Изобретение относится к задающим устройствам систем управления манипуляторами и может быть использовано для управления манипуляторами в полуавтоматическом, командном либо в комбинированном, например командно-копирующем, режимах.
Целью изобретения является повышение удобства эксплуатации за счет ис- пользования возможности управления пальцами руки оператора.
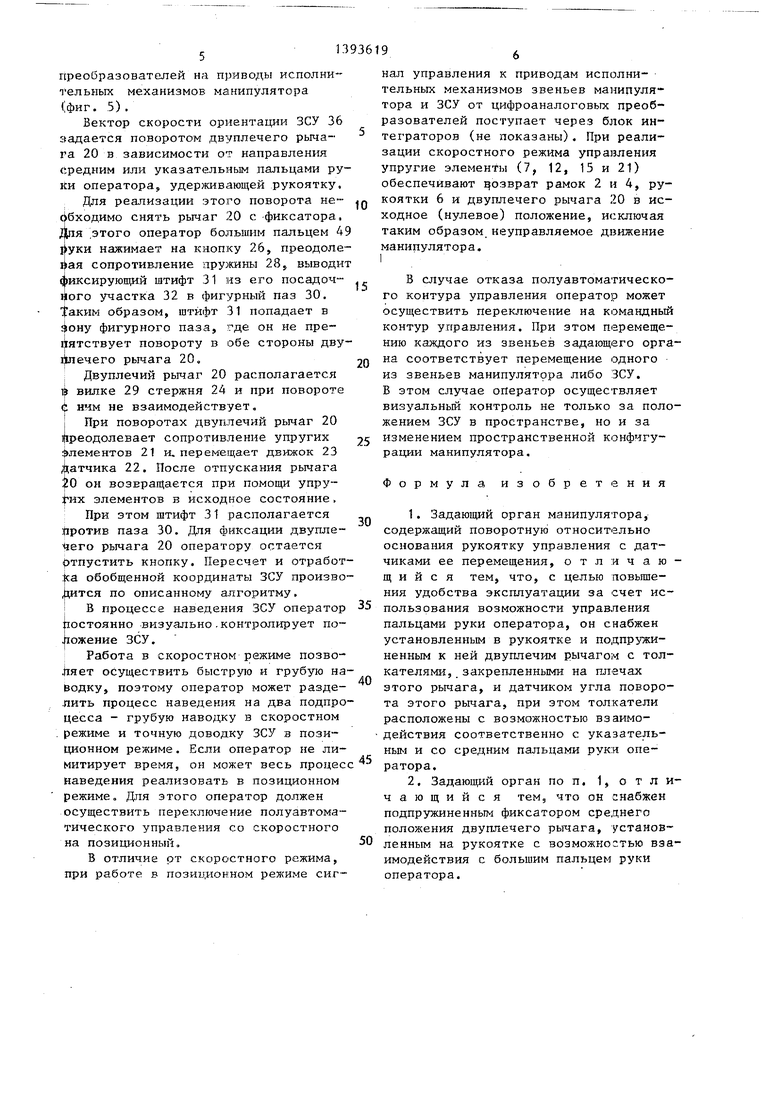
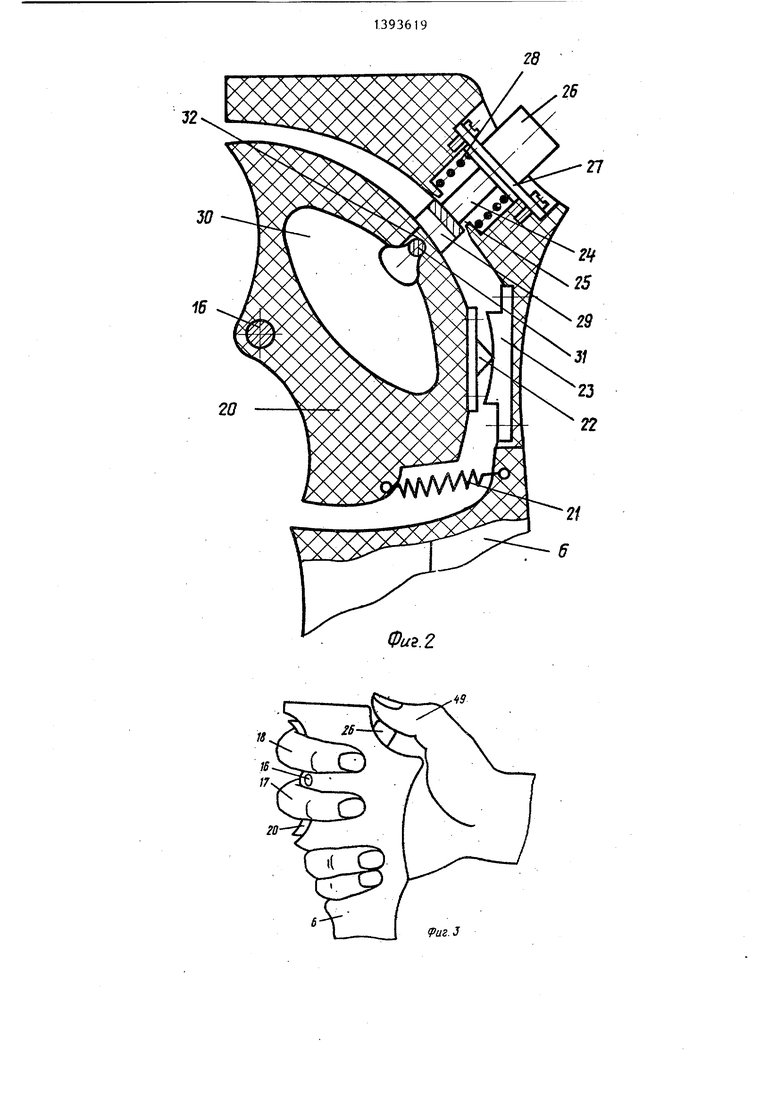
На фиг. 1 -показана кинематическая схема задающего органа; на фиг, 2 - бырез на рукоятке задающего органа в зоне расположения на ней двуплечего рычага и фиксатора; на фиг. 3 - рукоятка задающего органа в зоне расположения на ней двуплечего рычага и фиксатора с рукой оператора, общий вид; на фиг. 4 - схематично лесозаготовительная машина, управляемая задающим органом; на фиг, 5 - кинематическая схема манипулятора мавганы в системе координат.
Задающий орган включает в себя установленную с возможностью продольного перемещения относительно неподвижного основания 1 внешнюю рамку 2 в которой с возможностью вращения вокруг оси в подшипниках 3 шарнирно закреплена внутренняя рамка 4.
Ось вращения внутренней рамки 4 относительно внешней рамки 2 параллельна направлению продольного пере- мещения рамки 2 в направляющих основания 1. ,
Во внутренней рамке 4 с возможностью поворота в подишпниках 5 в плоскости, перпендикулярной плоскост поворота рамки 4 относительно рамки 2 установлена рукоятка Ь между рамкой 2 и о снованием 1 установлены упругие элементы 7, шарнирно спиральные пружины, оси которых параллельны направлению продольного перемещения рамки 2,
На основании установлен датчик (потенциометр) 8, движок 9 которого закреплен на рамке 2. Упругие элементы 7 подобраны и установлены так,что в исходном положении сигнал, снимаемый с потенциометра,, равен нулю.
На рамке 2 смонтирован датчик 10 (потенциометр), движок 11 которого установлен на внутренней рамке 4,
Между рамками 4 и 2 установлены упругие элементы 12,, которые подобраны и закреплены так, что в исходном
0 5
0
с
д г
0
5
положении рамки 4 движок 11 потенциометра находится в положения, соответствующем нулевому уровню сигнала, снимаемого с датчика 10.
На рамке 4 смонтирован датчик 13 (потенциометр), движок 14 которого закреплен на рукоятке 6.
Между рукояткой 6 и рамкой 4 установлены упругие элементы 1.5 (например, спиральные пружины). Они выбраны и установлены так, что в исходном (нулевом) положении рукоятки 6 движок 14 соответствует нулевому сигналу.
Кроме того, задающий орган снабжен установленным на оси 16, смонтированной в рукоятке 6 между средним 17 и указательным 18 пальцами, с возможностью поворота в подшипниках 19 двуплечим рычагом 20 с толкателями на его плечах, который посредством упругих элементов 21 связан с рукояткой 6, На рукоятке имеется датчик 22 (потенциометр), движок 23 которого закреплен на двуплечем рычаге 20„
Упругие элементы 21 (например, спиральные пружины) подобраны и установлены так, что положение движка 23 на датчике 22 соответствует нулевому сигналу.
Двуплечий рычаг 20 может быть смонтирован заподлицо с наружной поверхностью рукоятки (фиг. 2)о
Для фиксации двуплечего рычага в исходном нулевом положении задающий орган может быть снабжен подпружиненным фиксатором. Фиксатор может быть выполнен в виде стержня 24, который установлен в соответствующем его сечению отверстии 25 рукоятки. На одном конце этого стержня закреплена, например, посредством резьбового соединения кнопка 26. Перемещению кнопки по стержню вверх препятствует закрепленная на рукоятке шайба 27, кроме того, между кнопкой 26 и рукояткой 6 установлен упругий элемент 28. Второй конец стбфжня 24 выполнен в виде вилки 29 (фиг о 2).
На двуплечем рычаге 20 выполнен фигурный паз 30, который пронизан штифтом 315 закрепленным на. стержне 24 и пересекающим вилку 29. На фигурном пазу 30 предусмотрен посадочньм участок 32 под штифт 31.
Место расположения кнопки 26 на рукоятке 6 выбрано из условия обеспечения управления его большим пальцем руки оператора, удерживающего рукоятку.
Работа задающего органа поясняется на примере управления манипулятором с закрепленным на нем рабочим органом лесозаготовительной машины (фиг. А), содержащей самоходное шасси 33, на котором с возможностью поворота в горизонтальной, плоскости установлена платформа 34 с технологическим оборудованием 35.
В состав оборудования входит и манипулятор с захватно-срезающим устройством (ЗСУ),36. Стрела 37 манипулятора установлена на платформе 34 с помощью шарнира 38 и с возможностью поворота в вертикальной плоскости посредством привода 39. На стреле 37 с возможностью поворота в шарнире 40 посредством привода 41 установлено звено 42.
ЗСУ 36 с возможностью поворота приводом 43 в той же вертикальной плоскости в шарнире 44 установлено на зве не 42.
На оси каждого из шарниров манипулятора смонтированы датчики 45 - 47 обратной связи по положению (потенциометры) . На оси поворотной платформы установлен датчик 48. Корпуса и токосъемники датчиков закреплены соответственно на взаимоподвижных частях каждого из шарниров.
Ось подшипника 19 может быть перпендикулярна плоскости ориентации схвата манипулятора, в данном случае плоскости поворота ЗСУ, либо одной из плоскостей перемещения манипулятора, или одной из плоскостей поворота рукоятки управления. Указанные возможные взаиморасположения вспомогательной оси, рукоятки, плоскостей ,перемещения манипулятора и ЗСУ позволяют получить дополнительные удобства при использовании задающего органа в командном и командно-копирующем режимах.
Задающий орган работает следующим образом.
Основание 1, на котором смонтирован задающий орган, установлено в кабине оператора, например, в зоне подлокотников рабочего места оператора.
При осуществлении полуавтоматического режима управления перемещение рамки 2 в направляющих основания 1 формирует соста вляющую по оси ОХ вектора перемещения характеристической
0
5
0
25
0
5
0
5
0
5
точки схвата, в данном случае шарнира 44 ЗСУ (фиг. 5). Вращение рамки 4 относительно рамки 2 фop шpyeт составляющую вектора перемещения ЗСУ 36 по оси OY.
Поворотом рукоятки 6 относительно рамки 4 формируется составляющая вектора перемещения ЗСУ 36 по оси OZ.
Ориентацию схвата вокруг оси шарнира 44 реализуют поворотом двуплечего рычага 20 в подшипниках 19.
В системе управления манипулятором предусмотрено переключение режимов управления с позиционного на скоростной и обратно и с любого из полуавтоматических на командный.
При реализации перемещения ЗСУ 36 в командном режиме движением рамки 2 в направляющих управляют движением стрелы 37 вокруг шарнира 38,
Поворотом рамки 4 относительно внешней рамки 2 управляют движением поворотной.платформы 34 относительно шасси 33.
Поворотом рукоятки 6 относительно рамки 4 управляют движением звена 42 вокруг шарнира 40. Поворотом двуплечего рычага 20 в подшипниках реализуют движение ЗСУ 36 вокруг шарнира 44.
Задающий орган в системе управления манипулятором описанной машины работает следующим образом.
При включении питания информация о пс/ложении манипулятора с датчиков 45 - 48 обратной связи поступает S спецвычислитель канала полуавтоматического управления. Для наведения ЗСУ на дерево, например, в скоростном режиме полуавтоматического управления оператор включает канал полуавтоматического управления и движением рукоятки 6 формирует вектор скорости перемещения характеристической точки схвата. Составляющая этого вектора в виде электрических сигналов от датчиков 8, 10 и 13 поступает в спецвычис- литепь через блок аналого-цифровых преобразователей (не показаны).
В спецвычислителе заданные координаты характеристической точки схвата из декартовой неподвижной системы координат пересчитываются в обобщенные координаты звеньев манипулятора.
Полученные обобщенные координаты сравниваются с обобщенными координа- тамз датчиков 45 - 48 обратной связи и полученньш сигнал рассогласования поступает через блок цифроаналоговых
Преобразовате лей на приводы исполнительных механизмов манипулятора (фиг. 5).
Вектор скорости ориентации ЗСУ 36 ; адается поворотом двуплечего рычага 20 Б зависимости от направления средним или указательным пальцами ру- Ки оператора, удерлсивающей рукоятку.
Для реализации этого поворота не- ббходимо снять рычаг 20 с фиксатора, tпя .этого оператор большим пальцем 4 руки нажимает на кнопку 26, преодоле- ная сопротивление пружины 28, выводит фиксирующий штифт 31 из его посадочного участка 32 в фигурный паз 30. аким образом, штифт 31 попадает в ioHy фигурного паза, где он не пре- йятствует повороту в обе стороны дву- 1(шечего рычага 20.
Двуплечий рычаг 20 располагается 1 вилке 29 стержня 24 и при повороте ф ним не взаимодействует,
При поворотах двуплечий рычаг 20 преодолевает сопротивление упругих : лементов 21 и. перемещает движок 23 датчика 22. После отпускания рычага он возвращается при помощи упру- :| их элементов в исходное состояние.
При этом штифт 31 располагается Против паза 30. Для фиксации двупле чего рычага 20 оператору остается Отпустить кнопку. Пересчет и отработ :|са обобщенной координаты ЗСУ произво щтся по описанному алгоритму.
В процессе наведения ЗСУ оператор лостоянно визуально.контролирует положение ЗСУ.
Работа в скоростном режиме позволяет осуществить быструю и грубую на |водку, поэтому оператор может разделить процесс наведения, на два подпроцесса - грубую наводку в скоростном режиме и точную доводку ЗСУ в позиционном режиме. Если оператор не лимитирует время, он может весь процес наведения реализовать в позиционном режиме. Для этого оператор должен осуществить переключение полуавтоматического управления со скоростного на позиционный,
В отличие от скоростного режима, при работе в позиционном режиме сиг
нал управления к приводам исполнительных механизмов звеньев манипулятора и ЗСУ от цифроаналоговых преобразователей поступает через блок ин теграторов (не показаны). При реализации скоростного режима упра1зления упругие элементы (7, 12, 15 и 21) обеспечивают озврат рамок 2 и 4, рукоятки 6 и двуплечего рычага 20 в исходное (нулевое) положение, исключая таким образом неуправляемое движение
маницулятора.
1
В случае отказа полуавтоматического контура управления оператор может осуществить переключение на командный контур управления. При этом перемещению каждого из звеньев задающего органа соответствует перемещение одного из звеньев манипулятора либо ЗСУ. Б этом случае оператор осуществляет визуальньй контроль не только за положением ЗСУ в пространстве, но и за изменением пространственной конфигурации манипулятора.
Формула изобретения
1.Задающий орган манипулятора, содержащий поворотную относительно основания рукоятку управления с датчиками ее перемещения, отличающийся тем, что, с целью повьппе- ния удобства эксплуатации за счет использования возможности управления пальцами руки оператора, он снабжен установленным в рукоятке и подпружиненным к ней двуплечим рычагом с толкателями, закрепленными на плечах этого рычага, и датчиком угла поворота этого рычага, при этом толкатели расположены с возможностью взаимодействия соответственно с указательным и со средним пальцами руки оператора.
2.Задающий орган по п. 1, отличающийся тем, что он снабжен подпр5пкиненным фиксатором среднего положения двуплечего рычага, установленным на рукоятке с возможностью взаимодействия с большим пальцем руки оператора.
16
20
26
2i
Фиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления манипулятором | 1987 |
|
SU1445948A1 |
| МАНИПУЛЯТОР | 1970 |
|
SU271252A1 |
| Задающее устройство для управления роботом-манипулятором | 1988 |
|
SU1565680A1 |
| МАНИПУЛЯТОР | 1971 |
|
SU313653A1 |
| СУСТАВ ЗАДАЮЩЕГО ОРГАНА ДИСТАНЦИОННОГО КОПИРУЮЩЕГО МАНИПУЛЯТОРА | 1970 |
|
SU278371A1 |
| КОНТРОЛЛЕР КИСТИ ДЛЯ ИСПОЛЬЗОВАНИЯ В КОНТРОЛЛЕРЕ ОПЕРАТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2716353C1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| СПОСОБ НАВЕДЕНИЯ РАБОЧЕГО ОРГАНА МАНИПУЛЯТОРА ЛЕСНОЙ МАШИНЫ НА ОБЪЕКТ | 2010 |
|
RU2468573C2 |
| МАНИПУЛЯТОР С ОСЯЗАТЕЛЬНЫМ ОЧУВСТВЛЕНИЕМ | 1969 |
|
SU234763A1 |
Изобретение относится к задающим устройствам систем управления манипуляторами и может быть использовано для управления манипуляторами в полуавтоматическом, командном либо в комбинированном, например командного .М в копирующем, режимах. Целью изобретения является повышение удобства эксплуатации за счет использования воз-- можности управления пальцами руки оператора. При осуществлении полуавтоматического режима управления перемещение рамки 2 в направляющих основания 1 формирует составляющую силу по оси вектора перемещения схвата. Вращение рамки 4 относительно рамки 2 формирует составляюно ю силу по оси вектора перемещения схвата. Поворот рукоятки 6 относительно рамки 4 формирует составляющую силу по оси вектора перемещения. Поворот схвата реализуется поворотом двуплечего рычага 20 в подшипниках 19 с помощью указательного и среднего пальцев руки оператора, расположенных на рукоятке 6, с помощью которой осуществляются указанные перемещения. 1 з.п. ф-лы, 5 ил. 21 % (Л 20 со со 00 О) со
го
9
Риг.З
с.
т г
/ 7 JJ 8Фаг.
(раг. 5
J
36
ч
| Аболь П.И | |||
| и др | |||
| Способ изготовления электрических сопротивлений посредством осаждения слоя проводника на поверхности изолятора | 1921 |
|
SU19A1 |
| - М.: Лесная промьшшенность, 1977, с | |||
| Способ использования делительного аппарата ровничных (чесальных) машин, предназначенных для мериносовой шерсти, с целью переработки на них грубых шерстей | 1921 |
|
SU18A1 |
