Изобретение относится к балансировочной технике, может быть использовано в автоматических станках для балансировки коленчатых валов с тремя плоскостями коррекции, к числу которых относятся и коленчатые валы с четырьмя противовесами и средними противовесами, располол ен- ными близко один от другого, т.е. большинство коленчатых валов четырехцилиндровых рядных двигателей внутреннего сгорания, и является усовершенствованием устройства по авт. св. № 1096510.
Цель изобретения - повышение точности определения параметров дисбаланса путем исключения погрешности при разложении дисбаланса на проекции, возникающей при небольших колебаниях скорости вращения.
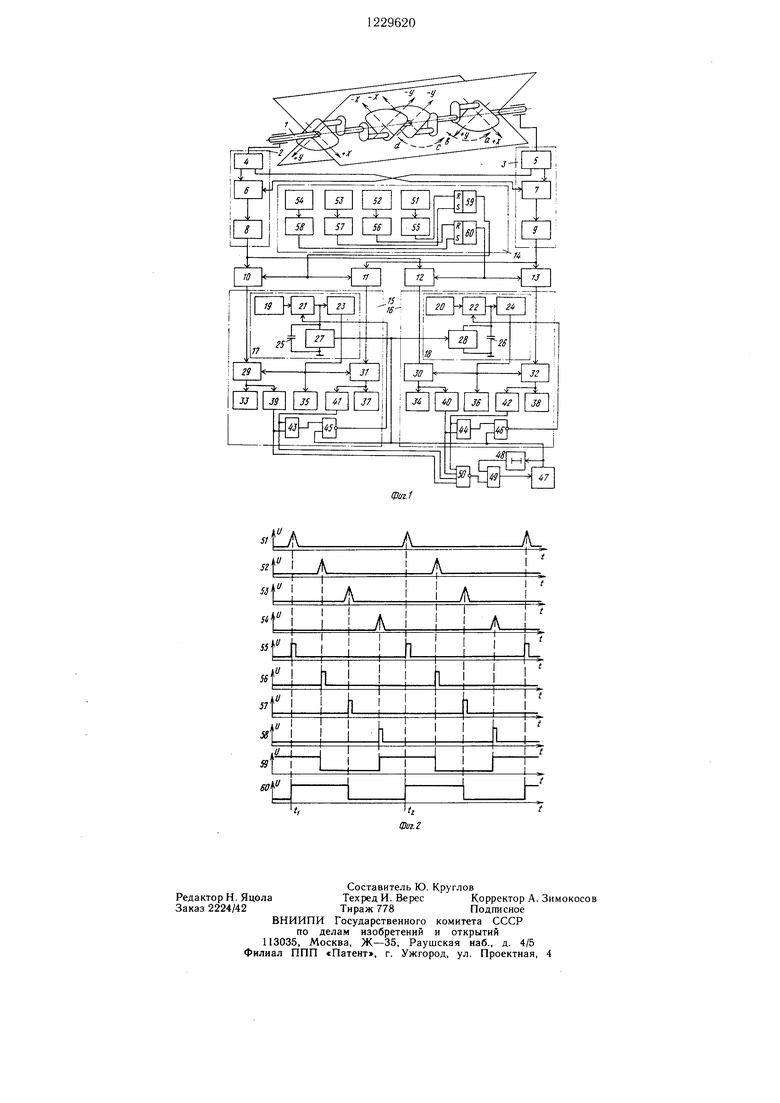
На фиг. 1 изображена функциональная схема измерительного устройства к балансировочному станку; на фиг. 2 - временные диаграммы работы элементов измерительно- го устройства, номера которых, обозначенные в левой части фиг. 2, соответствуют номеру элементов на фиг. 1; интервал времени iz-ti соответствует времени одного оборота коленчатого вала.
Балансируемый коленчатый вал 1 рядного двигателя внутреннего сгорания с тремя противовесами (два средних противовеса расположены рядом и при измерении прини.мают- ся за один), на которых через х и у обозначены оси коррекции, устанавливается на связанные обшей рамой опоры балансировочного станка (на фиг. 1 не показаны). Через оси коррекции проведены две осевые плоскости коррекции.
Устройство содержит два входных блока 2 и 3, каждый из которых выполнен в виде соединенных последовательно датчика 4(5) дисбаланса, сумматора 6(7), второй вход которого соединен с выходом датчика 5 (4) дисбаланса другого блока 3(2), и усилителя 8(9), четыре синхронных детектора 10-13, первые входы синхронных детекто- ров 10 и 12 связаны с выходом усилителя 8, а первые входы синхронных детекторов 11 и 13 - с выходом усилителя 9, генератор 14 опорных сигналов, каждый выход которого связан с вторыми входами попарно соединенных синхронных детекторов 10 и 11, 12 и 13, два блока 15 и 16 измерения проекций, отнесенных к определенной осевой плоскости коррекции .г и у, каждый и.з которых выполнен в виде регулируемого источника 17 (18) напряжения, содержащего соединенные последовательно источник 19(20) постоянного тока, аналоговый ключ- 21 (22) и согласующий усилитель 23(24), а также интегратор 25(26) и второй аналоговый ключ 27(28), вход которого связан с выходом интегратора 25 (26), а выход - с входами интегратора 25(26) и первого аналогового ключа 21 (22), первого и второго сумматоров 29(30) и 31(32), входы которых соединены соответственно с выходами синх
5
Q
5
о 5
0
5
ройных детекторов 10(12) и 11(13), первого индикатора 33(34) крайней плоскости коррекции, вход которого соединен с выходом сумматора 29(30), индикатора 35(36) проекции средпей плоскости коррекции, вход которого соединен с вторыми входами су.мма- торов 29(30) и 31(32) и с выходом согласующего усилителя 23(24), второго индикатора 37(38) крайней плоскости коррекции, вход которого соединен с выходом сумматора 31(32), двух компараторов 39(40) и 41(42), вхо.аы которых подключены соответственно к выходу сумматоров 29(30) и 31 (32), логического элемента 2ИЛИ 43(44), два входа которого соединены соответственно с выходами компараторов 39(40) (42), и логического элемента 2И-НЕ 45(46). первый вход которого соединен с выходом логического элеме1гга 2ИЛИ 43(44). а выход - с вторым входо.м первого анало- ключа 21(22), блок 47 управления, элемент 48 временной задержки, вход которого соединен с выходом блока 47 управления, с соедине11ными .между собой вторы.ми входами логических элементов 2И-НЕ 45 и 46 входами аналоговых ключей 27 и 28 логический элемент 2И 49, первый вход которого соединен с выходом элемента 48 временной задержки, а выход - с входом б, 47 управления, и логический элемент 4ИЛИ-1-1Е 50, каждый из входов которого соединен соответственно с выходом компараторов 39-42, а выход - с вторым входом логического элемента 2И 49. Генератор i4 опорных сигналов выполнен в виде четырех датчиков 51-54 импульсов, места установки которых на раме обозначены через а. Ь, сие соответственно, четырех фор- м.чрователей 55-58, входы которых соединены соответственно с выходами датчиков 51--54 импульсов, и двух триггеров 59 и 60, выходы которых являются выходами блока (4 опорных сигналов, R-вход триггера 59 соединен с выходом формирователя 55, а S-вход - с выходом формирователя 57, R-вход триггера 60 соединен с выходом формирователя 56, а S-вход - с выходом формирователя 58.
Устройство работает следующим обра
Колебания опор станка, пропорциональные дисбалансу коленчатого вала 1 в плоскости опоры, воспринимаются и преобразовываются в электрический сигнал датчиком 4(5) дисбаланса, связанным с опорой балансировочного станка. С помощью сумматоров 6 и 7 производится разделение плоскостей коррекции, совпадающих с крайними противовесами. Выходной сигнал сумматора 6(7) усиливается и фильтруется от помех усилителя 8(9), и раскладывается на проекции в косоугольной системе координат с помощью синхронных детекторов 10(11) и 12(13), на управляющие входы которых приходят сдвинутые одно относительно другого выходные
напряжения генератора 14 опорных сигналов Для одной пары синхронных детекторов, раскладываюш.их сигналы на проекции по двум осям, сдвиг между опорными напряже- ниями равен 180°-а, где а. - угол между осями коррекции. Датчики 51 и 52 импульсов устанавливаются на раме плоскости вращения первой шатунной шейки коленчатого вала, а датчики 53 и 54 импульсов - Б плоскости вращения второй шатунной шейки.
Если угол е(, 90°, то датчик.и 51 и 52 (53 и 54) импульсов в плоскости одной шатунной шейки устанавливаются под углом ct, а если угол , то датчики 51 и 52 (53 и 54) импульсов в плоскости врашения одной шатунной щейки устанавливаются под углом 180°-а для уменьшения зоны, зани.маемой датчиками псд установку. В этом случае опорный сигнал снимается с инверсного выхода соответствующего триггера (59 и 60), чем ко.мпенейру- ется сдвиг одного опорного сигнала при установке датчика. Угол установки датчиков импульсов в одной паре и в другой одинаковый. Каждый из датчиков 51-54 импульсов может быть выполнен в виде светоиз- лучателя (светодиод), светоприемника (фото диод) и предварительного усилителя. В момент прохождения шатунной шейки коленчатого вала над датчиками 51-54 на выходе последнего появляется импульс (фиг. 2).
Предположим, что на станке измеряется дисбаланс коленчатого вала рядного двигателя внутреннего сгорания (например, коленчатый вал легкового автомобиля). Шатунные шейки (первая и вторая) у таких коленчатых валов сдвинуты на 180°. Для получения одного опорного сигнала используются два датчика импульсов, которые расположены под равными шатунными шейками и в одной плоскости, проходящей через ось врашения коленчатого вала в точки а и с. Датчики 51-54 устанавливаются на раму, связывающую опоры балансировочного стан- ка, которая при вращении вала колеблется на опорах вместе с ним, чем достигается постоянное положение датчиков 51-54 относительно оси вращения балансируемого коленчатого вала и, как следствие, стабильность формируемых опорных сигналов. Вы- ходные напряжения синхронных детекторов 10-13, пропорциональные проекциям дисбаланса в крайних плоскостях коррекции, измеряются и запоминаются индикаторами 33 и 37 проекций для осевой плоскости х и индикаторами 34 и 38 проекции для осевой плоскости Y- Каждый из индикаторов 33 - 38 проекции представляет собой аналоговое запоминающее устройство со стрелочным прибором на выходе. Если в процессе измерения проекций дисбаланса в крайних плоское- тях коррекции коленчатого вала, совпадающих с плоскостями крайних противовесов, получаются только положительные знаки проекций (направление обозначено знаком
5
0
0
5
0 5 5
0
5
0
«-f на осевых плоскостях коррекции), т.е. дисбаланс может быть скорректирован в крайних противовесах, то задача бала.исиров- ки в этом случае сводится к балансировке коленчатого вала с двумя, плоскостями коррекции, и коррекция дисбаланса такого ко:1енча- того вала производится но результатам измерения, запоминаемых индикаторами 33, 37, 34 и 38. Отрицательные проекции, совпадающие с направлением среднего противовеса коленчатого вала, требуют перссчстл сиг налов, пропорциональных проекциям дисбаланса в крайних плоскостях ко()рекции, 1ак как скорректировать отрпцате/)ьпую проекцию дисбаланса в плоскости невозможно из-за отсутствия материала.
В случае пол) ченпя нп одном из 1НД1-:- каторов проекций, относящихся к (х эщой осевой плоскости коррекци :, канриме .s, отрицательного значения проекции дисб;:.апсj, что соответствует, например, отрицатоль; и1-: полярности напряжения на выходе ciiHxpoH- ных детекторов 10 и И, cpaбaт ;Б: or одн;; из компараторов 39 или 41, iK;)oi срабатывания которых устанавливается равны,; отрицательному напряжению, определяемому остаточны.м дисбалансом балансируемого коленчатого вала, и настраивается при наладке станка. При срабатывании одного из компараторов 39 и 41 на одном из входов логического элемента 2ИЛИ 43 появ. 1яется Biv- сокий уровень напряжения, который с выхода логического элемента 2ИЛИ 43 nocix- пает на первый вход логического элемента 2И-НЕ 45. На второй вход этого элемента поступает высокий уровень с выхода блока 47 управления, который формирует команду на начало измерения. По команде с выхода блока 47 управления закрывается аналоговый ключ 27, который щунтпрует выход интегратора 25. Одновременно при наличии двух высоких уровней на входе логического элемента 2И-НЕ 45 на его выходе появляется низкий уровень напряжения, который поступает на управляющий вход аналогового ключа 21, открывает его, источник 19 постоянного тока оказывается подключенным к интегратору 25, и напряжение на входе согласующего усилителя 23 возрастает от нуля (интегратор до этого был зашу|-1тирован) по линейному закону.
На вторые входы сумматоров 29 и 3 поступает положительное напряжение, значение которого нараетает во времени. В результате появления положительного по знаку напряжения на вторых входах сумматоров 29 и 31 показания индикаторов 33 и 37 проекций начинают изменятьея. Отрицательная проекция начинает уменьшаться по абсолютной величине, а положительная - возрастать (рассматривая случай, когда по результатам измерения в крайних плоскостях коррекции в осевой плоскости х получаются разнополярные проекции). Одновременно появляютея показания на индиKjTope 35 проекций средней U l ос кости коррекции. В этот момент, когда уровень счг- на.па отрицате,тьной Г1|)оекции стано 5ится меньше по абсо.пютной величине порога срабатывания К(шнараторов, на выходе последнего ноявляется низкнй уровень нанря- ження (;1ОГ1 ческий «О), а на выходе логического элемента 45 - высокий уровень (:югичеекая «1), который закрыва- (г ана;1огов1 1Й ключ 21. Источник 19 ностоян ного тока оказывается отключенным от интегратора 25, и нарастание напряжения положительной полярности на вторых входах сумматоров 29 и 31 нрекращается. В этот момент времени индикатор, который ранее показывал положительную проекцию, покажет сумму абсолютных значений положительной и отрицательной нроекций, а индикатор 35 средней плоскости коррекции - удвоенное значение отрицательной проекции, что соответствует пересчету дисбаланса в крайних плоскостях коррекции на дисбаланс крайняя-средняя плоскости коррекции.
При отсутствии отрицательных значений на индикаторах 33, 34, 37 и 38 на выходе логического элемента 4 ИЛИ-НЕ 50 появляется высокий уровень, который поступает на вход логического элемента 2И 49. По истечении выдержки времени, онределяемой элементом 48 временной задержки и необходимой для измерения параметров дисбаланса, на второй вход логического элемента 2И 49 поступает также высокий уровень, и с выхода логического элемента 2И 49 на вход блока 47 управления пое- гунает команда об окончании измерения пара.метров дисбаланса коленчатого вала. Одновременно снимается команда с выхода блока 47 управления, аналоговые ключи 27 и 28 открываются, разряжая интегратор 25(26), а входы всех индикаторов 33-38 проекций отключаются (эти связи на схеме не показаны), сохраняя показан:;н до следующего цикла балансировки.
Таким образо.м, предлагаемое устройство обеснечиваст повышение точности балансировки коленчатых валов при применении на станке безосевого привода вращения коленчатого вала и возможных при этом колебаниях скорости в процессе вращения за сче 1 |)ормир()ва11ия опорных сигналов для разложения дисбаланса по осям коррекции с помощью бесконтактных датчиков импульсов, распо;1оженных на раме в плоскости вращения 1натунных щеек коленчатого вала при измерении параметров дисбаланса, и формирователей, выполненных на интегральных микросхемах.
Формула изобретения
Измерительное устройство к балансировочному станку по авт. св. № 1096510, отличающееся тем, что, с целью повышения точности онределения параметров дисбаланса, генератор опорных сигналов выполнен в виде четырех датчиков импульсов, первый и
второй из которых предназначены для установки в плоскости вращения первой шатунной шейки коленчатого вала, а третий и четвертый - в плоскости вращения второй п:атунной шейки, четырех формирователей, вход каждого из которых соединен с выходом соответствуюп).его датчика импульсов, и двух триггеров, выходы которых представляют собой выходы генератора опорных сигналов, R-вход первого триггера соединен с выходом первого формирователя, а S-вход - с выходом третьего формирователя, R-вход второго триггера - с выходом второго формирователя, а S-вход - с выходом четвертого формирователя.

| название | год | авторы | номер документа |
|---|---|---|---|
| Измерительное устройство к балансировочному станку | 1987 |
|
SU1415092A1 |
| Измерительное устройство станка для балансировки коленчатых валов | 1990 |
|
SU1714401A1 |
| Измерительное устройство к балансировочному станку | 1982 |
|
SU1096510A1 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1264018A2 |
| Измерительное устройство станка для балансировки коленчатых валов | 1986 |
|
SU1366893A1 |
| Измерительное устройство к балансировочному станку | 1984 |
|
SU1221516A1 |
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1146562A1 |
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1096511A1 |
| Измерительное устройство к балансировочному станку | 1984 |
|
SU1182297A2 |
| Измерительное устройство станка для балансировки коленчатых валов | 1983 |
|
SU1193473A1 |
Изобретение относится к балансировочной технике, может быть использовано в автоматических станках для балансировки коленчатых валов с тремя плоскостями коррекции и является усовершенствованием устройства, по авт. св. № 1096510. Целью изобретения является повышение точности определения параметров дисбаланса, путем исключения погрешности при разложении дисбаланса на проекции, возникающей при колебаниях частоты врашения. При этом генератор опорных сигналов выполнен в виде четырех датчиков импульсов, четырех формирователей, входы которых соединены соответственно с выходами датчиков импульсов, установленных в плоскости врашения первой и второй шатунных шеек коленчатого вала, и двух триггеров, выходы которых являются выходами генератора опорных си на. 1ов, R-вход первого триггера соединен с первым формирователем, а S-вход - с третьим формирователем, R-вход второго триггера - с вторым формирователем, а S-ЕХОД- с четвертым формирователем. 2 ил. S Ев (Л 1чЭ N3 СО 05 to О 
| Измерительное устройство к балансировочному станку | 1982 |
|
SU1096510A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
