Изобретение относится к периферийному оборудованию ЭВМ и предназначено для автоматизации процессов ввода в ЭВМ и вывода из ЭВМ специальной информации, связанной с конструированием пространственных объектов.
Известно устройство, предназначенное для ввода в ЭВМ информации о пространственном положении некоторых точек, принадлежащихповерхностям конструируемых пространственных объектов,, содержащее рукоятку, связанную с тремя датчиками линейных перемещений С- Недостатком известного устройства является низкая производительность, обусловленная тем, что при вводе информации в ЭВМ в случае врзникновения необходимости ввода координат некоторой плоскости оператор вынужден последовательно вводить координаты принадлежащих этой плоскости трех точек. Кроме того, известное устройство не предназначено для вывода информации о пространственной конфигурации объекта.
Целью изобретения является повышение производительности к удобства работы оператора.
Указанная цель достигается тем, что в устройство для ввода в ЭВМ и вывода из ЭВМ информации о пространственной конфигурации объекта, содержащее рукоятку с кнопками управления и три датчика линейных перемещений, выходы которых являются выходами устройства, введена подвижная по трем линейным коорди10натам платформа, механически связанная с-датчиками линейных перемещений по Ксисдрй степени ее подвижности, на платформе установлен.трехстепенной угловой шарнир, механи15чески соединенный с датчиками угловых перемещений по каждой из степеней его подвижности, к которому жестко присоединена пластина для визуализации вводимой и выводимой
20 информации, причем центр пересечения осей трехстепенного углового шарнира совмещен с точкой платформа, три линбйные пространственные координаты которой вводятся.в ЭВМ,
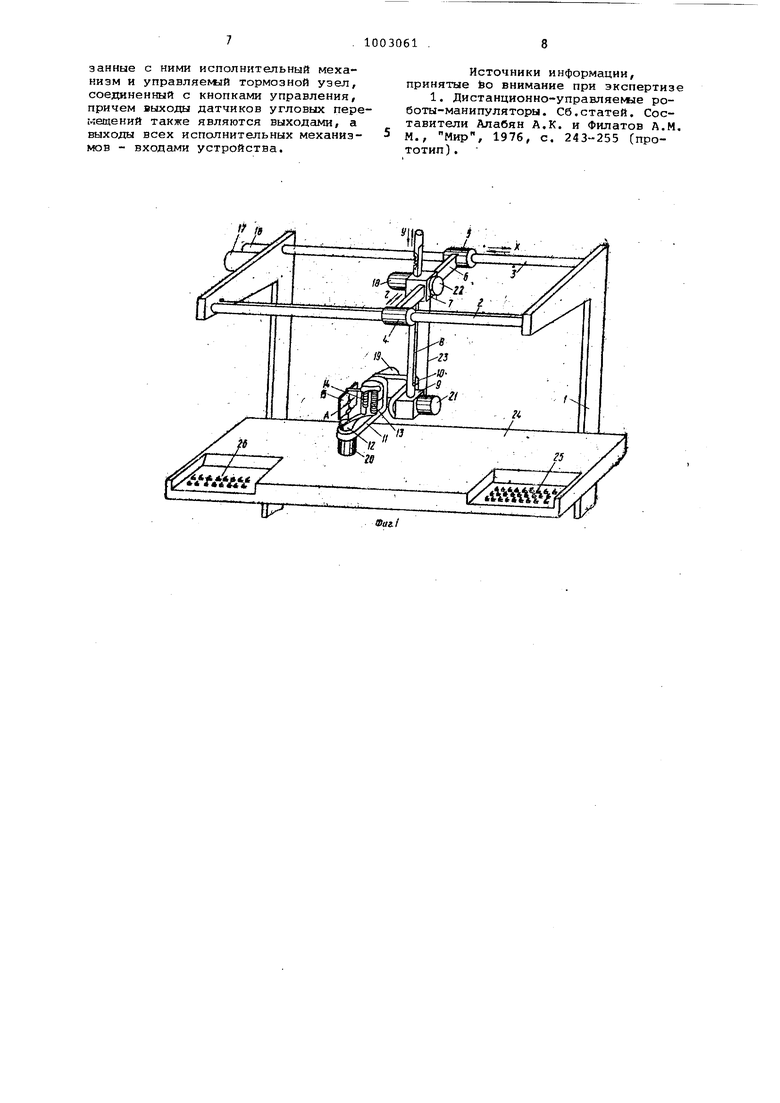
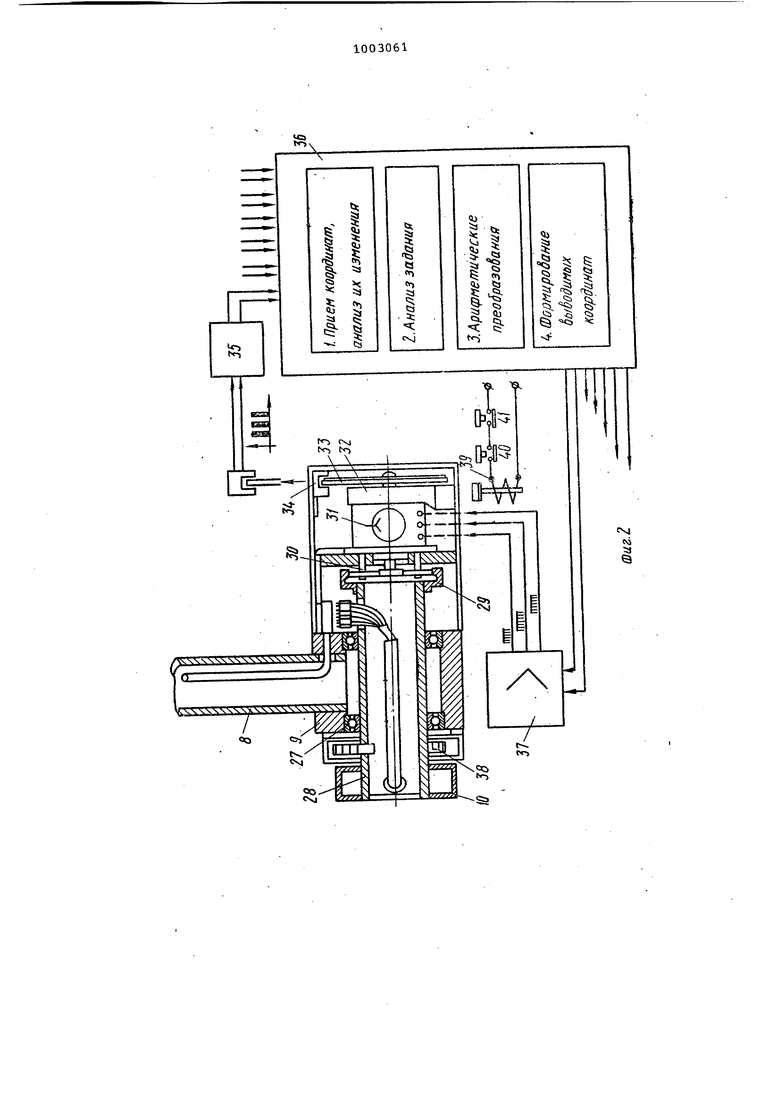
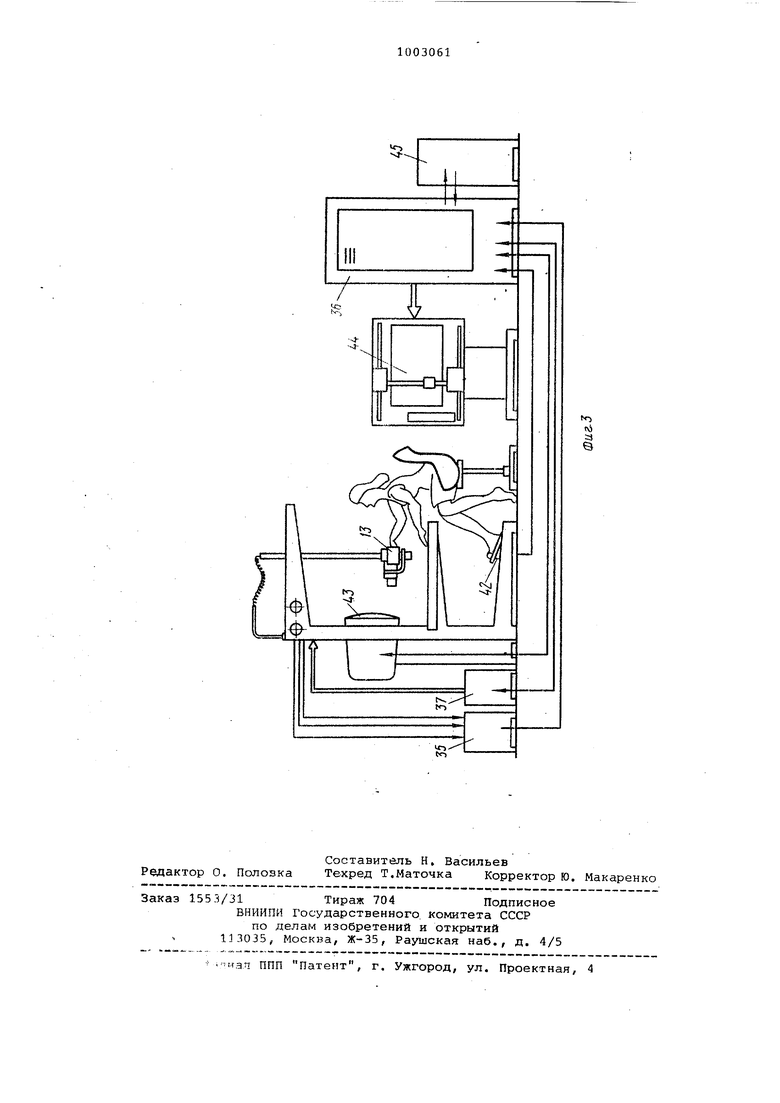
25 и одновременно лежит на плоскости пластины, fc которой соединена рукоятка, по каждой из степеней подвижности платформа и трехстепенного углового шарнира установлены меха30нически связанные с ними исполнительный механизм и упоавляемый тор мозной узел, соединенный с кнопками управления, причем выхощ датчи . ков угловых перемещений также явля ются выходами, а входы всех исполнительных механизмов - входами уст ройства. На фиг. 1 изображено устройство на фиг. 2 - схема соединения этого устройства с ЭВМ; на фиг. 3 - использования устройства для ввода в ЭВМ и вывода из ЭВМ информации о пространственной конфигурации объекта в составе системы автоматизированного конструировани Устройство Ьостоит из несущей рамы 1, на которой установлены направляющие 2 и 3, вдоль которых на опорах 4 и 5 перемещается траверса б (координата X). Вдоль траверсы 6 скользит каретка 7 (координата Z), по которой перемещается вертикальны стержень 8 (координата Y), К нижнему концу стержня 8 присо динена подвижная платформа 9, несу щая трехс ёпенной угловой шарнир, состоящий из шарнирно соединенных Г-образных рычагов 10 и 11 (координаты 4i Hf:j), На рычаге 11 шарнирно закреплена стойка 12 (координата которой жестко Присоединена рукоятда 13 с кнопками 14 управления и пластиной 15 для визуализаций вводи мой и выводимой информации. Соответствующие каждой из степе.ней подвижности устройства, т.е. каждой из вводимых или выводимых координат, датчик перемещений, исполнительный механизм и тормозной узел могут, быть выполнены в виде единого блока. Всего в устройстве имеется шесть таких блоков. Для координат X и Z на раме 1 установлены блоки 16 и 17, механически связанные, например, с помощью тросового привода, с траверсой б и кареткой 7 (тросы и их запасовка не показаны). Для координаты Y на каретке 7 установлен аналогичный блок 18. Измерение, фиксация и изменение угловых кос5рдинат Ч, , Y,. и осуществляются с помощью установленных на рычагах 10 и 12 и на подвижной платформе 9 блоков соотвётст венно 19, 20 и 21. Для уравновешивания веса подвижн платформы 9 с установленным на ней оборудованием на каретке 7 установлено специальное разгрузочное устро ство 22, представляющее собой, например, спиральную пружину с предварительным натягом, удерживающее платформу с помощью тросика 23, Кроме того, к раме 1 присоединена плоскость рабочего стола 24, содержащего пульт 25 для управления ЭВМ и пульт 26 для управления вводом и выводом информации. Пример конкретного выполнения бло ка, содержащего датчик перемещений, исполнительный механизм и тормозной узел, а также схема его подключения к ЭВМ представлены на фиг, 2, причем для примера выбран бл.ок, соответствующий координате 2. В корпусе подвижной платформы 9 на подшипниках 27 установлен полый вал 28, к одному из концов которого жестко присоединен Г-образный рычаг 10, а к другому - шестерня 29, связанная через редуктор 30 с исполнительным механизмом 31, выполненным, например, в виде шагового электродвигатеЛя. На валу исполнительного механизма 31 установлен также электрически управляемый тормозной узел 32 и диск 33 датчика 34 угловых перемещений, подключенного через пре1образователь 35 к одному из входов ЭВМ 36. Соответствующий выход ЭВМ через усилитель 37 соединен с входе исполнительного механизма 31, Для разгрузки руки оператора от восприятия момента от неуравновешенных сил собственного веса элементов устройства между платформой 9 и валом 28 встроена предварительно напряженная спиральная пружина 38. Управля1ацая катушка 39 тормозного узла 32 подключена к источнику питающего напряжения через последовательно соединенные нормгшьнозамкнутые кнопки 40 и 41 управления, первая из которых связана с рукояткой 13 (фиг. 1), а вторая, общая для всех тормозных узлов - с педалью 42 (фиг. 3).Общая схема включения устройства в аппаратурный комплекс, предназначенный для работы оператора на ЭВМ в диалоговом режиме, например, при вьшолнении работ по автоматизированному конструированию, приведена на фиг.З. Здесь оператор находится непосредственно перед устройством , причем его правая рука находится на рукоятке 13, Для наблюдения за картиной сформированного пространственного объекта перед оператором установлен графический дисплей 43, а для получения твердой копии изображения - графопостроитель 44, ЭВМ 36 включает в комплект внешние запоминающие устройства 45. Работа с помощью устройства вводавывода производится следукицим образом. Оператор, отключив с помощью необходимой кнопки (или кнопок) 40, 41 торможение по выбранной координате с помощью рукоятки 13 перемещает пластину 15 в нужное пространственное полохсение. При этом пластина выступает в качестве материального объекта визуализирующего для оператора пространственное положение плоскости., ограничивающей объем конструируемого объекта. Одновременно изменение поло жения плоскости в пространстве оператор может просматривать по ее еледам на координатных осях на экране графического дисплея 4-3. Выбрив необходимое положение пла тины 15, оператор освобождает кнопку управления тормозным узлом, соответствующий исполнительный механизм сто порится и показания датчиков перемещения считываются в память ЭВМ 36. Весь процесс конструирования объе та (детали, узла) выполняется последовательным перемещением оператором пластины 15 в нужное положение и за данием соответствующим программным средствам ЭВМ 36 необходимых указаний по фиксированию заданных плоскостью координат и определению линий, образующихся при пересечении введенных плоскостей, а также объединению (или разделению) ограниченных введенными плоскостями объемов. При необходимости ввода цилиндрических поверхностей оператор ука-г зывает программным средствам какую из осей (X,Y или Z) необходимо принять в качестве оси цилиндра и дополнительно задает его радиус. Процесс вывода информации на устройство выполняется следующим образом. Оператор дает прогргиммным сред ствам указание о том, какую из сфор мированных в процессе конструирования плоскостей, ограничивающих пространственный объект, он желает вывести на устройство, после чего, освободив с помощью выбранной кнопки или пепалк 42 соответствующие тормозные узлы, перемещает пластину 15 приблизительно в направлении сбли жения с выводимой плоскостью. Программные средства обеспечивают в этот период „вычисление длины перпендикуляра, опущенного из точки А пластины координаты точки А фиксируются датчиками, входящими в блоки 16 - 21) на выводимую плоскость, координаты которой хранятся в памяти ЭВМ. Программные средства обеспечивают разложение текущей длины перпендикуляра на составляющие вдоль всех осей координат и при приближеНИИ фактической длины каждой из составляющих перпендикуляра к некоторому заданному допуску включают реализованную программными средствами систему обратной связи, которая чере преобразователь 35 подает управляющие сигналы на исполнительные механи мы в блоках 16-21. Последние обеспечивают перемещение пластины 15 в заданное положение до тех пор, пока зафиксированное датчиками фактическо положение пластины и вычисленное не сравнятся. Описанный процесс происходит одно временно по всем координатам X, Y, 2 и в конечном счете пластина 15 займет положение, определяемое координатами выводимой из ЭВМ плоскости, т.е. обеспечит пространственную визуализацию - вывод этой плоскости . Поскольку в предлагаемом устройстве оператору представляется возмож- ность нечислового диалога с ЭВМ, при котором/ перемеща1я пластину в нужное положение, оператор имеет возможность вводить одновременно шесть координат, время, необходимое для ввода информации, сокращается в 3-5 раз по сравнению с известными СПОСОбс1МИ. Аналогичное сокращение времени происходит при выводе координат. Смеете с тем возможность нечислового вывода путем автоматической установки пластины в положение, соответствующее выводным координатс1м, исключает ошибки, возможные в процессе конструирования пространственных объектов, в тех случаях, когда необходимо осуществить припасовывание поверхностей конструиpyeNMX объектов. Сокращение затрат времени на процесс обмена и уменьшение возможных смиибок обеспечивает повышение производительности труда и удобства работы сепаратора. Формула изобретения Устройство для- ввода в ЭВМ и вывода из ЭВМ информсщии о пространственной конфигурации объекта, преимущественно для систем автоматизированного конструирования, содер- . жащее рукоятку с кнопками управле- . ния и той датчика линейных перемещений, выходы которых являются выходами устройства, отличающееся тем, что, с целью повышения производительности и удобства работы оператора, в устройство введена подвижная по трем линейным координатам платформа, механически связанная с датчиками линейных перемещений по каждой степени ее подвижности, на платформе установлен -грехстепенной угловой шарнир, механически соединенный, с датчиками угловых перемещений, по каждой из степеней его подвижности, к которому жестко присоединена пластина для визуализации вводимой и кдводимо информации, причем центр пересечения осей трехстепенного углового шарнира совмещен с точкой платформы, три линейные.пространственные координаты которой вводятся в ЭВМ, и одновременно лежит на плоскости пластины, с котброй соединена рукоятка, по каждой из степеней подвижности платформы и трехстепенного углового шарнира установлены механически свячанные с ними исполнительный механизм и yпpaвляe ый тормозной узел, со1даненн й с кнопками правления, причем выхода датчиков угловых пере м пений также являются ь-ходаш,, а выходы всех исполнительных механизмов - входами устройства.
Источники информации, принятые fee внимание при экспертизе
1. диcтaнциoннo-yпpaвля6 ыe роботы-манипуляторы. Сб.статей. Составители Алабян А.К. и Филатов A.M. М., Мир, 1976, с. 243-255 (прототип) .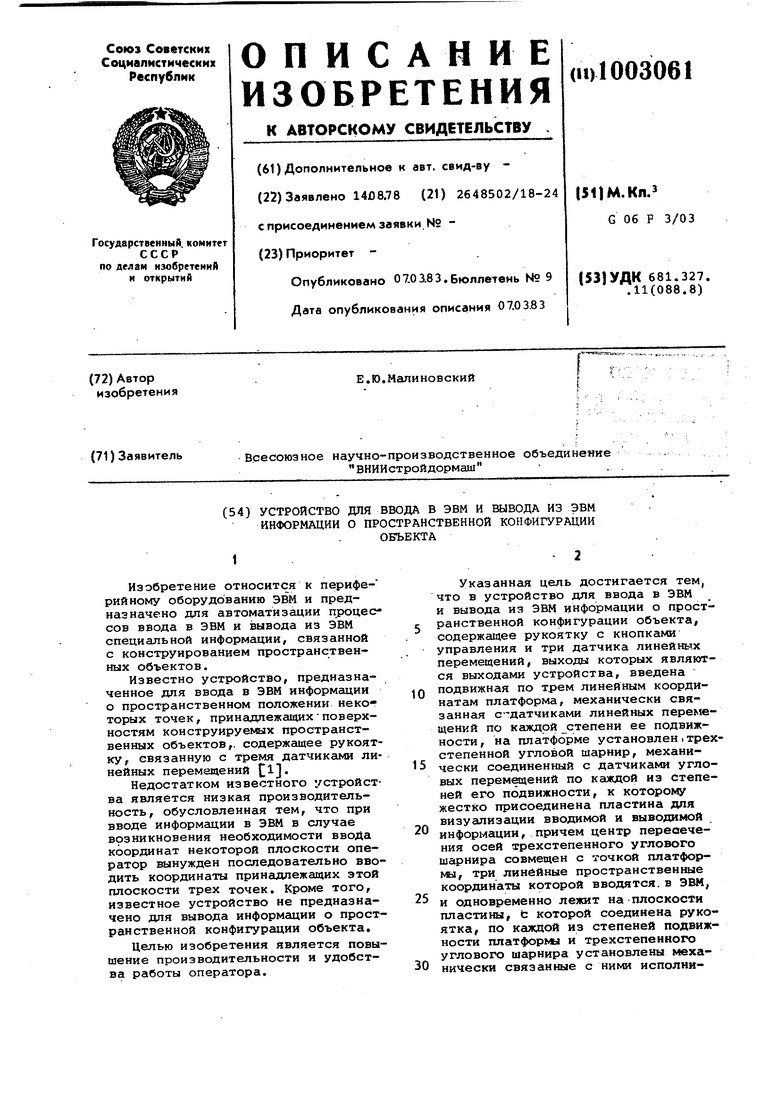
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВВОДА ИНФОРМАЦИИ В ЭВМ | 1999 |
|
RU2168201C1 |
| УСТРОЙСТВО ДЛЯ ВВОДА ИНФОРМАЦИИ В ЭВМ | 2000 |
|
RU2166203C1 |
| Устройство ввода команд для системы управления экскаватором | 2023 |
|
RU2809499C1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| БАРОКАМЕРА ДЛЯ МЕДИЦИНСКИХ ИССЛЕДОВАНИЙ | 1991 |
|
RU2061450C1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| СПОСОБ ВВОДА ИНФОРМАЦИИ В ЭЛЕКТРОННО-ВЫЧИСЛИТЕЛЬНУЮ МАШИНУ (ЭВМ) | 2000 |
|
RU2173882C1 |
| Способ управления исполнительным механизмом робота-манипулятора с силомоментной обратной связью и устройство для его осуществления | 2018 |
|
RU2699703C1 |
| Задающий орган манипулятора | 1986 |
|
SU1393619A1 |
| УСТРОЙСТВО ДЛЯ ВВОДА И ВЫВОДА ДАННЫХ ЭВМ | 2007 |
|
RU2398262C2 |
tSf
Фаг.
IT)
ivi
Si
Q
