Известные устройства для автоматического построения графика продольного профиля земной поверхности -вдоль оси трассы, содержащие электронный блок и механический профилограф, имеют сложную схему, требуют выполнения большого объема работ и не позволяют получить график профиля трасс в камеральных условиях непосредственно с топографической карты, в связи с чем они находят ограниченное применение при проведении геофизических исследований.
В предлагаемом устройстве электронный блок выполнен в виде электронной следящей системы- соединенной с моделирующим счетнорешающим устройством. Указанное отличие позволило значительно сократить объем работ по проектированию трасс и получить график профиля трасс в камеральных условиях непосредственно с топографической карты.
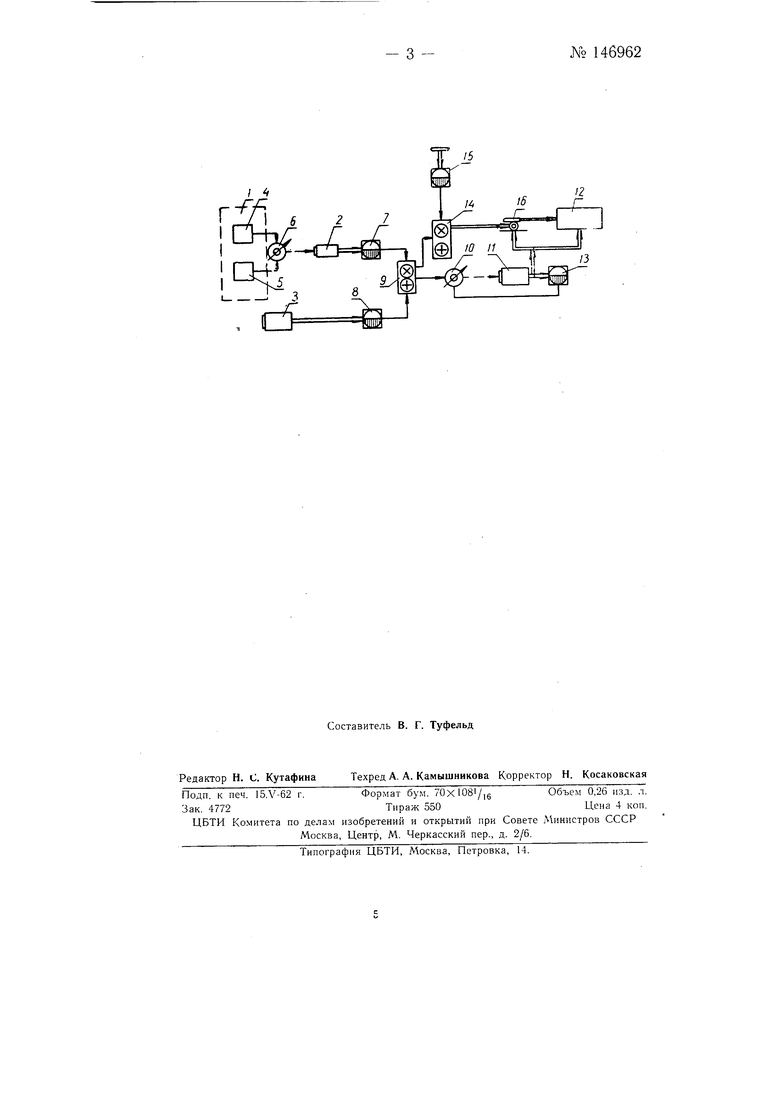
На чертеже приведена принципиальная блок-схема предлагаемого устройства цля автоматического построения графика продольного профиля земной поверхности вдоль оси трассы.
На каретке /, перемещающейся вдоль координатных осей X и У с помощью двигателей 2 и 5 размещены два фотоэлектрических датчика 4 и 5, которые подключены к нуль-индикатору 6. Следящая система работает следующим образом. При перемещении каретки 1 вдоль оси X карты оптическая ось одного из фотоэлектрических датчиков будет пересекаться с нанесенной на карту линией трассы, в результате чего мощность светового потока, падающего на этот датчик, уменьшится, что приведет к уменьшению падения напряжения на его нагрузке. Это вызовет появление сигнала рассогласования на нуль-индикаторе 6 и включение двигателя 2, который будет перемещать каретку / так, чтобы ось трассы на карте удерживалась посередине расстояния между
№ 146962- 2 оптическими осями фотоэлектрических датчиков 4 и 5- При этом двигатели 2 и 3 будут вводить в моделирующее счетно-решающее устройство, а именно, на преобразователи 7 и 8 величины, пропорциональные проекциям вектора заложения на оси прямоугольной системы координат карты.
В преобразователях вырабатываются соответствующие электрические сигналы, которые подаются- на синусно-косинусный вращающийся трансформатор 9, где вырабатывается полная величина вектора заложения по его составляющим в прямоугольной системе координат- С синусно-косинусного вращающего трансформатор 9 напряжение, пропорциональное вектору заложения, идет .по двум каналам. По одному каналу оно проходит через нуль-индикатор 10 на двигатель 11, который преобразует электрический сигнал в механическую величину, поступающую на профилограф 12 и преобразователь 13, расположенный в цепи обратной связи. С преобразователя 13 электрический сигнал, пропорциональный перемещению профилографа на величину вектора заложения, подается на нуль-индикатор 10, по которому можно судить о правильной отработке двигателем // заданных величин.
По другому каналу напряжение, пропорциональное вектору заложения поступает на синусно-косинусный вращающийся трансформатор 14, куда также подается из преобразователя 15 электрический сигнал, пропорциональный высоте сечения горизонталей. С механического выхода синусно-косинусного вращающегося трансформатора 14 снимается величина, пропорциональная продольному углу наклона трассы, которая в виде механического перемещения подается на шариковый фрикционный механизм 16. Фрикционный механизм 16, диск которого вращается пропорционально вектору заложения, предназначен для перемещения лентопротяжного механизма профилографа 12Предлагаемое устройство позволяет получить график профиля трасс Б камеральных условиях непосредственно с топографической карты, благодаря чему оно может найти широкое применение при пpoв дении топографических работ.
Предмет изобретения
Устройство для автоматического построения графика продольного профиля земной поверхности вдоль оси трассы, содержащее электронный блок и механический профилограф, отличающееся тем, что, с целью сокращения объема работ по проектированию трасс и получения графика профиля трасс в камеральных условиях непосредственно с топографической карты, электронный блок в нем выполнен в виде электронной следящей системы, соединенной с моделирующим счетнорешающим устройством.
-v
12 146r
ti3 4сэ
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ПОЛУАВТОМАТИЧЕСКОГО ПОСТРОЕНИЯ | 1965 |
|
SU174377A1 |
| УСТРОЙСТВО для СЧИТЫВАНИЯ ГРАФИЧЕСКОЙ ИНФОРМАЦИИ | 1967 |
|
SU206157A1 |
| Установка для автоматического определения технических характеристик автомобильных дорог | 1952 |
|
SU100202A1 |
| БКБ-ГКО-ГГ-Л | 1966 |
|
SU187323A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ГЕОМАГНИТНОГО ПОЛЯ | 1970 |
|
SU272583A1 |
| Устройство для измерения параметров ветра | 1980 |
|
SU932406A1 |
| Устройство для формирования дозных полей | 1974 |
|
SU576684A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ВЫРАБОТКИ МОДУЛЯ И АРГУМЕНТА ВЕКТОРА | 1972 |
|
SU328423A1 |
| ПРОФИЛОГРАФ | 1972 |
|
SU425045A1 |
| Рулевое устройство транспортного средства со всеми управляемыми колесами | 1978 |
|
SU766942A1 |