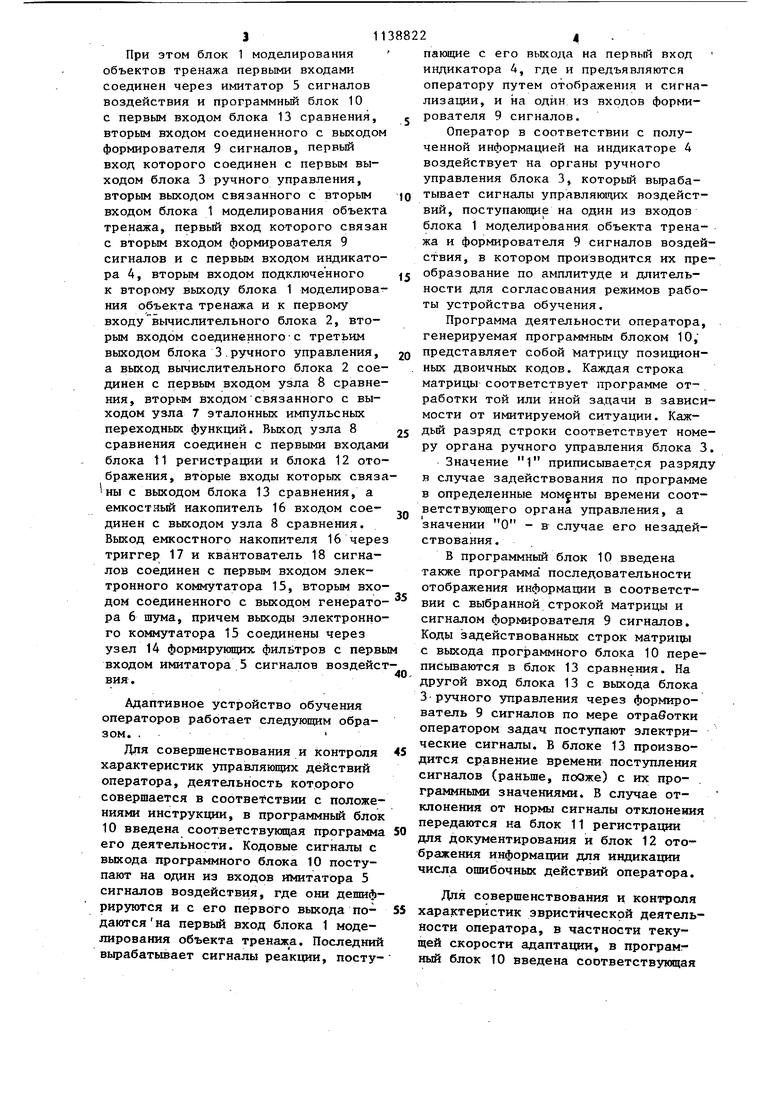
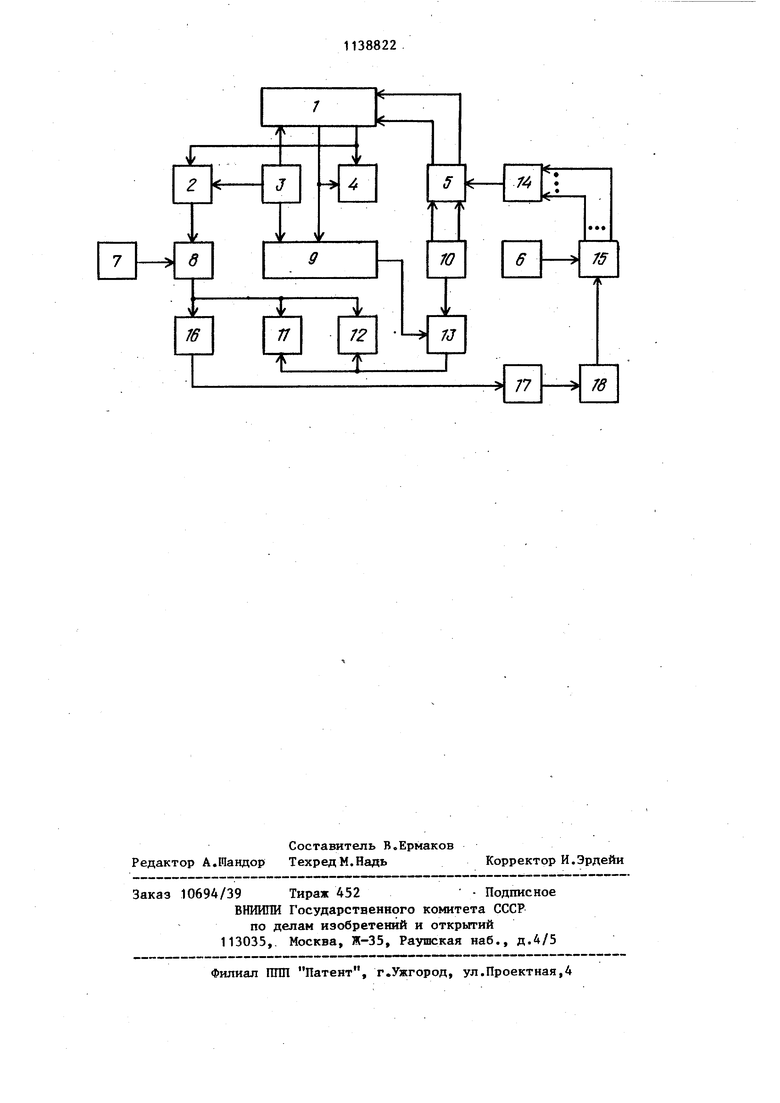
Изобретение относится к эргономике, в частности к устройствам обучения, и может быть использовано в отраслях народного хозяйства, проектирунлцих и эксплуатирующих человекомашинные системы, а также как часть тренажерной техники. Известно устройство обучения операторов, содержащее блок моделирован объекта тренажа, соединенный через имитатор сигналов воздействия с программным блоком, блок ручного управления, выходами подключенньй к входам блока моделирования объекта тренажа, вычислительного блока и формарователя сигналов, узел сравнения, первьй вход которого соединен с выхо дом вычислительного блока, второй вход подсоединен к выходу узла эталонных импульсных переиодных функций а выход узла сравнения подключен к одному из входов блока регистрации и блока отображения информации, гене ратор шума, соединенньй с одним из входов имитатора сигналов воздейстВИЯ, блок сравнения, первый вход которого соединен с выходом формирователя сигналов, второй вход подсоединен к одному из выходов программного блока, а выход блока сравне- ния подключен к одному из входов блока регистрации и блока отображения информации, индикатор, один вход которого соединен с первым выходом блока моделирования оьъекта тренажа и формирователя сигналов, другой вход подключен к второму выходу бло ка моделирования объекта тренажа и одному из входов вычислительного блока l . Недостаток известного устройства обучения операторов заключается в том, что оно не позволяет автоматически подстраивать воздействующие факторы на концептуальную модель субъекта в зависимости от его текущей скорости адаптации и тем самым снижает эффективность процесса обучения операторов. Цель изобретения - повышение эффективности процесса обучения операторов путем автоматической подстройки воздействующих факторов на концеп туальную модель субъекта в зависимос ти от текущей скорости адаптации инд видуума. Поставленная цель достигается тем, что адаптивное устройстзво обуч ния операторов, содержащее генератор шума, блок моделирования объектов тренажа, первые входы которого соединены через имитатор сигналов воздействия и программной блок с первым входом блока сравнения, вторым входом соединенного с выходом формирователя сигналов, первый выход которого соединен с первым выходом блока ручного управления, вторым выходом связанного с вторым входом блока моделирования объекта тренажа, первьй вход которого связан с вторым входом формирователя сигналов и с первым входом индикатора, вторым входом подключенного к второму выходу блока моделирования объекта тренажа и к .первому входу вычислительного блока, вторым входом соединенного с третьим вькодом блока ручного управления,.а выход вычислительного блока соединен с первым входом узла сравнения, вторьм входом связанного с выходом узла эталонных импульсных переходных функ1ЩЙ, а выход узла сравнения соединен с первыми входами блока регистрации и блока отображения, вторые входы которых связаны с выходом блока сравнения, имеет узел формирующих фильтров, электронньй коммутатор, квантователь сигналов, триггер и емкостный накопитель, вход которого соединен с выходом узла сравнения, а выход емкостного накопителя через триггер и квантователь сигналов соединен с первым входом электронного коммутатора, вторым входом соединенного с выходом генератора шума, причем выходы электронного коммутатора соединены через узел формирующих фильтров с первым входом имитатора сигналов воздействия. На чертеже представлена блок-схема адаптивного устройства обучения операторов. Схема содержит блок 1 моделирования объекта тренажа, вычислительный блок 2, блок 3 ручного управления, индикатор 4, имитатор 5 сигналов воздействия, генератор 6 шума, узел 7 эталонных импульсных переходных функций, узел 8 сравнения, формирователь 9 сигналов, программньй блок 10, блок 11 регистрации, блок 12 отображения информации, блок 13 сравнения, узел 14 формирующих фильтров, электронный коммутатор 15, емкостньй накопитель 16, триггер 17, квантователь 18 сигналов. При этом блок 1 моделирования объектов тренажа первыми входами соединен через имитатор 5 сигналов воздействия и программный блок 10 с первым входом блока 13 сравнения, вторым входом соединенного с выходом формирователя 9 сигналов, первый вход которого соединен с первым выходом блока 3 ручного управления, вторым выходом связанного с вторым входом блока 1 моделирования объекта тренажа, первьй вход которого связан с вторым входом формирователя 9 сигналов и с первым входом индикатора 4, вторым входом подключенного к второму выходу блока 1 моделирова ния объекта тренажа и к первому входу вычислительного блока 2, вторым входом соединенногос третьим выходом блока 3,ручного управления, а выход вычислительного блока 2 сое динен с первым входом узла 8 сравне ния, вторым входомсвязанного с выходом узла 7 эталонных импульсных переходных функций. Выход узла 8 сравнения соединен с первыми входам блока t1 регистрации и блока 12 ото бражения, вторые входы которых связ ны с выходом блока 13 сравнения, а емкостный накопитель 16 входом соединен с выходом узла 8 сравнения. Выход емкостного накопителя 16 чере триггер 17 и квантователь 18 сигналов соединен с первым входом электронного коммутатора 15, вторым вхо дом соединенного с выходом генерато ра 6 шума, причем выходы электронно го коммутатора 15 соединены через узел 14 формирукяцих фильтров с перв .5 сигналов воздейс входом имитатора Адаптивное устройство обучения операторов работает следующим образом. . Для совершенствования и контроля характеристик управляющих действий оператора, деятельность которого совершается в соответствии с положениями инструкции, в программный блок 10 введена соответствующая программа его деятельности. Кодовые сигналы с выхода программного блока 10 поступают на один из входов имитатора 5 сигналов воздействия, где они дешифрируются и с его первого выхода подаютсяна первый вход блока 1 моделирования объекта тренажа. Последний вырабатьшает сигналы реакции, поступающие с его выхода на первьй вход индикатора 4, где и предъявляются оператору путем отображения и сигнализации, и на один из входов формирователя 9 сигналов. Оператор в соответствии с полученной информацией на индикаторе 4 воздействует на органы ручного управления блока 3, который вырабатывает сигналы управляющих воздействий, поступающие на один из входов блока 1 моделирования объекта тренажа и формирователя 9 сигналов воздействия, в котором производится их преобразование по амплитуде и длительности для согласования режимов работы устройства обучения. Программа деятельности оператора, генерируемая: программным бло.ком 10, представляет собой матрицу позиционных двоичных кодов. Каждая строка матрицы соответствует программе от-. работки той или иной задачи в зависимости от имитируемой ситуации. Каждый разряд строки соответствует номеру органа ручного управления блока 3. Значение 1 приписьтается разряду в случае задействования по программе в определенные моменты времени соответствующего органа управления, а значении О - в случае его незадействования. В программный блок 10 введена также программа последовательности отображения информации в соответствии с выбранной строкой матрицы и сигналом формирователя 9 сигналов. Коды задействованных строк ма трихц) с выхода программного блока 10 переписьюаются в блок 13 сравнения. На другой вход блока 13 с выхода блока 3 ручного управления через формирователь 9 сигналов по мере отработки оператором задач поступают электрические сигналы. В блоке 13 производится сравнение времени поступления сигналов (раньше, пооже) с их программными значениями. В случае отклонения от иормы сигналы отклонения передаются на блок 11 регистрации для документирования и блок 12 отображения информации для индикации числа ошибочных действий оператора. Для совершенствования и контроля характеристик эвристической деятельйости оператора, в частности текущей скорости адаптации, в програмг ный блок 10 введена соответствующая
программа его деятельности в системе оператор - устройство обучения.
Программа эвристической деятельности оператора состоит из двух подпрограмм. Первая из них пр едназначена для генерации начальных условий в состоянии блока 1, а другая - вносит изменения в начальные условия состояния блока 1 моделирования объекта тренажа, имитируя тем самым отказы каких-либо функциональных узлов объекта тренажа.
Совершенствование и контроль характеристик текущей скорости адаптации оператора к условиям профессиональной задачи производится следующим образом.
Программный блок 10 генерирует сигналы двоичной псевдослучайной последовательности, которая задает начальные условия в состоянии объекта тренажа. С второго выхода программного блока 10 электрические сигналы указанной последовательности поступают на второй вход имитатора 5 сигналов воздействия, на другой вход которого поступают сигналы с генератора 6 шума через электронный коммутатор 15 и узел 16 формирующих фильтров. Сигналы генератора 6 шума имитируют воздействующие факторы среды на систему оператор - устройство обучения. Сигналы, поступившие на входы имита;торов 5 с программного блока 10 и :генератора 6 шума, перемножаются. Сигнал, представляющий собЬй произведение указанных сигналов, с второго выхода имитатора 5 подается на один из входов блока 1 моделирования объекта тренажа. Последний вьфабатывает сигналы реакций, которые с его выхода подводятся на второй вход индикатора 4, где и предъявляются оператору путем отображения и сигнализации. Сигналы реакции блока 1 моделирования объекта тренажа поступают также на первый вход вычислительного блока 2. I
Оператор в соответствии с полученной информацией на индикаторе 4 воздействует на органы ручного управления блока, вьфабатьшающего сигналы управляющих воздейст вий, поступаюпще с его выходов на один из входов блока 1 моделирования объекта тренажа и на второй вход вычислительного блока 2. Поступившие с индикатора 4 и блока 3 ручного управления на входы вычислительного блока 2 сигналы являются основой для определения текущего состояния управляющих действий оператора, которое в блоке 2 оценивается по следующему аналитическому выражению:
VCt hbtt-t lo-Ci),
где ) - импульсная переходная функ1шя, усредненная по времени и характеризующая текущее состояние управляницих действий оператора; a(t) - реакции оператора на информацию, вынесенную на индикатор 4; b(t ) - стимульные сигналы
(сигналы реакции объекта тренажа); f - временные задержки. Сигнал, представляющий собой произведение стимульного сигнала b(t - f) и реакции a(t) оператора и усредненный по времени, с выхода вычислительного блока 2 поступает на первый вход узла 8.сравнения, на другой вход которого с выхода узла 7 эталонных импульсных переходных функций также поступает эталонньй сигнал hз( f), представляющий собой произведение стимульного сигнала b(t -f) и сигнала а(t) реакции эталонного оператора, ус;редненньй по времени.
После сравнения указанных сигналов в узле 8 результирующий сигнал Д( Г)
4(t)6(,(tlbC-t-P|-oi(t) .
с выхода узла 8 сравнения подается на один из входов блока Т1 регистрации для документирования и блока 12 отображения информации для индикации текущего состояния управляющих действий оператора и на вход емкостного накопителя 16 сигналов. . Генерация, прохождение и обработка сигналов в устройстве обучения для совершенствования и контроля характеристики скорости адаптации оператора аналогична рассмотренной методике по оценке его текущего состояния управляющих действий. Только для определения характеристики скорости адаптации процедуру тестирования необходимо провести на двух вре менных интервалах Т и 2Т, соответственно используя подпрограммы эвристической деятельности оператора. Количественно определяется текущая скорость адаптации оператора по следующей формуле (.l-b(irlfcJf (t)-f J Tf l-VWjV текущая скорость адаптации оператора временные интервалы тестирования операто эталонная импульсная переходная функция; и тульсные переходны функции, характеризу ющие текущее состояние оператора на вре менных интервалах Т . . и 2Т соответственно В предлагаемом устройстве за счет автоматической настройки параметров воздействующих сигналов вьфабатьгоается допустимый диапазон изменения факторов, воздействующих на концептуальную модель субъекта в соответствии с.его текущей скоростью адаптации . Автоматическая настройка парамет ров воздействзпощих факторов на концептуальную модель субъекта в. зависимости от его текущей скорости адаптации физически реализуется сле дующим образом. Электрический сигнал, величина напряжения которого равна U./ji(jl ito с выхода емкостного накопителя 16 поступает на вход триггера 17, При превьппении поданным напряжением порога срабатывания триггера 17 сигнал с выхода триггера 17 подается через квантователь 18 .сигналов на один из входов электронного коммутатора шума. После соответствующей коммутации сигнал с выхода электронного коммутатора 15 поступает на вход узла 14 формирующих фильтров. При этом коэффициент передачи и полоса пропускания частот формирующего фильтра узла 14 прямо пропорциональны величине сигнала, поступакицего с емкостного накопителя 16. Таким образом, сформированный сигнал на выходе узла 14 формирующих фильтров, с помощью которого имитируются воздействующие факторы среды, по своим параметрам согласован с текущей скоростью адаптации оператора. Предлагаемое техническое решение позволяет повысить эффективность процесса обучения вследствие того, что параметры воздействующих факторов среды на концептуальную модель субъекта в процессе решения профессиональной задачи автоматически поддерживаются на таком зфовне, на котором оператор способен своевременно сформировать алгоритм управлякнцих действий, и тем самым обеспечивается оптимальная дозировка психофизиологических нагрузок и процессе обучения операторов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство обучения операторов систем управления | 1983 |
|
SU1121695A1 |
| Тренажер операторов систем управления | 1982 |
|
SU1053132A1 |
| Адаптивный комплекс для обучения операторов систем управления | 1982 |
|
SU1003131A1 |
| Адаптивный тренажер оператора | 1982 |
|
SU1086451A2 |
| Обучающее устройство | 1984 |
|
SU1249567A1 |
| Тренажер оператора | 1984 |
|
SU1174960A2 |
| Адаптивный тренажер оператора | 1982 |
|
SU1029215A2 |
| Тренажер оператора | 1981 |
|
SU959136A1 |
| Обучающее устройство | 1984 |
|
SU1244700A1 |
| Тренажер оператора | 1983 |
|
SU1098024A1 |
АДАПТИВНОЕ УСТРОЙСТВО ОБУЧЕНИЯ ОПЕРАТОРОВ, содержащее генера. тор шума, блок моделирования объектов тренажа, первые входы которого соединены через имитатор сигналов воздействия и программньй блок с первым входом блока сравнения, вторым входом соединенного с выходом формирователя сигналов, первый вход которого соединен с лервым выходом блока ручного управления, вторым выходом связанного с вторым входом блока моделирования объекта тренажа, первый вход которого связан с вторым входом формирователя сигналов и с первым входом индикатора, вторым входом подключенного к второму выходу блока моделирования объекта тренажа и к первому входу вычислительного блока, вторым входом соединенного с третьим выходом блока ручного управления, а выход вычислительного блока соединен с первым входом узла сравнения, вторым входом связанного с выходом узла эталонных импульсных переходных функций, а выход узла сравнения соединен с первыми входами блока регистрации и блока отображения, вторые входы которых связаны с выходом блока сравнения, о,тличающее с я тем, что, с целью повьшения эффективности процесса обучения, оно имеет узел, формируюпщх фильтров, электронный коммутатор, квантователь i сигналов, триггер и емкостный накосл питель, вход которого соединен с выходом узла сравнения, а выход емкостного накопителя через триггер и квантователь сигналов соединен с первым входом электронного коммутатора, вторым входом соединенного с выходом генератора шума, причем выходы электронного коммутатора соедиСлЭ 00 нены через узел форьйфующих фиЯьтров с первым входом имитатора сигоо ю ю налов воздействия.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
