Изобретение относится к электротехнике, а именно к регулируемым машинам переменного тока различного назначения, питаемым-от преобразователей частоты, и может быть использовано в автономной системе электрооборудования транспортных средств с вентильными электродвигателями.
Целью изобретения является улучшение энергетических, динамических показателей и расширение диапазона регулирования частоты вращения за счет уменьшения пульсаций вращающего момента вентильного электродвигателя.
На фиг. 1 представлена функциональная схема автономной системы электрооборудования с вентильным электродвигателем; на фиг. 2 - функциональная схема блока вычислений потокосцеплений; на фиг. 3 - функцио- нальная схема блока формирования потокосцепления якоря; на фиг. 4 и 5 - векторные диаграммы изображающих векторов генератора переменного тока и электромеханического преобразователя.
Автономная система электрооборудования с вентильным электродвигателем содержит 2р-|-пслюсный mi-фазный генератор 1 переменного тока (фиг. 1) и вентильный электродвигатель на базе 2р2 полюсного та-фаз- ного электромеханического преобразователя 2, подключенные обмотками якорей к соответствующим выходам преобразователя 3 частоты, управляющие цепи которого соединены с выходами системы 4 управления, выполненной с входами регулирования угла запаздывания и угла опережения, с двумя опорными входами и двумя двухфазными выходами, mi- фазный датчик 5 тока якоря генератора 1 переменного тока, т2-фазный датчик 6 тока якоря электромеханического преобразователя 2 и
датчики 7 и 8 углового положения роторов генератора 1 переменного тока и электромеханического преобразователя 2, подключенные выходами к соответствующим
опорным входам системы 4 управления,
Автономная система электрооборудования содержит, кроме того, два блока 9 и 10 вычислений потокосцеплений, каждый из которых снабжен многофазным входом,
опорным входом, двумя входами для составляющих тока и двумя выходами, пропорционально-интегральные регуляторы 11-14 тока, усилители 15-18 тока.
Каждая из фазных обмоток якорей 19 и
20 генератора 1 переменного тока и электромеханического преобразователя 2 выполнена из двух параллельно-встречно включенных ветвей с взаимным сдвигом их осей на угол тг/pi у генератора 1 илг/р2 у преобразователя 2.
Индуктор 21 генератора 1 переменного тока выполнен с продольной обмоткой 22 возбуждения, ось которой совпадает с осью полюсов индуктора 21, и поперечной обмоткой 23 возбуждения, установленной на полюсах, сдвинутых относительно полюсов индуктора на электрический угол л/2.
Индуктор 24 преобразователя 2 выпол- нен с продольной обмоткой 25 возбуждения, ось которой совпадает с осью полюсов индуктора 24, и поперечной обмоткой 26 возбуждения, установленной на полюсах, сдвинутых относительно полюсов «ндукто-. ра 24 на электрический угол л/ 2.
Выходы усилителей 15 и 16 тока через введенные датчики 27 и 28 продольного и поперечного токов подключены соответственно к выводам продольной 22 и попереч- ной 23 обмоток индуктора 21,
Выходы усилителей 17 и 18 тока через датчики 29 и 30 продольного и поперечного токов подключены соответственно к выво- дам продольной 25 и поперечной 26 обмоток индуктора 24.5
Входы усилителей 15-18 тока подключены к выходам соответствующих пропорционально-интегральных регуляторов 11-14 тока.
Первые входы регуляторов 11 и 12 тока 10 подключены к выходам блока 9 вычислений, а вторые входы объединены с соответствующими входами для составляющих тока блока 9 вычислений и подключены к выходам датчиков 27 и 28 тока.15
Первые входы регуляторов тока 13, 14 подключены к выходам блока вычислений 10, а вторые входы объединены с соответствующими входами для составляющих тока блока вычислений 10 и подключены к выхо- 20 дам датчиков тока 29, 30.
Первый двухфазный выход системы 4 управления подключен к соответствующему двухфазному опорному входу блока 9 вычис- лений, многофазный вход которого соеди- 25 нен с соответствующими выходами гщ-фазного датчика 5 тока, Второй двухфазный выход системы 4 управления подключен к соответствующему двухфазному опорному входу блока 10 вы- 30 числений, многофазный вход которого сое- динен с соответствующими выходами т2-фазного датчика 6 тока.
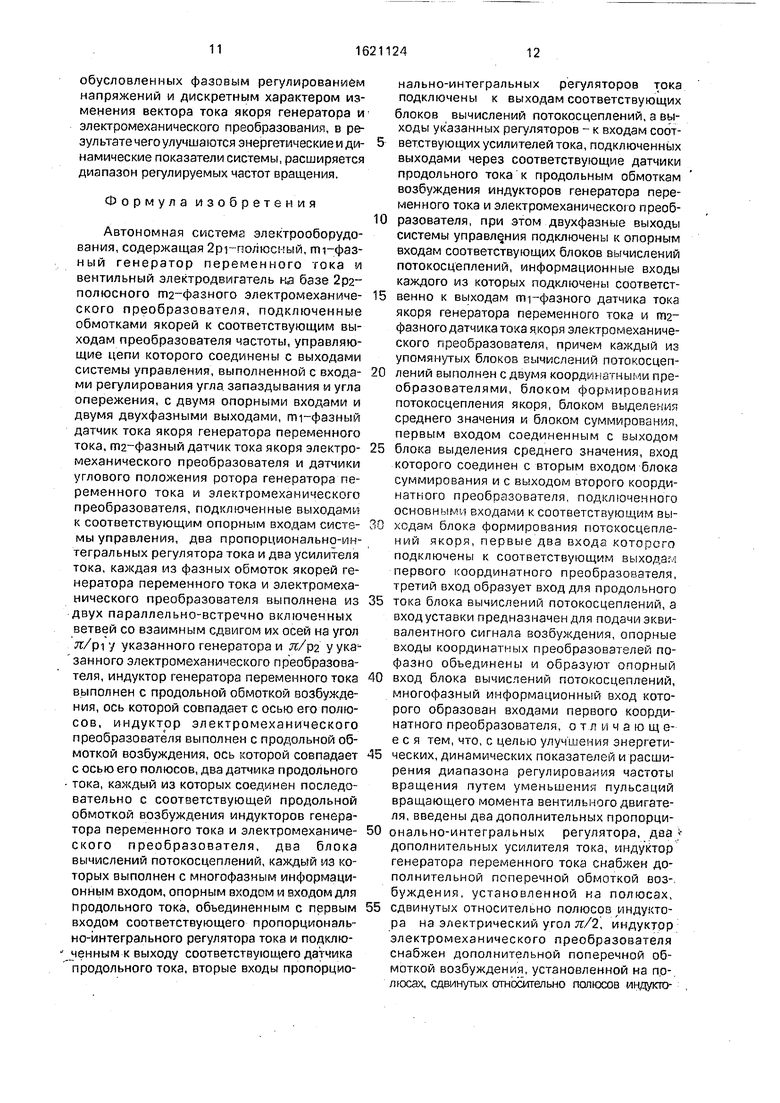
Каждый на блоков 9 и 10 вычислений пото- косцеплений выполнен с координатными пре- 35 образователями 31 и 32 (фиг. 2), блоком 33 формирования потокосцеплений якоря, блоком 34 выделения среднего значения, блоком 35 суммирования и блоками 35 и 37 умножения. Первые входы блоков 36 и 37 умножения 40 соединены между собой и подключены к выходу блока 35 суммирования, первым входом соединенного с выходом блока 34 выделения среднего значения. Вход последнего соединен с вторым входом блока 35 сумммирования и с 45 выходом координатного преобразователя 32, подключенного основными входами к соответствующим выходам блока 33 формирования потокосцеплений якоря, первые два входа которого подключены к соответствующим выхо- 50 дэгл коордикитного преобразователя 31.
Другие два входа блока 33 формирования потокосцеплений якоря образуют соответствующие входы для составляющих тока блоков 9 и 10 вычислений, а вход уставки 55 предназначен для подачи эквивалентного сигнала возбуждения постоянных магнитов по продольной оси.
Вторые входы блоков 36 и 37 умножения, соединенные с соответствующими
опорными входами координатных преобразователей 31 и 32, образуют двухфазный опорный вход каждого из блоков 9 и 10 вычислений. Многофазный вход и выходы каждого из блоков 9 и 10 образованы соответственно входами координатного преобразователя 31 и выходами блоков 36 и 37 умножения.
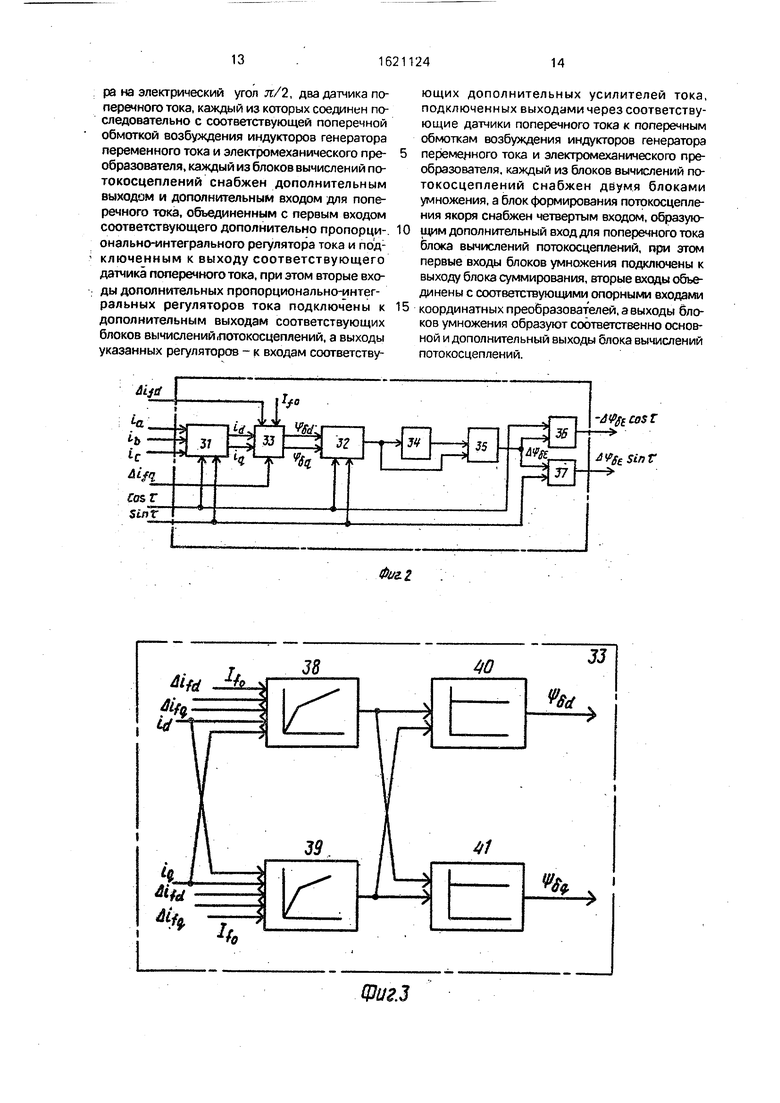
Блок 33 формирования потокосцепле- ния якоря содержит нелинейные элементы 38 и 39 (фиг. 3), определяющие зависимость основного потока от результирующей намагничивающей силы, и масштабные элементы 40 и 41.
Автономная система электрооборудования (АЭС) работает следующим образом.
При фазовом регулировании напряжений генератора 1 и электромеханического преобразователя (ЭМП) 2 эквивалентный выпрямленный ток (модуль вектора тока якоря) ЭМП 2 содержит кроме постоянной составляющей и переменные составляющие тока, которые и являются причиной пульсаций вращающего момента и ухудшения энергетических показателей вентильного двигателя (ВД). Кроме того, вращающий момент ВД является пульсирующим даже при идеально сглаженном эквивалентном выпрямленном токе ЭМП 2 ввиду дискретного характера изменения положения вектора тока якоря ЭМП 2, что приводит при низких частотах вращения к явлению шагания ВД, ограничивая тем самым диапазон регулирования частоты вращения. Дискретный характер изменения положения вектора тока якоря генератора 1 вызывает пульсации электромагнитного момента генератора 1 и приводит к ухудшению его энергетических показателей.
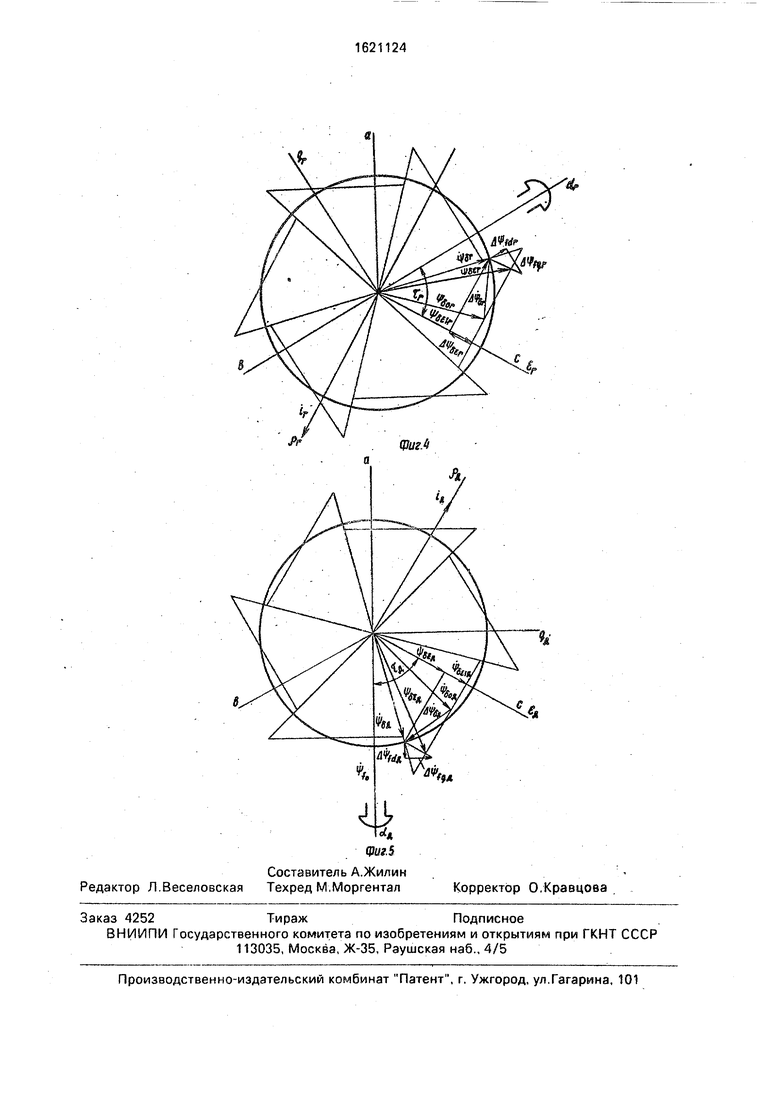
Пульсации эквивалентного выпрямленного тока и момента, обусловленные фазовым регулированием напряжения ЭМП 2 и дискретным характером изменения вектора тока якоря ЭМП 2, можно устранить, если проекцию вектора основного потокосцепле- ния якоря ЭМП 2 на направление Јд (фиг. 5), ортогональное вектору тока якоря ЭМП 21Д, поддерживать равной ее среднему значению путем регулирования токов возбуждения ЭМП 2 по продольной и поперечной рд осям, для чего необходимо компенсировать переменную составляющую проекции вектора основного потокос- цепления в выражении электромагнитного момента
Мд Оае1д+Л 5Јд)1д, (1) где 5е1д - среднее значение проекции вектора основного потокосцепления на направление.
Из диаграммы изображающих векторов (фиг. 5) необходимая величина потокосцеп- ления продольной обмотки 25 возбуждения ЭМП 2 определяется следующим образом: AV(5eA -созтд+
(2) + Aifdfl Xfdfl,
где гд
PQ - угол опережения включения при холостом ходе, определяемый установкой датчика 8 углового положения ротора ЭМП 2;
ifdfl, хгйд - ток возбуждения и индуктивное сопротиЁление рассеяния продольной обмотки 25 возбуждения ЭМП 2.
Необходимая величина потокосцепле- ния дополнительной поперечной обмотки 26 возбуждения ЭМП 2 равна
At/ fd д 4(3)
+ ДНдд ХОЧдд,
где A i f g д ,х (jf g д - ток возбуждения и индуктивное сопротивление рассеяния допол- нительной поперечной обмотки 26 возбуждения ЭМП 2.
Аналогично можно устранить пульсации эквивалентного выпрямленного тока и момента, обусловленные фазовым регулированием напряжения генератора 1 и дискретным характером изменения вектора тока якоря генератора 1. Для этого проекцию вектора основного потокосцепления якоря генератора 1 на направление Б г (фиг. 4), ортогональное вектору тока якоря ir, необходимо поддерживать равной ее среднему значению путем регулирования токов возбуждения генератора 1 по продольной dr и поперечной qr осям, для чего необходимо компенсировать переменную составляющую проекции вектора основного потокосцепления в выражении электромагнитного момента
Мг (# ЗБ1г+Д# 5ег)1г,
(4)
где среднее значение проекции вектора основного потокосцепления на направление ег.
Из диаграммы изображающих векторов (фиг. 4) необходимая величина потокосцепления продольной обмотки 22 возбуждения генератора 1 определяется следующим образом: cosrr +
(5)
+ Ai f dr X Of dr .
где гг ,
а о угол запаздывания включения при холостом ходе, определяемый установ- кой датчика 7 углового положения ротора генератора 1;
Aifdr.xafdr- ток возбуждения и индуктивное сопротивление рассеяния продольной обмотки -22 возбуждения генератора 1.
Необходимая величина потокосцепления дополнительной поперечной обмотки 23 возбуждения генератора 1 равна
15 slnrr +
+ AJfqr Xfff q Г,
(6)
где ifqr, xcrfqr - ток возбуждения и индук- 0 тивное сопротивление рассеяния дополнительной поперечной обмотки 22 возбуждения генератора 1.
Использование продольных и поперечных обмоток возбуждения позволяет наибо- 5 лее точно компенсировать переменные составляющие проекций векторов основных потокосцеплений генератора 1 и ЭМП 2, так как при этом возможно сформировать необходимый вектор как по величине, так и по 0 фазе.
Диаграммы изображающих векторов на фиг. 4, 5 построены без учета углов коммутации тока в фазах генератора 1 и ЭМП 2. При наличии углов коммутации выражения (2), (3) 5 и(5), (6) несколько изменяются. При этом блоки 9 и 10 вычисления по действительным значениям токов (с учетом углов коммутации) и угловым положениям роторов генератора 1 и ЭМП 2 определяют проекции переменных со- 0 ставляющих основного потокосцепления А V б Б д А 5 Б г - а регуляторы 11-14 тока поддерживают с достаточной для практики точностью проекции векторов основных потокосцеплений 5ед на уровне, соответствующем их средним значениям, включая и коммутационные интервалы.
Первые слагаемые в выражениях (2), (3), (5) и (6) формируются с помощью блоков § и п 10 вычисления, выходные сигналы которых поступают на первые входы пропорционально-интегральных регуляторов 11-14, на вторые входы которых подаются сигналы, ( пропорциональные токам возбуждения прое дольных 22 и 23 и поперечных 25 и 26 обмо- ток возбуждения генератора 1 и ЭМП 2. Масштабные коэффициенты на входах регуляторов 11-14 выбираются так, что суммарный сигнал определяется выражениями (2), (3), (5) и (6). За счет интегральных составляющих на выходах регулятора вырабатывается сигнал, обеспечивающий после усиления усилителями 15-18 тока напряжение на продольных 22 и 23 и поперечных 25 и 26 обмотках возбуждения генератора 1 и ЭМП 2, необходимое для поддержания проекций вектора основного потокосцепления якоря генератора 1иЭМП2 е г. e д науровне, равном их средним значениям Выбор соответствующих передаточных функций регуляторов 11-14 обеспечивает требуемую динамику процесса регулирования возбуждения.
Блоки 9 и 10 вычислений предназначены для определения переменных составляющих проекций векторов основных потокосцеплений генератора 1 и ЭМП 2 на оси, ортогональные векторам токов обмоток якорей генератора 1 и ЭМП 2, и формирования части потокосцеплений обмоток 22, 23 и 25, 26 возбуждения генератора 1 и ЭМП 2 согласно выражениям (2), (3). (5) и (6).
Первый координатный преобразователь 31 состоит из типовых множителей и суммирующих элементов и реализует преобразование тока якоря от фазовых компонентов к продольной и поперечной составляющим по сигналам датчиков 5 и 6 тока по сигналам углового положения роторов генератора 1 или ЭМП 2, поступающим из системы уравнения 4.
Формирование основных потокосцеплений якоря по осям d, q осуществляется в блоке 33 формирования продольной и поперечной составляющих потокосцеплений.
Нелинейные элементы 38 и 39 (фиг. 3) имеют одинаковые характеристики и определяют зависимость основного потока от результирующей намагничивающей
силы, т. е, ipd f(i). Намагничивающие силы И одной половины полюса определяются суммой н. с. по продольной и поперечной осям
11 ld +Aifd + fo +
+ fe-Oq+A f 0. а другой половины полюса h - разностью i2 fd +Aifd +lro ш а /1 i A i ч 5uJ -Oq+Alfq)Этим н.с. соответствуют потокосцепления Ц}, fa получаемые на выходах нелинейных элементов 38 и 39:
№ f(ii), Vu f(b).
0
5
0
5
0
5
0
5
0
5
Масштабные коэффициенты усилителей 40 и 41 выбираются так, что суммарные сигналы на выходах этих усилителей определяются выражениями:
0,5( +V2); 0.5(1 V2)
Составляющие основного потокосцепления по осям поступают во второй координатный преобразователь 32, состоящий из типовых множительных и суммирующих элементов и осуществляющий переход от продольной и поперечной составляющих основного потокосцепления к составляющей основного потокосцепления Т/ бе, ортогональной вектору тока якоря, по следующему соотношению:
(5d cos т-(5 q sin r.
Составляющая основного потокосцепления pfi g поступает на вход блока 34 выделения среднего значения, на выходе которого получаем среднее значение основного потокосцепления 1рд0.
Блок 34 может быть выполнен в виде интегратора. Переменную составляющую основного потокосцепления получаем на входе блока 35 суммирования как разность составляющих трде, подаваемых на его входы. На выходе блока 36 умножения получается сигнал, необходимый для формирования потокосцепления продольной обмотки 22 или 25 возбуждения генератора 1 или ЭМП 2
А Д(5Е COST,
а на выходе блока 37 умножения получается сигнал, необходимый для формирования потокосцепления дополнительной поперечной обмотки 23 или 26 возбуждения генератора 1 или ЭМП 2
В sin г.
Таким образом, введение в автономную систему электрооборудования дополнительных поперечных обмоток возбуждения, размещенных на индукторах генератора переменного тока и электромеханического преобразователя и соответствующих регуляторов тока к ним, обеспечивает более эффективное в сравнении с известным; решением уменьшение пульсаций эквивалентного выпрямленного тока и момента,
обусловленных фазовым регулированием напряжений и дискретным характером изменения вектора тока якоря генератора и электромеханического преобразования, в результате чего улучшаются энергетические и динамические показатели системы, расширяется диапазон регулируемых частот вращения.
Формула изобретения
Автономная система электрооборудования, содержащая 2р1-полюспый, гщ-фаз- ный генератор переменного гока и вентильный электродвигатель на базе 2р2 полюсного гп2-фазного электромеханического преобразователя, подключенные обмотками якорей к соответствующим выодам преобразователя частоты, управляющие цепи которого соединены с выходами истемы управления, выполненной с входами регулирования угла запаздывания и угла пережения, с двумя опорными входами и вумя двухфазными выходами, ггц-фазный атчик тока якоря генератора переменного ока, гП2-фэзный датчик тока якоря электромеханического преобразователя и датчики углового положения ротора генератора переменного тока и электромеханического преобразователя, подключенные выходами к соответствующим опорным входам системы управления, два пропорционально-инегральных регулятора тока и два усилителя ока, каждая из фазных обмоток якорей генератора переменного тока и электромеханического преобразователя выполнена из вух параллельно-встречно включенных ветвей со взаимным сдвигом их осей на угол 7Г/Р1 у указанного генератора и тг/р2 у указанного электромеханического преобразователя, индуктор генератора переменного тока выполнен с продольной обмоткой возбуждения, ось которой совпадает с осью его полюсов, индуктор электромеханического преобразователя выполнен с продольной обмоткой возбуждения, ось которой совпадает с осью его полюсов, два датчика продольного тока, каждый из которых соединен последовательно с соответствующей продольной обмоткой возбуждения индукторов генератора переменного тока и электромеханического преобразователя, два блока вычислений потокосцеплений, каждый из которых выполнен с многофазным информационным входом, опорным входом и входом для продольного тока, объединенным с первым входом соответствующего пропорционально-интегрального регулятора тока и подключенным к выходу соответствующего датчика продольного тока, вторые входы пропорционально-интегральных регуляторов тока подключены к выходам соответствующих блоков вычислений потокосцеплений,з выходы указанных регуляторов - к входам соответствующих усилителей тока, подключенных выходами через соответствующие датчики продольного тока к продольным обмоткам возбуждения индукторов генератора переменного тока и электромеханическою преоб0 разователя, при этом двухфазные выходы системы управления подключены к опорным входам соответствующих блоков вычислений потокосцеплений, информационные входы каждого из которых подключены соответст5 венно к выходам mi-фазного датчика тока якоря генератора переменного тока и т2 фазного датчика тока якоря электромеханического преобразователя, причем каждый из упомянутых блоков вычислений потокосцеп0 лений выполнен с двумя координатными пре- образователями, блоком формирования потокосцепления якоря, блоком выделения среднего значения и блоком суммирования, первым входом соединенным с выходом
5 блока выделения среднего значения, вход которого соединен с вторым входом блока суммирования и с выходом второго координатного преобразователя, подключенного основными входами к соответствующим вы0 ходам блока формирования потокосцеплений якоря, первые два входа которого подключены к соответствующим выходам первого координатного преобразователя, третий вход образует вход для продольного
5 тока блока вычислений потокосцеплений, а вход уставки предназначен для подачи эквивалентного сигнала возбуждения, опорные входы координатных преобразователей по- фазно объединены и образуют опорный
0 вход блока вычислений потокосцеплений, многофазный информационный вход которого образован входами первого координатного преобразователя, отличающееся тем, что, с целью улучшения энергети5 ческих, динамических показателей и расширения диапазона регулирования частоты вращения путем уменьшения пульсаций вращающего момента вентильного двигателя, введены два дополнительных пролорци0 онально-интегральных регулятора, даа дополнительных усилителя тока, индуктор генератора переменного тока снабжен дополнительной поперечной обмоткой возбуждения, установленной на полюсах,
5 сдвинутых относительно полюсов индуктора на электрический угол я/2, индуктор электромеханического преобразователя снабжен дополнительной поперечной обмоткой возбуждения, установленной на полюсах, сдвинутых относительно полюсов индуктоpa на электрический угол л/2, два датчика поперечного тока, каждый из которых соединен последовательно с соответствующей поперечной обмоткой возбуждения индукторов генератора переменного тока и электромеханического преобразователя, каждый из блоков вычислений по- токосцеплений снабжен дополнительным выходом и дополнительным входом для поперечного тока, объединенным с первым входом соответствующего дополнительно пропорционально-интегрального регулятора тока и под- ключенным к выходу соответствующего датчика поперечного тока, при этом вторые входы дополнительных пропорционально-интегральных регуляторов тока подключены к дополнительным выходам соответствующих блоков вычислений .потокосцеплений, а выходы указанных регуляторов - к входам соответствующих дополнительных усилителей тока, подключенных выходами через соответствующие датчики поперечного тока к поперечным обмоткам возбуждения индукторов генератора
переменного тока и электромеханического преобразователя, каждый из блоков вычислений по- токосцеплений снабжен двумя блоками умножения, а блок формирования потокосцепле- ния якоря снабжен четвертым входом, образующим дополнительный вход для поперечного тока блока вычислений потокосцеплений, при этом первые входы блоков умножения подключены к выходу блока суммирования, вторые входы объединены с соответствующими опорными входами
координатных преобразователей, а выходы блоков умножения образуют соответственно основной и дополнительный выходы блока вычислений потокосцеплений.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автономная система электрооборудования с вентильным электродвигателем | 1987 |
|
SU1534662A1 |
| Автономная система электрооборудования с вентильным электродвигателем | 1987 |
|
SU1457140A1 |
| Вентильный электродвигатель | 1987 |
|
SU1480046A1 |
| Способ компенсации пульсаций вращающего момента вентильного электродвигателя | 1986 |
|
SU1480045A1 |
| Электромеханический преобразователь вентильного электродвигателя | 1987 |
|
SU1626308A1 |
| ЭЛЕКТРОПРИВОД С СИНХРОННЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2092967C1 |
| Электропривод переменного тока | 1983 |
|
SU1169128A1 |
| Автономная система электрооборудования с вентильным электродвигателем | 1985 |
|
SU1356134A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Электропривод с асинхронным двигателем с фазным ротором | 1982 |
|
SU1083320A1 |
Изобретение относится к электротехнике, а именно к регулируемым машинам переменного тока различного назначения, питаемым от преобразователей частоты, и может быть использовано в автономной системе электрооборудования транспортных средств с вентильными электродвигателями Целью изобретения является улучшение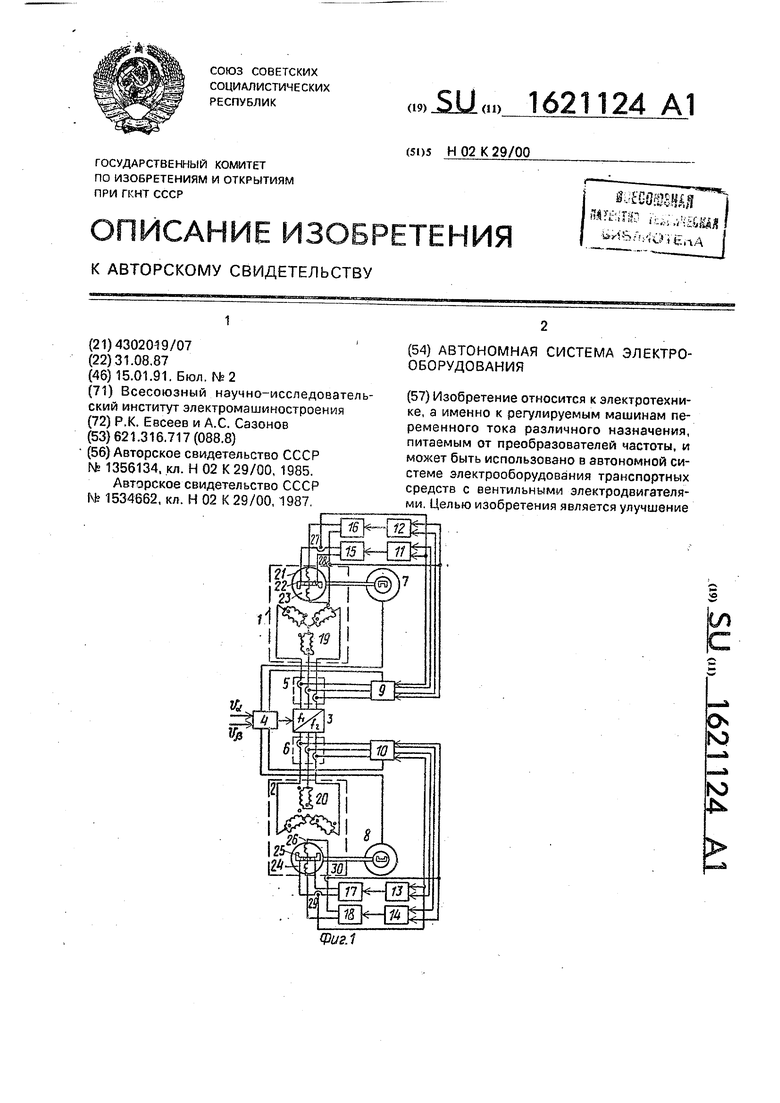
-
JVfe Sin t
Фиг.З
W фиг 5
Составитель А.Жилин Редактор Л.Веселовская Техред М.Моргентал
Корректор О.Кравцова
| Автономная система электрооборудования с вентильным электродвигателем | 1985 |
|
SU1356134A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Автономная система электрооборудования с вентильным электродвигателем | 1987 |
|
SU1534662A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
