(54) ПНЕВМАТИЧЕСКОЕ УСТРОЙСТВО УПРАВЛЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Система связи электронно-вычислительной машины с пневматическими регуляторами | 1980 |
|
SU935876A1 |
| Пневматическая система централизованного контроля и управления агрегатами с непрерывными технологическими процессами | 1981 |
|
SU1043589A1 |
| Пневматическая система централизованного контроля и управления | 1980 |
|
SU1001006A1 |
| Пневматическая система централизованного контроля и управления | 1980 |
|
SU962848A1 |
| Устройство управления пневматическими регуляторами | 1980 |
|
SU881664A1 |
| Система связи электронно-вычислительной машины с пневматическими регуляторами | 1980 |
|
SU953625A1 |
| Пневмоэлектронная система централизованного контроля и управления | 1986 |
|
SU1363135A1 |
| Система связи электронно-вычислительной машины с пневматическими регуляторами | 1985 |
|
SU1341617A1 |
| Устройство для связи управляющего вычислительного комплекса с пневматическими регуляторами | 1983 |
|
SU1163330A1 |
| Автоматизированная система управления производственными процессами | 1973 |
|
SU492852A1 |
Изобретение относится к приборостроению, а именно к пневматическим устройствам управления непрерывными технологическими процессами, и может быть использовано в системах централизованного контроля и управления, построенных на базе пневматических агрегатных комплексов Центр, Центр - Логика и Режим. Известно пневматическое устройство управления, содержащее регуляторы, блоки обнаружения выбегов, индикатор, клапа ны переключения, гнезда вызова, переклк чатели Автомат-Ручное и коммутатор, входы которого соединены с задатчиками номиналов и ручного управления, а выходы с индикаторами 1 . Недостатком известного устройства является то, что при необходимости осуществления переключения локального контура автоматического регулирования с автоматического режима в ручной (дистанодонный) оператор должен предварительно, вращая шток задатчика дистанционного управления, добиться равенства его выходного сигнала выходному сигналу регулятора, а для переключения с ручного рюжима в автоматический оператор должен, вращая щток задатчика номинала, добичься равенства его сигналу параметра - это приводит к снижению уровня оперативности управления, а также к тому, что при переключениях перевод системы регулирования не оказывается безударным из-за того, что контроль выравнивания сигналов осуществляется оператором визуально с помощью двухстрелочного манометра. Наиболее близким к изобретению по технической сущности и достигаемому результату является пневматическое устройство управления, содержащее регуляторы, блоки групповых задатчиков номиналов и ручного управления, выходы которых соединены через коммутатор и соответстБук щие коллекторы с многошкальным показывающим индикатором, переключатели управления блоками групповых задатчиков, блоки обнаружения выбегов и непрерывно-
го контроля, клапана переключения, связанны® с выходами регуляторов и блоков групповых задатчиков ручного управления, кнопки вызова и кнопки переключения на автоматический и ручной режимы, выходы которых соединены через первые элементы И, триггеры, второй элемент И и элемент ИЛИ с сигнализатором 2.
Недостатком известного устройства является то, что при необходимости осущест -вления переключения локального контура автоматического регулирования с автоматического режима в ручной оператор должен предварительно, вращая щток задатчи ка дистанционного управления, добиться равенства его выходного сигнала выходному сигналу регулятора, а для переключения с р5 чного режима в автоматичес кий оператор должен, вращая шток задат- чика номинала, добиться равенства его сигналсу параметра - это приводит к снижению уровня оперативности управления, а также к тому, что при перекгаочениях перевод системы регулирования не оказывается безударным из-ва того, что контроль выравнивания сигналов осуществляется оператором визуально с помощью двух- стрелочного манометра многоканального показывающего индикатора. Цель изобретения - повышение надежности устройства за счет обеспечения безударности переключе гая устройства с режима на режим. Поставленная цегш достигается тем, что в пневматическом устройстве управ- леьшя, содержащем регуляторы, блоки групповых задатчиков номиналов и ручного управления и каналы параметров, подключенные через коммутатор и соответствующие коллекторы к блоку индикаторов, переключатели управления блоками групповых задатчиков номиналов и ручного управления, блоки обнаружения выбего и непрерывного контроля, подключенные к каналам параметров и выходам блока групповых задатчиков номиналов, соединенных с одними входами регуляторов, другие входы которых соединены с каналами параметров, клапан переключения, связанный с выходами регуляторов и выходами блока групповых задатчиков ручно го управления, кнопки вызова и кнопки пе реключения на автоматический и ручной режимы, выходы которых соединены с пер выми входами первых и вторых элементов И, подключенных выходами к входам три гера, связанного с первым входой третье го элемента И, по :ледовательно которому включены элемент ИЛИ и сигнализатор,
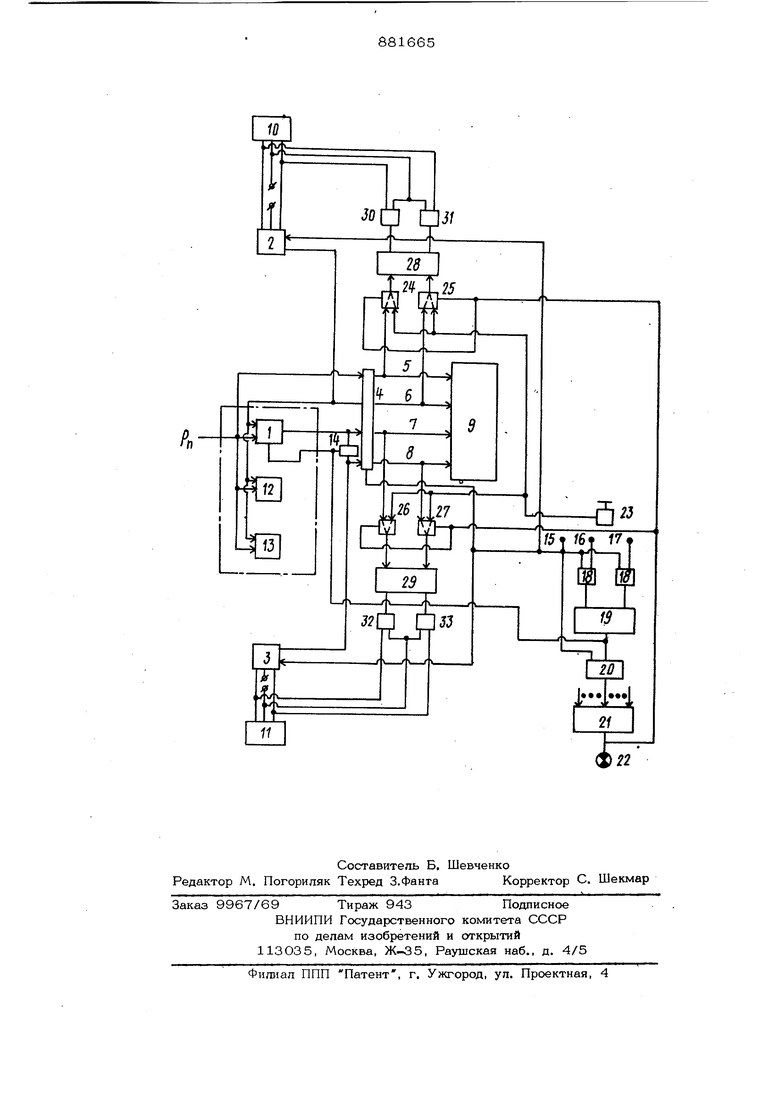
и элементы сравнения, выход триггера соединен с входом клапана переключения и переключающими входами регулягторов, а выход кнопки вызова связан с управляющими входами групповых задатчиков, коммутатора и вторым входом третьего элемента И, установлены задатчик опорного сигнала, реле и пневмоэлектропреобразователи, при этом коллекторы каналов параметров и каналов номиналов подклю- чены к первым входам первого и второго реле, коллекторы каналов подачи давления на исполнительные механизмы и ручного управления подключены к первым входам третьего и четвертого реле, вторые входы реле подключены к выходу за- датчика опорного сигнала, выходы первого и второго реле и. третьего и четвертого реле соединены попарно с входами первого и второго элементов сравнения, выходы которых через пневмоэлектропреобразователи связаны со входами управления блоков групповых задатчиков, причем управляющие входы реле соединены с вы- ходом элемента ИЛИ. На чертеже представлена принципиальная схема пневматического устройства . управления, Устройство содержит регуляторы 1, блоки групповых задйтчиков номиналов 2 и ручного управления 3, выходы которых соединены через коммутатор 4 и коллекторы каналов параметров 5, номиналов 6, каналов.подачи давления на исполнительные механизмы 7 и ручного управления 8 с блоком индикаторов -многошкальным показывающим индикатором 9, переключатели управления 10и 11 -с блоками групповых задатчиков, блоки обнаружения 1.2. vi. непрерывного контроля 13, клапаны переключения 14, связанные с выходами регуляторов 1 и блоком групповых задатчиков ручного управления 3, кнопки вызова 15 и переключения на автоматический 16 и ручной 17 режимы, первый и второй элементы И 18, триггер 19, третий элемент И 2О, элементьгИЛИ 21, сигнализатор 22, задатчик опорного сигнала 23, реле 24-27, соединенные через элементы сравнения 28 и 29 с пневмоэлектро- преобразователями 30-33, при этом управ- ляющие входы реле 24-27 соединены с выходом элемента ИЛИ 21. Пневматическое устройство управления работает следующим образом. Сигналы от датчиков технологических параметров, расположенных на объекте, поступают через каналы параметров Р на регуляторы 1 -(на чертежо локазан один
58
регулятор) коммутатор 4, блок обнаружения выбегов 12 и блок непрерывного контроля. Сигналы заданий (номиналы) вырабатываются Б блоке групповых задатчиков 2 и поступают на регуляторы 1, комму татор 4 и блок обнаружения выбегов 12. В блоке обнаружения выбегов 12 происходит непрерывное сравнение параметров с соответствующими номиналами, при существенном отклонении параметра от номинала происходит срабатывание блока обнаружения выбегов 12, который формирует сигнал отклонения на мнемосхему технологического процесса (на чертеже не показана). Блок непрерывного контроля 13 непрерывно регистрирует значения важ- нейщих технологических параметров, а также значения вспомогательных параметров по вызову оператора. Блок групповых задатчиков 3 формирует сигналы ручного (дистанционного) управления, поступающие на входы клапанов переключения 14 (на чертеже показан один клапан) и коммутатор 4. Выходной сигнал регулятора 1 также поступает на входы клапана переключения 14 и коммутатора 4. Вызов любого из контролируемых параметров и связанных с ним сигналов, характеризующих состояние регулируемого контура, осуществляется оператором путем нажатия на соответствующую кнопку вызова 15 (на чертеже показана одна кнопка), при этом срабатывает коммутатор 4, пропуская контролируемые сигналы в соответствующие коллекторы каналов параметра 5, номинала 6, подачи давления на исполнительном механизме 7 и ручного управления 8 и далее на вход многошкального показывающего прибора 9.
Одновременно сформированный кнопкой вызова 15 сигнал поступает на блоки групповых задатчиков 2 и 3, тем самым при включении переключателей управления 10 или 11, с помощью которых обеспечивается вращение реверсивных электродвигателей блоков групповых задатчиков, происходит вращение щтока задатчика номинала (или ручного управления) той точки, которая контролируется оператором.
Режим функционирования контура автоматического регулирования задается оператором путем нажатия на кнопки переключения на автоматическом 16 и ручном 17 режимах, выходные сигналы которых собираются по схеме Н с выходными сигналами кнопок вызова 15 на элементах И 18, выходные сигналы последних поступают на входы триггера 19, выходные сигналы которого (О или 1) подаются
656
на управляющие входь регулятора 1 и клапана переключения 14. При значении выходного сигнала триггера 19, равном О, регулятор 1 открыт, а клапан пере
ключения 14 - закрыт, в результате выходной сигнал регулятора 1 коммутирует ся в линию исполнительного механизма (на чертеже не показана). При значении выходного сигнала триггера 19, равном
1, регулятор 1 закрыт, а клапан переключения 14 - открыт, в результате выходной сигнал соответствующего задатчи- ка ручного управления блока групповых задатчиков 3 поступает через клапан переключения 14 в линию подачи давления на исполнительный механизм. Одновременно выходной сигнал триггера 19 собирается с выходным сигналом кнопки вызова 15 по схеме И на элементе И 2О, выход которого через элемент ИЛИ 21 подается на сигнализатор 22, информирующем оператора при вызове любой точки в каком режиме (автоматическом или ручном) находится контролируемый контур.
Выходной сигнал элемента ИЛИ 21,
кроме того подается на управляющие входы реле 24-27, в случае, если он равен О (т.е. контролируемый в настоящий момент с помощью кнопки вызова 15 кон-
тур регулирования находится в автоматическом режиме), то реле 24 к 25 ском- мутируют на оба входа элемента сравнения 28 опорный сигнал задатчика 25, а реле 26 и 27 скоммутируют на входы
элемента сравнения 29 сигналы давления на исполнительном механизме и ручного управления из коллекторов 7 и 8 соответ ственно. В случае, если сигнал ручного управления равен сигналу давления на ис
полните льном механизме, то на обоих выходах элемента сравнения 29 формируется нулевой сигнал, если сигнал ручного управления болыие или меньще сигнала давления на исполнительном механизме,
то на соответствующем выходе элемента сравнения формируется сигнал 1. ПоследНИИ поступает в один из пневмопреобразо вателей 32 или 33, обеспечивая его срабатывание, при этом замыкается нормально разомкнутый электрический контакт пневмоэлектропреобразоватепя и, в результате, замыкается электрическая цепь питания реверсивного электродвигателя блока групповых задатчиков 3 (при срабатывании пневмоэлектропреобразователя 32 электродвигатель вращается по часовой стрелке, при срабатывании пневмоэлектро- преобразователя 33 - против часовой стрелки). Таким образом, обеспечивается вращение электродвигателя блока групповых эадатчпков 3 и штока задатчика руч ного управления контролируемого кбнтура в ГУ или другую сторону до того момента, пока сигнал ручного управления не станет равным сигналу давления на испол нительном механизме. После этого оператор при необходимости нажатием на кнопку 17 может перевес ти контур регулирования в ручной .режим причем перевод осуществляется безударным путем. В случае, если вызванный оператором с помощью кнопки вызова 15 контур регулирования окажется в ручном режиме (выходной сигнал элемента ИЛИ 21 равен 1)/реле 26 и 27 скоммутируют на оба входа элемента сравнения 29 опор ный сигнал задатчика 23 , а реле 24 и 25 скоммутируют .на входы элемента сра ненкя 28 сигналы параметра и номинала из коллекторов 5 и 6, соответственно. В случае равенства сравниваемых сигналов выходные сигналы элемента сравнения 28 будут иметь нулевые значения. В слу чае, если номинал окажется больше или меньше параметра на одном из выходов элемента сравнения 28 появится сигнал, равный 1, что приведет к срабатыванию соответствующего пневмоэлектропреобра« зоватепя ЗО ил1-1 31. При этом замкнется электрическая цепь питания реверсивного электродвигателя блока групповых задатчиков 2, обеспечивая тем самым вращение электродвигателя и штока задатчика номинала контролируемого контура в ту иш иную сторону. Вращение будет продол жаться до того момента пока сигналы па раметра и номинала не сравняются, после чего оператор в случае необходимости нажатием на кнопку перекгаочения Авто- мат переводит контролируемый контур Б автоматичес1снй режим, причем перевод будет осуществлен безударным путем. Применение данного устройства позвопит повысить производительность труда операторов и качество регулирования за счет обеспечения безударности переключе ния контуров регулирования. ормула изобретения Пневматическое устройство управле- ния, содержащее регуляторы, блоки групповых задатчиков номиналов и ручного управления и каналы параметров, подкгао- ченные через коммутатор и соответствующие коллекторы к блоку индикаторов, переключатели управления блоками групповых задатчиков номиналов и ручного управления, блоки обнаружения выбегов и непрерывного контроля, подключенные к каналам параметров и выходам блока групповых задатчиков номиналов, соединенных с одними входами регуляторов, другие входы которых соединены с каналами параметров, клапан переключения, связанный с выходами регуляторов и выходами блока групповых задатчиков ручного управления, кнопки вызова и кнопки переключения на автоматический и ручной режимы, выходы которых соединены с первыми входами первого и второго элементов И, подключенных выходами к входам триггера, связанного с первым входом третьего элемента И, последовательно которому включены элемент ИЛИ и сигнализатор, и элементы сравнения, выход триггера соединен с входом клапана переключения и переключающими входами регуляторов, а выход кнопки вызова связан с управляющими входами групповых задатчиков, коммутатора и вторым входом третьего элемента И-, отличающееся тем, что, с целью повышения надежности устройства, в нем установлены задатчик опорного сигнала, реле и пневмоэпектропреобразовате- ли, при этом коллекторы каналов параметров и 1 аналов номиналов подключены к первым входам первого и второго реле, коллекторы каналов подачи давления на исполнительные механизмы и ручного управления подключены к первым входам третьего и четвертого репе, вторые входы реле подключены к выходу задатчика опорного сигнала, выходы первого и второго реде и третьего и четвертого репе соединены попарно с входами первого и второго элементов сравнения, выходы которых через пневмдапектропреобразоватепи связаны со входами управления блоков групповых задатчиков, причем управтшющие входы реле соединены с выходом элемента ИЛИ. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетепьство СССР № 492852, кп. G 05 В 11/58, 1973. 2.Авторское свидетельство СССР № 705419, кп. G 05 В 11/58, 1977 (прототип).
