(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ
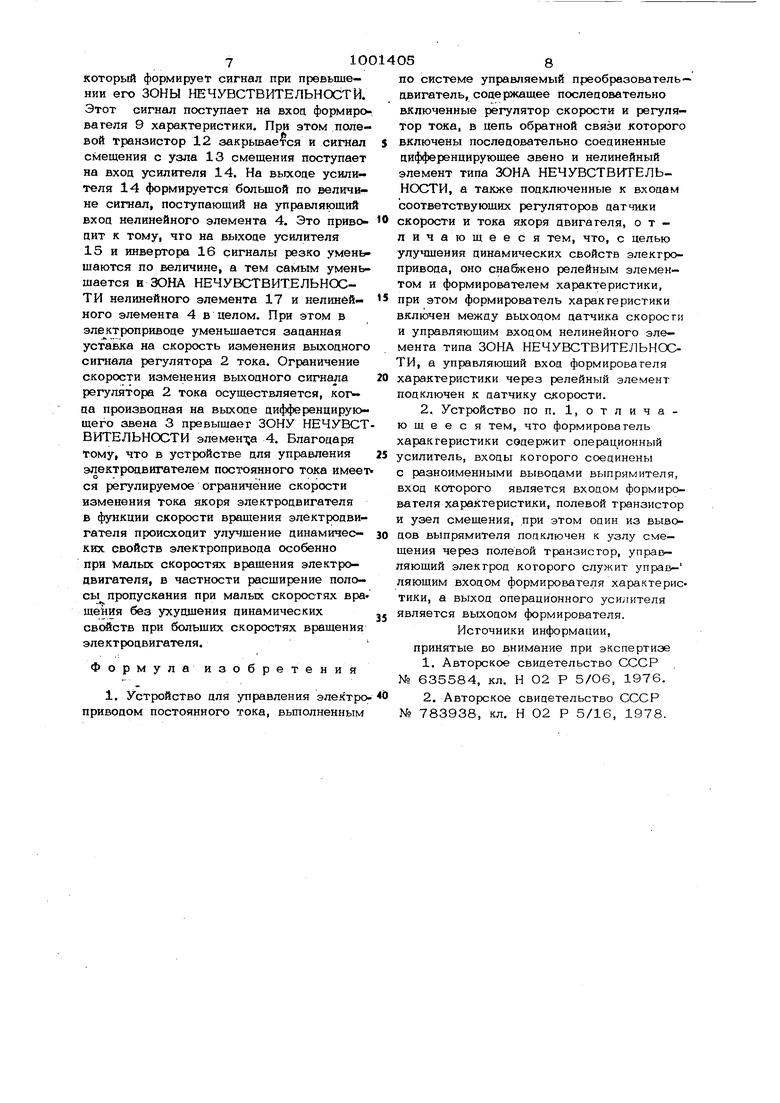
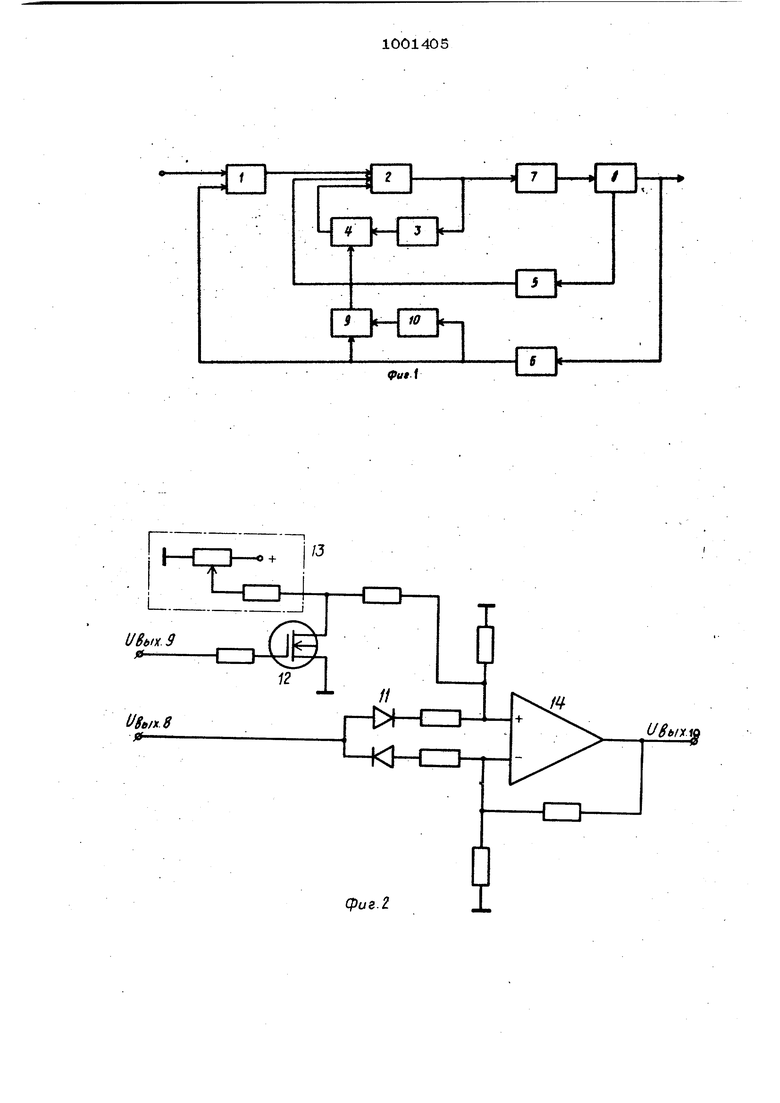
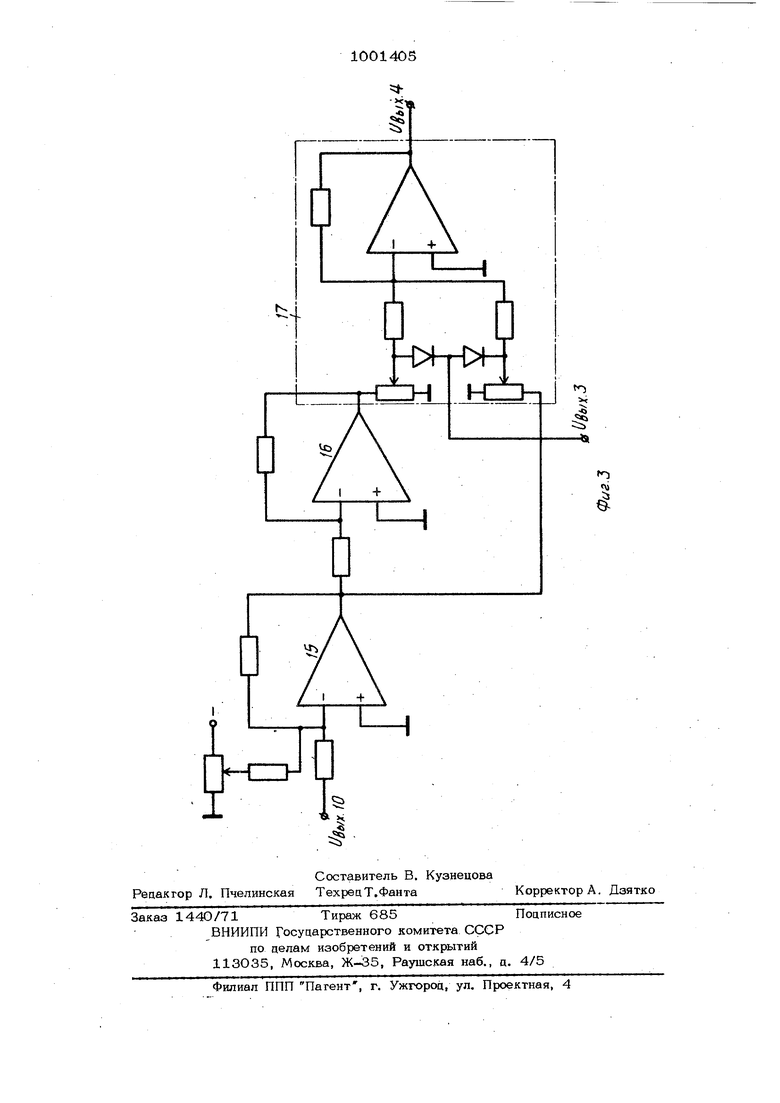
. ПОСТОЯННОГО ТОКА Изобретение относится к электротехнике и может быть использовано в системах подач металлорежущих станков. Известно устройство для ограничения тока в системе подчиненного регулирования электроприводом постоянного тока, содержащее последовательно включенные регулятор скорости, регулятор тока, преобразователь, электродвигатель с датчика ми скорости и тока, блок возведения в квадрат и блок дифференцирования 1 . Данное устройство обеспечивает ограничение скорости нарастания тока якоря электродвигателя, однако ограничение скорости изменения тока в электропривоце неизменно по величине на различных скоростях вращения электродвигателя, а высОкомоментные и малоинерционные электродвигатели постоянного тока допускают большие скорости изменения тока якоря лишь в зоне малых скоростей вращения. При больших же скоростях вращения допустимая скорость изменения тока якоря электродвигателя невелика. Ограничение скорости изменения тока якоря, неизменное по величине во всем диапазоне регулирования скорости вращения электродвигателя и настроенное на 1 ппгимапьную скорость изменения тюка якоря, при больших скоростях вращения электродвигателя приводит к тому, что динамические характеристики электропривода существенно ухудшены, особенно на малых скоростях вращения электродвигателя. Динамические характеристики данного электропривода занижены и вследствие того, что ограничение скорости изменения тока осуществляется в функции самого тока якоря электродвигателя. В этом случае в электроприводе возникает запаздывание для регулирования скорости изменения тока якоря электродвигателя в связи с тем, что регулятор тока и преобразователь имеют определенную инерционность. Наиболее близким к предлагаемому является устройство для управления электроприводом постоянного тока, выполненнкм по системе управляемый преобразователь - двигатель, содержащее после- довательно включенные регулятор скороо ти и регулятор тока, в цепь обратной , связи которого включены послецовательно соеаиненные дифференцирующее звено и нелинейный элемент типа ЗОНА НЕЧУВСТВИТЕЛЬНОСТИ, а также подключенные к входам соответствующих регуляторов датчики скорости и тока якоря двигателя 2 , . В электроприводе обеспечивается улуч шение динамических свойств путем ограничения скорости изменения тока якоря . элекгродвигаталя, осущесгвляемого ттутем ограничения скорости изменения выходного сигнала пропорционально-интегрального регулятора тока. При этом в электроприводе нет запаздывания для регулирования ограничения скорости из-, менения тока, так как регулирование скорости изменения тока осуществляется в функции выходного сигнала регулятора тока, а не самого тока. При этом регули рование скорости изменения тока происхо цит с упреждением по отиощению к элек- тромапштным процессам в электродвига Теле. Однако динамические свойства электропривода ухуцщены вследствие то- го, чго ограничение скорости изменения тока якоря электродвигателя неизменно на разных скоростях вращения, хотя высокомоментные и малоинерционные элёкт родвигатели допускают при малых скоростях вращения больщие скорости изменени тока якоря электродвигателя. Цель изобретения - .улучщение динамических свойств электропривода путем оптимизации процесса регулирования скорое ти изменения тока якоря электродвигателя в широком диапазоне 1зегулирования скорости вращения электродвигателя. Поставленная цель достигается тем, что устройство для управления электроприводом постоянного тока, выполненным по системе управляемый преобразователь электродвигатель, содержащее последовательно включенные регулятор скорости и регупялор тока, в цепь обратной связи которого включены последовательно соедт ненные дифференцирующее звено и нелинейный элемент типа ЗОНА НЕЧУВСТВИТЕЛЬНОСТИ, а также подключенные к входам соответствующих регуляторов датчики скорости и тока якоря двигателя, снабжено релейным элементом и формирователем характеристики, при этом .формирователь характеристики включен между выходом датчика скорости и упров ляющим входом нелинейного элемента типа ЗОНА НЕЧУВСТВИТЕЛЬНОСТИ, а управляющий вход формирователя характеристики через релейный элемент поаклк чей к датчику скорости. Кроме того, формирователь характеристики содержит операционный усилитель, входы которого соединены с разноименными выводами выпрямителя, -вход которого является входом формирователя характеристики, полевой транзистор и узел смещения, при этом один из выводов выпрямителя подключен к узлу смещения через полевой транзистор, управляющий электрод которого управляющим входом формирователя характеристики, а выход операционного усилителя является выходом формирователя. На фиг. 1 изображена функциональная схема устройства для управления электроприводом постоянного тока, на фиг. 2 функциональная схема формирователя характеристшси, на фиг, 3 -одна из возможных функциональных схем нелинейного элемента типа ЗОНА НЕЧУВСТВИТЕЛЬНОСТИ. Устройство для управления электроприводом постоянного тока (фиг. 1) содержит регулятор 1 скорости и регулятор 2 тока, в цепь обратной связи которого включены дифференцирующее звено 3 и нелинейный элемент 4 типа ЗОНА НЕЧУВСТВИТЕЛЬНОСТИ, а также йодключенные к соответствующим регуляторам датчик 5 тока и датчик 6 скорости, Электропривод содержит управляемый пре образователь 7 и двигатель 8. Между выходом датчика 6 скорости и управляюшим входом нелинейного элемента 4 включен формирователь. характеристики, управляющий вход которого через релейный элемент 10 подключен к датчику 6 скорости. Формирователь характеристики (фиг.2) состоит из выпрямителя 11, полевого транзистора 12, узла 13 смещения и операционного усилителя 14, причем один из входов выпрямителя 11 подключен через полевой транзистор 12 к узлу 13 смещения. Элемент с нелинейностью типа ЗОНА НЕЧУВСТВИТЕЛЬНОСТИ (фиг. 3) содержит усилитель 15, инвертор 16 и нелинейный элемент 17, причем выход усилителя 15 подключен к инвертору 16 и первому входу нелинейного элемента 17, ко второму вхоау которого подключен выход инвертора 16. Устройство рабогаег слеауюшим образом, Послецовагельное соединение регулятора 1 скорости, регулятора 2 тока, преобразователя 7 и электродвигателя 8 с датчиками тока 5 и скорости 6 образуют двухконтурную систему с подчиненным регулированием параметров. Регулятор 2 тока охвачен отрицательной обратной связью по производной выходно го сигнала, причем обратная связь образ вана дифференцирующим звеном 3 и нелине ным элементом 4типа ЗОНА НЕЧУВСТВИТЕЛЬНОСТИ Управляющий вход элемен та 4 подключен через формирователь 9 характеристики к датчику 6 скорости, В зависимости от величины скорости изменения (производной) выходного сигн ла регулятора тока 2, а также функции скорости вращения электродвигателя 8 происходит включение (или не происходи отрицательной обратной связи по производной выходного сигнала регулятора 2 тока через нелинейный элемент 4. Тем самым происходит регулирование скорост изменения выходного сигнала регулятора 2 тока и соответственно скорости из менения тока якоря электродвигателя 8. Величина ЗОНЫ НЕЧУВСТВИТЕЛЬНОСТ нелинейного элемента 4 изменяетсявы- ходным сигналом датч.ика 6 скорости через формирователь 9 характеристики, . управление которым осуществляет релейный элемент 1О, подключенный к датчик 6 скорости. .Скорость изменения выходного сигнала регулятора 2 тока определяется дифференцирующим звеном 3, под ключенным к выходу регулятора 2 тока. Изменение ЗОНЫ НЕЧУВСТВИТЕЛЬНОСТИ нелинейного элемента 4 в функции скорости вращения электродвигателя 8 осуществляется следующим образом, Входным сигналом формирователя 9 характеристики является скорость враше ния двигателя, причем этот сигнал пос- тупает на вход выпрямителя 11, nojjyчающий модуль скорости. Выход релейно го элемента 1О подключен к полевому транзистору 12, шунтируюшему узел 13 смещения. При этом при малых скоростя вращения релейный элемент 10 выдает сигнал нуль, транзистор 12 открыт и сигнал смещения с узла 13 смещения щунтируется, В этом режиме выходной сигнал выпрямителя 11 и сигнал усилителя 14 пропорциональны скорости вращения электродвигателя и поступают на вход нелинейного элемента 4. При. этом ЗОНА НЕЧУВСТВИТЕЛЬНОСТИ . элемента 4 выбирается больщой, для | того чтобы ограничение происходило при больщих скоростях изменения выходного сигнала регулятора 2 тока. Настройка требуемой величины ЗОНЫ НЕЧУВСТВИТЕЛЬНОСТИ элемента 4 осуществляется изменением напряжения, смещения, подаваемым на вход усилителя 15,и определяется предельными возможностями электродвигателя при нулевой скорости вращения. Выходной сигнал уси лителя 15 поступает на вход инвертора 16,предназначенного для формирования противофазного сигнала по сравнению с сигналом усилителя 15. Выходные сиг налыинвертора 16 и усилителя 15 подаются на входы нелинейного элемента 17 и являются ЗОНОЙ НЕЧУВСТВИТЕЛЬНОСТИ нелинейного элемента 17, а следовательно, и элемента 4. При малых скоростях вращения электродвигателя 8 сигнал на выходе формирователя 9 характеристики, пропорциональный скорости вращения электродвигателя, мал по величине и усилитель 15 с инвертором 16 формируют максимальный по величине сигнал, соответствующий максимальной величине ЗОНЫ НЕЧУВСТВИТЕЛЬНОСТИ нелинейного элемента 17, В электроприводе величина ограничения скорости из- менен.ия выходного сигнала регулятора 2 тока максимальна по величине, причем ограничение скорости изменения осуществляется, когда производная, получаемая на выходе дифференцирующего звена 3, больше ЗОНЬ НЕЧУВСТВИТЕЛЬНОСТИ нелинейного элемента 4. При этом в электроприводе при малых скоростях вра- щения электродвигателя повышается быст родействие в контуре регулирования тока, что приводит к улучшению динамических свойств электропривода, в частности к расщирению полосы пропускания Причем при уменьшении скорости вращения электродвигателя предельная величина ограничения скорости изменения выходного сигнала регулятора 2 тока.увеличивается, что приводит к улучшению динамических свойств электропривода в широких пределах регулирования скорости вращения электродвигателя. При больших скоростях врашения электродвигателя в электроприводе надо уменьшить скорость изменения тока якоря и соответственно уменьшить скорость изменения выходного сигнала регулятора 2 тока. При. увеличении скорости вращения электродвигателя 8 увеличивается и сигнал на входе релейного элемента 1О, 710014 который формирует сигнал при превыше- НИИ его ЗОНЫ НЕЧУВСТВИТЕЛЬНОСТИ. Этот сигнал поступает на вход формиро. вагеля 9 характеристики. При этом полевой транзистор 12 закрывается и сигнал 5 смещения с узла 13 смещения поступает на вход усилителя 14. На вьпходе усилителя 14 формируется больщой по величине сигнал, поступающий на управляющий вход нелинейного элемента 4. Это приво- О дит к тому, что на выходе усилителя 15 и инвертора 16 сигналы резко уменьшаются по величине, а тем самым уменьшается и ЗОНА НЕЧУВСТВИТЕЛЬНОСТИ нелинейного элемента 17 и нелинбй- ного элемента 4 в целом. При этом в электроприводе уменьщается заданная уставка на скорость изменения выходного сигнала регулятора 2 тока. Ограничение скорости изменения выходного сигнала 20 регулятора 2 тока осуществляется, ког- да производная на выходе дифференцирующего звена 3 превыщает ЗОНУ НЕЧУВСТВИТЕЛЬНОСТИ элементна 4. Благодаря тому, что в устройстве для управления 25 электродвигателем постоянного тока имеет ся регулируемое ограничение скорости изменения тока якоря электродвигателя в функции скорости вращения электродвигателя происходит улучщение динамичес- зо ких свойств электропривода особенно при Малых скоростях вращения электродвигателя, в частности расщирение поло- сы пропускания при малых скоростях вращемя без ухудщения динамическихjj свойств при больших скоростях вращения электродвигателя. Ф м у л а и 3 о бр е т е н и я - 1. Устройство для управления электро- 0 приводом постоянного тока, выполненным 058 по системе управляемый преобразователь - двигатель, содержащее последовательно включенные регулятор скорости и регулятор тока, в цепь обратной связи которого включены последовательно соединенные дифференцирующее звено и нелинейный элемент типа ЗОНА НЕЧУВСТВИТЕЛЬНОСТИ, а также подключенные к входам соответствующих регуляторов датчики скорости и тока якоря двигателя, о т личаюшееся тем, что, с целью улучшения динамических свойств элекгропривода, оно снабжено релейным элементом и формирователем характеристики, при этом формирователь характеристики включен между выходом датчика скорое ги и управляющим входом нелинейного элеменга типа ЗОНА НЕЧУВСТВИТЕЛЬНОСТИ, а управляющий вход формировагеля характеристики через релейный элемент подключен к датчику скорости. 2, Устройство по п. 1,отличаю щ е е с я тем, что формирователь характеристики содержит операционный усилитель, входы которого соединены с разноименными выводами выпрямителя, вход которого является входом формирователя характеристики, полевой транзистор и узел смещения, при этом один из выводов выпрямителя подключен к узлу смещения через полевой транзистор, управляющий электрод которого служит управ ляющим входом формирователя характеристики, а выход операционного усилителя является выходом формирователя. Источники информации, принятые во внимание при экспертизе - Авторское свидетельство СССР № 635584, кл. Н 02 Р 5/О6, 1976. 2. Авторское свидетельство СССР № 783938, кл. Н О2 Р 5/16, 1978.
Lrrvnn
JH
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электроприводом постоянного тока | 1980 |
|
SU900392A1 |
| Электропривод постоянного тока | 1983 |
|
SU1145438A1 |
| Электропривод с подчиненным регулированием параметров | 1983 |
|
SU1108593A2 |
| Электропривод постоянного тока | 1980 |
|
SU921014A1 |
| Устройство для управления электроприводом постоянного тока | 1981 |
|
SU1001404A2 |
| Способ управления электроприводом постоянного тока | 1982 |
|
SU1150721A1 |
| Тиристорный электропривод постоянного тока | 1986 |
|
SU1376203A1 |
| Устройство для управления электродвигателем постоянного тока | 1983 |
|
SU1141550A1 |
| Электропривод с подчиненным регулированием параметров | 1981 |
|
SU997215A2 |
| Регулируемый электропривод постоян-НОгО TOKA | 1977 |
|
SU817951A1 |
} ZlL-TT
Фи 1I-
