Изобретение относится к эргономТГ ке, в частности к устройствам обучения операторов, выполняющих функции принятия решения и слежения. Известно устройство обучения операторов, содержащее блок моделирования объекта тренажа, два первых входа которого через имитатор сигналов воздействия соединены с соответствующими выходами программного блока, генератор шума, соединенный с одним .из входов имитатора сигналов воз1действия, вычислительный блок, первый вход которого электрически связан с первым выходом блока моделирования объекта тренажа и с первым входом индикатора, второй вход подсоединен к одному из выходов блока ручного управления, а выход вычислительного блока через узел сравнения соединен с первым входом блока регистрации и отображения информации контроля, узел эталонных импульсных переходных функций, соединенный с одним из входов узла сравнения, формирователь сигналов, первый вход которого через блок ручного управления подключен к третьему входу блока моделирования объекта, тренажа, второй вход подсоединен ко второму входу индикатора и второму выходу блока моделирования объекта тренажа, а выход формирователя сигналов через блок сравнения соединен со вторым .входом блока регистрации и отображения информации контроля, причем третий выход программного блока подключен ко второму входу блока сравнения. Однако в известном устройстве не предусмотрен текущий объективный кон роль величины неполноты информации о состоянии объекта тренажа, которая возникает в контуре автоматизированной системы управления объектом в случае отказа каких-либо Функциональ ных узлов, блоков и подсистем объекта управления в условиях воздействую щих факторов среды на систему оператор - устройство обучения, вследстви чего снижается эффективность тренажа Цель изобретения - повышение эффективности тренажа путем введения текущего объективного контроля величины негГолноты информации, возникающей в контуре автоматизированной сис темы управления объектом в условиях воздействующих факторов среды и при отказах каких-либо функциональных уз лов, блоков или подсистем объекта управления. Поставленная цель достигается тем, что устройство обучения операторов систем управления, содержащее блок регистрации и контроля, блок моделирования объекта тренажа, первый и второй входы которого соединены с первым и вторым выходами имитатора сигналов воздействия,первым вхо-. |дом соединенного с первым выходом программного блока, вторым выходом связанного с первым входом блока сравнения, вторым входом соединенного с выходом (Формирователя, первый вход которого связан с первым входом индикатора, вторым входом связанного с первым выходом блока моделирования объекта тренажа и с первым входом вычислительного блока, вторым входом подключенного к выходу блока ручного управления, первый вход которого соединен с третьим входом блока моделирования объекта тренажа, второй выход блока ручного управления соединен со вторым входом формирователя, а узел эталонных импульсных переходных функций соединен с первым входом узла сравнения имеет дополнительный блок моделирования объекта тренажа, узел управления параметрами состояний объекта тренажа, модулятор, дополнительный вычислительный блок и коммутатор, первым входом соединенный с выходом вычислительного блока, выход коммутатора соединен со вторым входом узла .сравнения, выходом связанного с первым входом блока регистрации и контроля, вторым входом связанного с выходом блока сравнения, при этом третий выход программного блока соединен со вторым входом коммутатора, третьим входом связанного с выходом дополнительного вычислительного блока, первым входом соединенного с выходом дополнительного блока моделирования объекта тренажа, первым входом соединенная со вторым выходом имитатора сигнала воздействия, вторым входом связанного с четвертым выходом програлчмного блока, первый выход которого соединен с первым входом модулятора , вторым входом подключенного к третьему входу имитатора сигналов воздействия и к выходу генератора шума, а выход модулятора связан через узел управления параметрами состояния объекта тренажа со вторыми входами дополнительного блока моделирования объекта тренажа и дополнительного вычислительного блока. На фиг.1 приведено устройство обучения, блок-схема; на фиг.2 - узел управления параметрами состояния объекта тренажа, блок-схема. Устройство обучения операторов содержит блок 1 моделирования объекта тренажа, вычислительный блок 2, . блок 3 ручного управления, индикатор 4, генератор 5 шума, узел б сравнения, узел 7 эталонных импульсных переходных , формирователь 8 сигналов, имитатор 9 сигналов воздействия блок 10 регистрации и контроля, блок 11 сравнения, программный блок 12, дополнительный блок 13 моделирования объекта тренажа, узел 14 управления параметрами состояния , объекта тренажа, коммутатор 15, модулятор 16, дрполнительный вычислительный блок i, при этом блок 1 моделирования объекта тренажа первым и вторым входами соединен с первым и вторым выходами имитатора 9 сигналов воздействия, первым входом соединенного с первым в лходом программного блока 12, вторым выходом связанного с первым входом блока 11 сравнения, вторым входом соединенного с выходом формирователя 8, первый входкоторого связан с первым входом индикатора 4, вторым входом связанного с первым выходом блока 1 моделирования объекта тренажа и с первым входом вычислительного блока 2, вторым входом подключенного к выходу блока 3 ручного управления, первый выход которого соединен с третьим входом блока 1 моделирования объекта тренажа, второй выход блока 3 ручного управления соединен со вторым входом формирователя 8, а узел эталонных импульсных переходных Лункций 7 соединен с первым входом узла б сравнения, а коммутатор 15 первым входом соединен с выходом вычислительного блока 2, выход коммутатора 15 соединен со вторым входом узла сравнения б, выходом связанного с первым входом блока регистрации и контроля 10, вторым входом связанного с выходом блока 11 сравнения, при этом третий выход nporpat-iMHoro блока 12 соединен со. вторым входом коммутатора 15, третьим входом связанного с выходом дополнительного вычислительного блока 17, первым входом соединенного с выходом дополнительного блока 13 .мо-, делирования объекта тренажа, первым входом соединенного со вторым выходом имитатора 9 сигналов воздействия, вторым входом связанного с четвертым выходом программного блока 12, первый выход которого соединен с первым входом модулятора 16, вторым входом подключённого к третьему входу имитатора 9 сигналов воздействия и к выходу генератора шума 5, а выход модулятора 16 связан через узел 14 управления параметрами состояния объекта тренажа со вторыми входами дополнительного блока 13 моделирования объекта тренажа и дополнительного вычислительного блока 17.
После включения устройство обучения операторов работает следующим образом.
Для совершенствования и контроля характеристик деятельности оператора, управлАющие действия которого совершаются в соответствии положения инструкции, в программный блок 12 введена соответствующая-программа деятельности операторов, представляющая собой матрицу позиционных двоичных кодов.
Каждая строка матрицы соответствует программе отработки оператором той или иной ситуации в зависимости от имитируемой задачи. Каждый разряд строки соответствует номеру органа ручного управления блока f.
Значение 1 приписывается разряду в случае задействования по прог0рамме в определенные моменты времени соответствующего органа управления блока 4, а значение О - в случае его незадействования.
Кодовые сигналы с выхода программного блока 12 поступают на первый
5 вход имитатора 9 сигналов воздействия, где они дешифрируются, и с его первого выхода подаются на один из входов блока 1 моделирования объекта тренажа. Последний выраба0тывает сигналы реакции, поступающие с его второго выхода на второй вход формирователя 8 сигналов и второй вход индикатора 4, где и предъявляются оператору путем отображения и
5 сигнализации.
Оператор в соответствии с полученной информацией на индикаторе 4 воздействует на органы ручного управления блока 3, который вырабаты0вает сигналы управляющих воздействий поступающих на третий вход блока 1 моделирования объекта тренажа и на первый вход формирователя 8 сигналов, В формирователе 8 сигналов про5изводится преобразование поступивших сигналов по амплитуде и длительности с целью согласования режимов работы устройства в целом. Сформированный сигнал с выхода формирователя 8 сигналов подается на Первый
0 вход блока 11 сравнения, на другой вход которого подаются эталонные сигналы с третьего выхода -п.рограммного блока 12. В блоке 11 сравнения поступившие сигналы сравниваются по ам5плитуде и длительности. .При несравнении указанных сигналов сигналы отклонения с выхода блока 11 подаются на один из входов блока 10 регистрации и отображения информации контро0ля для документирования снпибочных действий оператора и их визуализации на табло блока 10«
Для совершенствования и контроля характеристик эвристической деятель5ности оператора в программный блок 12 введена- соответствующая программа деятельности операторов,которая включает две подпрограммы. Первая подпрограмма блока 12 предназначена для ге0нерации условий в состоянии объекта тренажа,вторая подпрограмма вносит изменения в начальные условия состояния объекта тренажа,параметры сигнала которой соответствуют тому или иному состоянию объекта тренажа (блока 1),
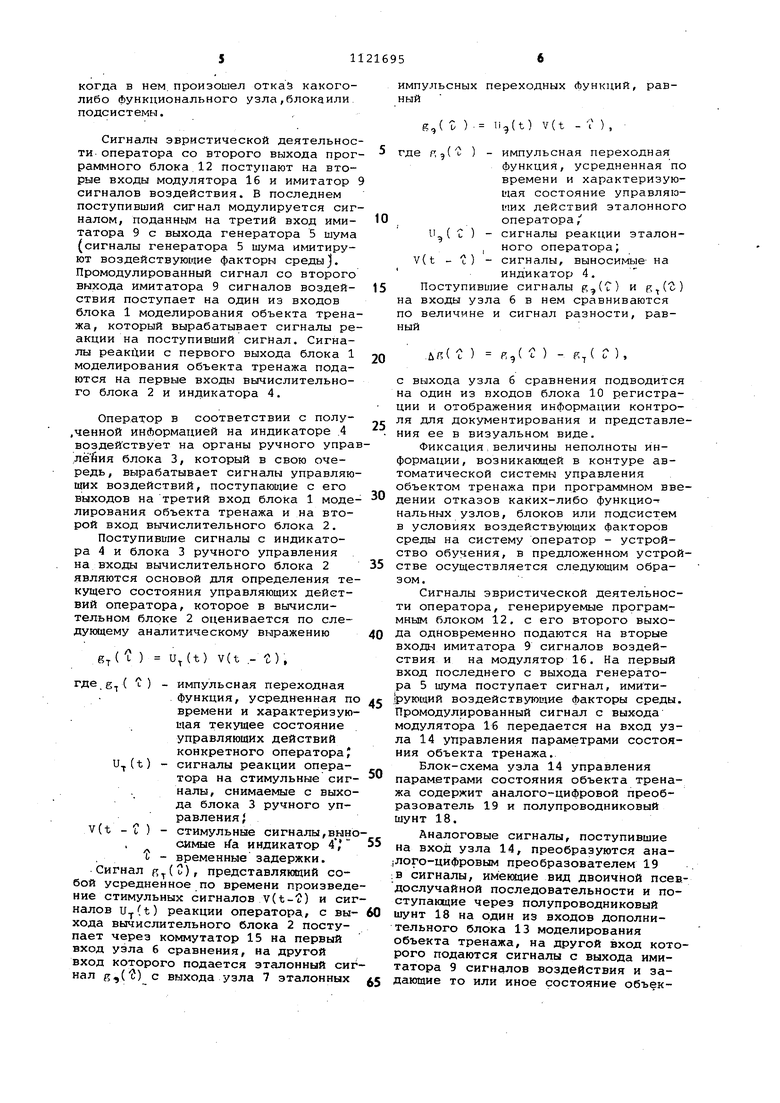
5 когда в нем. произошел откаЭ какоголибо функционального узла,блокаили подсистемы. Сигналы эвристической деятельнос ти оператора со второго выхода прог раммного блока 12 поступают на вторые входы модулятора 16 и имитатор сигналов воздействия. В последнем поступивший сигнал модулируется сиг налом, поданным на третий вход имитатора 9 с выхода генератора 5 шума (сигналы генератора 5 шума имитируют воздействующие факторы среды). Промодулированный сигнал со второго выхода имитатора 9 сигналов воздействия поступает на один из входов блока 1 моделирования объекта трена жа, который вырабатывает сигналы ре акции на поступивший сигнал. Сигналы реакции с первого выхода блока 1 моделирования объекта тренажа подаются на первые входы вычислительного блока 2 и индикатора 4. Оператор в соответствии с полу.ченной информацией на индикаторе .4 воздействует на органы ручного упра лёйия блока 3, который в свою очередь, вырабатывает сигналы управляю щих воздействий, поступающие с его выходов на третий вход блока 1 моде лирования объекта тренажа и на второй вход вычислительного блока 2. Поступившие сигналы с индикатора 4 и блока 3 ручного управления на входы вычислительного блока 2 являются основой для определения те кущего состояния управляющих действий оператора, которое в вычислительном блоке 2 оценивается по следующему аналитическому выражению g( L ) и (t) v(t - -г) , где g ( L ) - импульсная переходная функция, усредненная п времени и характеризую щая текущее состояние управляющих действий конкретного оператора U(t) - сигналы реакции оператора на стимульные сиг налы, снимаемые с выхо да блока 3 ручного управления J v(t - С ) - стимульные сигналы,вын симые rfa индикатор 4, . I) - временные задержки. Сигнал р(о), представляющий собой усредненное по времени произвед ние стимульных сигналов v(t-) и си налов u(t) реакции оператора, с вы хола вычислительного блока 2 поступает через коммутатор 15 на первый вход узла 6 сравнения, на другой вход которого подается эталонный си нал ) С выхода узла 7 эталонных импульсных переходных функций, равныйg,( г ) . ) v(t - iM, где } - импульсная переходная функция, усредненная по времени и характеризующая состояние управляющих действий эталонного оператора/ U ( С ) - сигналы реакции эталонI ного оператора; v(t - . } - сигналы, выносимые- на индикатор 4. Поступившие сигналы g,(C) и g(5) на входы узла 6 в нем сравниваются по величине и сигнал разности, равный-«,(), с выхода узла 6 сравнения подводится на один из входов блока 10 регистрации и отображения информации контроля для документирования и представления ее в визуальном виде. Фиксация,величины неполноты информации, возникающей в контуре автоматической системы управления объектом тренажа при программном введении отказов каких-либо функцио-г нальных узлов, блоков или подсистем в условиях воздействующих факторов среды на систему оператор - устройство обучения, в предложенном устройстве осуществляется следующим обра3 ом. Сигналы эвристической деятельности оператора, генерируемые программным блоком 12. с его второго выхода одновременно подаются на вторые входы имитатора 9 сигналов воздействия и на модулятор 16. На первый вход последнего с выхода генератора 5 шума поступает сигнал, имити1,рующий воздействующие факторы среды. Промодулированный сигнал с выхода модулятора 16 передается на вход узла 14 управления параметрами состояния объекта тренажа. Блок-схема узла 14 управления параметрами состояния объекта тренажа содержит аналого-цифровой преобразователь 19 и полупроводниковый шунт 18. Аналоговые сигналы, поступившие на вход узла 14, преобразуются ана Лого-цифровым преобразователем 19 ;В сигналы, имеющие вид двоичной псевдослучайной последовательности и поступающие через полупроводниковый шунт 18 на один из входов дополнительного блока 13 моделирования объекта тренажа, на другой вход которого подаются сигналы с выхода имитатора 9 сигналов воздействия и задающие то или иное состояние объекта тленажа- (.блок 13), изменяемое синалами, поступающими с выхода полупроводникового шунта 18, по закону двоичной псевдослучайной последовательности. Сигналы реакции блока 13 моделирования объекта тренажа с его выхода поступают на второй вход дополнительного вычислительного блока 17, на первый вход которого подаются сигналы с выхода узла 14 управления параметрами объекта трена са.
Сигналы, поступившие с выходов дополнительного блока 13 моделирования объекта тренажа и узла 14 управления параметрами состояния объекта тренажа на входы дополнительного вычислительного блока 17, являются основой;- для определения текущего состояния дополнительного блока 13 моделирования объекта тренажа, которое в блоке 17 оценивается по следующему аналитическому вмражению
) (t) Y(t -С-), где h (С) - импульсная переходная
СО
функция, усредненная п времени и характеризующая текущее состояние объектатренажа (блока 13),
Х (t) - сигналы реакции блока 13 моделирования объекта тренажа,
VH - L ) - сигналы двоичной псевдослучайной последовательности на выходе узл ла 14,
временные задержки. Алгоритм вычисления дополнительного блока 17 аналогичен алгоритму вычисления блока 2.
Сигнал ) с выхода дополнительного вычислительного блока 17 поступает на вход коммутатора 15, на другой вход которого подается сигнал с выхода программного блока 12 для соответствующего переключения цепей в коммутаторе 15. Далее сигнал h(() с выхода коммутатора 15
подводится на второй вход узла б сравнения. На первый вход последнего подается эталонный сигнал h, (О ) с выхода узла 7 эталонных импульсных переходных Функций, равный
h,(C) X(t) Y(t - ),
где h (С ) - импульсная переходная
функция, усредненная по
0 времени и характеризующая начальное (невозмущенпое) состояние объекта (блок 13),
x(t) - сигналы на выходе имитатора 9 сигналов воздей5ствия, генерируемые блоком 12 в соответствии первой подпрограммы и без учета сигналов, вырабатываемых генератором 5 шу0ма.
Y(t - С ) - сигналы реакции блока 13 моделирования объекта тренажа на сигнал X(t).
,. Поступившие сигналы h ({) и ) ,на входы узла 6 в нем сравниваются. Сигнал разности A.h(C), равный
h() - h,.
(- ).
дьсг )
с выхода узла 6 сравнения поступает на один из входов блока 10 регистрации и отображения информации контроля для регистрации и представления в визуальном вице величины д.ь( ) неполноты информации, возникаюодей в процессе введения отказов каких-либо
фУНКЦИОНгиЛЬНЫХ узлов , блоков или ПОД
систем в условиях воздействующих факторов среды.
Изобретение позволяет объективно и кбличественно контролировать величину неполноты информации в контуре автоматизированной системы управления, что позволяет дозировать психофизиологические нагрузки обучаемых операторов, и, как следствие - обеспечивает существенное повышение эфлективности процесса обучения.
Фиг. 1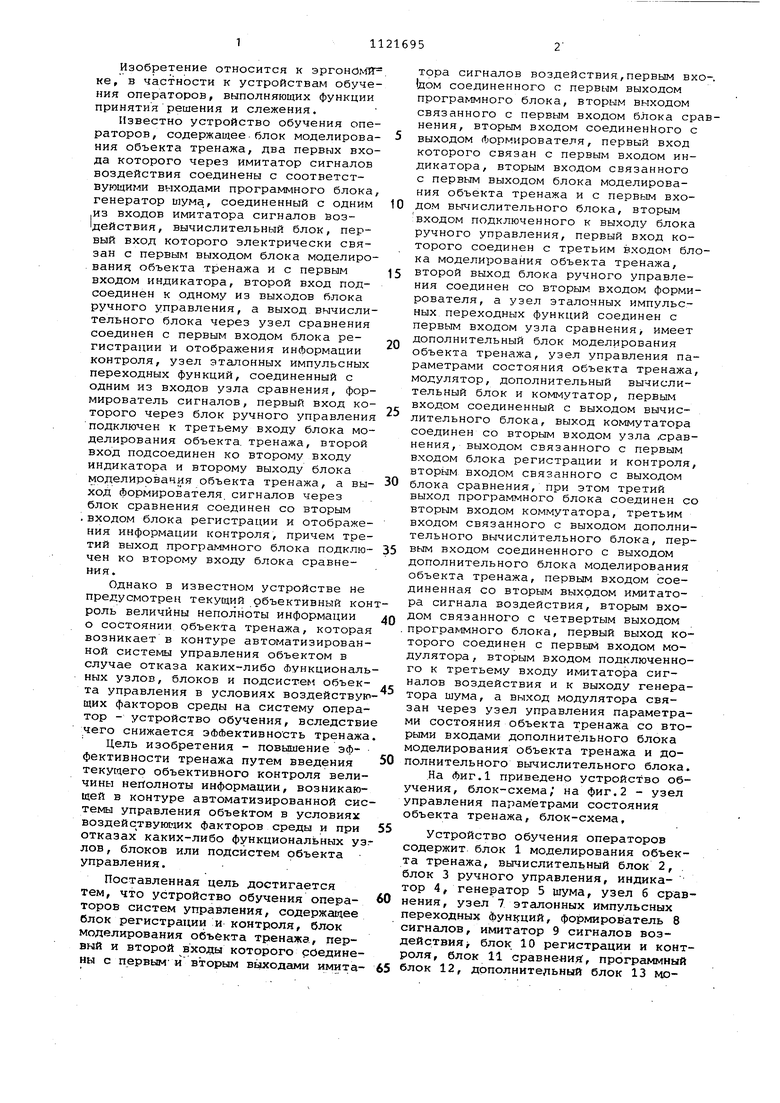

| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивное устройство обучения операторов | 1983 |
|
SU1138822A1 |
| Тренажер операторов систем управления | 1982 |
|
SU1053132A1 |
| Адаптивный тренажер оператора | 1982 |
|
SU1086451A2 |
| Адаптивный комплекс для обучения операторов систем управления | 1982 |
|
SU1003131A1 |
| Обучающее устройство | 1984 |
|
SU1249567A1 |
| Тренажер оператора | 1984 |
|
SU1174960A2 |
| Обучающее устройство | 1984 |
|
SU1244700A1 |
| Адаптивный тренажер оператора | 1982 |
|
SU1029215A2 |
| Устройство для обучения операторов систем управления | 1986 |
|
SU1434479A1 |
| Устройство обучения операторов систем управления | 1983 |
|
SU1211792A1 |
УСТРОЙСТВО ОБУЧЕНИЯ ОПЕРА- . ТОРОВ СИСТЕМ УПРАВЛЕНИЯ, содержащее блок регистрации и контроля, блок моделирования объекта тренажа, первый и второй входы которого соединены, с первым и вторым выходами имитатора сигналов воздействия, первым входом соединенного с первым выходом программного блока, вторым выходом связанного с первым входом блока сравнения, вторым входом соединенного с выходом Формирователя,первый вход которого связан с первым входом индикатора,вторым входом связанного с первым выходом блока моделирования объекта тренажа и с первым входом вычислительного блока, вторым входом подключенного к выходу блока ручного управления, первый вход которого соединен с третьим входом блока моделирования объекта тренажа, второй выход блока ручного управления соединен со вторым входом формирователя, а узел эталонных импульсных переходных функций соединен с первым входом /зла сравнения, отличающеевСПГОЮЗйДЯ JUHO 3 с я тем, что, с целью повышения эффективности тренажа, оно имеет дополнительный блок моделирования объекта тренажа, узел управления параметрами состояния объекта тренажа, модулятор, дополнительный вычислительный блок и коммутатор, первым входом соединенный с выходом вычислительного блока,выход коммутатора соединен.со вторым входом узла сравнения , выходом связанного с первым входом блока регистрации и контроля, вторым входом связанного с выходом блока сравнения, при этом третий выход программного блока соединен со вторым входом коммутатора, третьим входом связанного с выходом дополни«м тельного вычислительного блока, пер вым входом соединенного с выходом до полнительного блока моделирования объекта тренажа, первым входом соединенного со вторым выходом имитатора сигнала воздействия, вторым входом связанного с четвертым выходом программного блока, первый выход которого соединен с первым входом модулятора, вторым входом подключенного к третьему входу имитатора сигналов воздействия и к выходу генератора шума, а выход модулятора связан через узел управления параметрами состояния объекта тренажа со вторыми входами дополнительного блока моделирования объекта тренажа и дополняй- , тельного вычислительного блока.
Фие Z
| I.Авторское свидетельство СССР , кл | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
