(54) РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления механизмом экскаватора | 1978 |
|
SU773212A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Устройство для двухзонного регулирования скорости многодвигательного электропривода | 1980 |
|
SU875570A1 |
| Электропривод бурового станка | 1989 |
|
SU1641969A1 |
| Электропривод постоянного тока | 1984 |
|
SU1228208A2 |
| Реверсивный тиристорный электропривод с упругой передачей от двигателя к механизму | 1977 |
|
SU731539A1 |
| Устройство для управления электроприводом поворота одноковшового экскаватора | 1980 |
|
SU907178A1 |
| Электропривод постоянного тока | 1983 |
|
SU1115188A1 |
| Устройство для управления электроприводом постоянного тока, выполненное по принципу двухзонного регулирования | 1979 |
|
SU938354A1 |
| Устройство для регулирования частоты вращения электропривода постоянного тока | 1977 |
|
SU731538A1 |
1
Изобретение относится к электроприводам и может быть использовано для установок, где требуется регулирование частоты вращения и момента двигателя в широких пределах в статических и динамических режимах.
Известен регулируемый электропривод, выполненный по системе источник тока - двигатель, где якорь двигателя постоянного тока независимого возбуждения подключен к нерегулируемому источнику тока, а обмотка возбуждения - к реверсивному регулятору возбуждения. Регулирование скорости и момента в указанной системе электропривода осуществляется по цепи возбуждения, для чего используется задержанная обратная связь по частоте вращения 1.
Недостатками такой системы электропривода являются- невысокое быстродействие, недоиспользование перегрузочной способности двигателя вследствие неизменной величины тока якоря, а также невозможность рекуперации в сеть энергии при торможении привода.
Известен также регулируемый электропривод, в котюром в качестве регулируемого источника тока для питания двигателя используется нереверсивный тиристорный преобразователь с контуром стабилизации тока якоря. При этом преобразователь обеспечивает рекуперацию энергии в сеть при торможении привода. Система автоматического управления содержит два внутренних контура регулирования: токов якоря и возбуждения, а также внещний контур регулирования частоты вращения с общим регулятором частоты вращения. Управление электроприводом осуществляется одновременным воздействием на токи цепей якоря и возбуждения 2.
Недостатки указанной системы электропривода проявляются в ограниченном быстродействии, невозможности регулирования стопорного момента и сложности системы управления электроприводом.
Наиболее близким к предлагаемому rto технической сущности является электропривод, выполненный по системе регулируемый источник тока - двигатель с релейным реверсом тока возбуждения Система электропривода содержит двигатель постоянного тока независимого возбуждения, нереверсивный управляемый выпрямитель для питания якоря, реверсивный управляемый преобразователь в цепи обмотки возбуждения, датчики частоты вращения и тока возбуждения. Система управления электроприводом построена по принципу подвиненного регулирования: Она содержит два внутренних контура регулирования токов якоря и возбуждения и внешний контур регулирования частоты враШ,ения. Контур регулирования тока якоря -вместе с нереверсивным управляемым выпрямителем для питания якоря образуют регулируемый источник тока. Согласование работы контуров тока якоря и возбуждения осуществляется с помощью специального блока - умножителя. На первый вход умножителя поступает сигнал от регулятора частоты вращения, а на второй вход - от датчика тока возбуждения. При изменении знака входного сигнала регулятора частоты вращения выходное напряжение умножителя и ток якоря равны нулю до тех пор, псча не изменится знак тока возбуждения. Это обеспечивает плавное нарастание момента двигателя и не допускает увеличения частоты вращения выше начального значения в первый момент торможения 3.
Недостатками рассмотренной системы электропривода являются невозможность регулирования стопорного и динамического момента в переходных режимах, а также невысокое быстродействие.
Цель изобретения - обеспечение регулирования динамического момента в переходных режимах и повышение быстродействия электропривода.
Поставленная цель достигается тем, что в регулируемый электропривод постоянного тока, состоящий из двигателя постоянного тока независимого возбуждения, регулируемого-источника тока якоря, реверсивного преобразователя в цепи возбуждения с релейным двухвходовым усилителем на входе, датчика и задатчнка тока возбуждения и регулятора частотм вращения, выход которого включен через устройство, согласующее работу контуров тока якоря и возбуждения, на вход регулируемого источника тока якоря, а ко вхцдам регулятора частоты вращёни-я подключены источник задающего напряжения и цепь обратной связи по частоте .вращения, введены ключевой элемент и два блока нелинейности с зоной нечувствительности. При этом в цепь обратной связи по частоте вращения включены последовательно соединенные первый блок нелинейности и ключевой элемент, управляющий вход которого через второй блок нелинейности подключен к датчику тока возбуждения. Кроме того, один из входов релейного двухвходового усилителя соединен с выходом первого блока нелинейности, а второй вход - с задатчиком тока возбуждения.
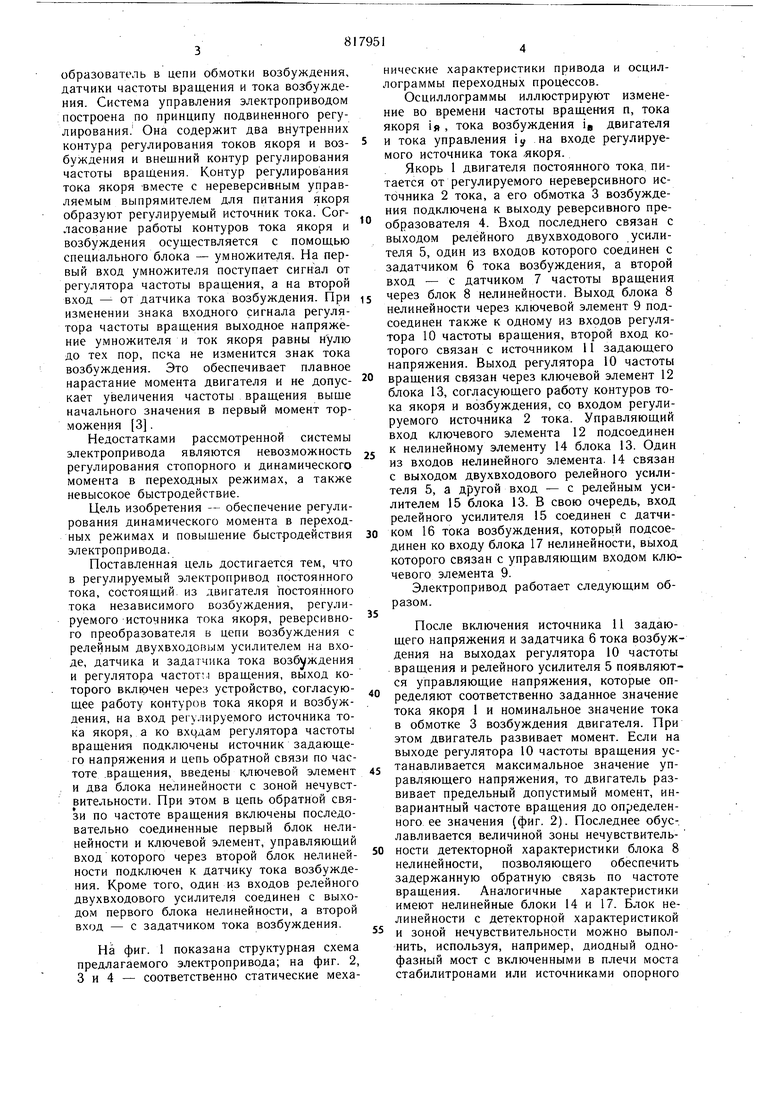
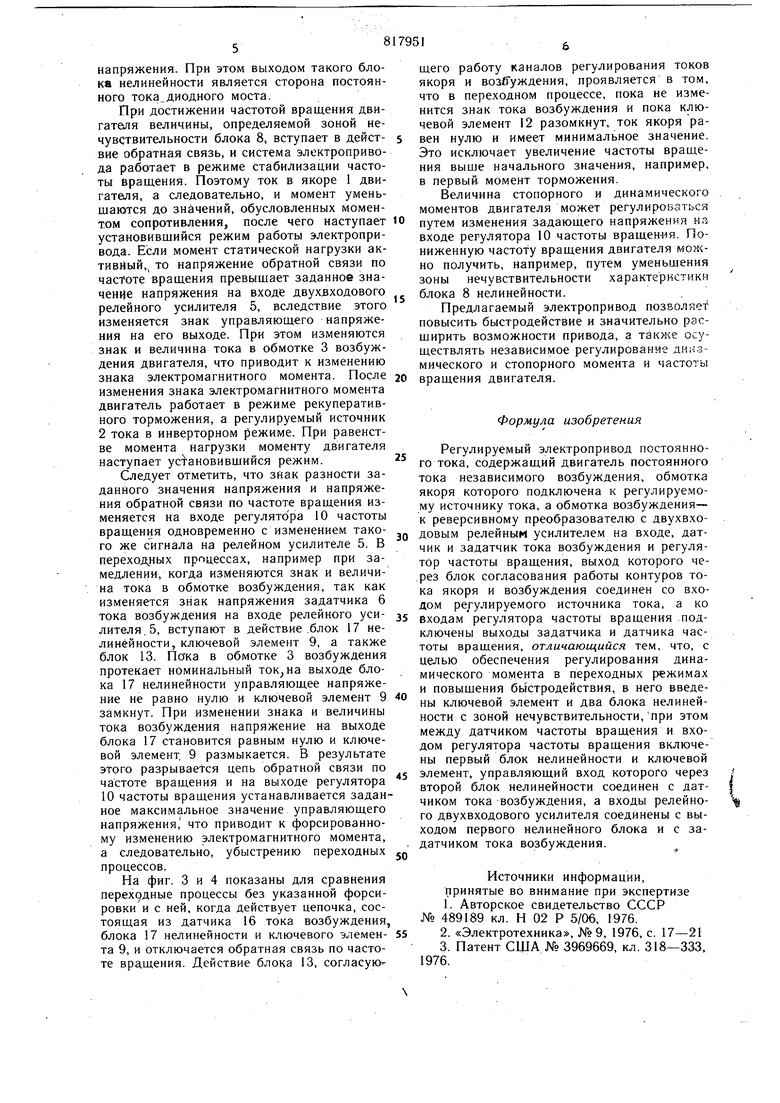
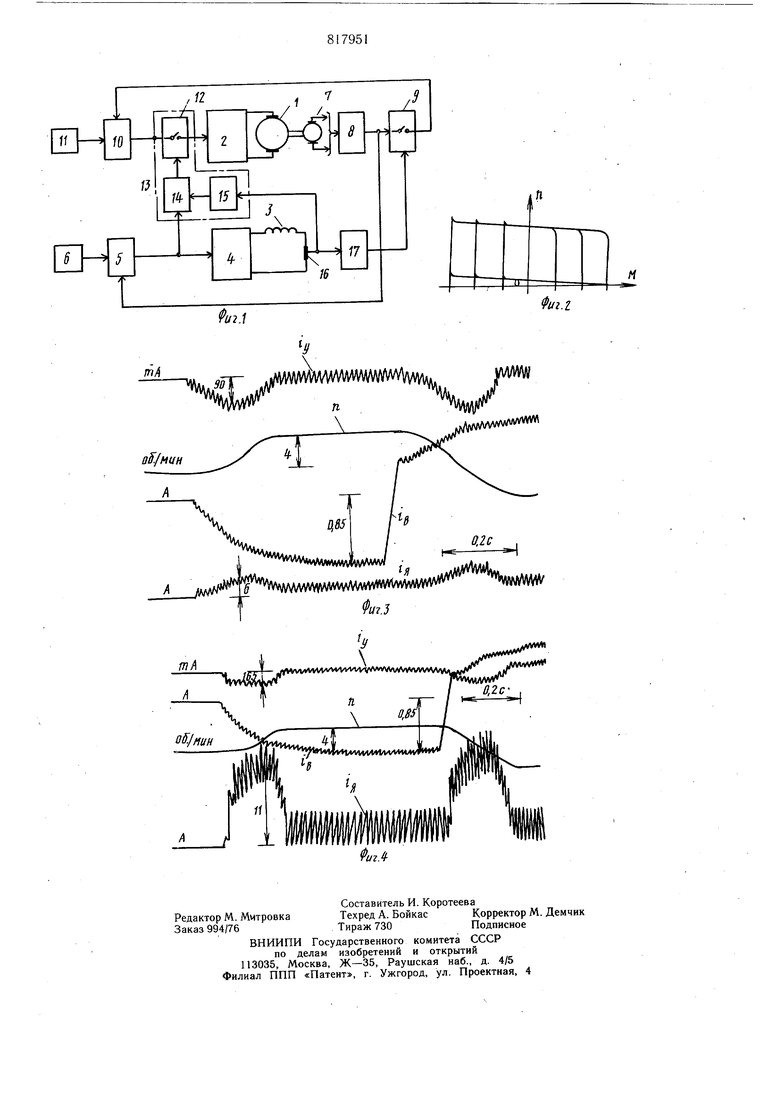
На фиг. 1 показана структурная схема предлагаемого электропривода; на фиг. 2, 3 и 4 - соответственно статические механические характеристики привода и осциллограммы переходных процессов.
Осциллограммы иллюстрируют изменение во времени частоты вращения п, тока якоря i , тока возбуждения ig двигателя
и тока управления iy на входе регулируемого источника тока якоря.
Якорь 1 двигателя постоянного тока питается от регулируемого нереверсивного источника 2 тока, а его обмотка 3 возбуждения подключена к выходу реверсивного преобразователя 4. Вход последнего связан с выходом релейного двухвходового усилителя 5, один из входов которого соединен с задатчиком 6 тока возбуждения, а второй вход - с датчиком 7 частоты вращения
через блок 8 нелинейности. Выход блока 8 нелинейности через ключевой элемент 9 подсоединен также к одному из входов регулятора 10 частоты вращения, второй вход которого связан с источником 11 задающего напряжения. Выход регулятора 10 частоты
0 вращения связан через ключевой элемент 12 блока 13, согласующего работу контуров тока якоря и возбуждения, со входом регулируемого источника 2 тока. Управляющий вход ключевого элемента 12 подсоединен к нелинейному элементу 14 блока 13. Один из входов нелинейного элемента. 14 связан с выходом двухвходового релейного усилителя 5, а другой вход - с релейным усилителем 15 блока 13. В свою очередь, вход релейного усилителя 15 соединен с датчи0 ком 16 тока возбуждения, который подсоединен ко входу блока 17 нелинейности, выход которого связан с управляющим входом ключевого элемента 9.
Электропривод работает следующим образом.
После включения источника 11 задающего напряжения и задатчика 6 тока возбуждения на выходах регулятора 10 частоты . вращения и релейного усилителя 5 появляются управляющие напряжения, которые оп ределяют соответственно заданное значение тока якоря 1 и номинальное значение тока в обмотке 3 возбуждения двигателя. При этом двигатель развивает момент. Если на выходе регулятора 10 частоты вращения устанавливается максимальное значение управляющего напряжения, то двигатель развивает предельный допустимый момент, инвариантный частоте вращения до определенного ее значения (фиг. 2). Последнее обуславливается величиной зоны нечувствительности детекторной характеристики блока 8 нелинейности, позволяющего обеспечить задержанную обратную связь по частоте вращения. Аналогичные характеристики имеют нелинейные блоки 14 и 17. Блок нелинейности с детекторной характеристикой и зоной нечувствительности можно выполнить, используя, например, диодный однофазный мост с включенными в плечи моста стабилитронами или источниками опорного напряжения. При этом выходом такого блока нелинейности является сторона постоянного тока диодного моста. При достижении частотой вращения двигатешя величины, определяемой зоной нечувствительности блока 8, вступает в деиствне обратная связь, и система электропривода работает в режиме стабилизации частоты бращения. Поэтому ток в якоре 1 двигателя, а следовательно, и момент уменьшаются до значений, обусловленных моментом сопротивления, после чего наступает установившийся режим работы электропривода. Если момент статической нагрузки активНый, то напряжение обратной связи по частоте вращения превышает заданное значение напряжения на вход1е двухвходового релейного усилителя 5, вследствие этого изменяется знак управляющего напряжения на его выходе. При этом изменяются знак и величина тока в обмотке 3 возбуждения двигателя, что приводит к изменению знака электромагнитного момента. После изменения знака электромагнитного момента двигатель работает в режиме рекуперативного торможения, а регулируемый источник 2 тока в инверторном режиме. При равенстве момента нагрузки моменту двигателя наступает установившийся режим. Следует отметить, что знак разности заданного значения напряжения и напряжения обратной связи по частоте вращения изменяется на входе регулятора 10 частоты вращения одновременно с изменением такого же сигнала на релейном усилителе 5. В переходных процессах, например при замедлении, когда изменяются знак и величина тока в обмотке возбуждения, так как изменяется знак напряжения задатчика 6 тока возбуждения на входе релейного усилителя.5, вступают в действие .блок 17 нелинёйности, ключевой элемент 9, а также блок 13. Пока в обмотке 3 возбуждения протекает номинальный выходе блока 17 нелинейности управляющее напряжение не равно нулю и ключевой элемент 9 замкнут. При изменении знака и величины тока возбуждения напряжение н-а выходе блока 17 становится равным нулю и ключевой элемент, 9 размыкается. В результате этого разрывается цепь обратной связи по частоте вращения и на выходе регулятора 10 частоты вращения устанавливается заданное максимальное значение управляющего напряжения, что приводит к форсированному изменению электромагнитного момента, а следовательно, убыстрению переходных процессов. На фиг. 3 и 4 показаны для сравнения переходные процессы без указанной форсировки и с ней, когда действует цепочка, состоящая из датчика 16 тока возбуждения, блока 17 нелинейности и ключевого элемента 9, и отключается обратная связь по частоте врдщения. Действие блока 13, согласую„щего работу каналов регулирования токов якоря и возбуждения, проявляется в том, что в переходном процессе, пока не изменится знак тока возбуждения и пока ключевой элемент 12 разомкнут, ток якоря равен нулю и имеет минимальное значение. Это исключает увеличение частоты вращения выше начального значения, например, в первый момент торможения. Величина стопорного и динамического моментов двигателя может регулироваться путем изменения задающего напряжения нз входе регулятора 10 частоты вращен-мя. Пониженную частоту вращения двигателя можно получить, например, путем уменьшения зоны нечувствительности характеристики блока 8 нелинейности. Предлагаемый электропривод пoзEoляef повысить быстродействие и значительно рзсщирить возможности привода, а также осуществлять независимое регулирование динамического и стопорного момента и частоты вращения двигателя. Формула изобретения Регулируемый электропривод постоянного тока, содержащий двигатель постоянного тока независимого возбуждения, обмотка якоря которого подключена к регулируемому источнику тока, а обмотка возбуждения- к реверсивному преобразователю с двухвходо ум релейным усилителем на входе, дат „ задатчик тока возбуждения и регуля р частоты вращения, выход которого че3 блок согласования работы контуров то ря и возбуждения соединен со вход, регулируемого источника тока, а ко входамрегулятора частоты вращения подг .- гtключены выходы задатчика и датчика частоты вращения, отличающийся тем, что, с целью обеспечения регулирования динамического момента в переходных режимах и повыщения быстродействия, в него введе ключевой элемент и два блока нелинейности с зоной нечувствительности,при этом между датчиком частоты вращения и входом регулятора частоты вращения включены первый блок нелинейности и ключевой элемент, управляющий вход которого через второй блок нелинейности соединен с датчиком тока возбуждения, а входы релейного двухвходового усилителя соединены с выходом первого нелинейного блока и с возбуждения, Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 489189 кл. Н 02 Р 5/06, 1976. 2.«Электротехника, №9, 1976, с. 17-21 3.Патент США № 3969669, кл. 318-333 1976.
