Изобретение относится к тренаже рам операторов систем управления и может быть использовано при обучении операторов систем управления.
Известен тренажер операторов систем управления, содержащий блок моделирования объекта тренажа, соединенный непосредственно и через имитатор сигналов воздействия с программным блоком, блоком ручного управления, вычислительным блоком, сумматором, подключенным через индикатор с формирователем сигналов и вычислительным блоком, соединенным с блоком принятия решения и отображения информации,- связанным через блок регистрации и сравнения информации с формирователем сигналов и программным блоком, узел генерации, и преобразования шумового сигнала, соединенный с имитатором сигналов воздействия и блоком принятия решения и отображения информации, и имитатор фоновых помех Ij .
Недостатком известного тренажера является невысокая эффективность тренажа.
Целью изобретения является повышение эффективности, тренажа.
Поставленная цель достигается тем, что тренажер операторов систем управления, содержащий блок моделирования объекта тренажа, соединенны непосредственно и через имитатор сигналов воздействия с программным блоком, блоком ручного управления, вычислительным блоком, сумматором, подключенным через индикатор с формирователем сигналов и вычислительным блоком, соединенным с блоком принятия решения и отображения информации, связанным через блок регистрации и сравнения информации с формирователем сигналов и программным блоком, узел генерации и преобразования шумового сигнала, соединенный с имитатором сигналов воздействия и блоком принятия решения и / отображения информации, и имитатор фоновых помех, имеет узел формируго1ИИХ фильтров, коммутатор и дешифратор команд, вход которого подключен к управляющему выходу программного блока, а выход соединен с первым входом коммутатора, второй вход которого связан с выходом имитатора фоновых помех, а выход через узел формирующих фильтров подключен к информационному входу сумматора.
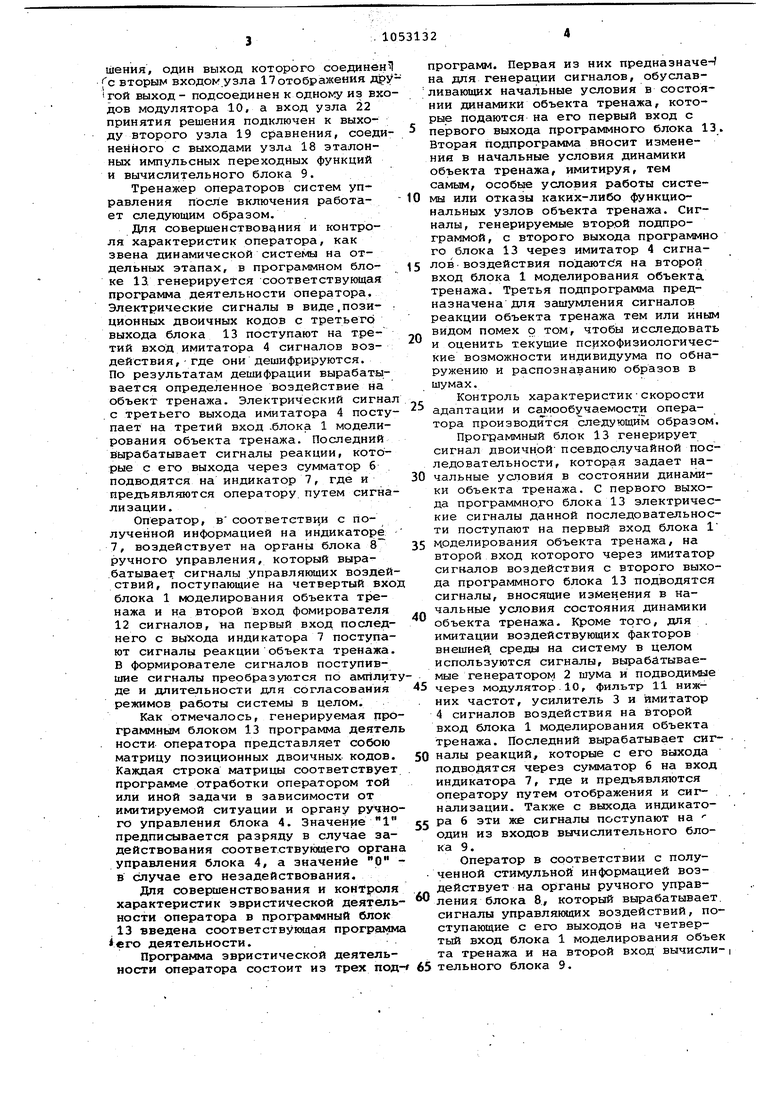
На чертеже представлена блок-схема тренажера операторов систем упра ления.
Тренажер операторов систем управления содержит блок 1 моделирования объекта тренажа, генератор 2 шума, усилитель 3, имитатор 4 сигналов воздействия, имитатор 5 фоновых помех, сумматор 6, индикатор 7, бло 8 ручного управления, вычислительный блок 9, модулятор 10, фильтр 11 нижних частот, формирователь 12 сигналов, программный блок 13, узел 14 сравнения, дешифратор 15, узел 16 памяти, узел 17 отображения информации, узел 18 эталонных импульсных переходных функций, узел 19 сравнения, узел 20 сопряжения, узел 21 реги страции информации, узел 22 принятия решения, узел 23 формирующих
.фильтров, коммутатор 24 и дешифратор 25 команд.
Узел генерации и преобразования шумового сигнала содержит генератор
2шума, усилитель 3, модулятор 10 и фильтр 11 нижних частот. Блок принятия решения и отображения информации включает в себя узел 17 отобра жения информации, узел 18 эталонных импульсных переходных функций, узел
19 сравнения и узел 22 принятия решения. Блок регистрации и сравнения информации состоит из узла 14 сравнения, дешифратора 15, узла 16 памяти, узла 20 сопряжения и узла 21 регистрации информации.
При этом первый вход блока 1
подключен к первому выходу программного блока 13, второй и третий входы через имитатор 4 сигналов воздействия подсоединены соответственно к .второму и третьему выходу программного блока 13, .а четвертый вход - подключен к первому выходу блока 8 ручного управления и первЪму входу вычислительного блока 9,
при этом выход блока 1 моделирования объекта тренажа электрически связан с одним из входов сумматора 6, другой вход которого подключен через узел 23 формирующих фильтров к выходу коммутатора 24, а выход сумматора 6 через индикатор 7, соответственно, подсоединен к первому входу формирователя 12 сигналов и второму входу вычислительного блока 9; причем формирователь 12 сигналов соединен
вторым входом с выходом блока 8 ручного управления, а выходом - с одним из входов первого узла 14 сравнения, другой вход которого подсоединен к четвертому выходу программного блока 13, генератор 2 шума, подключенный через модулятор 10, фильтр 11 нижних частот и усилитель
3к третьему входу имитатора 4 сигна лов воздействия, дешифратор 2 команд, вход которого соединен с пятым выходом программного блока 13, а выход - с одним из входов коммутатора 24, другой вход последнего подсоединен к выходу имитатора
5 фоновых помех, узел 17 отображения соединен через 16 памяти и дешифратор 15 с первым- выходом узла 14 сравнения, узел регистрации 21 подключен через узел 20 сопряжения к второму выходу первого узла
4 сравнения, узел 22 принятия решения, один выход которого соединен fc вторым входом узла 17 отображения другой выход- подсоединен к одному из входов модулятора 10, а вход узла 22 принятия решения подключен к выходу второго узла 19 сравнения, соединенного с выходами узла 18 эталонных импульсных переходных функций и вычислительного блока 9.
Тренажер операторов систем управления после включения работает следующим образом. .
Для совершенствования и контроля характеристик оператора, как звена динамической системы на отдельных этапах, в программном блоке 13. генерируется соответствующая программа деятельности оператора. Электрические сигналы в виде.пози- ционных двоичных кодов с третьего выхода блока 13 поступают на третий вход имитатора 4 сигналов воздействия, где они дешифрируются. По результатам дешифрации вырабатывается определенное воздействие на объект тренажа. Электрический сигнал .с третьего выхода имитатора 4 поступает на третий вход -блока 1 моделирования объекта тренажа. Последний вырабатывает сигналы реакции, которые с его выхода через сумматор 6 подводятся на индикатор 7, где и предъявляются оператору, путем сигнализации.
Оператор, в соответств и с полученной информацией на индикаторе 7, воздействует на органы блока 8 ручного управления, который выра.батывает сигналы управляющих воздействий, поступающие на четвертый вход блока 1 моделирования объекта тренажа и на второй вход фомирователя
12сигналов, на первый вход последнего с выхода индикатора 7 поступают сигналы реакции объекта тренажа. В формирователе сигналов поступившие сигналы преобразуются по амйлитуде и длительности для согласования режимов работы системы в целом.
Как отмечалось, генерируемая программным блоком 13 программа деятель ности оператора представляет собою матрицу позиционных двоичных кодов. Каждая строка матрицы соответствует программе отработки оператором той или иной задачи в зависимости от имитируемой ситуации и органу ручного управления блока 4. Значение 1 предписывается разряду в случае задействования соответствукицего органа управления блока 4, а значение О в случае его незадействования.
Для совершенствования и контроля характеристик эвристической деятельности оператора в программный блок
13введена соответствующая программа его деятельности.
Программа эвристической деятельности оператора состоит из трех подпрограмм. Первая из них предназначен на для генерации сигналов, обуславливающих начальные условия в состоянии динамики объекта тренажа, которые подаются на его первый вход с
первого выхода программного блока 13. Вторая подпрограмма вносит изменения в начальные условия динамики объекта тренажа, имитируя, тем самым, особые условия работы систе0 мы или отказы каких-либо функциональных узлов объекта тренажа. Сигналы, генерируемые второй подпрограммой, с второго выхода программно го блока 13 через имитатор 4 сигна5 лов-воздействия подаются на второй вход блока 1 моделирования объекта тренажа. Третья подпрограмма предназначена для зашумления сигналов реакции объекта тренажа тем или иным видом помех о том, чтобы исследовать
0 и оценить текущие психофизиологичес кие возможности индивидуума по обнаружению и распознаванию образов в шумах.
Контроль характеристик-скорости
адаптации и самообучаемости оператора производй тся следующим образом.
Программный блок 13 генерирует сигнал двоичной псевдослучайной последовательности, которая задает на0 чальные условия в состоянии динамики объекта тренажа. С первого выхода программного блока 13 электрические сигналы данной последовательности поступают на первый вход блока 1
5 моделирования объекта тренажа, на второй вход которого через имитатор сигналов воздействия с второго выхода программного блока 13 подводятся сигналы, вносящие изменения в начальные условия состояния динамики
0 объекта тренажа. Кроме того, для . имитации воздействующих факторов внешней, среды на систему в целом используются сигналы, вырабатываемые генератором 2 шума и подводимые
5 через модулятор 10, фильтр 11 ниж . них частот, усилитель 3 и имитатор 4 сигналов воздействия на второй вход блока 1 моделирования объекта тренажа. Последний вырабатывает сиг- 0 налы реакций, которые с его выхода подводятся через сумматор 6 на вход индикатора 7, где и предъявляются оператору путем отображения и сигнализации. Также с выхода индикато5 ра 6 эти тк сигналы поступают на - один из входов вычислительного блока 9,.
Оператор в соответствии с полу ченной стимульной информацией воздействует на органы ручного управ ления блока 8,, который вырабатывает, сигналы управляющих воздействий, поступающие с его выходов на четвертый вход блока 1 моделирования объек та тренажа и на второй вход вычисли-i
5 тельного блока 9. Поступившие с индикатора 7 и бл ка 8 ручного управления на входы вычислительного блока 9 сигналы . являются основой для определения .т куЩегчэ состояния управляющих дейс вий операт9ра, которое в блоке 9 оценивается по аналитическому соот ношению bT(t) (t-t),, .где ) - импульсная переходная функция, усредненная во времени и характер зующая текущее состоян управляющих действий оператора/ X-t(t) - реакции оператор.а на стимульные сигналы, снимаемые с выхода бл ка 8 ручного управле ния; ;-t) - стимульные сигнатш,вы симые на индикатор 7, временные задержки. Сигнал, представляющий собой произведение стимульного сигнала t|() и реакции оператора , с выхода вычислительного блока 9 п тупает на первый вход второго узла 19 сравнения, .на другой вход которого с выхода узла 18 эталонных импульсных переходных функций также поступает эталонный сигнал, представляющий собою произведение стимульного сигнала lj(t-) и сигнала X g (t) в реакции этаЛонного оператора СигТТал разности текущего .сигнала Ь ) и эталонного h (tt) ( X3it.)j( 7 bitlyU-). с выхода узла 19 поступает на вход узла 22, в котором по величине &i выносится решение о соответствии текущего состояния управляющих действий индивидуума - требуемому,, а р зультат решения узлом 22 отображает ся узлом 17. Генерация, прохождение и обработ ка сигналов в тренажере для со-. вершенствования и контроля хара1 -теристики скорости адаптации и самообучаемости оператора аналогична рассмотренной методике по оценке его текущего состояния управляющих действий. Для определения характеристи скор-ости адаптации и самообучаемост процедуру тестирования необходимо провести на двух временных ии.тервалах, используя подпрограммы эвристи ческой деятельности оператора. Количественно определяется скорость адаптации (самообучаемости) оператора по формуле itb,uvb,( ,(tvb, где V - скорость адаптации самообучае-Л мости оператора, Т,2т временные интерва лы тестирования I, л оператора, - эталонная импульс ная переходная функция; Ьт(,2) jH-j (ь) - импульсные переходные функции, харакIтеризующие текущее состояние управляющих действий оператора на временных . интервалах Т 2Т соответственно. Если текущая скорость адаптации оператора меньше требуемой, которая определяется величиной . bV V,p-V, где дV - величина несоответствия текущей скорости адаптации индивидуума -.требуемой; тр -требуемая величина скорости адаптации оператора; VT - фактическая величина скорости адаптации оператора, то сигнал величиной uV подается на один из ВХОДОВ модулятора 10, вследствие чего результирующий сигнал, представляющий собой произведение сигналоа возмущающей среды и сигнала uV , на выходе имитатора 4 сигналов во здействИя соответствует требуе мому уровню воздействующих факторов среда на систему. Для исследования и оценки психофизиологических возможностей оператора по обнаружению и распознаванию образов в шумах используется третья подпрограмма, с помощью которой программным блоком 13 генерируют ся командные сигналы на згциумление сигналов реакции объекта тренажа . конкретного вида помехой, поступающей с его пятого выхода через дешифратор 25 команд на один из входов коммутатора 24, на другой вход которого подводятся сигналы с выхода имитатора 5 фоновых помех. В коммутаторе 24 осуществляется выбор конкретного вида помехового сигнала в соответствии кода командного сигнала, С выхода коммутатора 24 помеховый сигнал поступает на вход узла формирующих фильтров 23, назначение которого состоит в формировании параметров помехового сигнала по величине интенсивности и частотного диапазона. Сформированные по величине интенсивности и частотному диапаэону помеховый сигнал с выхода узла 23 формирующих фильтров подается на один из входов сумматора б, на дру1Ч}й вход которого поступает , сигнал, реакций объекта тренажа. Зашумленный сигнал помехой с выхода
сумматора 6 подводится на индикатор,, где он визуализируется; на экране дисплея (индикатор 7). Оператор, в соответствии с полученной информацией на экране дисплея, должен на фо не конкретного вида помехи распознать образ (сигнал реакций объекта Т1Ьенажа) и с помощью органов ручного управления блока 8 реализовать .его.Одновре1«юнно сигналы с выходов ; индикатора 7 и блока 8 ручного управ-.
пения поступают на первый и второй, входы вычислительного блока 9, а также на четвёртый вход блока 1 моделирования объекта тренажа. По поступившим на входы вычислительного блока 9 сигналам производится оценка психофизиологических возможностей оператора обнаруживать и распознавать образы.
Использование изобретения повышает эффективность тренажа.


| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивный тренажер оператора | 1982 |
|
SU1086451A2 |
| Адаптивный тренажер оператора | 1982 |
|
SU1029215A2 |
| Тренажер оператора | 1984 |
|
SU1174960A2 |
| Адаптивный комплекс для обучения операторов систем управления | 1982 |
|
SU1003131A1 |
| Тренажер оператора | 1981 |
|
SU959136A1 |
| Устройство обучения операторов систем управления | 1983 |
|
SU1211792A1 |
| Адаптивное устройство обучения операторов | 1983 |
|
SU1138822A1 |
| Устройство обучения операторов систем управления | 1983 |
|
SU1121695A1 |
| Тренажер оператора | 1983 |
|
SU1098024A1 |
| Тренажер оператора | 1983 |
|
SU1191930A2 |
ТРЕНАЖЕР ОПЕРАТОРОВ СИСТЕМ УПРАВЛЕНИЯ, содержащий блок моделирования объекта тренажа, соединенный непосредственно и через ими татбр сигналов воздействия с программным блоком; блоком ручного управления, вычислительным блоком, сумматором, подключенным через индйкйтор с. формирователем сигналов и вычислительнь блоком, соединенным с блоком принятия решения и отображения информации, связанным черёз| блок регистрации и сравнения информации с формирователем сигналов и программным блоком, узел генерации и .преобразования шумового сигнала, соединенный с имитатором сигналов воздействия: и блоком принятия решения и отображения информации, и имитатор фоновых помех, о т л йч а to щ и и с я тем, что, с целью повышения эффективности тренажа, он имеет узел формирующих фильтров, коммутатор И дешифратор команд, вход которого подключен к управляющему вы ходу программного блока, а выход . соединен с первым входом коммутатора, второй Вход которого связан с и выходом имитатора фоновых помех, а СО выход через узел формирующих, фильтров подключен к информационному с входу сумматора.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР по заявке № 3380193, 05.01.82. | |||
