Изобретение предназначено для управления асинхронизированным синхронным компенсатором (АСК), приме- няемым для компенсации колебаний частоты и модуля напряжения местной электрической системы ограниченной мощности, осуществляющей электроснабжение предприятий, содержащих электроприемники с резкопеременной активной и реактивной нагрузками.
АСК может применяться в системе электроснабжения металлургических предприятий, в частности прокатных станов 11, 2, 3 и 4.
Известные устройства настраиваются на определенный, заранее установленный уровень потребления как реактивной, так и активной мощности, т.е. на точную компенсацию колебаний как модуля, так и частоты напряжения в узле нагрузки.
При этом, в отличие от колебаний модуля напряжения, зависящих от величины колебаний реактивной мощности , колебания частоты могут зависеть не столько от величины, сколько от скорости изменения активной мощности 4.
В связи с этим устройства для компенсации колебаний частоты
быть разделены на два типа. Устройства первого типа рассчитываются на точную компенсацию изменений активной мощности в узле нагрузки с применением регулятора тока, настроенного на постоянный (средний ) уровень активного тока в узле нагрузкиС1, 2 и Ua. , г п
Недостатком устройств -Ч)
10 и З является завышение установленной мощности АСК в условиях нерегулярных изменений активной мощности, что характерно, например, для прокатных станов непрерывной прокатки.
15
Устройство второго типа рассчитываются на уменьшение скорости изме нения активной мощности в узле нагрузки 4. .,
Наиболее близким к предлагаемому
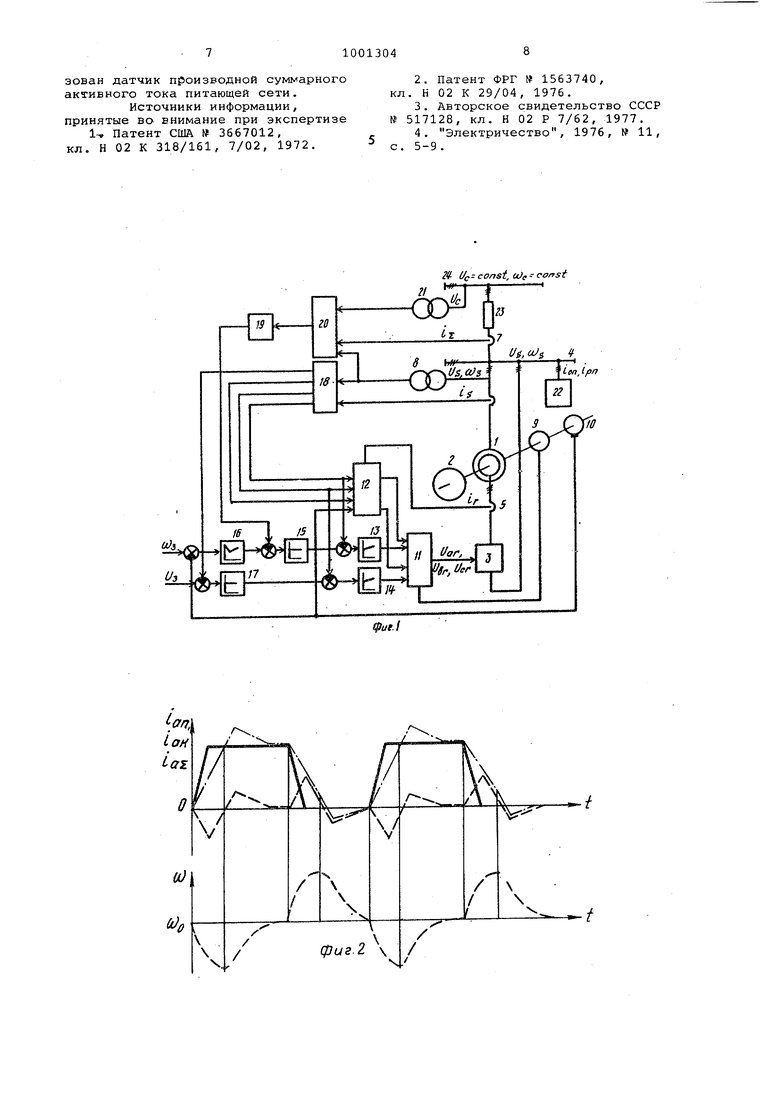
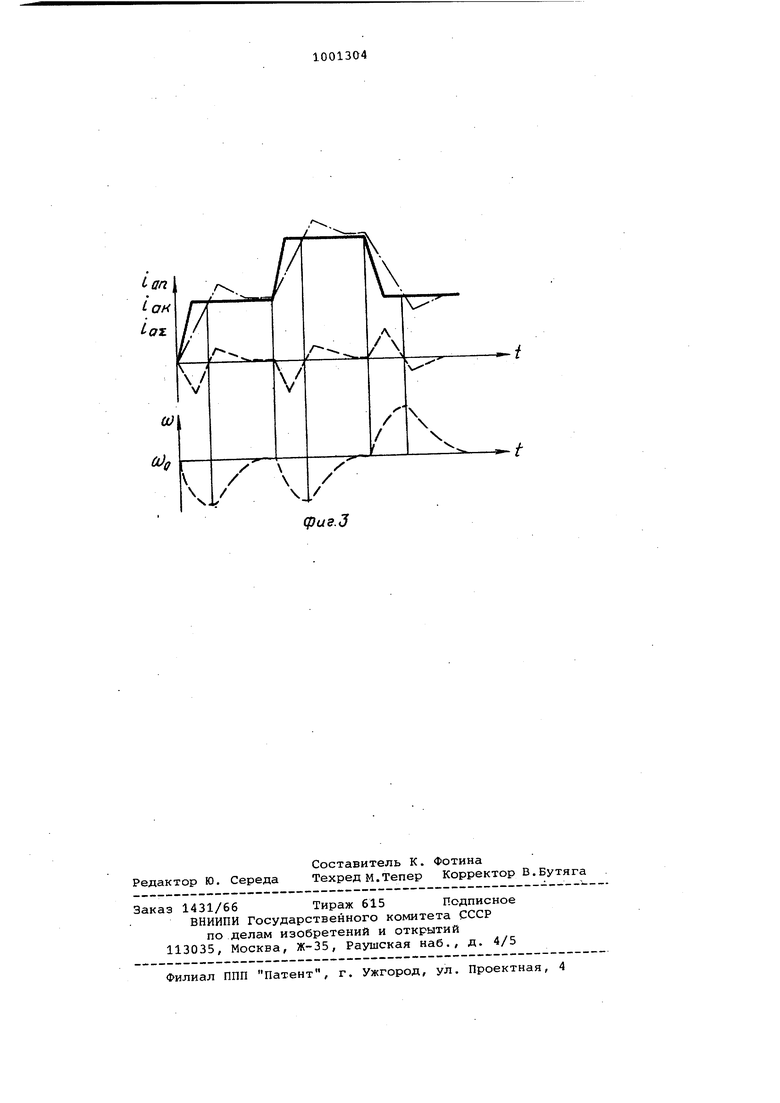
20 является устройство для управления АСК, содержащее регулируемый источник питания ротора, датчик углового положения ротора относительно синхронно вращающейся системы коор25динат, датчик частоты вращения, связанный с входом обратной связи регулятора частоты вращения, блок прямого преобразования координат, входы которого соединены с датчиками фазных токов и напряжений статора АСК,а выходы соединены с входами о ратной связи соответствено регулят ров активного и реактивного тока, блок обратного преобразования коор динат--, входы которого соединены с выходами регуляторов активного и реактивного тока и блока перекрест ных обратных связей и прямого преЬбразования координат, входы которого соединены с датчиком токов фа ротора, датчиком частоты вращения и выходами блока прямого преобразо вания координат . Недостатком этого устройства яв ляется статическая зависимость час тоты вращения от нагрузки, вследст вне чего устройство может работать без ограничений только при одинако вых значениях времени наброса нагр ки и времени паузы. При уменьшении паузы АСК не будет успевать разгоняться до максимальной частоты вра щения, следовательно, не будет запасать достаточно активной мощности для компенсации последующ,ик наб росов активной мощности. Положение усугубляется при ступенчато нарастающем графике нагрузки. Накопление статической ошибки приводит к ограничению компенсирую щей способности АСК, либо к завыше установленной мощности оборудования. Цель изобретения - повышение эф фективности стабилизации частоты питающей сети при нерегулярных изменениях нагрузки. Поставленная цель достигается тем, что в устройстве для управления асинхронизированным синхронным компенсатором, содержащем регулиру мьтй источник питания ротора, датчик углового положения ротора относительно синхронно вращающейся системы координат, датчик частоты вращения, связанный с входом обратной связи регулятора частоты вращения, блок прямого преобразования координат, входы которого соединены с датчиками фазных токов и напряжений статора асинхронизированного синхронного компенсатора, а выходы соединены с входами обратной связи соответственно регуляторов активного и реактивного токов, блок обратного преобразования координат, входы которого соединены с выходами регуляторов активного и реактивного токов и блока перекрестных обратных связей и прямого преобразования координат, входы которого сое динены с датчиком токов фаз ротора, датчиком частоты вращения и выходами блока прямого преобразования координат, регулятор частоты вращения выполнен астатическим и в устройство введены датчик и регулятор отклонения частоты питающей сети, причем выход регулятора отклонения частоты соединен с задающим входом регулятора активного тока, задающий вход регулятора отклонения частоты соединен с выходом регулятора частоты вращения, вход обратной связи регулятора отклонения частоты соединен с выходом датчика отклонения частоты. При этом в качестве датчика отклонения частоты питающей сети использован датчи.к производной суммарного активного тока питающей сети. На фиг. 1 изображена функциональная схема устройства; на фиг. 2 графики переходных процессов активных токов АСК, нагрузки, системы, а также частоты вращения АСК при циклических набросах-сбросах нагрузки; на фиг. 3 - графики переходных процессов активных -токов АСК, нагрузки, системы, а также частоты вращения АСК при ступенчатых набросах нагрузки. Устройство (фиг. 1) содержит асинхронизированную синхронную машину 1, маховик 2 на ее валу, регулируемый источник 3 питания ротора машины, статор машины и регулируемый источник 3 подключены к шинам местной электрической системы 4. В цепях ротора и статора машины установлены датчик 5 фазных токов ротора и датчик б фазных токов статора, а в питающей линии - датчик 7. фазных суммарных токов. Напряжение статора машины измеряется датчиком 8 фазных напряжений статора. На валу машины имеются датчик 9 положения ротора и датчик 10 частоты вращения. Блок 11 обратного преобразования координат соединен с управляющим входом регулируемого источника 3 питания ротора, входы блока 11 обратного преобразования координат соединены с выходами блока 12 перекрестных обратных связей и прямого преобразования координат, выходом регулятора 13 активного тока и выходом регулятора 14 реактивного тока, а также с датчиком 9 положения ротора. Регулятор 15 отклонения частоты питающей сети выходом соединен с задающим входом регулятора 13 активного тока, вход регулятора 15отклонения частоты питающей сети соединен с выходом регулятора 16частоты вращения, задающий вход регулятора 16 частоты вращения соединен с задатчиком частоты вращения Ша г а вход обратной связи соединен с датчиком 10 частоты вращения. Регулятор 17 напряжения выходом соединен с регулятором 14 реактивного тока. Вход обратной связи регулятора 17 напряжения соединен с выходом блока 18 прямого преобразования координат, выходы которого соединен с входами блока 12 перекрестных обратных связей и прямого преобразования координат, входами регуляторов 13 активного тока и 14 реактивкого тока. Входы блока 12 перекрест ных обратных связей и прямого преобразования координат соединены с датчиками 5 фазных токов ротора и датчик 10 частоты вращения. Входы блока 18 прямого преобразования координат соединены с датчиками 6 фазных токов статора и датчика 8 фазных напряжений статора. Датчик 19 отклонения частоты питающей сети соединен выходом с входом обратной связи регулятора 15 отклонения частоты питающей сети, а вход датчика 19 соединен с выходом блока 20 измерения, входы которого соединены с датчиками 7 фазных суммарных токов, с датчиком 8 фазных напряжений статора и датчика 21 напряжения. Потребитель 22 активной и реактивной мощности соединен линией 23 электропередачи, включающей трансфо маторы и т.п. реактивные элементы с шинами 24 мощной электрической системы . Устройство работает следующим образом. При резком изменении активного тока потребителя на выходе датчика 19 отклонения частоты появляется сигнал, пропорциональный отклонению частоты или производной суммарного активного тока, усиливаемый регулятором 15 отклонения частоты питающей сети. При подаче этого сигнала на регулируемый источник 3 питания ротора, АСК генерирует импульс актинной составляющей тока, частично компенсирующий ток потребителя. В результате компенсации суммарный активный ток нарастает менее интен сивно, чем ток потребителя, следова тельно, отклонение частоты питающей сети уменьшается. Генерирование активного тока про исходит за счет, активной мощности, накопленной в маховых массах ДСК, при этом ротор АСК замедляется. Астатический регулятор частоты вращения, например, ПИД-типа форми рует сигнал, пропорциональный производной -скольжения, скольжению и интегралу скольжения. Совместное действие регуляторов отклонения частоты питающей сети и ча.стоты .вр щения приводит к восстановлению час тоты вращения до синхронной за сче потребления компенсатором активног тока из сети. Расчеты и результаты моделирования показывают, что ампл туда генерируемого импульса тока с щественно больше амплитуды потребл мого тока АСК, а интенсивность изменения потребляемого тока суи ественно меньше, чем генерируемого. Вследствие этого наибольшее влияние на нижение колебаний частоты оказывает передний фронт импульса активного тока АСК. При сбросе нагрузки процессы аналогичны. При чередовании сбросов-набросов нагрузки АСК реагирует на каждое изменение нагрузки (фиг, 2). При ступенчатом характере нагруз-ки АСК также реагирует на каждое изменение активной нагрузки, а в установившемся режиме нагрузки частота вращения АСК восстанавливается до синхронной (фиг. 3). Формула изобретения .1. Устройство для управления асинхронизированным синхронным компенсатором, содержащее регулируемый источник питания ротора, датчик углового положения ротора относительно синхронно вращающейся системы координат, датчик частоты вращения, связанный с входом обратной связи регулятора -частоты вращения, блок прямого преобразования координат, входы которого соединены с датчиками фазных токов и напряжений статора асинхронизированного синхронного компенсатора, а выходы соедине :ы с входами обратной связи соответственно регуляторов активного и реактивного токов, блок обратного преобразования координат, входы которого соединены с выходами регуляторов активного и реактивного токов и блока перекрестных обратных связей и прямого преобразования координат , входы которого соединены с датчиком токов фаз ротора, датчиком частоты вращения и выходами блока прямого преобразования координат, отличающееся тем, что, с целью повышения эффективности стабилизации частоты питающей сети при нерегулярных изменениях нагрузки , регулятор частоты вращения выполнен астатическим, и в устройство введены датчик и регулятор отклонения частоты питающей сети, причем выход регулятора отклонения частоты соединен с задающим входом регулятора активного тока, задающий вход регулятора отклонения частоты соединен с выходом регулятора частоты вращения, вход обратной связи регулятора отклонения частоты соединен с выходом датчика отклонения частоты. 2. Устройство по п. 1, о т л ичающееся тем, что в качестве датчика отклонения частоты использован датчик производной суммарного активного тока питающей сети. Источники информации, принятые во внимание при экспертизе
1- Патент США 3667012, кл. Н 02 К 318/161, 7/02, 1972.
2.Патент ФРГ № 1563740, кл. К 02 К 29/04, 1976.
3.Авторское свидетельство СССР № 517128, кл. Н 02 Р 7/62, 1977.
4. Электричество, 1976, № 11, с. 5-9.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система электроснабжения узла нагрузки | 1981 |
|
SU1103324A1 |
| Устройство для управления асинхронизированной синхронной машиной | 1980 |
|
SU877765A1 |
| Устройство для управления асинхронизированной синхронной машиной | 1985 |
|
SU1288885A1 |
| Устройство для управления асинхронизированной синхронной машиной | 1980 |
|
SU904178A1 |
| Энергосистема | 1979 |
|
SU817856A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1976 |
|
SU614511A1 |
| Устройство для управления электрической машиной с фазным ротором | 1977 |
|
SU720652A1 |
| Устройство для управления электроприводом переменного тока | 1977 |
|
SU738090A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АСИНХРОНИЗИРОВАННЫМ СИНХРОННЫМ ГЕНЕРАТОРОМ | 2000 |
|
RU2189105C2 |
| Электропривод с асинхронной машиной с фазным ротором | 1977 |
|
SU1100703A1 |
U. const ti)e-const И
ЧЗЭТ:
r
Ui,(i,
Y Jen, Ipn
- is
W
