(54) СПОСОБ БАЛАНСИРОВКИ КОЛЕНЧАТЫХ ВАЛОВ С ТРЕЯМ ПЛОСКОСТЯМИ КОРРЕКЦИИ (ЕГО ВАРИАНТЫ) 

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ настройки станка для балансировки коленчатых валов | 1983 |
|
SU1163169A1 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1229620A2 |
| Измерительное устройство к балансировочному станку | 1982 |
|
SU1096510A1 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1264018A2 |
| Измерительное устройство к балансировочному станку | 1987 |
|
SU1415092A1 |
| Измерительное устройство к балансировочному станку | 1984 |
|
SU1221516A1 |
| Измерительное устройство станка для балансировки коленчатых валов | 1990 |
|
SU1714401A1 |
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1146562A1 |
| Измерительное устройство станка для балансировки коленчатых валов | 1983 |
|
SU1193473A1 |
| Измерительное устройство к балансировочному станку | 1981 |
|
SU981834A1 |
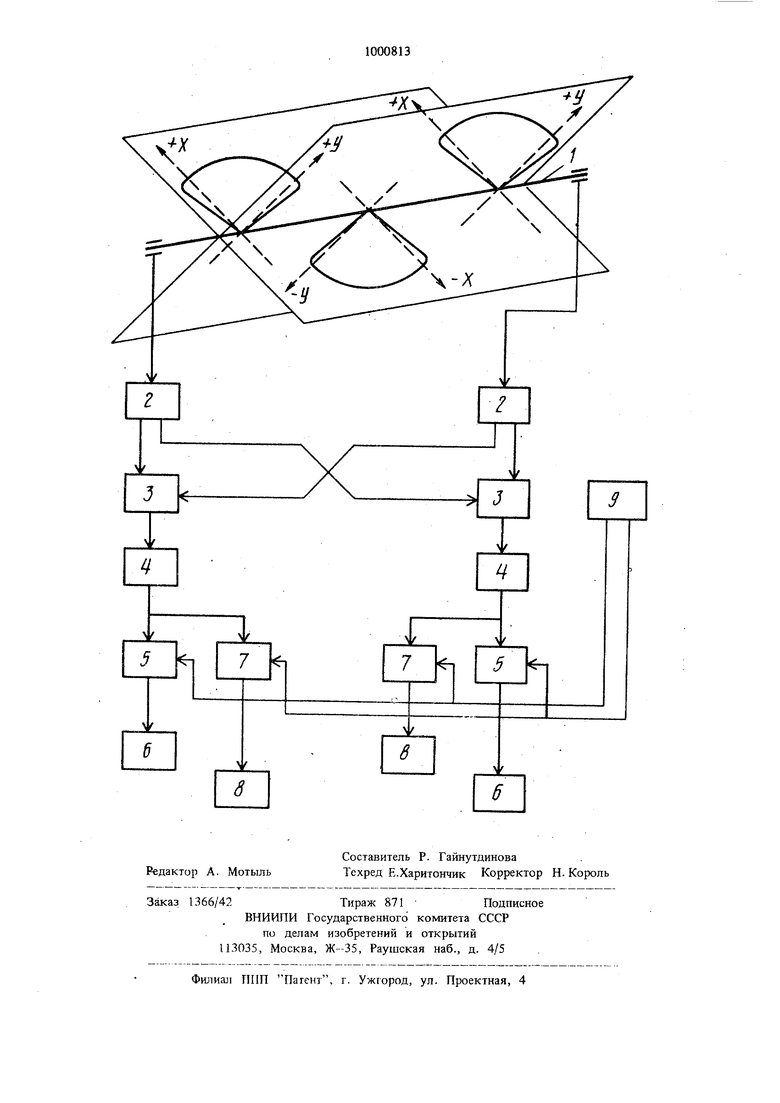
Изобретение относится к балансировочной технике и может быть использовано при балансировке коленчатых валов с тремя плоскостями коррекции с симметричным расположением средней плоскости относитель но крайних. К числу таких коленчатых валов относятся и коленчатые валы с четырь мя} противовесами, у которых два средних противовеса расположены близко друг от другу, например коленчатые валы четырехцилиндровых двигателей внутреннего сгорания и др. Известен способ балансировки валов .с тр мя плоскостями коррекции, заключающийся в том, чго балансируемый вал устанавливают на опоры станка, при вращении вала определяют колебания опор и дисбаланс вал приведенный. к крайним плоскостям коррекции, производят разложение дисбаланса на статическую и момеитную составляющие и корректируют статическую составляющую в среднем противовесе, а моментную - в крайних (11. Недостатком известного способа является то, что он неприменим к балансировке коленчатых валов, зоны коррекции у которых в противовесах ограничены в пределых 90- 180°, а средние и край1ше противовесы развернуты на 180° относительно друг друга. Поэтому выбор противовеса, в котором можно скорректировать дисбаланс, обусловлен не наличием стат ической или моментной составляющих, а только угловым расположением начального дисбаланса. Наиболее близким к предлагаемому по технической сущности является способ балансировки коленчатых валов с тремя плоскостями коррекции, заключающийся в том, что балансируемый вал устанавливают на опоры станка, при вращении вала определ5Гют колебания опор и дисбаланс вала, приведенный к крайним плоскостям коррекции, производят разложение дисбаланса на проекции, а балансировку вала производят коррекцией в крайних и средних противовесах, при этом величины корректирующих масс определяются перерасчетом дисбаланса на эквивалентные дисбалансы 2. Недостатком способа является низкая точ ность балансировки коленчатых алов с тре мя плоскостями коррекции, так как влияние средней плоскости коррекции на крайние у симметрично расположенной средней плоскости практически одинаково и не учи тывается при пересчете, кроме того, не учитываются направления проекций вектора дисбаланса. Цель изобретения по первому варианту повышение точности балансировки при разнополярных проекциях, цель изобретения по второму варианту-- повышение точности балансировки при отрицательных проекциях, целью обеспечения по третьему варианту - повышение точности балансировки при поло жительных проекциях. Постеленная цель достигается тем, что согласно способу балансировки коленчатых валов с тремя плоскостями коррекции по первому варианту, заключающемуся в том что балансируемый вал устанавливают на опоры станка, при вращении вала определяют колебания опор и дисбаланс вала, Приведенный к крайним плоскостям коррек ции, производят разложение дисбаланса на проекции, а балансировку вала производят коррекцией противовесов, производят корре 1ЩЮ среднего .противовеса корректирующей массой, величина которой равна удвоенной величине отрицательной проекции, и крайнего противовеса, в плоскости которого проекидя положительна, корректирующей массой, величина которой равна сумме величины проекций. Поставле1шая цель достигается тем, «по согласно способу балансировки колетатых валов с тремя плоскостями коррекции по второму варианту, заключающемуся в том, что балансируемый вал устанавливают на опоры станка, при вращении вала определяют колебания опор и дисбаланс вала, при веденный к крайним плоскостям коррекции производят разложение дисбаланса на проекции, а балансировку вала производят j. коррекцией противовесов, производят коррек шло среднего противовеса корректирующей массой, величина которой равна удвоенной величине большей по величине нроекции, и крайнего противовеса, в плоскости которого проекция имеет меньшую велимну, корректирующей массой, величина которой равна разности величин проекцлй. Поставленная цель достигается тем, что соп1Я- ю способу балансир звки коленчатых чале с тремя шюскостями 1 оррек1ши по rpeikt-fr, варианту, заключающемуся в том. 134 что балансируемый ; вал установлен на опоры станка, при вращении вала определяют колебания опор и дисбаланс вала, приведенный к крайним плоскостям коррекции, производят разложение . дисбаланса на проекции, а балансировку вала производят коррекцией противовесов, производят коррекцию крайних противовесов корректирующими массами, величины которых равны величинам соответствующих проекций. На чертеже изображена схема устройства, реализующего способ балансировки коленчатых валов с тремя плоскостями коррекции. Устройство содержит две измерительные цепи, связанные с крайними плоскостями коррекции балансируемого коленчатого вала 1, при этом обе цепи выполнены идентично и каждая из них содержит последовательно соединенные датчик 2 дисбаланса, сумматор 3, усилитель 4, синхронный детектор 5, индикатор 6 проекции X, а также второй синхронный детектор 7, вход которого связан с выходом усилителя 4, и связан с выходом детектора 7 второй индикатор 8 проекции У, второй выход датчика 2 дисбаланса одной из цепей связан с вторым входом сумматора 3 другой цепи. Устройство содержит также генератор 9 опорного сигнала, выходцы которого связаны с входами синхронных детекторов 5 и 7 каждой цепи. Способ балансировки коленчатого вала с тремя плоскостями коррекции осуществляют следующим образом. Балансируемый коленчатый вал с тремя плоскостями коррекции, в которых расположены противовесы, устанавливают на опоры станка, приводят вал во вращение, определяют колебания опор станка, пропорциональные дисбалансу вала 1 в плоскости опоры, датчиками 2 дисбаланса колебания воспринимаются и преобразуются в электрический сигнал, который .поступает на сумматоры 3, где происходит разделение плоскостей коррекщ1и. На выходе сумматоров 3 появляются два сигнала, каждый из которых пропоридонален дисбалансу в соответствующей крайней плоскости коррекции. Выходной сигнал сумматоров 3 усиливается и фильтруется от помех усилителем 4 и раскладывается на проекции в прямоугольной системе координат с помощью синхронных детекторов 5 и 7, на вторые входы которых приходят сдвинутые на 90° друг относительно друга выходные напряжения генератора 9 опорного сигнала. Выходные напряжения синхронных детекторов 5 и 7, пропорциональные проекции дисбаланса в крайних плоскостях коррекщш, измеряются и запоминаются на индикаторах 6 и 8 проекций, в качестве которых могут быть Т1)(1мрйены стрелочные приборы с йулем посередине с электронным запоминающим устройство Знак проекции определяется по направлению отклонения стрелки от нуля, например, плюс отклонение вправо, а минус - влево. При раэнополярных проекциях на индикаторах 6 каждой цепи по первому варианту производят коррекцию среднего противовеса корректирующей массой, величина которой р на удвоенной величине отрицательной проекции, и крайнего противовеса, в. плоскости которого проекция положительна, корректиру щей массой, величина которой равна сумме величин проекций. При отрицательных проекциях на индикаторах 6 каждой цепи по второму варианту производят коррекцию, среднего противовеса корректирующей массой, величина которой равна удвоенной величине большей по величине проекции, и крайнего противовеса, в плоскости которого проекция имеет меньшую величину, корректирующей массой, величина .которой равна разности величин проекций. При положительных проекциях на индикаторах 6 каждой цепи по третьему варианту производят коррекцию крайних противовесов корректирующими массами, величины котооых равны величинам соответствующих проекций. Аналогично производится коррекция при получении проекций дисбаланса на индикаторах 8. Применение предлагаемого способа позволяет повысить точность балансировки коленч тых валов с тремя плоскостями коррекции за счет учета дисбаланса по всем трем плос костям коррекции вала. Формула изобретения 1. Способ балансировки коленчатых валов с тремя плоскостями коррекции, заключающийся в том, что балансируемый вал устанавливают -на опоры станка, при вращении вала определяют колебания опор и дисбаланс вала, приведенный к крайним плоскостям коррекции, производят разложение дисбаланса на проекции, а балансировку ва ла производят коррекцией противовесов. отличающийся тем, что, с целью повышения точности балансировки при разнополярных проек циях, производят коррекцию среднего противовеса корректирующей массой, величина которой равна удвоенной величине отрицательной проекции, и крайнего противовеса, в плоскости которого проекция положительна, корректирующей массой, величина которой равна сумме величин проекций. 2- Способ балансировки коленчатых в.алов с тремя плоскостями коррекции, заключаю,щийся в том, что балансируемый вал устанавливают на опоры станка, при вращении вала определяют колебания опор и дисбаланс вала, приведенный к крайним плоскостям коррекции, производят разложение дисбаланса на проекции, а балансировку вала производят коррекций противовесов, отличающийся тем, что, с целью повыпкния точности балансировки при отрицательных проекциях, производят коррекцию среднего противовеса корректирующей массой, велишна которой равна удвоенной величине большей по величине проекщш, и крайнего противовеса, в плоскости которого проекция имеет меньшую величину, корректирующей массой, величина которой равна разности величин проекций. 3. Способ балансировки коленчатых валов с тремя плоскостями коррекции, заключающийся в том, что балансируемый вал устанавливают на опоры станка, при вращении вала определяют колебания опор и дисбаланс вала, приведенный к крайним плоскостям коррекции, производят разложение дисбаланса на проекции, а балансировку вала производят коррекцией противовесов, о тличающийся тем, что, .с целью повышения точности балансировки при положительных проекциях, производят коррекцию крайних противовесов корректирующими массами, величины которых равны величинам соответствующих проекций. Источники информации, принятые во внимание при зкспертизс 1.Основы балансировочной . Под ред. В. А. Щепетильникова. Т. 1, М., Машиностроение, 1975, с. 237-241. 2.Авторское свидетельство СССР ° 761863. кл. G 01 М 1/22, 1978 (прототип).
