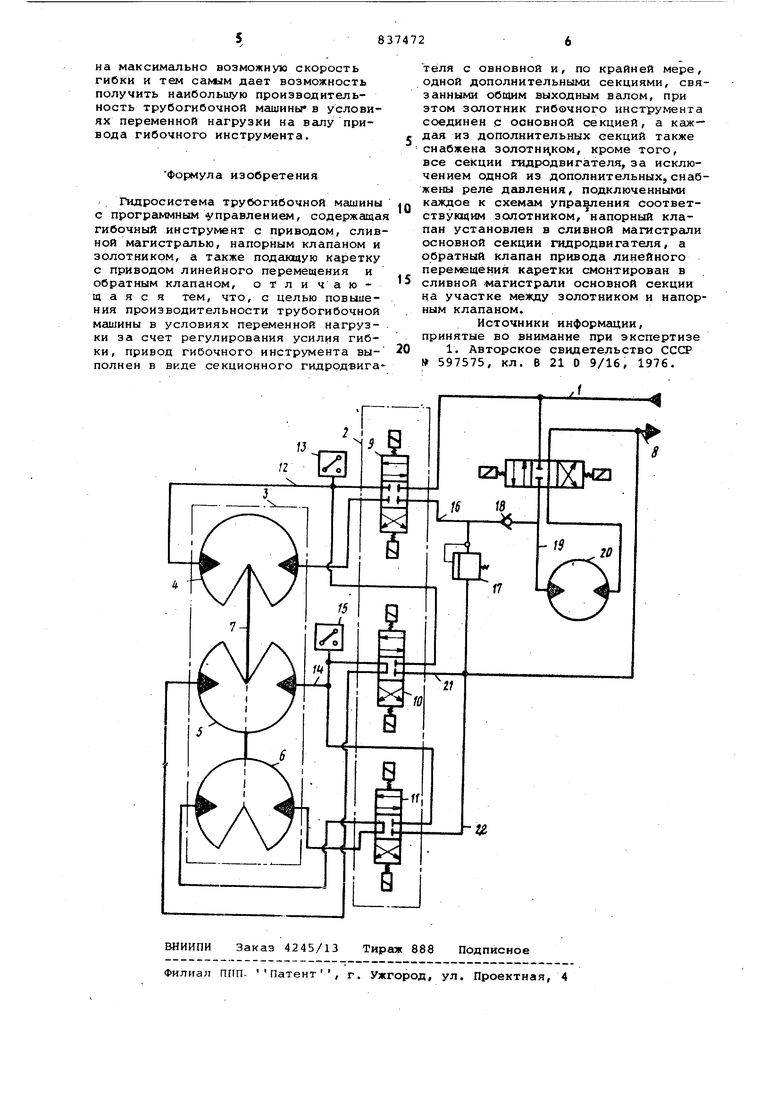
. На чертеже схематично изображена гидросистема.
Гидросистема трубогибочной машины содержит насосную установку (на схеме не показана), связанную напорной магистралью 1 через золотниковое распределительное устройство 2 с гидродвигателем 3 привода гибочного инструмента. Гидродвигатель 3 выполнен с тремя изолированными друг от друга секциями: основной 4 и дополнительными 5 и 6, расположенными вдоль общего ваша 7 с лопастями. Каждая из секций 4, 5 и б разделена лопастями вала 7 на камеры нагнетания и слива, которые соответственно соединены с напорной магистралью 1 и сливной магистралью 8 через трехпозиционные золотники 9, 10 и 11 с электромагнитн лм управлением. С напорной магистрштью 12 секции 4 соединено реле давления 13, контакты которого (на чертеже не показаны) включены в схему управления золотником 10. С напорной магистралью 14 на секции 5 аналогичным образом соединено реле давления 15, а его контакты подключены к схеме управления электромагнитами золотника 11. В сливной магистрали 16 секции 4 между золотником 9 и общей сливной магистралью 8 установлен напорный клапан 17. Участок магистрали 16 между клапаном 17 и золотником 9 через обратный клапан IScoeдинен с напорной магистралью 19 привода 20 линейного перемещения каретки Кроме того, гидросистема включает сливные магистрали 21 и 22 секций 5 и 6.. ,
Гидравлическая система работает следующим образом.
При включении прямого хода золотника 9 рабочая жидкость из напорной магистрали 1 поступает в камеру нагнетания основной секции 4 гидродвигател
3привода гибочного, .инструмент.а. Вал
7 проворачивается .и вытесняет жидкост из камеры слива секции 4 в магистраль 16. Одновременно происходит перекачивание масла в секциях 5 и .6 из камер слива в камеры нагнетания через золоТники 10 и 11, которые находятся в средних положениях, как показано на схеме. При увелиуении сопротивления вращению вала 7 гидродвигателя 3 давление в напорной магистрали 12 секции
4повышается. Когда оно превышает величину настройки реле 13, последнее срабатывает и включает своими контактами электромагниты золотника 10. Золотник 10 соединяет камеру нагнетания секции 5 с напорной магистралью 1,- а камеру слива этой секции - с магистралью 8. В результате подключения дополнительной секции 5 и увеличения рабочей площади лопастей вала 7 крутящий момент на валу 7 гидродвигателя 3-увеличивается, при этом уменьшается давление в магистралях 1, 12 и 14 и скорость вращения вала 7. В случае, если давление в напорных магистралях 1, 12 и 14 не уменьшается, т.е. крутящий момент вала 7 оказывается все же меньше момента сопротивления, аналогичным образом срабатывает реле 15, и золотник 11 подключает к магистрали 1 еще одну дополнительную секцию 6. При уменьшении в процессе дальнейшей работы гидродвигателя 3 давления в магистралях 1, 12 и 14 ниже величины, на которую настроены реле 13 и 15, происходит отключение дополнительных секций 5 и б и скорост вала 7 снова увеличивается. Независимо от числа подключенных секций через напорный клапан 17 проходит рабочая жидкость, вытесненная лопатками вала 7 только из камеры слива основной секции 4. Жидкость из камер слива секций 5 и б по магистралям 21
и 22 попадает в йливную магистраль 8, минуя клапан 17. Подвод рабочей жидкости к приводу 20 линейного перемещения каретки осуществляется через .обратный клапан 18 от участка магистрали 16 между золотником 9 и клапаном 17.
Использование изобретения позволяет обеспечить адаптивную ступенчатую настройку гидравлической системы
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидросистема трубогибочной машины с программным управлением | 1982 |
|
SU1101311A1 |
| Гидросистема трубогибочной машины | 1979 |
|
SU845963A1 |
| Гидросистема трубогибочной машины с программным управлением | 1981 |
|
SU1000138A2 |
| Гидросистема трубогибочной машины с программным управлением | 1976 |
|
SU597575A1 |
| ГИДРОСИСТЕМА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2003 |
|
RU2252909C2 |
| БУРИЛЬНАЯ МАШИНА | 1994 |
|
RU2084626C1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2003 |
|
RU2264347C2 |
| Станок для обработки камня | 1984 |
|
SU1196241A1 |
| ГИДРОРАСПРЕДЕЛИТЕЛЬ | 2012 |
|
RU2500927C1 |
| Гидросистема бурильной установки | 1980 |
|
SU907234A1 |
