(5) АДАПТИВНЫЙ КОМПЛЕКС ДЛЯ ОБУЧЕНИЯ ОПЕРАТОРОВ СИСТЕМ УПРАВЛЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер операторов систем управления | 1982 |
|
SU1053132A1 |
| Адаптивный тренажер оператора | 1982 |
|
SU1029215A2 |
| Адаптивный тренажер оператора | 1982 |
|
SU1086451A2 |
| Адаптивное устройство обучения операторов | 1983 |
|
SU1138822A1 |
| Устройство обучения операторов систем управления | 1983 |
|
SU1211792A1 |
| Тренажер оператора | 1984 |
|
SU1174960A2 |
| Устройство обучения операторов систем управления | 1983 |
|
SU1121695A1 |
| Тренажер оператора | 1981 |
|
SU959136A1 |
| Устройство для обучения | 1984 |
|
SU1262558A1 |
| Тренажер оператора | 1983 |
|
SU1098024A1 |
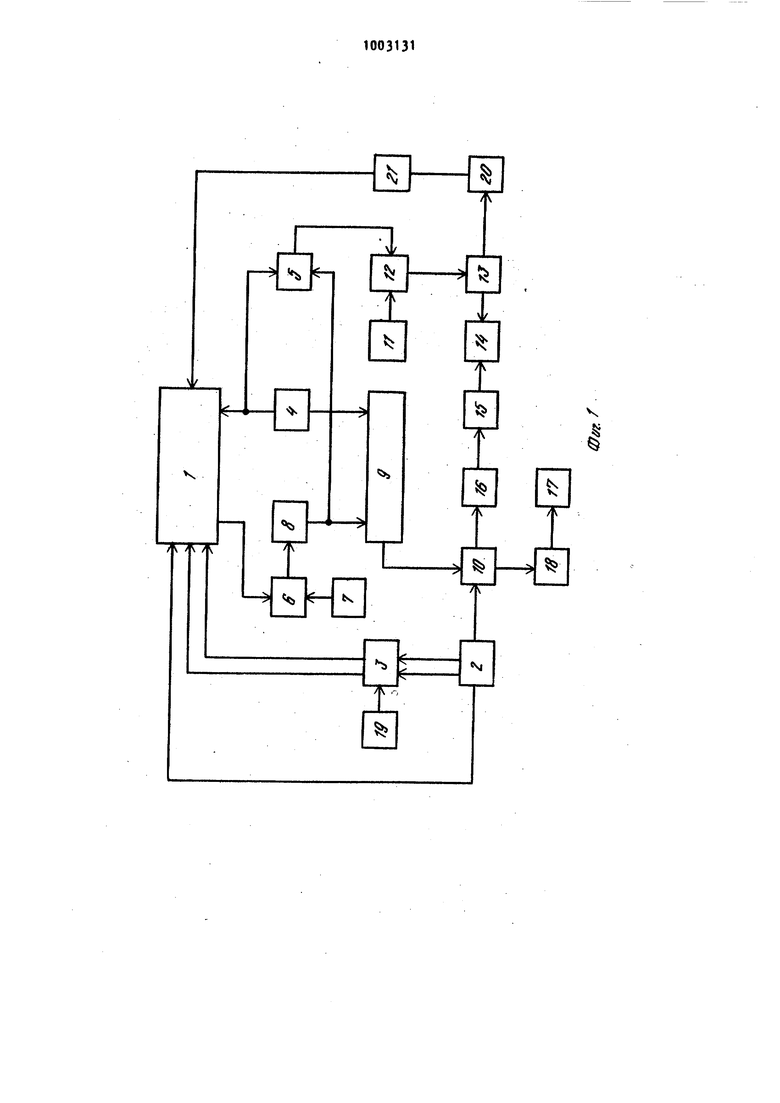
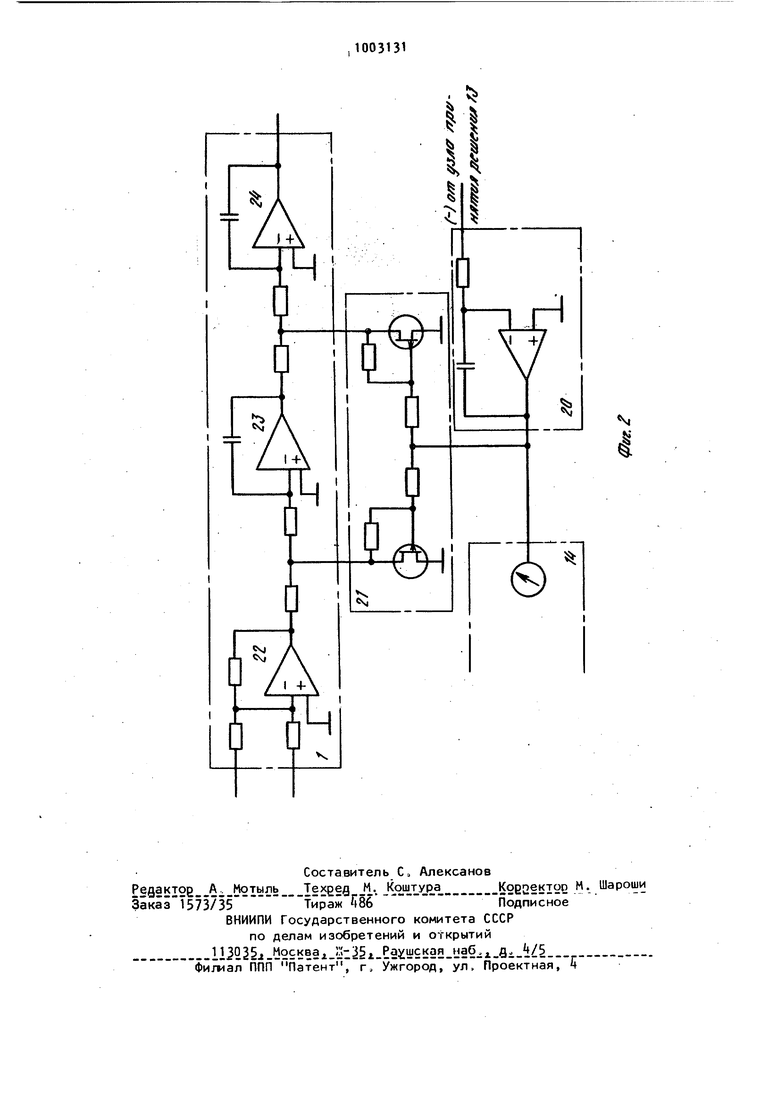
Изобретение относится к устройствам для обучения операторов систем управления . . Известен адаптивный комплекс для обучения операторов систем управления содержащий блок моделирования объекта тренажа, соединенный непосредственно и через узел имитации внешних воздействий с программным блоком, подключен ным через первый блок сравнения к формирователю сигналов, блоку регистр ции отклонений в процессе тренажа и блоку отображения информации и принятия решения, соединенному через второ блок сравнения с блоком эталонных импульсных переходных функций и вычислительным блоком, подключенным к блоку моделирования объекта тренажа и блоку ручного управления, соединенному с формирователем сигнала, и индикатор, связанный с вычислительным блоком и формирователем сигналов СП. Недостатком известного адаптивного комплекса является невысокая эффективность тренажа о Цель изобретения - повышение эффективности тренажа, Поставленная цель достигается тем, что адаптивный комплекс для обучения операторов систем управления, содержащий блок моделирования объекта тренажа, соединенный непосредственно и через узел имитации внешних воздейстВИЙ с программным блоком, подключенным через первый блок сравнения к формирователю сигналов, блоку регистрации отклонений в процессе тренажа и блрку отображения информации и принятия решения, соединенному через второй блок сравнения с блоком эталонных импульсных переходных функций и вычислительным блоком, подключенным к блоку моделирования объекта тренажа и блоку ручного управления, соединенному с формирователем сигналов, и индикатор, связанный с вычислительным блоком и формирователем сигналов имеет имитатор фоновых помех, сумматор, адаптивный блок и блок управления параметрами объекта еиама, выход которого подключен к управляющему входу блока моделирования объекта тренажа, связанного информационным выходом с первым входом сумматора, второй вход которого подключен к выходу имитатора фоновых помех, а выход к входу индикатора, при этом управляющий выход блока отображения информации и принятия решения через адаптивный блок подключен к входу блока управления параметрами объекта тренажа. На фиГо 1 представлена функционал ная схема адаптивного комплекса для обучения; на фиг о 2 - схема блока моделирования объекта тренажа Адаптивный комплекс для обучения (фиГо 1) содержит блок 1 моделирования объекта тренажа,, первый вход которого подключен к первому выходу программного блока 2, второй и тре ;тР1Й входы соединены через имитатор 3 сигналов воздействия с вторым и третьим выходами программного блока 2, а четвертый вход подключен к одному из выходов блока k ручного управлени и первому входу вычислительного блока 5-. При этом выход блока 1 моделирования объекта тренажа подключен к первому входу сумматора 6, к второму входу которого подсоединен выход ими татора 7 фоновых помех, а выход сумматора 6 электрически связан с входом индикатора 8„ Формирователь 9 сигналов подключе своими входами к выходу индикатора 8 второму входу вычислительного блока и второму выходу блока k ручного управления, а выход формирователя 9 сигналов электрически связан с первы входом блока 10 сравнения, другой вх которого соединен с четвертым выходом программного блока 2 Адаптивный комплекс также имеет блок 11 эталонных импульсных переходных функций, второй блок 12 сравнения, один вход которого соединен с выходом вычислительного блока 5, другой вход-- с вы дом блока эталонных 11 импульсных переходных функций, а выход второго блока 12 сравнения через узел 13 при нятия решения соединен с одним из входов узла И отображения, другой ВХОД последнего через узел 15 памяти и дешифратор 1б подключен к первому выходу блока 10 сравнения о Узел 17 регистрации через узел 18 сопряжения соединен с вторым выходом блока 10 сравнения о Кроме того, генератор 19 шума подключен к первому входу имитатора 3 сигналов воздействия, а второй выход узла 13 принятия решения через адаптивный блок 20 и блок 21 управления параметрами объекта тренажа подсоединен к пятому входу блока 1 моделирования объекта тренажа с, Блок 1 моделирования объекта тренажа (фиГр 2) состоит из трех интеграторов 22-2 „ Узел имитации внешних воздействий состоит из генератора 19 шума и имитатора 3 сигналов воздействий. Блок регистрации имеет узел 18 сопряжения и узел 17 регистрации Блок отображения информации и принятия решения содержит дешифратор 16, узел 15 памяти, узел 1 отображения и узел 13 принятия решения. При этом выход блока 21 управления параметрами объекта тренажа подключен к управлящему входу блока 1 моделирования объекта тренажа, связанного информационным выходом с первым входом сумматора 6, второй вход которого подключен к выходу имитатора 7 фоновых помех, а выход - к входу индикатора 8, при этом управляющий выход блока отображения информации и принятия решения через адаптивный блок 20 подключен к входу блока 21 управления параметрами объекта тренажа После включения адаптивный комплекс для обучения работает следующим образом. Для совершенствования и контроля характеристик оператора, работа которого в человеко-машинной системе протекает по жесткой программе, т.е в соответствии с положениями инструк- ции, в программном блоке 2 генерируется соответствующая программа деятельности оператора« Электрические сигналы в виде двоичных позиционных кодов с третьего выхода программного блока 2 поступают на третий вход имитатора 3 сигналов воздействия, где они дешифрируются, и с его третьего выхода поступают на третий вход блока 1 моделирования объекта тренажа. Последний вырабатывает сигналы реакции, которые с его выхода подводятся на сумматор 6, где они суммируются с сигналами, поступающими на его второй вход с выхода имитатора фоновых помех 7. Зашумленный сигнал с выхода сумматоpa 6 поступает на вход индикатора 8, где и предъявлятся оператору путем отображения и сигнализации, и на первый вход формирователя сигналов 3°
Оператор, в соответствии с полученной информацией, воздействует на блок ручного управления, который вырабатывает сигналы управляющих воздействий, поступающие на четвертый вход блока 1 моделирования объекта тренажа и на второй вход блока 9 в котором производится их преобразование по амплитуде и длительности для согласования режимов работы обучающего комплекса„
Программа деятельности-оператора, генерируемая программным блоком 2, представляет собой матрицу двоичных позиционных кодов Каждая строка матрицы соответствует программе отработки той или иной задачи в зависимости от имитируемой ситуации. Каждый разряд строки соответствует номеру органа управления блока k,
Значения 1 предписываются разряду в случае задействования по программе в определенные моменты времени соответствующего органа управления, а значение О - в случае его незадействования
В программный блок 2 введена также программа последовательности отображения информации в соответствии с выбранной строкой матрицы и сигналом формирователя 9 сигналов Коды, задействованных строк матрицы, с выхода четвертого выхода программного блока 2 переписываются в блок 10 сравнения. На другой вход блока 10 сравнения с выходов блока Ц ручного управления и индикатора 8 через формирователь сигналов (по мере отработки оператором задач ) поступают электрические сигналы В блоке 10 сравнения производится сравнение порядка поступления сигналов, излишние и недостающие сигналы, время поступления сигналов раньше, позже) с их программными значениями.
В случае отклонения сигналы отклонения передаются на узел 18 сопряжения для кодирования и дальнейшего документирования в узле 17 регистрации.
а также на входы дешифратора 16, который преобразует коды двоичных сигналов признаков строк и признаков отклонений в сигналы одноадресных кодов.
Сигналы с выхода дешифратора 16 поступают через узел 15 памяти на.; первый вход узла 1 отображения для индикации числа ошибочных управляющих действий оператора и своевременности ( ИЛ1 несвоевременности ) их выполнения о
Для совершенствования и контроля эвристической деятельности оператора в программный блок 2 введена соответствующая программа его деятельности в системе оператор - обучающий комплекс
Программа эвристической деятельности оператора состоит из-двух подпрограмм. Первая из них предназначена для генераации начальных условий в состоянии объекта тренажа, а другая вносит изменения в динамику объекта тренажа, имитируя, тем самым отказы каких-либо его функциональных узлов о Тренаж и контроль характеристик скорости самообучаемости ( или адаптации) оператора производится следующим образом„
Программный блок 2 генерирует сигналы псев/1ослучайной двоичной последовательности, которая и задает начальные условия в состоянии блока 1 моделирования объекта тренажа. С второго выхода программного блока 2 электрические сигналы последовательности поступают на второй вход имитатора 3 сигналов воздействия, на другой вход которого поступают сигналы с генератора 19 шума (сигналы с генератора 19 шума имитируют воздействующие факторы среды на систему оператор - обучающий комплекс).
Поступившие на первый и второй входы имитатора 3 сигналов воздействия сигналы соответственно с генератора 19 шума и программного блока 2 умножаются. Сигнал, представляющий собой произведение указанных сигналов, с второго выхода имитатора 3 сигналов воздействия поступает на второй вход блока 1 моделирования объекта тренажа. Последний вырабатывает сигналы реакции, которые с его выхода подводятся через сумматор 6 на вход индикатора 8,где и предъявляются оператору путем отображения 7. - 10 и сигнализациир Также с выхода индикатора 8 этот же сигнал поступает на один из входов вычислительного блока 5. Оператор в соответстви 1 с получен ной стимульной ийформацией с индикатора 8 воэдейстйует на органы управ ления блока k который вырабатывает сигналы управлящих воздействий, поступающие с его выходов на четвертый вход блока 1 моделирования объекта тренажа и на второй вход вычислитель ного блока 5 Поступившие сигналы с индикатора 8 и блока k ручного управ ления на входы вычислительного блока являются основой для определения TBкущего состояния управляющих действий оператора, которое в вычислитель номблоке определяется по следующему аналитическому выражению; 1tT.((i)(i-oj, где ) - импульсная переходная функция, усредненная п времени и характеризую щая текущее состояние управляющих действий оператора; реакции оператора на стимульные сигналы, сн маемые с выхода блока ручного управления r y(t-t) стимульные сигналы, вы носимые на индикатор 8 t - временные задержки. Сигнал, представляющий собой прои ведение стимульного сигнала y(t-t) и реакции оператора x-y-(t)s с выхода вычислительного блока 5 поступает на первый вход второго блока 12 сравнения, на другой вход которого с выхода блока 13 эталонных импульсных пере ходных функций также поступает эталОнный сигнал, представляющий собой произведение стимульного сигнала y() и сигнала ) реакции эталонного оператора Во втором блоке 12 сравнения эти сигналы сравниваются и сигнал разности текущего сигнала и эталонногОр равный й(т;)х(Ь)(-тЬх(1:)(-ь-г), с выхода блока 12 поступает на вход узла 13 принятия решения в котором по 1 8 величине разности сигналов Т выносится решение о соответствии текущего состояния управляющих действий конкретного индивидуума оператора Jтребуемому его состоянию, а результат решения узлом 13 отображается узлом I4o Кроме того, введение отказов функциональных узлов объекта тренажа блока 1 осуществляется программно с использованием электрической связи первый выход программного блока 2 первый вход блока моделирования объекта тренажа. Рассмотрим осуществление данным устройством автоматического выбора уровня сложности решаемой оператором профессиональной задачи с учетом его текущего состояния скорости самообучаемости,, которое зафиксировано на предыдущем этапе„ Допустим, что оператор решает, например задачу компенсационного сленения. Также допустим, что после введения программным блоком 2, в частности, отказа динамика объекта тренажа стала неустойчивой и инерционной, Для рассматриваемого случая динамика неустойчивого и инерционного объекта тренажа смоделирована с помоцью двух последовательно соединенных интеграторов 23 и 2) (фиг. 3 )/ Когда оператор хорошо справляется с решением задачи компенсационного слежения, то сигнал л1т) ( рпзности текущего сигнала X (ijvit -Г) и эталонного X (,-t) Ъ1 (t - t) с выхода первого компаратора, которым дополнен узел 13 принятия решения и который на фиг„ 3 не представлен, поступает на второй вход узла И отображения, где и визуализируется световым табло„ При этом величина сигнала Л(С) является количественной характеристикой самообучаемости оператора о Если же оператор не справляется с решением поставленной задачи, на что объективно указывает величина сигнала (Т), то данный сигнал с выхода второго компаратора, которым также дополнен узел 15 принятия :рёшения и который также не представлен на фиг, 3, поступает на 5ход блока 20 и влияет на его коэофициент передачи в сторону уменьшения Си1- нал с выхода блока 20 поступает на вход блока 1 управления параг етрами объекта тренажа. 9100 Функциональное назначение блока 21 управления - изменять шунтирующее действие на цепи интеграторов 23 и 2k объекта тренажа блока 1 под в/мянием изменяющегося напряжения на выходе блока 20. В рассматриваемом случае с уменьшением сигнала на выходе блока 20 шунтирующее д ствие перемен ных резисторов ( усилители блока управления 21 ) увеличивается и, тем самым, уменьшается степень инерционности и неустойчивости динамики объекта тренажа блока 1. следствие этого уменьшается сложность задачи компенсационного слежения у оператора. Заметим, что мера сложности реиаемой оператором задачи компенсационного слежения точно соответствует его психофизиологическим возможностям по самообучению, Предлагаемое устройство позволяет повысить в среднем на 30 э(Х{1ективность тренажа операторов, так как оно оптимально учитывает индивидуальные возможности операторов для работы в недетерминированных человеко-машинных системах. Формула изобретения Адаптивный комплекс для о(1учения операторов систем управления, содержащий блок моделирования объекта тренажа, соединенный непосредственно и через узел имитации внешних воздей1. 10 ствий с программным блоком, подклю- ( ченным через первый блок сравнения i к формирователю сигналов, блоку регистрации отклонений в процессе тренажа и блоку отображения информации и принятия, решения, соединенному через второй блок сравнения с блоком эталонных импульсных переходных функций и вычислительнымiблоком, подключенным к блоку моделирования объекта тренажа и блоку ручного управления, соединенному с формирователем сигналов, и индикатор, связанный с вычислительным блоком и формирователем сигналов, отличающийся тем, что, с целью повышения эффективности тренажа, он имеет имитатор фоновых помех, сумматор, адаптивный блок и блок управле «1я параметрами объекта тренажа, выход которогоподключен к управляющему входу блока моделировам/1Я объекта тренажа, связанного информационным выходом с первым входом сумматора, второй вход которого подключен к выходу имитатора фоновых помех, а выход - к входу индикатора, при этом управляющий выход блока отображения информации и принятия решения через адаптивный блок подключен к входу блока управления параметрами объекта тренажа. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР по заявке № 3 50700/12, кл. G 09 В 9/00, 198К
4
