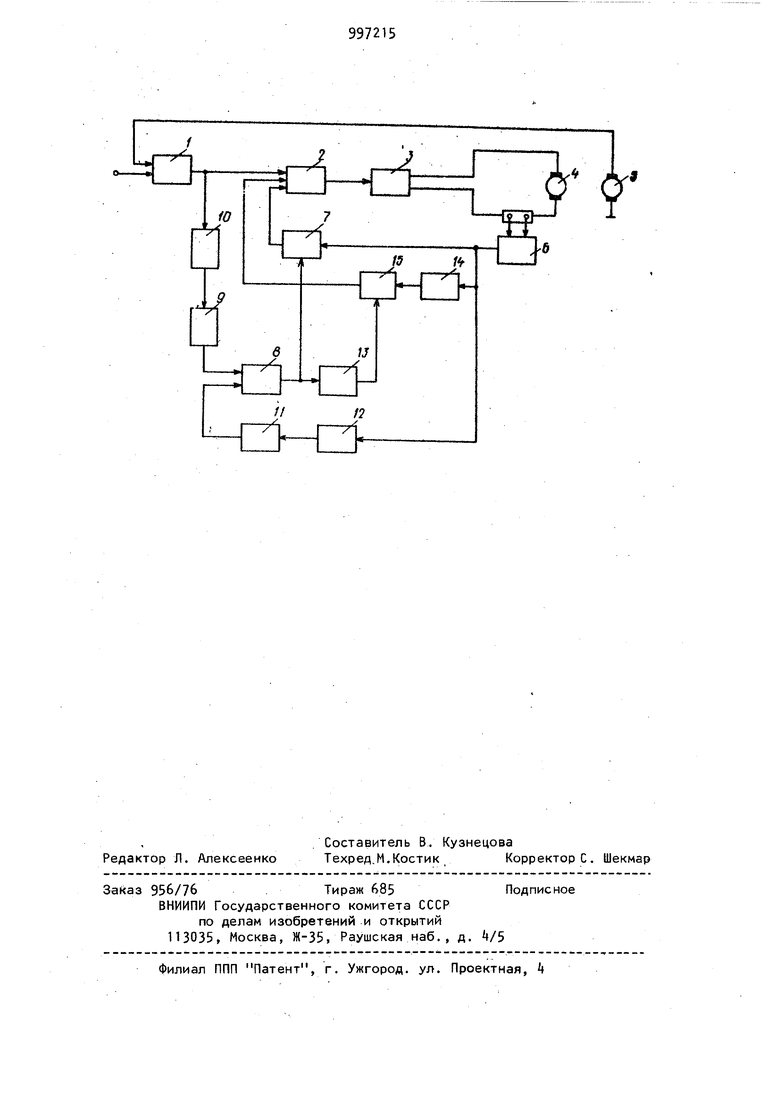
Изобретение относится к электротехнике и может быть использовано в электроприводах подач металлорежущих станков. По основному авт. св. № 896733 известен электропривод с подчиненным регулированием параметров, содержащий последовательно включенные регулятор частоты вращения, репулятор тока, вентильный преобразователь, двигатель, датчик частоты вра щения , подключенный к входу регулято ра частоты вращения, датчик тока, по соединенный к делителю напряжения, управляющий вход которого подключен к выходу сумматора, первым входом соединенного через нелинейный элемент с выходом регулятора частоты вращения, а вторым входом через второй нелинейный элемент - с выходом датчика тока 1 J. Недостатком указанного электропривода являются неудовлетворительны динамические характеристики, прояв.ляющиеся при малых амплитудах и больших скоростях изменения управ- / ляющего и возмущающего воздействий. Это объясняется тем, что в электропрнводе при малых частотах вращения двигателя в динамических режимах мала величина скорости нарастания тока якоря двигателя, которая, в основном, определяется при разомкнутом токовом контуре регулирования (за счет делителя напряжения) постоянной интегрирования регулятора тока, электромагнитной постЬянной якоря двигателя, а также типом и параметрами вентильного преобразователя. Особенно этот недостаток проявляется в электроприводах с широким диапазоном регулирования частоты вращения (более 10000) в нижней части диапазона регулирования частоты вращения и при использовании малойнерцмонных и высокомоментных двигателей постоянного тока (ПБВ, 99 ДК, ПГТ), допускающих большие скорости нарастания тока якоря. Цель изобретения - улучшение динамических характеристик электропривода с подчиненным регулированием параметров путем оптимизации процесса регулирования скорости нарастания тока якоря двигателя. Указанная цель .достигается тем, что в электропривод с подчиненным ре гулированием параметров дополнительно введены элемент НЕ и последовательно соединенные инвертирующий усилитель и второй делитель напряжения, при этом вход элемента НЕ соединен с выходом сумматора, вход инвертирующего усилителя подключен к датчику тока, а выход делителя н.пряжения, управляющим входом связанного с выходом элемента НЕ, соединен с входом регулятора тока, На чертеже изображена схема элект ропривода . Электропривод содержит последовательно включенные регулятор 1 частоты вращения, регулятор 1 тока якоря реверсивный вентильный преобразователь 3, двигатель +, датчик 5 частот вращения, подключенный к входу регулятора 1 частоты вращения, датчик 6 тока якоря, подсоединенный к делителю 7 напряжения, управляющий вход которого подключен к выходу сумматора 8, первым входом соединенного через нелинейный элемент 9 и вы рямитель 10 с выходом регулятора 1 частоты вращения, а вторым входом через второй нелинейный элемент 11 и выпрямитель 12 - с выходом датчика 6 тока. Электропривод содержит также элемент НЕ 13 и последовательно соединенные инвертирующий усилитель 14 и делитель 15 напряжения, при это вход элемента НЕ 13 соединен с выходом сумматора 8, вход инвертирующего усилителя k подключен к датчику 6 тока якоря, а выход делителя 15 напряжения, управляющим входом связанного с выходом элемента НЕ 13, со единен с входом регулятора 2 тока якоря. Электропривод работает следующим образом. Двигатель 4 питается от реверсивного вентильного преобразователя 3. Система регулирования с последовательным включением регулятора 1 частоты вращения и регулятора 2 тока является двухконтурной. Внешний контур регулирования частоты вращения двигателя k состоит из пропорционально-интегрального регулятора 1 частоты вращения и датчика 5 частоты вращения. Внутренний подчиненный контур регулирования тока якоря содержит датчик 6 тока якоря, преобразующий сигнал, который поступает от шунта в силовой цепи двигателя k, и пропорционально-интегральный регулятор 2 тока якоря. На вход регулятора 2 тока поступает сигнал с выхода регулятора 1 частоты вращения и сигнал обратной связи по току, величина и знак которого определяются режимом работы электропривода. Режим работы электропривода с подчиненным регулированием параметров определяется величиной задания на ток двигателя и величиной тока якоря двигателя. При воздействиях в электроприводе, меньших по величине зоны нечувствительности нелинейных элементов 9 и 11, сигнал на выходе сумматора 8 равен нулю. При этом делитель 7 напряжения включен, и величина отрицательной обра,НОЙ связи по току равна нулю. Выходной сигнал сумматора 8 также поступает на элемент НЕ 13, осуществляющий инвертирование выходного сигнала сумматора 8. При этом элемент НЕ 13 выдает сигнал 1, поступающий на управляющий вход второго делителя 15 напряжения, на вход которого подается сигнал положительной обратной связи по току с выхода инвертирующего усилителя I, подключенного к выходу датчика тока. При этом второй делитель 15 напряжения выключен и на вход регулятора 2 тока поступает с этого делителя сигнал положительной обратной связи по току. Настройка требуемой величины положительной обратной связи по току определяется исходя из обеспечения в электроприводе максимальной скорости нарастания тока якоря двигателя и минимизации величины динамического провала скорости при набросе момента статической нагрузки, а также обеспечения динамической устойчивой работы электропривода во всем диапазоне регулирования частоты вращения и нагрузок электродвигателя. При этом в электроприводе скорость нарастания тока якоря двигателя максимальна и динамические характеристики
электропривода с подчиненным регулированием параметров близки к предельным как по управляющему, так и по возмущающему воздействию.
При увеличении воздействий в электроприводе с подчиненным регулированием параметров, т.е выходных сигналов датчика 6 тока или регулятора 1 частоты вращения,превышающих величину зоны нечувствительности нелинейного элемента 9 или нелинейного элемента 11, сигналы поступают на вход сумматора 8, и на выходе сумматора 8 сигнал равен 1. При этом делитель 7 напряжения выключается, тем самым подается сигнал отрицательной обратной связи по току на вход регулятора 2 тока.
На выходе элемента НЕ 13 сигнал равен нулю в связи с тем, что на выходе сумматора 8 сигнал 1 и второй делитель напряжения 15 включается, тем самым сигнал положительной обратной Связи по току равен нулю. И в этом режиме в электроприводе на вход регулятора 2 тока подается сигнал отрицательной обратной связи по току, обеспечивающий эффективное ограничение скорости нарастания тока якоря двигателя и ограничение максимально допустимого тока якоря двигателя на заданном уровне.
Таким образом, происходит формирование оптимальной токовой диаграммы в электроприводе в динамических
режимах. При малых изменениях зада чия на ток якоря двигателя и при мапых значениях тока якоря двигателя скорость нарастания тока якоря двигателя имеет максимальное значение , что является допустимым. При этом в электроприводе с подчиненным регулированием параметров формируется, максимальный по быстродейстВИЮ и оптимальный по перерегулированию переходный процесс, причем динамические характеристики стабильны в широком диапазоне регулирования частоты вращения двигателя.
Формула изобретения
Электропривод с подчиненным регулированием параметров по авт. св.
ff 896733, о т л и чающийся тем, что, с целью улучшения динамических характеристик в него введены элемент НЕ и последовательно соединенные инвертирующий усилитель и
делитель напряжения, при этом вход элемента НЕ соединен с выходом сумматора, вход инвертирующего усилителн подключен к датчику тока, а выход делителя напряжения, управляющим В1(дом связанного с выходом элемента Н|, соединен с входом регулятора тока.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 896733, кл. Н 02 Р 5/06, 1980.

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод с подчиненным регулированием параметров | 1979 |
|
SU896733A1 |
| Электропривод с подчиненным регулированием параметров | 1983 |
|
SU1108593A2 |
| УСТРОЙСТВО КОМБИНИРОВАННОГО ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ЭКСКАВАТОРА | 1990 |
|
RU2030521C1 |
| Устройство для регулирования тока якоря электродвигателя | 1976 |
|
SU656169A1 |
| Вентильный электродвигатель | 1983 |
|
SU1141526A1 |
| Устройство для управления электроприводом постоянного тока | 1981 |
|
SU1001405A1 |
| Способ управления автономнымэлЕКТРОпРиВОдОМ пОСТОяННОгО ТОКАгРузОпОд'ЕМНОгО МЕХАНизМА и уСТРОйСТВОдля ЕгО РЕАлизАции | 1979 |
|
SU843139A1 |
| Электропривод постоянного тока | 1983 |
|
SU1115188A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Реверсивный тиристорный электропривод с двухзонным регулированием | 1977 |
|
SU692043A1 |