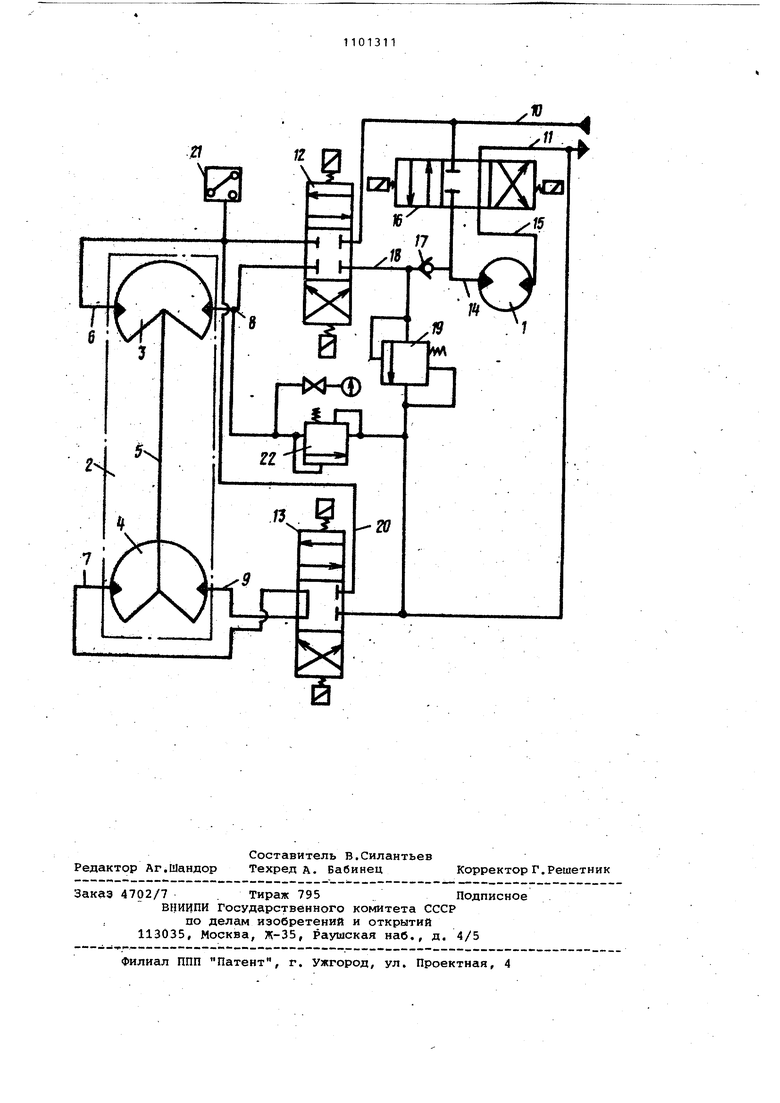
Изобретение относится к конструкциям гидроприводов трубогибочных машин с программным управлением, испол зуемым для гибки труб методом наматы вания в котлостроительной, автомобильной неЛтегаэовой, авиационной и других отраслях промышленности. Известна гидросистема трубогибочной машины с программным управлением содержащая соединенные с напорной и сливной магистралями гидропривод линейного цереметения каретки и привод гибочного инструмента, выполненный в виде многосекционного лопастного гидродвигателя, основная и ;дополнительная секции которого связаны общим ВЫХОДНЫГ.1 валом, реле давления, подключенные к кггмерам нагнетания всех секций, за-исключением одной дополнительной, а также напорный и обратный клапаны, подключенные между приводами каретки и инструмента l Недостатком известного устройства является то, что в случае поломки его напорного клапана вс/е масло из гидродвигателя гибочного инструмента будет поступать в привод каретки крутящий момент и скорость вращения которого резко возрастут. А так как в момент гибки труба зажата одновременно на гИбочном инструменте и в зажимном патроне каретки продольной подачи, торассогласование скоростей этих механизмов может вызвать их повреждение. i Кроме того, в известном устройстве при, возвращении гибочного инструмента после гибки в исходное положение масло подается в его привод из напорной магистрали под таким же давлением, как и во время рабочего хода. В результате этого при сбое программы или из-за ошибки оператора в период наладки трубогибочной машины Появляется опасность повреждения трубы и поломки удерживающих ее механизмов инструментом, совершающим холостой обратный ход с повышенным крутящим моментом. Цель изобретения - повышение надежности устройства. Указанная цель достигается тем, что гидросистема трубогибочной машины с програ 1мным управлением, содержащая соединенные с напорной и сливной магистралями гидропривод линейно го перемещения каретки .и привод гибочного инструмента, выполненный в виде многосекционного лопастного гид родвигателя основная и дополнительная секции которого связаны с общим выходным валом, реле давления, подключенные к камерам нагнетания всех секций,, за исключением одной дополнительной, а также напорный и обратный клапаны, подключенные между приводами каретки и инструмента, снабжена дополнительным напорным клапаном, соединенным трубопроводами с камерой слива основной секции и слиь ной магистралью. На чертеже представлена гидравлическая схема предлагаемого устройства. Гидросистема трубогибочной машины с программным управлением содержит привод 1 линейного перемещения каретки продольной подачи трубы, а также привод 2 гибочного инструмента, выполненный в виде лопастного гидродвигателя, в котором имеются основная 3 и по крайней мере одна дополнительная 4 секции. Каждая из секций 3 .и 4 разделена лопастями общего выходного вала 5 на камеры нагнетания б и 7 и слива 8 и 9, соединенные с напорной магистралью 10 и сливной-.магистралью 11 через трехпозиционные золотники 12 и 13 с электромагнитным управлением. Аналогичные камеры нагнетания 14 и слива 15 имеются и в односекционном приводе 1 линейного перемещения каретки, подключенном к глагистралям 10 и 11 с помощью золотника 16. Камера 14 нагнетания привода 1 через обратный клапан 17 и трубопровод 18 соединена также с одним из входов золотника 12, который подкдючен к сливной магистрали 11 через напорный клапан 19. Камера 6 нагнетания основной секции 3 привода 2 соединена с входом 20 золотника 13 и с реле 21 давления, контакты которого включены в схему управления золотником 13, а камера 8 слива через напорный клапан 22 соединена со сливной магистралью 11. Предлагаемое устройство работает следующим образом. При включении золотника 12 масло из напорной магистрали 10 поступает в камеру 6 нагнетания привода 2 гибочного инструмента. Вал 5 поворачивается и вытесняет масло своими лопастями из камеры 8 слива секции 3 в трубопровод 18, Одновременно с этим в секции 4 происходит перекачивание рабочей жидкости из камеры 9 слива в камеру 7 нагнетания через золотник 13, который находится в нейтральном положении (как показано на чертеже). Из трубопровода 18 часть масла сливается в магистраль 11 через напорный клапан 19, настроенный на меньшую величину давения, чем клапан 22, а другая часть абочей жидкости через обратный клаан 17 поступает в камеру 14 нагнеания привода 1 и вызывает принуительное перемещение каретки вслед за изгибаемой трубой. При гибке труб большого диаметра или при увеличении сопротивления
вращению вала 5 в процессе гибки| например из-за наклепа трубы, давление в камере 6 нагнетания повышается. Когда оно достигает величины настройки реле 21, последнее срабатывает и« включает своими контакта ми электромагнит золотника 13, который соединяет камеру 7 нагнетания секции 4 с камерой 6, а камеру 9 слива - с магистралью 11, обеспечивая таким образом увеличение крут щего момента на валу 5.
В момент рабочего хода гидродвИгателя 2 клапаны 19 и 22 соединены параллельно, поэтому в случае выхода из строя напорного клапана 19 давление в приводе 1 каретки повысится до величины настройки клапана 22 и через него будет происходить слив избыточного количества масла. Благодаря этому предотвращается возможность поломки зажимающих трубу в процессе гибки механизмов каретки и гибочного инструмента..
Для возвращения гидродвигателя 2 после гибки в исходное положение золотник 12 подключает камеру 8 к напорной магистрали 10, а камеру б - к трубопроводу 18. Поступающее
в камеру 8 масло заставляет гидро двигатель 2 вращаться в обратном направлении, а часть масла сливается в магистраль 11 через напорный клапан 22, который поддерживает в системе небольшое давление, достаточное только-для перемещения вала 5 без нагрузки. Если в этот период произойдет сбой программы и вращающийся на холостом ходу инструмент упрется в трубу, зажатую механизмами каретки продольной подачи, то вал 5 остановится. При этом через клапан 22 будет происходить слив всей поступа;ющей из маристрали 10 рабочей жидкости. Снижение крутящего момента инструмента на холостом ходу делает работу трубогибочной машины более безопасной.
Использование изобретения позволит предотвратить возможность повреяэдения механизмов каретки продольной подачи и гибочного инструмента из-за случайных ошибок при управлении трубогибочной машиной из-за выхода из строя напорного клапана fl цепи привода каретки и благодаря этому обеспечивает более высокую надежность устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидросистема трубогибочной машиныС пРОгРАММНыМ упРАВлЕНиЕМ | 1979 |
|
SU837472A1 |
| Гидросистема трубогибочной машины с программным управлением | 1976 |
|
SU597575A1 |
| Гидросистема трубогибочной машины с программным управлением | 1981 |
|
SU1000138A2 |
| Гидросистема трубогибочной машины | 1979 |
|
SU845963A1 |
| Станок для обработки камня | 1984 |
|
SU1196241A1 |
| БУРИЛЬНАЯ МАШИНА | 1994 |
|
RU2084626C1 |
| ГИДРОСИСТЕМА | 2000 |
|
RU2205301C2 |
| Бурильная машина | 1986 |
|
SU1320406A1 |
| ГИДРОСИСТЕМА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2003 |
|
RU2252909C2 |
| Гидросистема трубогибочной машины с программным управлением | 1982 |
|
SU1018861A2 |
ГИДРОСИСТЕМА ТРУБОГИБОЧНОЙ МАШИНЫ С ПРОГРАММНЫМ УПРАВЛЕНИЕМ, содержащая соединенные с напорной и сливной магистралями гидропривод линейного перемешения каретки и привод. гибочного инструмента, выполненный в виде многосекционного лопастного гидродвигателя, основная и дополнительная секции которого связаны общим выходным валом,, реле давления, подключенные к камерам нагнетания всех секций, за исключением одной дополнительной, a также напорный и обратный клапаны, подключенные между приводами каретки и инструмента, отличающаяся тем, что, с целью повышения надежности, она снабжена дополнительным напорным клапаном, соединенным трубопроводами с камерой слива основной секции и слив-§ ной магистралью. ko
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Гидросистема трубогибочной машиныС пРОгРАММНыМ упРАВлЕНиЕМ | 1979 |
|
SU837472A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
