Изобретение относится к электро технике и может найти применение в тех отраслях техники, где требуется обеспечивать поступательные перемещения различных объектов и исполнительных органов машин.
Известно устройство для управления линейным электрод вига те.лем постоянного тока с многополюсным индуктором г каждый полюс которого снабжен обмоткой возбуждения, и якорем с обмоткой управления, соединенной с коллектором, подключающим якорь к источнику постоянного тока jjlj.
Однако при больших перемещениях якоря, превышающих длину самого якоряj участвуют в создании движут щегося усилия только те полюсы, пор которыми в данный момент находится якорь, остальные полюса не работают и бесполезно расходуют электрическую энергию, что резко снижает КПД линейных электродвигателей постоянного тока, используемых при больших перемещениях якоря.
Наиболее близким к предлагаемому является устройство для управления линейным электродвигателем постоянного тока с многоплюсным индукторол каждый полюс которого снабжен обмот
кой возбуждения, и якорем с обмоткой управления, подключенной к коллектору, содержащее датчики положения и скорости якоря и многоканальный коммутатор обмоток возбуждения с ключевыми элементами, связанными с датчиками положения якоря f 2 ;}.
Датчик положения при движении якоря подключает обмотку возбужде10ния полюса, к которому подходит якорь, и отключает обмотку возбуждения полюса, пройденного якорем.
Недостатком, известного устройства является невозможность достижений
15 высоких скоростей движения якоря, что обусловлено инерцией обмоток возбуждения. При высоких скоростях движения якорь может пройти полюс раньше, чем в нем установится номи20нальный поток и не сможет развить необходимого усилия. Причем с ростом скорости движения этот недостаток будет сказываться в большей степени,
Цель изобретения - повышение КПД
25 К увеличение скорости двигателя.
Поставленная цель достигается тем, что в устройство для нереверсивного управления линейным элект- |родвигателем постоянного тока с
0 многополюсным индуктором, каждый
полюс которого снабжен обмоткой возбуждения , и якорем с обмоткой управления, подключенной к коллектору содержащее датчики положения и скорости якоря и многоканальный коммутатор обмоток возбуждения с ключевыми элементами, связанными с датчиками положения якоря, введен преобр зователь аналог-код, а каждый канал коммутатора снабжен элементом ИЛИ и двухвходовыми элементами И, подключенными первыми входами к первому входу элемента ИЛИ этого же канала и выходу датчика положения предыдущего по ходу движения якоря полюса, вторыми входами - к выходам преобразователя аналох-код, соединенного своим входом с выходом датчика скорости якоря, а выходами к входам последующих по ходу движения якоря элементов ИЛИ, каждый из которых подключен выходом к входу ключевого элемента этого же канала коммутатора,
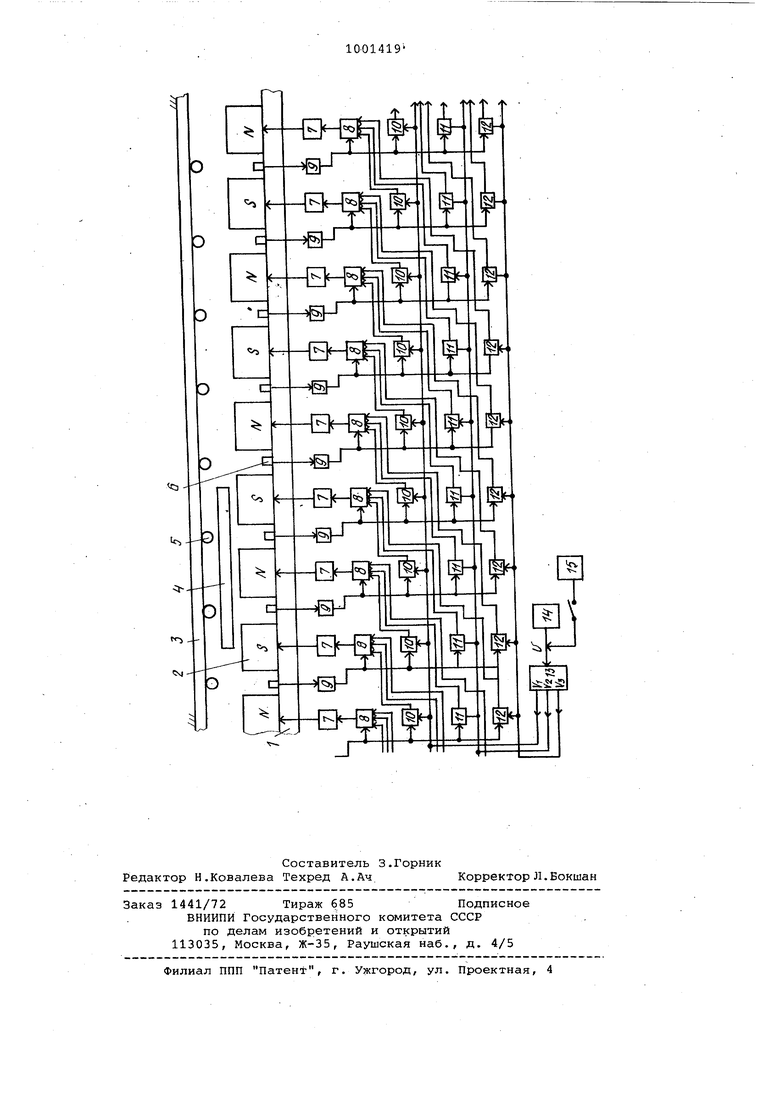
На чертеже приведена функциональная схема предлагаемого устройства.
Устройство включает в себя индуктор, имеющий станину 1 с установленными на ней полюсами 2 и ярмо 3, и поступательно движущийся якорь 4 с обмоткой управления и коллектором (не показаны). Датчики положения якоря содержат источники 5 света,- установленные на ярме 3 против фотоприемников 6, установленных между . полюсами 2.
Обмотка возбуждения каждого полюса 2 (не показана связана с источником питания постоянного тока чере ключевый элемент 7 коммутатора, каждый канал которого включает в себя логический элемент ИЛИ 8, инвертор 9 и логические элементы И 10 - 12. Общий для всех каналов коммутатора преобразователь аналог-код 13 подключен входом к датчику 14 скорости. или к источнику 15 постоянного тока через переключатель 16. Выходы V, VjL: Vo,, преобразователя аналог-код 13 подключены к вторым входам элементов И 10 - 12 всех каналов, аих первые входы - к выходам датчиков п ложения через инверторы 9. I
Устройство работает следующим
образом.
В исходном состоянии все фотоприемники6, кроме тех, над которым находится якорь 4, освещены и вырабатывают .единичный электрический сигнал. Соответственно на выходах инверторов 9, соединенных с этими Фотоприемниками, сигнал равен нулю и все связанные с ними через элементы ИЛИ 8 ключевые элементы 7 обестоны. Поэтому (обмотки возбуждения полсов 2 индуктора, над которыми не находится якорь 4, отключены.
На выходах инверторов 9, соединенных с затемненными фотоприемникам б появится электрический сигнал, который включает через элемент ИЛИ 8 и ключевой элемент 7 обмотку возбуждения последующего по ходу движения якоря полюса, смежного с возбужденным полюсом. Последующие по ходу движения якоря ключевые элементы 7 коммутатора заперты, поскольку на вторы входы элементов И 10 - 12 поступают запрещающие сигналы с выходом преобразователя аналог-код 13.
Таким образом в исходном состоянии будут включены обмотки возбуждения только тех полюсов, над которыми стоит якорь и первый по ходу движения полюс.-г
При подаче на обмотку управления якоря 4 двигателя напряжения создается движущая сила и якорь начнет движение.
На входе преобразователя аналогкод 13 появится сигнал, пропорционал ный скорости движения. При достижении определенного значения скорости единичный сигнал появится на выходе 1 преобразователя 13, что обеспечит подачу разрешающего сигнала на вторые входы элементов. И 10 всех каналов коммутатора. При этом единичный сигнал, вырабатываемый на выходе инвертора 9 затемненного фотоприемника 6, будет поступать не только на вход элемента ИЛИ 8 смежного канала, но и на вход элемента 8 последующего по ходу движения якоря канала.
Следовательно, в этом случае при затемнении очередного фотоприемника 6 возбуждаются два следующих по ходу движения якоря полюса 2, т.е. создается опережение включения обмоток возбуждения на два. полюса.
При дальнейшем увеличении скорости якоря 4 линейного двигателя единичный сигнал появится на выходе V преобразователя 13, что приведет к опережению включения обмоток возбуждения на три полюса и т.д. Число полюсов, включаемых с опережением, определяется числом элементов И в каждом канале коммутатора и числом выходов преобразователя аналог-код 1
При уменьшении скорости движения якоря 4 устройство автоматически уменьшает число полюсов, возбуждаемых с опережением.
При прохождении задней кромки якоря 4 над соответствующим фотоприемником б обеспечивается запирание ключевых элементов 7 предыдущих по ходу движения каналов.
В тех случаях, когда нет необхо димости управлять опережением включения полюсов в функции скорости якоря, можно устанавливать постоянную
степень опережения, включив переключатель 16 и подобрав соответствующее напряжение на выходе источника питания 15. Тахогенератор 14 должен быть при этом отключен.
Необходимую степень опережения включения полюсов индуктора, определяемую числом полюсов, включаемых заранее.. перед движущимся со скот-ростью V якорем, можно определить из соотношения
v,ly±§VM
г-.где Та - постоянная времени обмотк
- возбуждения}
tr - полюсное деление электродвигателя.
Предлагаемое устройство осуществляет коммутацию обмоток возбуждения полюсов индуктора по положению якоря и автоматически вводит опережение включения полюсов в зависимости от скорости движения якоря, что позволяет повысить скорость перемещения якоря, сохранив при этом величину тягового усилия, увеличить быстродействие машины. Управляемое опережение включения полюсов обеспечивает получение наибольшего КПД машины за счет выбора оптимального режима работы.
Формула изобретения Устройство для нереверсивного управления линейным электродвигател
.постоянного тока с многополюсным индуктором, каждый полюс которого снаОжен обмоткой возбуждения и якорем с обмоткой управления, подключен ной к коллектору, содержащее датчик положения и скоррсти якоря и многоканальный коммутатор обмоток возбуждения с ключевыми элементами, связанными с датчиками полОже ния якоря, отличающееся тем, что, с целью повышения КПД и увеличения скорости двигателя, введен преобразователь аналог- код, а каждый канал коммутатора снабжён элементом ИЛИ и двухвходовыми элементами И, подключенными первыми входами к первому вход:- элемента ИЛИ этого же канала и выходу датчика пол ложения предыдущего по ходу движения якоря полюса, вторыми входами к выходам преобразователя аналогкод, соединённого своим входом с.выходом датчика скорости якоря, а выходами - к входам последующих по ходу движения якоря элементов ИЛИ, каждый из которых подкл1бчен выходом к входу ключевого элемента этого же канала коммутатора.
Источники информации, принятые во внимание при экспептизе
1.Патент США 3136934, кл. 318-130, 1972.
2.Патент Франции 1521402, кл. Н 02 К, 1971.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ ВО ВРАЩАТЕЛЬНОЕ | 1991 |
|
RU2015609C1 |
| Автономная система электрооборудования с вентильным электродвигателем | 1987 |
|
SU1534662A1 |
| Автономная система электрооборудования с вентильным электродвигателем | 1987 |
|
SU1457140A1 |
| ТРЁХВХОДОВАЯ АКСИАЛЬНАЯ ГЕНЕРАТОРНАЯ УСТАНОВКА | 2015 |
|
RU2589730C1 |
| АКСИАЛЬНЫЙ УПРАВЛЯЕМЫЙ БЕСКОНТАКТНЫЙ ДВИГАТЕЛЬ-ГЕНЕРАТОР | 2015 |
|
RU2601952C1 |
| Автономная система электрооборудования | 1987 |
|
SU1621124A1 |
| Стабилизированная трёхвходовая аксиальная генераторная установка | 2017 |
|
RU2633359C1 |
| Вентильный электродвигатель | 1987 |
|
SU1480046A1 |
| Стенд линейных ускорений | 1981 |
|
SU1027628A1 |
| Вертикально-осевая трёхвходовая аксиальная генераторная установка | 2020 |
|
RU2748225C1 |