Известные установки для автоматического определения технических характеристик автомобильных дорог представляют собой отдельные измерительные и вычислительные устройства, измеряющие углы поворота трассы (й°) и ее уклон (i°) и вычисляющие горизоитальные (х) и вертикальные (у) проекции отдельных участков трассы и радиус (R) ее закруглений по формулам:
L
Sin г cos i° L 180°- L,
--
где: L - длина пути, проходимая
автомашииой с прибором; L,-длина дуги закругления пути.
Описываемая установка отличается от известных приборов того же назначения наличием профилографа с И1нтегрирующими устройствами, нозволяюш,его наряду с измерением отдельных характеристик вычерчивать профиль пути.
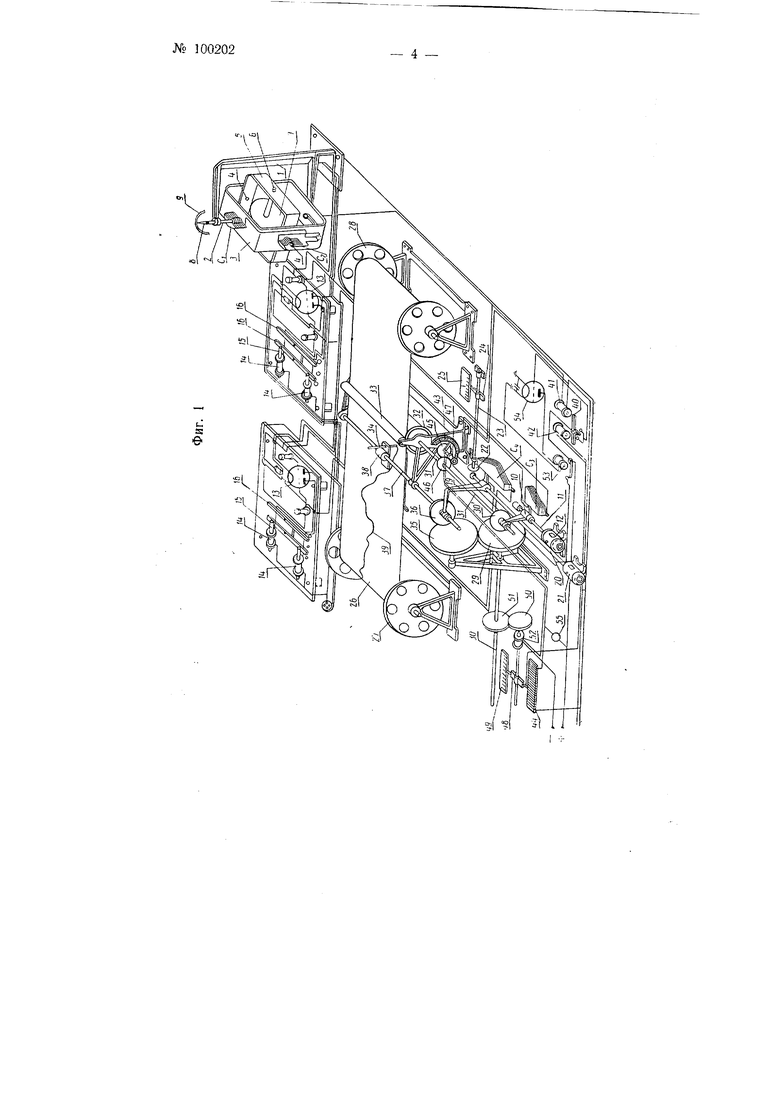
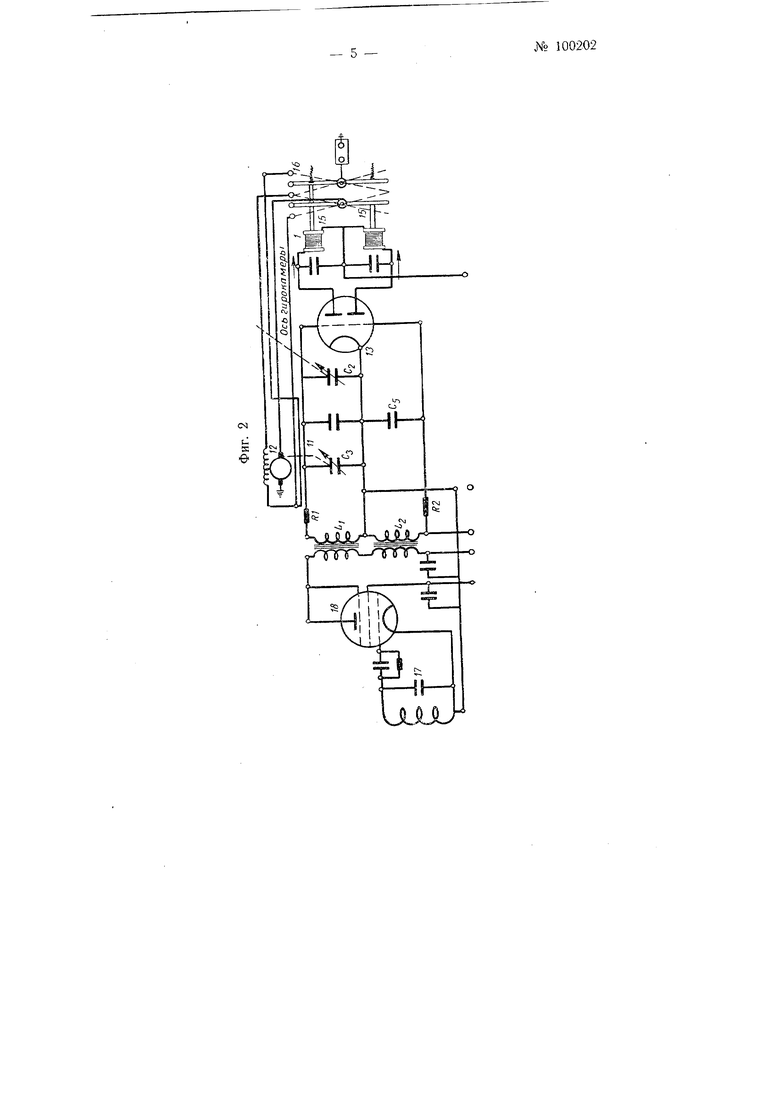
На фиг. 1 изображена схема описываемой установки; на фиг. 2 - электрическая схема механизма для определения горизонтальных проекций X отдельных участков лути, проходимого автомашиной с прибором;
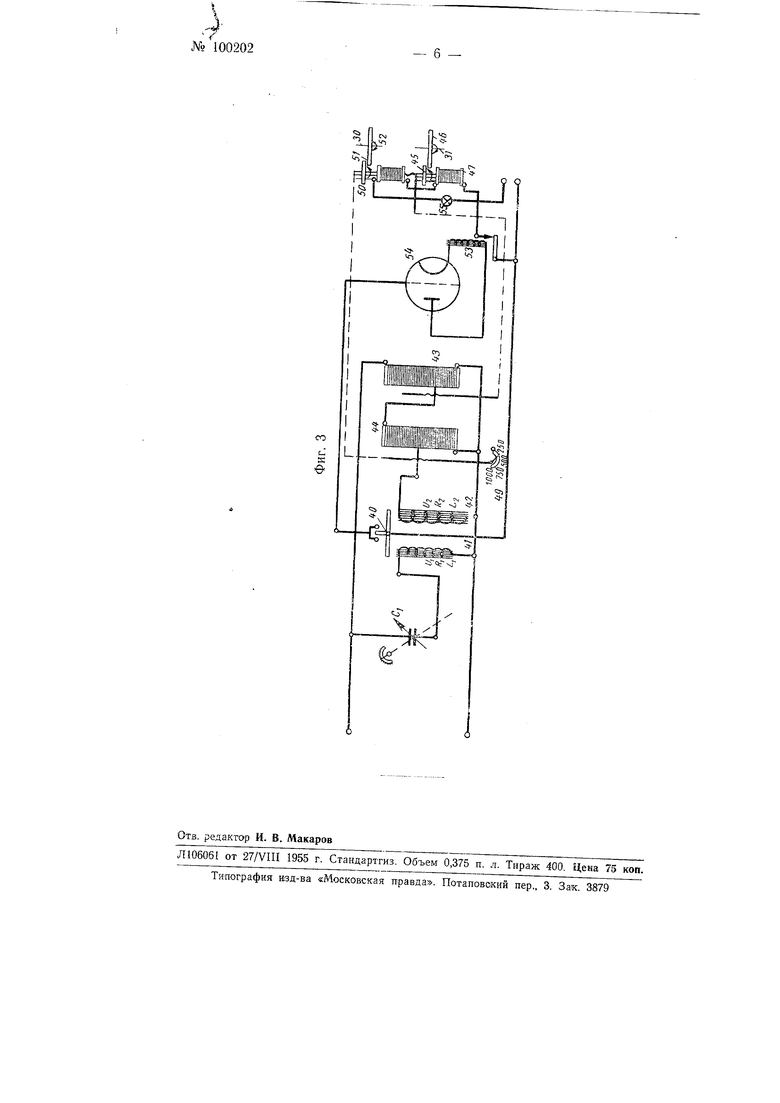
на фиг. 3 - электрическая схема механизма определения радиусов закруглений этого 1пути.
Прибор состоит из гироскопическоIO угломера с двумя электронными емкостными датчиками вертикальных углов Р наклона трассы, и горизонтальных углов «° ее поворота, профилографа для вычерчивания профилограмм пути и механизма вычисления радиусов R закруглений этого пути.
Прибор устанавливается на автомашине, движущейся по испытуемой дороге.
Корпус 1 гироскопического угломера прикрепляется к автомашине. На вертикальных осях 2 в корпусе свободно установлена рамка 5, на горизонтальных осях 4 которой свободно установлена вторая рамка 5. Последняя несет гироскоп 7, вращающийся на опорах 5 от электропривода (яа чертеже не изображен).
В качестве датчика для измерения горизонтальных углов ° поворота трассы на вертикальной оси 2 установлен переменный конденсатор Ci, емкость которого может изменяться пропорционально изменению угла поворота а°. Для отсчета углоз «° к оси 2 -прикреплена стрелка ), перемеи,аюн1аяся по шкале 9.
в качестве датчика для измерения вертикальных углов i° наклона трассы на горизоитальной оси 4 установлен переменный конденсатор €-2, включенный з электрическую схему для определения горизонтальных проекций X и вертикальных проекций // исследуемого яути. Электрические схемы для онределения горизонтальных и вертикальных проекций пути аналогичны.
На фиг. 2 изображена схема для определения горизонтальных проекций X путп по формуле х L.cos Г. Эта схема состоит из задающего измерительного переменного кондансатора €2 включергного в один кз колебательных контуров из индуктивности LI, сопротивления /t; и параллельно Включен1яого колшеисирующего (Пере.менного конденсатора Сз, емкость которого может изменяться пропорционально cos г, для чего его подвиЖНые пластины соединены с ползуном 10. Последний своей резьбой взаимодействует с резьбовым валиком 11, соединенным с реверсивным элахтрод-вигателе.м 12. В эту же схему включен сдвоенный триод 13, поляризованное реле с соленондами 14, соединенными своими сердеч;никами 15 с коромыслом 16 переключателей для реверсирования электродвигателя, и задающий генератор J7 стандартной частоты. Последний состоит из колебательных контуров стандартной частоты, пентода 18 и двух настраиваемых с ним в резонанс колебательных контуров: LI 1 Cs с переменной частотой, зависящей от изменения емкости задаЮщего измерительного конденсатора С,2, и контура LzRzCz, настроенного на стандартную частоту reoiepaтора.
Электрическая схема для определения Вертикальных составляюашх проекций пути по формзле у. LyC X sin Г аналогична схеме для определения горизонтальных проекций л: с тем, однако, отличием, что вместо уравновещивающего конденсатора Сз применен неременный конденсатор С, емкость которого может изме«яться пропорционально sin i°, для чего его подвижные пластины соедине яы с ползуном 19. Последний своей резьбой взаимодействуете резьбовым валиком 20, соединенным с реверсивным электродвигателем 21. Для одновременного определения угла i° вал 20 электродвигателя 21 посредством конических шестерен 22 соединен с резьбовым валиком 23, взаимодействующим с резьбой ползуна 24 со стрелкой, перемещающейся по щкале 25 углов 1° подъема пути.
Полученные угло1вые перемещения электродвигателя 12 и валика //, пропорциональные cos i°, передаются иа фрикционный интегратор привода для продольного перемещения ленты 26 профилографа, пере;матывае.мой с «атущки 27 на катущку 28. Этот иптеггратор выполнен в виде фрикциан1ЮГО диска 29, вращаемого валом 30, соединенным гибким валом с колесами автомашины (на чертеже не показан).
С диском 29 взаимодействует ДКС.К 30, перемещаемый полззном 10 и скользяще установленный на приводной оси 31 с закрепленным -на ней барабаном 32 для перемещения ленты 26, прижимаемой валиком 33, пропорционально горизонтальной проекции X проходимого аютомащиной пути. Угловые перемеи ;ения электродвигателя 21 и валика 20, пропорциональные sin i°, передаются на фрикционный интегратор привода для перемещения пищущего острия 34 пропорционально вертикальной проекции у проходимого пути, обеспечивающего вычерчивание на ленте 26 профилограммы пути. Этот интегратор выполнен в виде фрикционного диска 35, приводимого в движение диском 29, С диском 35 взаимодействует диск 36, перемещаемый ползуном 19 и скользяще установленный на приводном .валике 37. Последний своей резьбой взаимодействует с резьбой ползуна 38 пищущего острия 34, вычерчивающего профилограм.му 39 щтя на ленте 26.
Механизм для вычисления радиусов закруглений проходимого пути, в зависимости от длины дуги закругления этого пути и величины угла поворота пути,, выполнен в виде счет но-рещающей потенциометричеокой схемы, работающей ло формуле; „ 180° L,
- тт; Этот механизм (включает в себя переменный конденсатор Ci гироскопа, изменение емкости которого прагюрционально углу (поворота «° пути, поляризованный переключатель 40 с двумя соленоидами 41 и 42 для включения движком двух переменных сопротивлений 43 и 44. Движок сопротивления 43 приводится в действие винтовым валиком фрикционного диска 45, юцеплевного с приводным диском 46 на оси 31 барабана 32. Для сцепления дисков 45 и 46 применен соленоид 47 включаемый переключателем 40. Движок сопротивления 44, снабженный стрелкой 48, перемещающейся по щкале 49 радиусов R закруглений пути, привоДИТ1СЯ в действие винтовым валиком фрикционного диска 50, сцепляемого с приводным диском 51, сидящем на оси 30 и приводимым в действие гибким валом от колес автомашины (на чертеже не изображен).
Для сцепления этих дисков применен соленоид 52, включаемый переключателем 40. В цепь переключателя 40 включено реле 55 с усилительным триодом 54, а также сигнальная лампочка 55. Схема этого механизма при движении автомащины по прямому пути находится в равновесии и указатель 48 шкалы 49 радиуса R закруглений показывает ее, так как через обмотки соленоидов 41 и 42 переключателя текут равные токи. При повороте автомашины переменный конденсатор С гироскопа нарушит равновесие токов в соленоидах переключателя 40, последний через реле 53 подает питание на соленоиды 47 и 52 включения фрикциональных передач 45, 46 и 50, 51 для перемещения движков изменения величины переменных сопротивле1ний 43 и 44. При этом ведущий диск 46 через фрикционный диск 45 будет изменять
величину переменного сопротивления 43 пропорционально горизонтальной проекции X пути кривой. Ведущий диск 51 через фрикционный диск 50 будет изменять величину переменного сопротивления 44 пропорционально радиусу R . закругления пути. Одновременно включится сигнальная лампочка 55 на все время движения автомащины по закруглению. Списывание величины углов поворота производят со щкалы 9 гироскопа, а величины радиуса R закругления - со щкалы 49. При движении автоманшны одновременно на ленте 26 будет вычерчиваться пищущим острием 34 профилограмма пути 39.
Предмет изобретения
Установка для автоматического определения технических характеристик автомобильных дорог
3/ г L sin i°
x L
180 - L R
(где: L - длина пути;
Ь-2 - длина закругления пути;
R - радиус кривизны пути:
° - угол поворота трассы;
1° - угол наклона трассы; , У - проекция отдапьных участков трассы), содержащая гироскопический датчик углов наклона и поворота трассы и электрическое устройство, вычисляющее радиусы закругления пути, перемещаемая вдоль исследуемой трассы, о т л и ч а ющ а я с я тем, что, с целью вычерчивания профиля пути, установка снабжена профилографом с интегрирующими устройствами, в которые с упомянутых датчиков и устройств .непрерывно подаются вырабатываемые ими данные.

(-. s
ULlb
№100202
со С UJ
