Фиг,1 31S9 шение КПЛ) с одновременным обеспечением работоспособности устройства оптимизации „ Это достигается тем, что в известное устройство, содержащее стенд переменного тока, состоящий из взаимно нагруженных асинхронного двигателя 2 с регулятором момента 10, тормозного синхронного генератора 3 с регулятором тока возбуждения 11, а также приводного двигателя постоянного тока 5 с регулятором скорости 9, и включающее поисковое устройство оптимизации с синхронным детектированием, добавлены однополярный сумматор 1б, сумматор 17, блок ограничений 18 и блок 19 регулирования амплитуды поисковых колебаний. 5 Интегратор 1 выполнен однополярным а синхронный детектор выполнен на ключах 20, 21, однополярных выпрямителях 22 и 23 и элементе сравнения 2k с соответствующими связями. При этом вновь введенные блоки и связи обеспечивают минимизацию потребляемой мощности электропривода стенда с учетом ограничения минимального и максимального значений тока возбуждения генератора, чем достигается цель изобретения, а блок регулирования амплитуды поисковых колебаний стабилизирует скорость поиска при переходе системы регулирования момента на статические характеристики разной крутизны.. 2 ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический стенд для испытаний трансмиссий | 1987 |
|
SU1460640A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ СТЕНД ДЛЯ ИСПЫТАНИЯ СИЛОВЫХ ПЕРЕДАЧ | 2013 |
|
RU2554339C2 |
| СПОСОБ ПРОГРАММНОГО УПРАВЛЕНИЯ ШАГОВЫМ ПЕРЕМЕЩЕНИЕМ ПОСРЕДСТВОМ ШАГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
SU1795861A1 |
| Устройство для испытания электропривода с упругой механической передачей от двигателя к механизму | 1981 |
|
SU1000950A1 |
| Устройство для испытания многосвязанной механической передачи с разветвленной кинематической цепью с гибкими звеньями | 1978 |
|
SU787750A1 |
| Устройство для испытания механической трансмиссии | 1988 |
|
SU1585704A1 |
| Устройство для испытания механической трансмиссии | 1978 |
|
SU790091A1 |
| УСТРОЙСТВО КОМБИНИРОВАННОГО ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ЭКСКАВАТОРА | 1990 |
|
RU2030521C1 |
| Электропривод постоянного тока с минимизацией потерь в двигателе | 1984 |
|
SU1432705A2 |
| Электропривод постоянного тока по системе генератор-двигатель с упругим звеном и способ для его управления | 1987 |
|
SU1723649A1 |
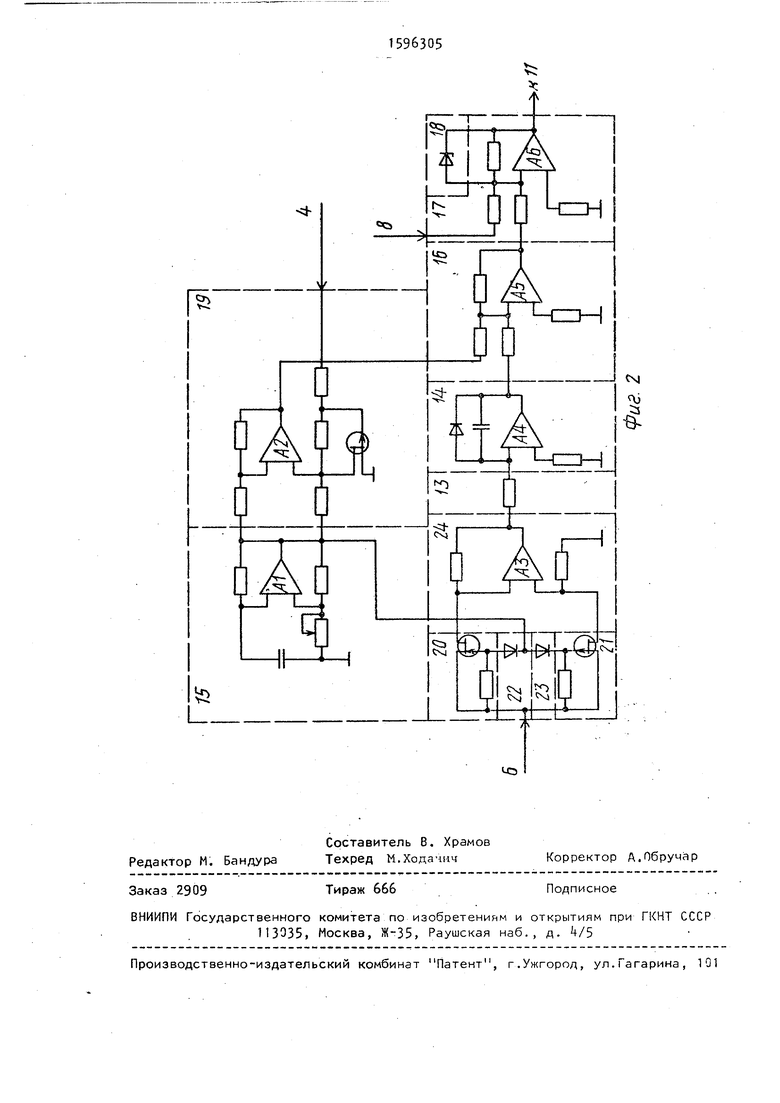
Изобретение относится к электротехнике и может быть использовано для оптимизации энергетических затрат многоагрегатных стендов переменного тока большой мощности для испытаний механических трансмиссий. Цель изобретения - минимизация потребляемой мощности электропривода стенда ( повышение КПД ) с одновременным обеспечением работоспособности устройства оптимизации. Это достигается тем, что в известное устройство, содержащее стенд переменного тока, состоящий из взаимно нагруженных асинхронного двигателя 2 с регулятором момента 10, тормозного синхронного генератора 3 с регулятором тока возбуждения 11, а также приводного двигателя постоянного тока 5 с регулятором скорости 9, и включающее поисковое устройство оптимизации с синхронным детектированием, добавлены однополярный сумматор 16, сумматор 17, блок ограничений 18 и блок 19 регулирования амплитуды поисковых колебаний. Интегратор 14 выполнен однополярным, а синхронный детектор выполнен на ключах 20,21, однополярных выпрямителях 22 и 23 и элементе сравнения 24 с соответствующими связями. При этом вновь введенные блоки и связи обеспечивают минимизацию потребляемой мощности электропривода стенда с учетом ограничения минимального и максимального значений тока возбуждения генератора, чем достигается цель изобретения, а блок регулирования амплитуды поисковых колебаний стабилизирует скорость поиска при переходе системы регулирования момента на статические характеристики разной крутизны. 2 ил.
Изобретение относится к электротехнике и может быть использовано для оптимизации энергетических затра многоагрегатных стендов переменного тока большой мощности для испытаний механических трансмиссий„ Целью изобретения является минимизация потребляемой мощности стенда (повышение КПД) для испытаний транс-, миссий с нагрузочным устройством, вы полненным на основе встречно включен.ных мощных электрических машин переменного, тока в условиях ограниченного изменения тока возбуждения нагрузочного синхронного генератора. На фиг. 1 изображена функциональная схема предлагаемого устройства; на фиг, 2 - принципиальная схема реализации устройства (для простоты на ней не изображены агрегаты и блоки, относящиеся к самому испытательному стенду и имеющие типовую реализацию) В соответствии с функциональной схемой {фиг. 1) устройство оптимизац электропривода стенда для испытаний трансмиссий содержит трансмиссию 1, нагрузочный асинхронный двигатель 2 с фазным ротором, тормозной синхронный генератор 3, датчик j момента, лриводной двигатель 5 постоянного тока, датчик 6 тока, датчик 7 скорости, задающий блок Ь, регулятор 9 скорости, регулятор 10 момента, регу лятор) 11 тока возбуждения синхронног генератора, синхронный детектор 12, усилитель 13, интегратор 14, генератор 15 поисковых колебаний, однополярн1;й сумматор 16, сумматор 17, блок 18 ограничений, блок 19 регулирования амплитуды поисковых колебаний, первый 20 и второй 21 ключи, первый 22 и второй 23 выпрямители, элемент 2k сравнения, нагрузочный вал 25, редуктор 26 и приводной вал 27 Устройство оптимизации электропривода стенда для испытаний трансмиссий работает следующим образом. Регуляторы скорости 9 электропривода и возбуждения 11 синхронного генератора подключаются к сети (не показана). От задающего блока подаются входные сигналы (уставки) сначала на вход регулятора 11 - соответствующий максимальному току возбуждения gMoiKo затем на вход регулятора 9 - соответствующий заданной величине корости приводного двигателя 5 После установления тока возбуждения и разгона двигателя до установившейся скорости на статоре синхронного генератора устанавливается напряжение, соответствующее установившимся току возбуждения и скорости (цепи статоров замкнуты). Затем с задающего блока 8 подается установка на регулятор 10 момента, выполненный по схеме асинхронно-вентильного электромашинного каскада, и устанавливаются соответствующий нагрузочный момент и максимальный в этом режиме ток приводного двигателя, отвечающий наибольшим потерям стенда. Одновременно включается генератор 15 поисковых колебаний, который вырабатывает поисковые периодические сигналы прямоугольной формы и расчетной амплитуды, малой по сравнению с уровнем уставки блока 8 на ig периодом, превышающим время установления всех переходных процессов в стенде. Поисковые сигналы через блок 19 регулирования амплитуды, который корректирует амплитуду сигнала в соот ветствии с величиной установившегося нагрузочного момента, и далее через однополярный сумматор 1б поступает на сумматор 17, накладываясь на посто янный сигнал уставки регулятора 11 и вызывая колебания тока возбуждения около установившегося значения i Последние приводят к колебаниям нагрузочного момента и тока якоря приводного двигателя 5 (и колебаниям мощ ности потерь, пропорциональной току якоря при постоянной скорости двигателя 5). Сигналы поисковых колебаний с генератора 15 поступают на входы од нополупериодных выпрямителей 22, 23 различных полярностей, которые управляют ключами 20,21, открывая их в про тивофазе. На вторые входы ключей пода ется сигнал с датчика тока якоря с пе ременной составляющей, определяемой поисковым сигналом, а на выходах ключей 20, 21 формируются сигналы, пропорциональные приращениям тока якоря (мощности потерь) от положительного (на выходе одного ключа) и от отрицательного (на выходе другого ключа) полупериодов поискового сигнала. На элементе 24 сравнения, оценивающем разность этих сигналов, появляется периодический сигнал, среднее (выпрямленное) значение которого либо равно нулю, либо не равно нулю и отрицательно или положительно. При этом равенство нулю означает равенство амп литуд положительной и отрицательной полуволн поисковых колебаний тока яко ря (мощности потерь). Это указывает на то, что средняя точка колебаний со ответствует минимуму статической зависимости тока якоря приводного двигателя от тока возбуждения синхронного генератора. Ненулевое среднее значение периодического выходного сигнал блока 2k того или иного знака соответствует нахождению средней точки по исковых колебаний, на лебой или правой ветвях статической зависимости. He.iyлевое среднее значение сигнала элемента 2 сравнения через масштабирующий усилитель 13 подается на вход интегратора 1 и, накапливаясь на его выходе, через блоки 1б, 17 и 18 посту пает на вход регулятора 11 тока возбуждения. При этом, как было указано, устройство выполнено так, что начинает работу с максимального тока возбужде-. ния, и средняя точка колебаний находится на правой ветви статической характеристики, а сигнал с выхода интегратора, поступающий через сумматор 1б на ьход сумматора 17, выбран противоположным по знаку сигналу уставки, приходящему с задающего блока 8 на сумматор 17. Поэтому в результате начала поисковых колебаний накапливаемый на интеграторе сигнал приводит к уменьшению тока возбуждения и смещению средней точки поисковых колебаний по правой ветви статической характеристики потерь в нисходящем направлении к минимуму. При постоянной амплитуде поисковых колебаний скорость накопления величины выходного сигнала интегратора определяется крутизной статической характеристики и значением коэффициента передачи масштабирующего усилителя, выбираемого из условий устойчивости и достаточного быстродействия устройства оптимизации, особенно при приближении к минимуму, когда движение замедляется, так как средняя точка поисковых колебаний переходит на участки меньшей крутизны. При достижении минимума среднее значение выходного сигнала лемента 2 сравнения становится равным нулю, а величина выходного сигтла интог-ратора Ц устанавливается п.-тсяниой, и изменение тока возбуждснич, а зиячит, и движение средней точки поисковых колебаний прекращается, и процесс минимизации заканчивается. Если минимум статической зависимости тока якоря соответствует значению тока возбуждения, меньшего минимапьно допустимой величины то движение точки к минимуму, а значит, увеличение выходного сигнала интегратора заканчивается при достижении максимального значения, определяемого уровнем ограничения интегратора. Причем значение ограничения выбрано таким, что создаваемая на выходе сумматора 17 разность между уставкой заДающего блока, определяющей максимальный ток возбуждения i. с сигналом ограничения интегратора соответствует минимальному значению тока возбуждения ijManc. 15 Таким образом, ограничение интегратора (снизу) обеспечивает остановку движения поиска на нисходящей ветви, не достигая минимума, если ток возбуждения понижается до предельно допустимого минимального значения. Выполнение интегратора 1 и сумматора 16 однополярными гарантирует постоянство знака тока возбуждения и сохра-щ нение постоянным направления нагрузоч ного момента стенда. Блок 19 регулиро вания амплитуды поисковых колебаний вступает в работу при изменении уровн нагрузочного момента стенда, являющегося его входным сигналом. Так как стенд переходит в другой режим работы соответствующий статической характери стике с большей или меньшей крутизной и более или менее острым минимумом, то при этом блок 19 соответственно уменьшает или увеличивает амплитуду генератора поисковых колебаний, умень шая или увеличивая скорость поисковог движения. Блок 18 ограничения ограничивает максимально допустимый ток воз буждения значением насыщения. Из приведенного описания работы устройства оптимизации видно, что вновь введенные блоки и связи в совокупности с имеющимися обеспечивают минимизацию устройством потерь стенда (минимизацию потребляемой мощности электропривода) в условиях ограниченного изменения тока возбуждения, уем достигается цель изобретения„ Формула изобретерия Устройство оптимизации электропри
вода стенда для испытании трансмиссии, содержащее тормозной синхронный генератор, вход которого соединен с выходом регулятора возбуждения синхронного генератора, а выход соединен со 45 входом датчика момента, механический выход которого через нагрузочный вал связан с входом редуктора, а электрический выход подключен к первому.входу регулятора момента, выход редуктора 50
выход - с первым входом однополярного сумматора, второй вход которого соединен с выходом интегратора, выход однополярного сумматора подключен к первому входу сумматора, второй вход которого соединен с третьим выходом задающего блока, выход сумматора соединен через блок ограничений с входо регулятора тока возбуждения синхронного генератора. 5 через приводной вал подключен к механическому выходу нагрузочного асинхронного двигателя с фазным ротором, к первому электрическому входу которого подключен выход регулятора момента, а к второму входу подключен электрический выход тормозного синхронного генератора, вход нагрузочного асинхронного двигателя с фазным ротором подсоединен к первому механическому выходу приводного двигателя постоянного тока, второй механический выход которого соединен с входом датчика скорости, электрический вход приводного двигателя постоянного тока подключен к первому выходу датчика тока , второй выход которого соединен с вторым входом регулятора скорости и первым входом синхронного детектора, выход датчика скорости подключен к входу регулятора скорости, третий вход регулятора скорости соединен с первым выходом задаюсцего блока, второй рыход которого соединен с входом регулятора момента, выход генератора поисковых колебаний соединен с вторым входом синхронного детектора, выход которого через усилитель подключен к входу интегратора, отличающееся тем, что, с целью повышения КПД стенда, в него дополнительно введены блок регулирования амплитуды поисковых колебаний, однополярный сумматор, сумматор и блок ограничений, причем вход блока регулирования амплитуды поисковых колебаний соединен с выходом генератора поисковых колебаний, второй его вход соединен с электрическим выходом датчика момента, а его
