ления, трехпозиционные переключатели 5, первый, второй, третий и четвертый коммутаторы 23-26, аналоговые пневмоэлектропреобразователи 15, каналы ввода и вывода дискретной информации 18 и 20, двухпозиционные переключатели 3, три группы элементов И 9-11, пневмоэлектрические переключатели с контактами 12 в цепях управления моторными задатчиками 13, В каждом контуре регулирования выходы двухпозиционных 3 и трехпозицион- ных переключателей 5 связаны через первый элемент И 9 с каналом ввода дискретной информации 18 управляющей вычислительной машины и управляющими
1
Изобретение относится к техническим средствам управления и может быть использовано в АСУ ТП нефтеперерабатывающих производств, химической технологии, пищевой промыщленности,
Цель изобретения - повьшение быстродействия и точности.
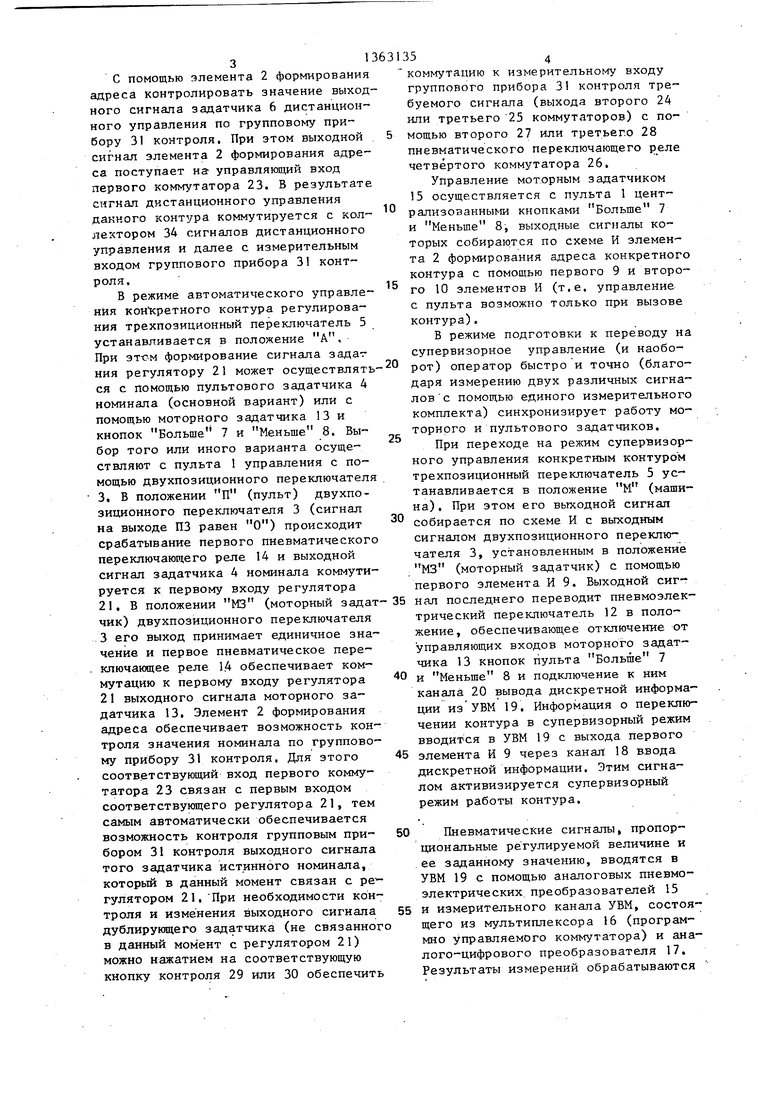
На чертеже представлена принципи-. альная схема системы централизованного контроля и управления с одним контуром регулирова ния.
Система содержит пульт 1 управления, снабженный для каждого контура регулирования элементом 2 формирования адреса, двухпозиционным переключателем 3, задатчиком 4 номиналов, трехпозиционным переключателем 5, задатчиком 6 дистанционного управления, централизованными (общими для всех kpHTypoB регулирования) кнопками Больше 7 и Меньше 8, а также для каждого контура первый, второй и третий элементы И 9, 10 и 11, пневмоэлектрический переключатель 12, установленный в управляющей цепи моторного задатчика 13 (состоящего из реверсивного электродвигателя, вал которого кинематически связан с приводом пневматическо- кого задатчика), первое пневматическое переключающее реле 14 и аналоговые пневмоэлектропреобразователи 15,
Измерительный канал состоит из мультиплексора 16 и аналого-цифрового
входами пневмоэлектрических переключателей 12, коммутирующие входы которых связаны с выходами второго и третьего элементов И 10 и 11 и каналом вывода 20 дискретной информации из управляющей вычислительной машины, выходы двухпозиционных переключателей 3 соединены с управляющими входами первых пневматических пере- . ключаю1гщх реле 14, а управляющие входы второго и третьего элементов , И 10 и 11 связаны с централизованными кнопками управления 7 и 8 и выходом элемента 2 формирования адреса . 1 ил ,
преобразователя 17,.канала 18 ввода дискретной информации в управлякнцую вычислительную машину (УВМ) 19, ка- |нала 20 вывода дискретной информа- 5ЦИИ, входящих в контур регулирова- ния регулятора 21 и клапана 22, общего первого коммутатора 23, второго коммутатора 24, Третьего коммутатора 25, четвертого коммутатора 26,
0 содержащего второе и третье пневматические переключающие реле 27 и 28, первую кнопку 29 контроля, вторую кнопку 30 контроляi прибор 31 груп- повйго. контроля, коллектор 32 номи- .
5 нала, коллектор 33 параметра, коллектор 34 сигналов дистанционного управления, коллектор 35 сигналов на исполнительные механизмы, канал 36 на исполнительный механизм и
0 канал 37 параметра от датчика.
Система централизованного контроля и управления работает следующим образом,
5 В режиме дистанционного (ручного) управления конкретного контура регулирования трехпозиционный переключатель ,5 устанавливается в поло- жение Р, При этом его выходной
0 сигнал отключает регулятор 21 и открывает клапан 22, В результате выходной сигнал задатчика 6 дистанционного управления коммутируется в канал 36 на исполнительный механизм.
31
с помощью элемента 2 формирования адреса контролировать значение выходного сигнала задатчика 6 дистанционного управления по групповому прибору 31 контроля. При этом выходной сигнал элемента 2 формирования адреса поступает на управляющий вход первого коммутатора 23. В результате сигнал дистанционного управления данного контура коммутируется с коллектором ЗА сигналов дистанционного управления и далее с измерительным входом группового прибора 31 контроля.
В режиме автоматического управления кон ретного контура регулирования трехпозиционный переключатель 5 устанавливается в положение А, При эт-см формирование сигнала задат ния регулятору 21 может осуществлять ся с помощью пультового задатчика 4 номинала (основной вариант) или с помощью моторного задатчика 13 и кнопок Больше 7 и Меньше 8. Выбор того или иного варианта осуществляют с пульта 1 управления с помощью двухпозиционного переключателя 3, В положении П (пульт) двухпозиционного переключателя 3 (сигнал на выходе ПЗ равен О) происходит срабатывание первого пневматического переключающего реле 14 и выходной сигнал задатчика А номинала коммутируется к первому входу регулятора 21, В положении МЗ (моторный задат чик) двухпозиционного переключателя 3 его выход принимает единичное значение и первое пневматическое переключающее реле 1А обеспечивает коммутацию к первому входу регулятора 21 выходного сигнала моторного за- датчика 13. Элемент 2 формирования адреса обеспечивает возможность контроля значения номинала по групповому прибору 31 контроля. Для этого соответствующий вход первого коммутатора 23 связан с первым входом соответствующего регулятора 21, тем самым автоматически обеспечивается возможность контроля групповым при- бором 31 контроля выходного сигнала того задатчика истинного номинала, который в данный момеит связан с ре - гулятором 21, При необходимости контроля и изменения выходного сигнала дублирующего задатчика (не связанног в данный момент с регулятором 21) можно нажатием на соответствующую кнопку контроля 29 или 30 обеспечить
5
5
31
5
5 5 0 55
354
коммутацию к измерительному входу группового прибора 31 контроля требуемого сигнала (выхода второго 24 или третьего 25 коммутаторов) с помощью второго 27 или третьего 28 пневматического переключающего реле четвёртого коммутатора 26.
Управление моторным задатчиком 15 осуществляется с пульта 1 централизованными кнопками Больше 7 и Меньше 8, выходные сигналы которых собираются по схеме И элемента 2 формирования адреса конкретного контура с помощью первого 9 и второго 10 элементов И (т.е. управление с пульта возможно только при вызове контура).
В режиме подготовки к переводу на супервизорное управление (и наоборот) оператор быстро и точно (благодаря измерению двух различных сигналов с помощью единого измерительного комплекта) синхронизирует работу моторного и пультового задатчиков.
При переходе на режим супервизор- ного управления конкретным контуром трехпозиционный переключатель 5 устанавливается в положение М (машина) . При этом его выходной сигнал собирается по схеме И с выходным сигналом двухпозиционного переключателя 3, установленным в положение МЗ (моторный задатчик) с помощью первого элемента И 9. Выходной сигнал последнего переводит пневмоэлек- трический переключатель 12 в положение, обеспечивающее отключение от управляющих входов моторного задат- чика 13 кнопок пульта Больше 7 и Меньше 8 и подключение к ним канала. 20 вывода дискретной информации из УВМ 19. Информация о переключении контура в супервизорный режим вводится в УВМ 19 с выхода первого элемента И 9 через канал 18 ввода дискретной информации. Этим сигналом активизируется супервизорный режим работы контура.
Пневматические сигналы, пропорциональные регулируемой величине и ее заданному значению, вводятся в УВМ 19 с помощью аналоговых пневмо- электрических преобразователей 15 и измерительного канала УВМ, состоящего из мультиплексора 16 (программно управляемого ком :утатора) и аналого-цифрового преобразователя 17, Результаты измерений обрабатываются
в соответствии с заданной программо формирования управляющего воздействия изменения задания соответствующему регулятору 2.
По сравнению с прототипом время подготовки сокращается с 30-60 с до 5-10 с, а скачок давления в канале номинала при переключениях режимо уменьшается с 1,5 - 2,0% до 0,5%. Благодаря этому обеспечивается повышение быстродействия и улучшение точности системы в целом. /
Формула изобретения
Пневмоэлектронная система централизованного контроля и управления, содержащая регуляторы, моторные за- датчики, управляющую вычислительную машину, прибор группового контроля, клапаны, первую и вторую кнопки контроля, первые-пневматические переключающие реле, элементы формирования адресов, задатчики номиналов, задат- чики дистанционного управления, трех позициойные переключатели, первый, второй, третий и четвертый коммутато ры, аналоговые пневмоэлектропреобра- зователи, устройства ввода и вывода дискретной информации, причем,в каждом контуре регулирования выхо за- датчика дистанционного управления связан через клапан с выходом на исполнительный механизм, выходу задат- чика номинала и моторного задатчика связаны с входами первого пневматического переключающего реле, выход которого связан с первым входом регулятора -данного контура и одним из первых входов первого коммутатора, выход каждого задатчика номинала соединен- с одним из входов третьего, а выход каждого моторного задатчика с одним из первых входов второго коммутаторов, управляющие входы первого, второго и третьего коммутаторов связаны с выходами элементов формирования адреса, выходы первого коммутатора соединены через коллекторы параметра, сигналов дистанционного управления и сигналов к исполнительным механизмам с входами группового прибора контроля, выход перво
ВНИИПИ Заказ 6361/37 Тираж 863 Подписное Произв.-полигр, пр-тие, г. Ужгород, ул. Проектная, 4
5
5 л
5
0
5
го коммутатора через коллектор номинала и выходы второго и третьего коммутаторов связаны с входами четвертого коммутатора, управляющие входы которого соединены с выходами первой и второй кнопок контроля, а выход - с одним из входов группового прибора контроля, канал параметра связан с вторым входом соответствую- Diero регулятора и одним из вторых входов первого коммутатора, выход каждого регулятора соединен с каналом на исполнительный механизм и одним из третьих входов первого коммутатора, выход каждого задатчика дистанционного управления связан с,одним из четвертых входов первого коммутатора, выход первого переключающего реле и к анал параметра соединены через аналоговые пневмоэлектро- преобразователи с измерительным каналом управляющей вычислительной машины, каналы ввода и вывода дискретной информации, отличающаяся тем, что, с целью повышения быстродействия и точности, в ней установлены централизованные кнопки управления моторными задатчиками и в каждый контур регулирования введены двухпозиционный переключатель, первый, второй и третий элементы И, пневмозлектрический переключатель с контактами в цепи управления моторными задатчиками, причем выходы двухпозиционного и трехпозиционного переключателей связаны с входами первого элемента И, выход которого соединен с каналом ввода дис кретной информации в управляющую вычислительную машину и управляющим входом пнев- моэлектрическоГо переключателя, коммутирующие входы которых связаны с выходами второго и третьего элемента И и каналом вывода дискретной информации из удравляющей вычислительной машиныf выходы каждого двухпозиционного переключателя соединены с управляющим входом первого пневматического переключающего реле, а входы второго и третьего элементов И связаны с централизованными кнопками управления и выходом соответствующего элемента формирования адреса.

| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматическое устройство управления | 1980 |
|
SU881665A1 |
| Система связи электронно-вычислительной машины с пневматическими регуляторами | 1980 |
|
SU935876A1 |
| Пневматическая система регулирования | 1987 |
|
SU1492344A1 |
| Автоматизированная система управления производственными процессами | 1973 |
|
SU492852A1 |
| Пневматическая система централизованного контроля и управления | 1980 |
|
SU1001006A1 |
| Система связи электронно-вычислительной машины с пневматическими регуляторами | 1980 |
|
SU953625A1 |
| Пневматическое устройство централизованного каскадного управления | 1977 |
|
SU705419A1 |
| Устройство для задания и дистанционного управления производственными процессами | 1973 |
|
SU477391A1 |
| Система связи электронно-вычислительной машины с пневматическими регуляторами | 1985 |
|
SU1341617A1 |
| Пневматическая система централизованного контроля и управления | 1980 |
|
SU962848A1 |
Изобретение относится к техническим средствам автоматизации и мо- жет бытн использовано в АСУ ТП нефтеперерабатывающих и химических производств. Цель изобретения - повышение быстродействия и точности - достигается введением новых блоков и функциональных связей. Система содержит регуляторы 21, управляющую вычислительную машину 19, прибор 31 группового контроля, клапаны 22, первую и вторую кнопки контроля 29 и 30, первые пневматические переключающие реле 14, элементы 2 формиро- .вания адресов, задатчйки номиналов 4, задатчйки 6 дистанционного управт Ё (Л со О) со со СП
| Устройство для управления контуром регулирования | 1972 |
|
SU446030A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Склярский Э | |||
| И | |||
| и др | |||
| Системы централизованного контроля и управления на базе пневмоэлектронных комплексов | |||
| М.: ЦНИИТЭИНефтехим, 1983, с | |||
| Способ использования делительного аппарата ровничных (чесальных) машин, предназначенных для мериносовой шерсти, с целью переработки на них грубых шерстей | 1921 |
|
SU18A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
