(54) ТРЕНАЖЕР ОПЕРАТОРА


| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер операторов систем управления | 1982 |
|
SU1053132A1 |
| Адаптивный тренажер оператора | 1982 |
|
SU1029215A2 |
| Адаптивный тренажер оператора | 1982 |
|
SU1086451A2 |
| Тренажер оператора | 1983 |
|
SU1098024A1 |
| Тренажер оператора | 1983 |
|
SU1191930A2 |
| Адаптивный комплекс для обучения операторов систем управления | 1982 |
|
SU1003131A1 |
| Тренажер оператора | 1984 |
|
SU1174960A2 |
| Устройство обучения операторов систем управления | 1983 |
|
SU1211792A1 |
| Устройство обучения операторов систем управления | 1983 |
|
SU1121695A1 |
| Адаптивное устройство обучения операторов | 1983 |
|
SU1138822A1 |


Изобретение относится к тренажерам операторов и может найти применение в качестве устройства для обучения операторов систем управления. Известен тренажер оператора, содержащий блок моделирования объекта тренажа, первый вход и первый выход которого соединены, соответственно, с первыми входом и выходом имитатора сигналов воздействия, второй выход через индикатор соединен с блоком формирования сигналов, второй вход которого связан с первым выходом блока ручного управления, подключенного вторым выходом ко второму входу моделирования объекта тренажа, выходы блока формирования сигналов соединены, соответственно, с первым входом блока сравнения и входом программного блока, первый выход которого связан со вторым входом блока сравнения, второй его выход подключен ко второму входу имитатора сигналов воздействия, связанного вторым выходом с третьим входом блока формирования сигналов, причем выходы блока сравнения связаны со входами блока регистрации и отображения информации 1.. Недостатком известного тренажера является невысокая эффективность тренажа. Цель изобретения - повышение эффективности тренажа. Поставленная.цель достигается тем, что тренажер оператора, содержащий блок моделирования объекта тренажа, первый вход и первый вь1ход которого соединены, соответственно, с первыми входом и выходом имитатора сигналов воздействия, вторбй выход через индикатор соединен с блоком формирования сигналов, второй вход которого связан с первым выходом блока ручного управления, подключенного вторым выходом ко второму входу блока моделирования объекта тренажа, выходы, блока формирования сигналов соединены соответственно с первым входом блока сравнения и входом программного блока, первый выход которого связан со. вторым входом блока сравнения, а второй его выход подключен ко второму входу имитатора сигналов воздействия, связанного вторым выходом с третьим входом блока формирования сигналов, причем выходы блока сравнения связаны со входами блока регистрации и отображения информации, имеет дополнительный блок сравнения.
блок принятия решений, вычислительный блок, блок эталонных импульсных переходных функций и генератор шума, выход которого подключен к третьему входу имитатора сигналов воздействия второй выход блока моделирования объекта тренажа дополнительно через последовательно соединенные вычислительный блок, дополнительный блок сравнения подключен ко входу блока принятия решений, выход которого связан с информационным входом блока регистрации и отображения информации, причем управляюший вход дополнительного блока сравнения подключен к выходу блока эталонных импульсных переходных функций, а информационный вход вычислительного блока подключен к третьему выходу блока ручi oro управления.
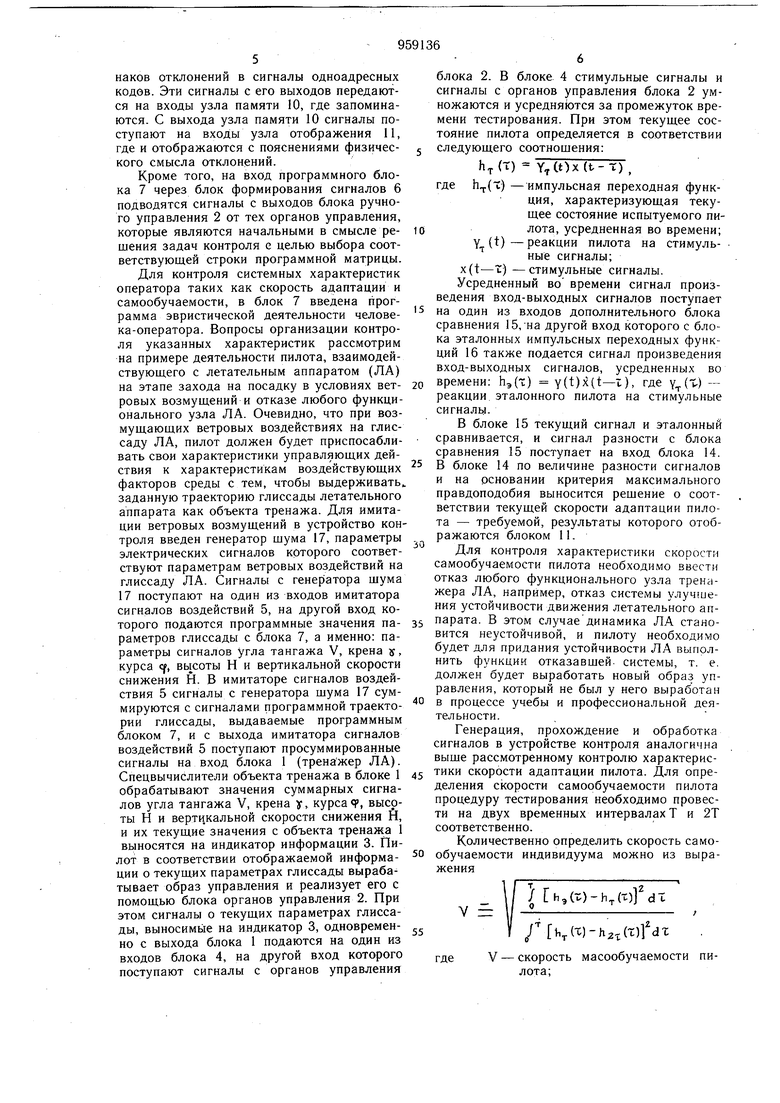
На фиг. 1 представлена функциональная схема тренажера; на фиг. 2 - блок-схема вычислительного блока.
Тренажер содержит блок 1 моделирования объекта тренажа, соединенный с блоком ручного управления 2, индикатором 3, вычислительным блоком 4 и имитатором сигналов воздействия 5. Один выход блока ручного управления 2 и выхода индикатора 3 и имитатора сигналов воздействия 5 соединены с входами блока формирования сигналов 6, а другой выход блока ручного управления 2 подключен ко второму входу вычислительного блока 4. Входы программного блока 7 и блока сравнения 8 соединены с выходами блока формирования сигналов 6. Один из выходов программного блока 7 соединен со входом блока сравнения 8, другой - со входом имитатора сигналов воз71ействия 5, а третий - со входом блока 1 моделирования. Блок сравнения 8 соединен через дешифратор 9 и узел памяти 10 со входом узла отображения 11, а через узел сопряжения 12 - со входом узла регистрации 13. Второй вход узла отображения 11 подключен к выходу блока 14 принятия решений, а вход последнего соединен через дополнительный блок сравнения 15 с выходом блока 4 и выходом блока эталонных импульсных переходных функций 16. Выход генератора шума 17 подключен ко второму входу имитатора сигналов воздействия 5. Блок регистрации и отображения информации имеет дешифратор 9, узел 10 памяти, узел 11 отображения, узел 12 сопряжения и узел 13 регистрации информации.
Вычислительный блок (фиг. 2) содержит узел памяти 18, узел временных задержек 19, узел вычисления 20, узел регистрации 21, узел управления 22, узел сдвигов 23, узел сверток 24.
После включения тренажер работает следующим образом.
Программный блок 6 в соответствии с заложенной программой деятельности оператора выдает управляюшие сигналы, поступаюшие на вход имитатора сигналов воздействия 5, в котором модулируются сигналами генератора шума 17. В имитаторе 5 формируются сигналы воздействия на блок 1 в виде двоичной псевдослучайной последовательности, в частности, последовательности,
подаваемой программно на блок 1. Последний вырабатывает сигналы реакций, которые с его выходов подводятся на вход индикатора 3, где предъявляются оператору путем отображения и сигнализации, и на один из входов вычислительного блока 4, а та(же -
на вход имитатора сигналов воздействия 5 с целью влияния на логические элементы и отображения результатов воздействия.
Оператор в соответствии с полученной информацией с индикатора 3, воздействует на блок ручного управления 2, который вырабатывает сигналы управляющих воздействий, поступающие с его выходов на один из входов блока 1 и второй вход вычислительного блока 4. Сигналы с блока ручного управления 2, индикатора 3, имитатора 5 поступают с их выходов на входы блока формирования сигналов 5, в котором производится их преобразование по амплитуде и длите/1ьности для согласования режимов работы устройства.
Сигнал того или иного воздействия имитатора 5 с выходов блока формирования сигналов 6 передается на вход программного блока 7, в котором введена программа управляющих действия оператора, представляющая собой матрицу позиционных двоичных кодов. Каждая строка матрицы соответствует программе отработки той или иной задачи в зависимости от имитируемой ситуации.
Каждый, разряд строки соответствует номеру блока управления 2. Значение «1
5 прип сывается разряду в случае задействования по программе в определенные моменты времени соответствующего органа управления, а значение «О - в случае его незадействования.
В программный блок 7 введена также программа последовательности отображения информации в соответствии с выбранной строкой матрицы сигнала блока формирования сигналов 6. Коды задействованных строк матрицы с выхода программного блока 7 переписываются в блок сравнения 8. На вход блока сравнения 8 с выхода блока ручного управления 2 и индикатора 3 через блок формирования сигналов 6 по мере отработки оператором задач поступают электрические сигналы. В нем производится сравнение порядка поступления сигналов (раньще, позже) с их программными значениями. В случае отклонений сигналы отклонения передаются на входы блока сопряжения 12 для кодирования и дальнейшего документирования в блоке регистрации 13 и на входы дешифратора 9, который преобразует коды двоичных сигналов признаков строк и признаков отклонений в сигналы одноадресных кодов. Эти сигналы с его выходов передаются на входы узла памяти 10, где запоминаются. С выхода узла памяти 10 сигналы поступают на входы узла отображения 11, где и отображаются с пояснениями физического смысла отклонений. Кроме того, на вход программного блока 7 через блок формирования сигналов 6 подводятся сигналы с выходов блока ручного управления 2 от тех органов управления, которые являются начальнымн в смысле решения задач контроля с целью выбора соответствующей строки программной матрицы. Для контроля системных характеристик оператора таких как скорость адаптации и самообучаемости, в блок 7 введена программа эвристической деятельности человека-оператора. Вопросы организации контроля указанных характеристик рассмотрим на примере деятельности пилота, взаимодействующего с летательным аппаратом (ЛА) на этапе захода на посадку в условиях ветровых возмущений и отказе любого функционального узла ЛА. Очевидно, что при возмущающих ветровых воздействиях на глиссаду ЛА, пилот должен будет приспосабливать свои характеристики управляющих действия к характеристикам воздействующих факторов среды с тем, чтобы выдерживать заданную траекторию глиссады летательного аппарата как объекта тренажа. Для имитации ветровых возмущений в устройство контроля введен генератор шума 17, параметры электрических сигналов которого соответствуют параметрам ветровых воздействий на глиссаду ЛА. Сигналы с генератора шума 17 поступают на один из входов имитатора сигналов воздействий 5, на другой вход которого подаются программные значения параметров глиссады с блока 7, а именно: параметры сигналов угла тангажа V, крена у, курса cf, BbicoTbi Н и вертикальной скорости снижения Н. В имитаторе сигналов воздействия 5 сигналы с генератора шума 17 суммируются с сигналами программной траектории глиссады, выдаваемые программным блоком 7, и с выхода имитатора сигналов воздействий 5 поступают просуммированные сигналы на вход блока 1 (тренажер ЛА). Спецвычислители объекта тренажа в блоке 1 обрабатывают значения суммарных сигналов угла тангажа V, крена у, курса, высоты Н и вертикальной скорости снижения Н, и их текущие значения с объекта тренажа 1 выносятся на индикатор информации 3. Пилот в соответствии отображаемой информации о текущих параметрах глиссады вырабатывает образ управления и реализует его с помощью блока органов управления 2. При этом сигналы о текущих параметрах глиссады, выносимьш на индикатор 3, одновременно с выхода блока 1 подаются на один из входов блока 4, на другой вход которого поступают сигналы с органов управления блока 2. В блоке 4 стимульные сигналы и сигналы с органов управления блока 2 умножаются и усредняются за промежуток времени тестирования. При этом текущее состояние пилота определяется в соответствии следующего соотнощения: НтСГ) YT(t)x(t-t) , где h(t) -импульсная переходная функция, характеризующая текущее состояние испытуемого пилота, усредненная во времени; Y (t)-реакции пилота на стимуль- ные сигналы; x(t-t) -стимульные сигналы. Усредненный во времени сигнал произведения вход-выходных сигналов поступает на один из входов дополнительного блока сравнения 15,-на другой вход которого с блока эталонных импульсных переходных функций 16 также подается сигнал произведения вход-выходных сигналов, усредненных во времени: ) Y(t)x(t-t), где (,) - реакции эталонного пилота на стимульные сигналы. В блоке 15 текущий сигнал и эталонный сравнивается, и сигнал разности с блока сравнения 15 поступает на вход блока 14. В блоке 14 по величине разности сигналов и на основании критерия максимального правдоподобия выносится решение о соответствии текущей скорости адаптации пилота - требуемой, результаты которого отображаются блоком 11. Для контроля характеристики скорости самообучаемости пилота необходимо ввести отказ любого функционального узла тренажера ЛА, например, отказ системы улуч иения устойчивости движения летательного аппарата. В этом случае динамика ЛА становится неустойчивой, и пилоту необходимо будет для придания устойчивости ЛА выполнить функции отказавшей, системы, т. е. должен будет выработать новый обра:з управления, который не был у него выработан в процессе учебы и профессиональной деятельности. Генерация, прохождение и обработка сигналов в устройстве контроля аналогична выше рассмотренному контролю характеристики скорости адаптации пилота. Для определения скорости самообучаемости пилота процедуру тестирования необходимо провести на двух временных интервалах Т и 2Т соответственно. Количественно определить скорость самообучаемости индивидуума можно из выраженияJ h,()-hT.() dl /Tb t-O-h tCOldT где V - скорость масообучаемости пилота;
т - временной интервал тестирования;
Нз(Т) -эталонная импульсная переходная функция, характеризующая эталонное состояние пилота;
) - импульсная переходная функция, характеризующая состояние пилота на временном интервале Т тестирования; h,(t) - импульсная переходная функция, характеризующая состояние пилота н.а временном интервале 2Т.
Блок эталонных импульсных переходных функций 16 содержит узел памяти, где они хранятся в цифровом коде, и узел управления, по командам которого извлекаются из узла памяти эталоны и подаются на вход блока сравнения 15.
Имитатор сигналов воздействий 5 дополнен модулятором, осуществляющим функ цию умножения щумового сигнала и сигнала программы деятельности оператора, поступающего с генератора шума 17 и программного блока 7 соответственно.
Изобретение позволяет контролировать не только характеристики кратновременной и оперативной памяти, внимания, скорости сенсомоторной реакции, которые достаточно полно характеризуют такой вид деятельности оператора, которая жестдо регламентирована, но и характеристики эвристической деятельности оператора: скорость адаптации и самообучаемости.Кроме того, предлагаемое изобретение позволяет исключить из процессов контроля экспериментатора,что существенно сокращает временные издержки на постановку тестирующих задач испытуемому оператору.
Использование изобретения позволит повысить эффективность тренажа. Формула изобретения Тренажер оператора, содержащий блок моделирования объекта тренажа, первые
вход и выход которого соединены соответственно С первыми входом и выходом имитатора сигналов воздействия, второй выход через индикатор соединен с блоком формирования сигналов, второй вход которого связан с первым выходом блока ручного управления, подключенного вторым выходом к второму входу блока моделирования объекта тренажа, выходы блока формирования сигналов соединены, соответственно, с первым входом блока сравнения и входом программного блока, первый выход которого связан со вторым входом блока сравнения, а второй его выход подключен к второму входу имитатора сигналов воздействия, связанного вторым выходом с третьим входом блока формирования сигналов, причем выходы блока сравнения связаны со входами блока регистрации и отображения информации, отличающийся тем, что, с целью повыщения эффективности тренажа, он имеет дополнительный блок сравнения, блок принятия рещений,
вычислительный блок, блок эталонных импульсных переходных функций и генератор щума, выход которого подключен к третьему входу имитатора сигналов воздействия, второй выход блока моделирования объекта тренажа дополнительно через последовательно соединенные вычислительный блок, дополнительный блок сравнения подключен к входу блока принятия рещений, выход которого свйзан с информационным входом блока регистрации отображения информации, приQ чем управляющий вход дополнительного блока сравнения подключен к выходу блока эталонных импульсных переходных функций, а информационный вход вычислительного блока подключен к третьему входу блока ручного управления.
Источники информации, принятые во внимание при экспертизе
Cv
18
Z4
/9
го
Z3
i
It
Фие.2
