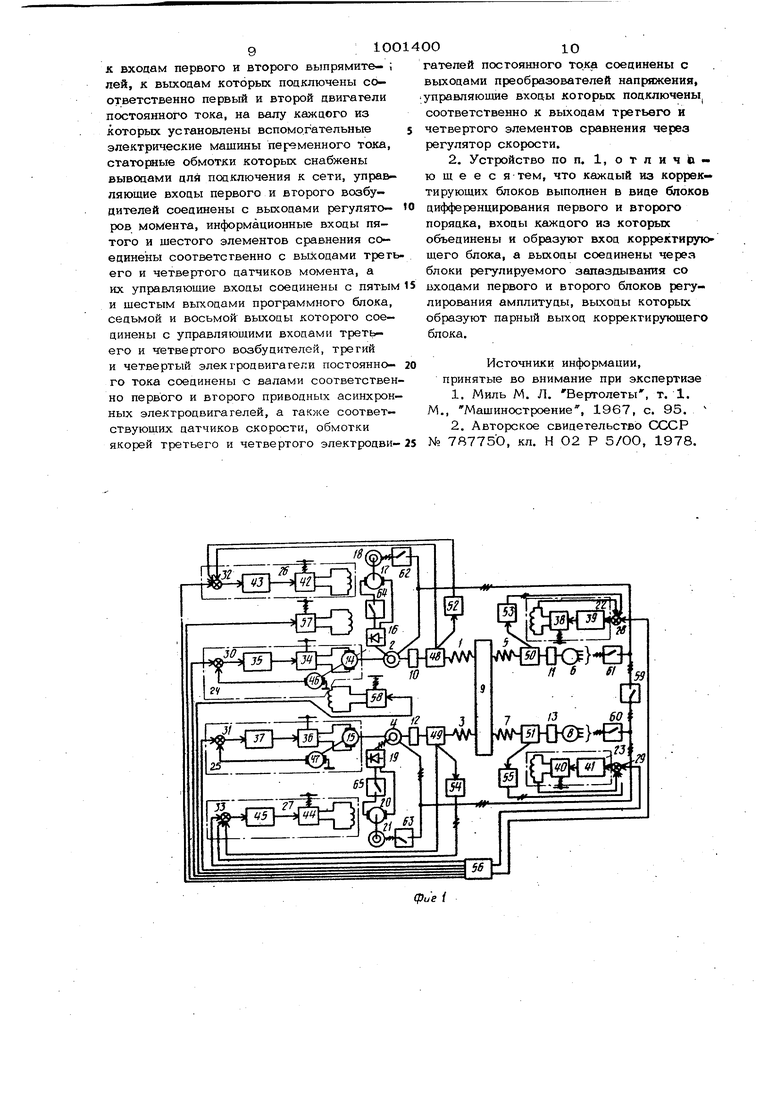
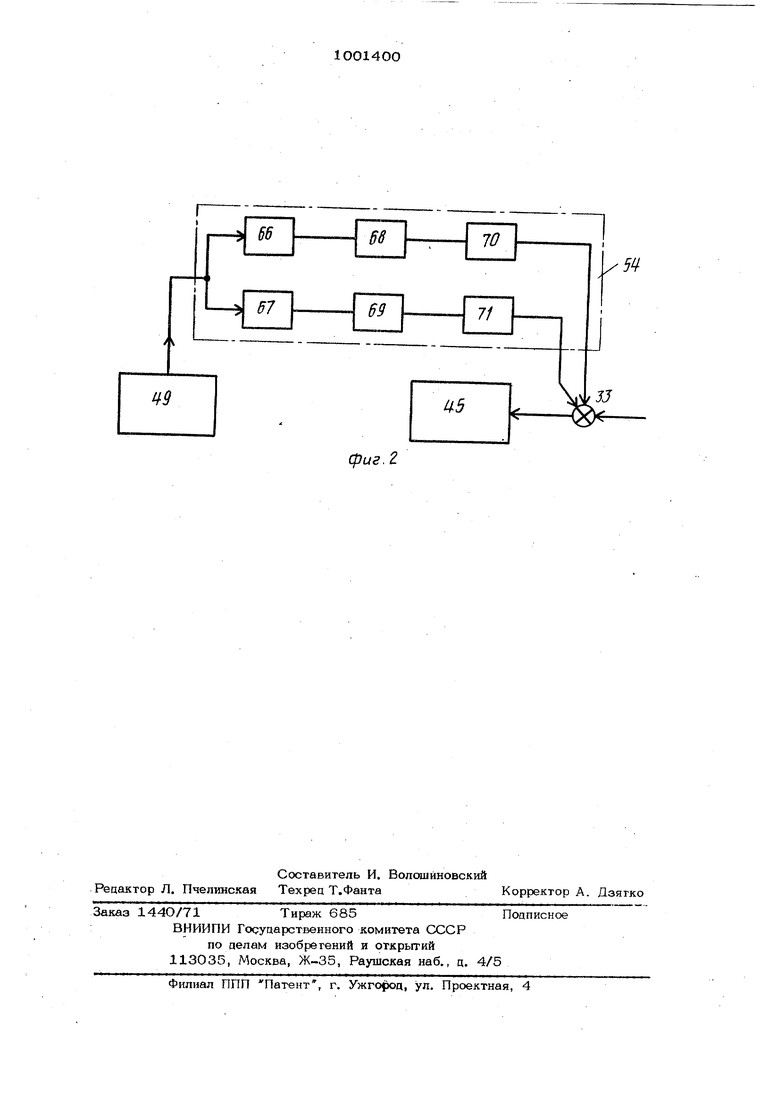
которых подключены к корректирующим входам первого и бгорого элементов сравнения в системах регулирования скорости соответственно первого и второго при воцных асшгхронных электродвигателей Однако известное устройство харак теризуется недостаточной надежностью и сравнительно низкими энергетическими показателями. Целью настоящего изобретения является повышение напежности и энергетических показателей. Указанная цель достигается , что в устройство для испытания многосвязной механической передачи с разветвленной кинематической цепью и гибкими звеньями, выполненными в. виде приводных и нагрузочных валов, содержащее цва прИ водньк асинхронных электродвигателя, цва нагрузочных синхронных генератора с- регулируемыми системами воз6у){дения четыре датчика момента, установленные на каждом приводном и нагрузочном валах, шесть элементов сравнения, первый и |5горой из которых установлены на входах систем возбужцения синхронных генераторов, третий и четвертый - на входах систем регулирования скорости соответственно первого и второго привод ных асинхронных электродвигателей, пятый и шестой на входах систем регули рования момента соответственно первого и второго приводных асинхронных электрс двигателей, программный блок, первым и вторым выходом связанный с управляю щими входами каждой из систем возбужд ния синхронных генераторов, корректирую щие входы которых соединены через корректирующие блоки с выходами соотвегст венно первого и второго датчиков момен та, третий и четвертый выходы программного блока соединены с управляющими входами третьего и четвертого элементов сравнения, информационные входы соединены с выходами соответственно первого и второго датчиков скорости, выходы третьего и четвертого датчиков момента соединены с входами соответст венно третьего и четвертого корректирук щих блоков, выходы которых подключены к корректирующим входам первого и вто рого элементов сравнения, введены четыре двигателя постоянного тока с независимым возбуждением / возбудителями и регуляторами скорости и момента, две вспомогательные электрические машины переменного тока, выпрямители, и цва преобразователя напряжения, программный блок снабжен пятым, шестым, седьмым и восьмым выходами, асинхронные электродвигатели выполнены с фазными ротора. ми, выводы обмоток каждого из которых пошслючены соответственно к входам первохх) и второго выпрямителей, к вы- ходжам которых подключены сооГветственно первый и второй двигатели постоянно. го тока, на валу каждого из которых установлень вспомогательные машины пе. ременного тока, статорные обмотки которых соединены с сетью, обмотки возбуждения первого и второго двигателей постоянного тока подключены к своим возбудителям, управляющие входы каждого из которых соединены с выходами регуляторов момента, информациондые входы пятого и шестого элементов сравнения соединены соответственно с выходами третьего и четвертого датчиков момента, а управляющие входы соединены с пятым и шестым выходами программного блока, седьмой и восьмой выходы которого соединены с управляющими входами возбудителей обмоток возбуждения соответственно третьего и четвертого двигателей постоянного тока, соединенных с валами соответственно первого и второго асинхронных электродвигателей, а также первого и второго датчиков скорости, обмотки якорей третьего и четвертого двигателей постоянного тока соединены с выходами преобразователей напряжения, управляющие входы которых подключены соответственно к регуляторам скорости первого и второго асинхронных электродвигателей, на входе которых установлены соответственно третий и четвертый элементы сравнения. Каждый корректирующий блок содержит цва блока дифференцирования первого и второго порядков, входы каждого из которых объединены и образуют вход корректирующего блока, а выходы соединены через блоки регулируемого запаздывания с входами первого и второго блоков регулирования амплитуды, выходы которых образуют парный выход корректирующего блока. На фиг. 1 представлена структурная схема устройства, на фиг. 2 - структурная схема корректирующего блока. Первый приводной вал 1 соединен с валом первого асинхронного электродвигателя 2 с фазным ротором, второй приводной вал 3 соединен с валом второго асинхронного электродвигателя 4 с фазным ротором, первый нагрузочный вал 5 соединен с валом первого нагрузочного синхронного генератора 6, второй нагрузочный вал 7 соецинен с валом второго нагрузочного синхронного генератора 8, валы 1, 3, 5 и 7 принадлежат испытуемому рецуктору 9 трансмиссии с гибкими звеньями и соецинены соответ-ственно с машинами 2, 4, 6 и 8 через вспомогательные понижающие редукторы 10 - 13. Вапы двигателей 2 и 4 соецинены с валами третьего и четвертого, двигателей 14 и 15 постоянного тока. Обмотки ротора двигателя 2 присоединены через выпрямитель 16, к выходу которого подключен якорь первого двигателя 17 ПОСТОЯННОГО тока, на-валу которого установлена первая вспомогательная электрическая мащина 18 переменного тока. Обмотки ротора двигателя 4 аналогично соединены через выпрямитель 19 с якорем второго двигателя 20 постоянного тока, на валу которого установлена вторая вспомогательная электрическая машина 21 переменного тока. На входе регулируемых систем 22 и 23 возбуждения синхронных генераторов 6 и 8, систем 24 и 25 регулирования скорости, а также систем 26 и 27 регулирования момен та установлены элементы 28 - 33 сравнения. Якорь 14 Двигателя подключен к выкопу пенообразователя 34 напряжениЯ управляющий вход которого подключен к выходу регулятора 35 скорости двига теля 2, а вход регулятора 35 соединен с элементом 20 сравнения, имеющим управляющий и информационный входы. Якорь электродвигателя 15 постоянного тока подключен к выходу преобразователя 36напряжения, управляющий вхоц которо го подключен к выходу регулятора 37 скорости двигателя 4, а вход регулятора 37соединен с элементом 31 сравнения, имеющим управляющий и информационный входы. Обмотка возбуждения синхронного генератора 6 подключена к выходу возбудителя 38, управляющий вход которого подключен к выходу блока 39 регулирования, выход которого соединен с элементом 28 сравнения, имеющим информационный вход, соединенный с выходом датчика тока возбуждения синхронного генератора 6, а также управляющий и корректирующий входы. Обмотка возбуждения синхрон ного генератора 8 соединена с выходом возбудителя 4О, управляющий вход которого подключен к выходу блока 41 регулирования, вход которого соединен с элементом 29 сравнения, имеющим информационный вход, соединенный с выходом, датчика тока возбуждения асинхронного
генератора 8, а также управляющий и корректирующий входы. Обмотка возбуждения двигателя 17 подключена к выходу воз.будителя 42, управляющий вход кото рого соединен с выходом регулятора 43 момента двигателя 2, на входе которого установлен элемент 32 сравнения с управпяюшим, корректирующим и информационным входами. Обмотка возбуждения двигателя 20 подключена к выходу возбудителя 44, управляющий вход которого , подключен к выходу регулятора 45 момента двигателя 4, на входе которого установлен элемент 33 сравнения с управ- ляющим, корректирующим и информационным входами. На валах двигателей 14 и 15 установлены датчики 46 и 47 скорости, например тахогенераторы, выходы которых соединены с информационными входами элементов 30 и 31 сравнения. Датчики 48 - 51 моментов установлены соответственно на валах 1, 3, 5 и 7. Корректирующие блоки 52 - 55 подключены входами соответственно к выходам датчиков 48, 50, 49 и 51, а выходами соответственно к корректирующим входам элементов 32, 28, 33 и 29 сравнения, у подавляющие-входы которых соединены соответственно с пятым, вторым, шестым и первым выходами программного блока 56, т-ретий,четвертый, седьмой и восьмой выходы которого соединены соот.- ветственно с .управляющими входами эле- ментов 30 и 31 сравнения к возбудителей 57 и 58. Подключение мащин переменного тока к трехфазной питающей сети выполнено через выключатели 59 -63. Якори двигателей 17 и 20 подключены к выпрямителям 16 и 19 соответственно через выключатели 64 и 65. Информационные- входы элементов 32 и 33 сравнения соединены соответственно с выходами датчиков 48 и 49. Каждый корректирующий блок выполнен в виде блока 66 дифференцирования первого порядка, блока 67 дифференциро вания второго порядка, блоков 68 и 69 регулируемого запаздывания, первого 7О и второго 71 блоков регулирования амплитуды, причем входы блоков 66 и 67 объединены и-образуют вход корректи- рующего блока, а выходы их через блоки 68 и 69 соединены соответственно с входами блоков 70 и 71, выходы которых образуют парный выход корректирующего блока. Устройство функционирует следующим образом. 710 Напряжение сети подают выключателя- ми 59 - 63, Затем по задайной програм ме испытаний в системы 22 и 23 регулирования возбуждения генераторов 6 и в поступают от программного (§лока 56 сигналы, вследствие чего на возбудителях 38 и 40 возрастает напряжение, обмотках возбуждения генераторов 6 и 8 возрастает ток возбуждения до заданных, значений. Далее сигналы от блока 56 поступают на возбудители 57 и 58, вследствие чего устанавливаются заданнь ё значения токов возбуждения двигателей 14 и 15 постоянного тока. Затем сиг. налы поступают на системы 24 и 25 регулирования скорости, под воздействием которых на преобразователях 34 и 36 начинает возрастать напряжение до задан, кого значения, вследствие чего возрастает скорость вращения двигателей 14 и до заданной величины, атакже напряжение генераторов 6 и 8. При этбм вспомогательные машины 18 и 21 разгоняются до заданной скорости. Далее сигналы от программного блока 56 поступают на системы 26 к 27 ре- гулирования момента двигателей 2 и 4, вследствие чего устанавливается заданное значение тока возбуждение и напряжение на якорях машин 17 и 20 постоянного тока, после чего замыкаются выключател 64 и 65. Однако тока в роторной цепи машин 2 и 4 в первый период.времени нет, так как напряжение выпрямителей 16 и 19 ниже напряжения якоря вспоморательных машин 17 и 20 постоянного тока. Затем подают сигналы от блока 56 в системы 26 и 27 йа снижение заданного напряжения на якорях машин 17 и 20, вследствие чего появляется ток в роторной цепи двигателей 2 и 4 и устан)авливается заданный момент их нагрузки. Далее в зависимости от сигналов от блока 56 устанавливают требуемы по программе значения моментов двигателей 2 и 4 и напряжений генераторов 6 и 8. В переходных процессах при набросе и снятии нагрузок вступают в действие корректирующие блоки 52 - 55 и демпфируют механические колебания всей электромехнической системы. Внедрение изобретения позволяет резко повысить надежность испытаний, что уменьшает количество выходящих из стро испытуемых трансмиссий, а также снизить капитальные затраты при создании стенцов, так как они требуют значи008 меньшей мощности питающих сетей и повысить их энергетические показатели, Формула изобретения 1. Устройство цля испытания многосвязной механической передачи с разветвленной кинематической цепью и гибкими звеньями, выполненными в вице приводных и нагрузочных валов, содержащие два приводных асинхронных электродвигателя, два нагрузочных синхронных генератора с регулируемыми системами возбуждения, четыре датчика момента, установленные на каждом приводном и нагрузочном валах, щесть элементов сравнения, первый и второй из которых установлены на входах систем возбуждения синхронных генераторов, третий и четвертый - на входах систем регулирования скорости соответственно первого и второго приводных асинхронных электродвигателей, пятый и шестой - на входах систем регулирования момента соответственно первого и второго приводных асинхронных электродвигателей, программный блок, первым и вторым выходом связанный с управляющими входами кожпой из систем возбуждения синхронных генераторов, корректирующие входы которых соединены соответственно через первый и второй корректирующие блоки с выходами соответственно первого и второго датчиков момента, третий и четвертый выходы программного блока соединены с управляющими входами третьего и четвертого элементов сравнения, информационные входы которых соединены с выходами соответствующих датчиков скорости, выходы третьего и четвертого датчиков момента соединены с входами соответственно третьего и четвертого корректирующих блоков, вьгх.од которых подключены к корректирующим входам первого и второго элементов сравнения, отличающееся тем, что, с целью повышения надежности, в него введены четыре электродвигателя пос гОянного тока с независим мым возбуждением возбудителями и регуляторами скорости и момента, две вспомогательные электрические машины переменного тока, выпрямители и два преобрязователя нап|эяжения, а программный блок сна&кен пятым, шестым, седьмым и восьмым выходами, приводные асинхронные электродвигатели выполнены с фазными роторами, выводы обмоток каждого из которых подключены соответственно к входам первого и второго выпрямите- ; лей, к выходам которых подключены соответственно первый и второй двигатели постоянного тока, на валу каждого из которых установлены вспомогательные электрические машины переменного тока, статорные обмотки которых снабжены выводами цля подключения к сети, упра&ляющие входы первого и второго возбудителей соединены с выходами регуляторов момента, информационные входы пятого и шестого элементов сравнения соединены соответственно с выходами треть его и четвертого датчиков момента, а их управляющие входы соединены с пятым и шестым выходами программного блока, седьмой и восьмой выходы которого соединены с управляющими входами третьего и четвертого возбудителей, третий и четвертый элекгродвигагепи постоянного тока соединены с валами соответствен но первого и второго приводных асинхронных электродвигателей, а также соответствующих датчиков скорости, обмотки якорей третьего и четвертого электродви- 100 ОО10 гателей постоянного тока соединены с выходами преобразователей напряжения, управляющие входы которых подключены соответственно к выходам третьего и четвертого элементов сравнения через регулятор скорости. 2. Устройство поп. 1, отличо- ю щ е е с я тем, что каждый из корректирующих блоков выполнен в виде блоков дифференцирования первого и второго порядка, входы каждого из которых объединены и образуют вход корректирующего блока, а выходы соединены через блоки регулируемого запаздывания со входами первого и второго блоков регулирования амплитуды, выходы которых образуют парный выход корректирующего блока. Источники информации, принятые во внимание при экспертизе 1.Миль М. Л. Вертолеты, т. 1. М., Машиностроение, 1967, с. 95. 2.Авторское свидетельство СССР № 78775О, кл. Н О2 Р 5/ОО, 1978.

| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ СТЕНД ДЛЯ ИСПЫТАНИЯ СИЛОВЫХ ПЕРЕДАЧ | 2013 |
|
RU2554339C2 |
| Автоматический стенд для испытаний трансмиссий | 1987 |
|
SU1460640A1 |
| Устройство оптимизации электропривода стенда для испытаний трансмиссий | 1988 |
|
SU1596305A1 |
| УСТРОЙСТВО АВАРИЙНОГО ОХЛАЖДЕНИЯ РЕАКТОРНОЙ УСТАНОВКИ ПРИ ЕЕ ОБЕСТОЧИВАНИИ | 2013 |
|
RU2539862C1 |
| Способ пуска группы электродвигателей от синхронного генератора | 1985 |
|
SU1339848A1 |
| СИСТЕМА БЕСПЕРЕБОЙНОГО И ГАРАНТИРОВАННОГО ЭЛЕКТРОСНАБЖЕНИЯ ДЛЯ НАИБОЛЕЕ ОТВЕТСТВЕННЫХ ПОТРЕБИТЕЛЕЙ ЭЛЕКТРОЭНЕРГИИ | 2012 |
|
RU2518907C1 |
| Система управления гребной электрической установкой переменного тока с единой электростанцией | 1990 |
|
SU1763288A1 |
| Электропривод роторного экскаватора | 1986 |
|
SU1425285A1 |
| Стенд для испытания передач | 1983 |
|
SU1096516A1 |
| УСТРОЙСТВО ДЛЯ ЗАПУСКА МОЩНЫХ СИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ | 2020 |
|
RU2737958C1 |
/
сриг.2 5
