Изобретение относится к электротехнике, в частности к электроприводам и системам автоматического управления, и может быть использовано в электроприводах с широким диапазоном регулирования частоты вращения и я зляется усовершенствованием технического решения поавт.св. № 1713072.
Известен вентильный электропривод по авт.св. Me 1713072, кл. Н 02 Р 6/02, 1988, содержащий двухфазную синхронную машину, первый и второй блоки умножения, первые входы которых объединены, а выходы через усилители мощности подключены соответственно к синусной и косинусной фазам обмотки якоря синхронной машины, датчик положения ротора, установленный на валу ротора синхронной машины,.синус-. ная и косинусная выходные обмотки которого подключены через первый и второй фазочувствитольные выпрямители ко вторым входам соответственно первого и второго блоков умножения, источник напряжения, выход которого подключен к обмотке возбуждения датчика положения
ротора и через формирователь опорного напряжения к опорным входам фазочувстви- тельных выпрямителей, задатчик частоты вращения, выход которого подключен к первому входу блока сравнения, второй вход которого подключен к выходу датчика частоты вращения., а выход подключен через предварительный усилитель к первым входам первого и второго блоков умножения, выходы первого и второго фазочувствитель- ных выпрямителей подключены к первому и второму входам датчика частоты вращения, составленного из двух алгебраических сумматоров, первого и второго блоков умноже- ния, выходы которых подключены к соответствующим входам первого алгебраического сумматора, а также первого и второго апериодических звеньев, третьего и четвертого блоков умножения и блока целения, входы делимого и делителя которого подключены соответственно к выходам первого и второго алгебраических сумматоров, а выход образует выход датчика частоты вращения, причем выход первого апериодиел
с
XI
Ю
чэ ел со
ю
ческого звена подключен к первым входам первого и третьего блоков умножения датчика частоты вращения, а вход Соединен со вторыми входами третьего и.второго блоков умножения и образует первый вход датчика частоты вращения, выход второго апериодического звена подключен к первым входам второго и четвертого блоков умножения датчика частоты вЬраЩёния, а вход соединен со вторыми входами первого и четвертого блоков умножения и образует второй вход датчика частоты вращения, выходы третьего и четвертого блоков умножения подключены соответственно к первому и второму входам второго алгебраического сумматора,
Недостатками такого вентильного электропривода являются:
- сложность конструкции, содержащей узлы, обеспечивающие взаимный разворот статоров датчика положения и синхронной машины, что обусловлено необходимость его настройки в процессе изготовления, заключающейся в развороте статора датчика положения относительно статора синхронной машины и фиксации углового положения статора датчика, соответствующего максимуму вращающего момента; - нелинейность регулировочных характеристик, обусловленная инерционностью усилителей мощности и фазочувствитель- ны х выпрямителей.
Целью изобретения является упрощение и увеличение точности регулирования частоты вращения путем повышения линейности регулировочных характеристик.
Для достижения поставленной цели вентильный электропривод содержит дополнительно два датчика тока, два блока вычисления ЭДС вращения, блок вычисления фазы, интегратор, суммматор, инвертор и третий блок умножения.
Сущность изобретения заключается в том, что фазовый сдвиг между минус ЭДС вращения и током в фазовых обмотках якоря синхронной машины, измеряемой с помощью блока вычисления, фазы, поддерживается равным нулю во всем диапазоне изменения скорости при произвольном взаимном расположении статоров синхронной машины и датчика положения ротора путем изменения напряжения возбуждения, подаваемого на квадратную обмотку датчика положения ротора, т.е. значение угла между магнитными потоками ротора синхронной машины и статора поддерживается оптимальным, равным 20 эл. трэд.;
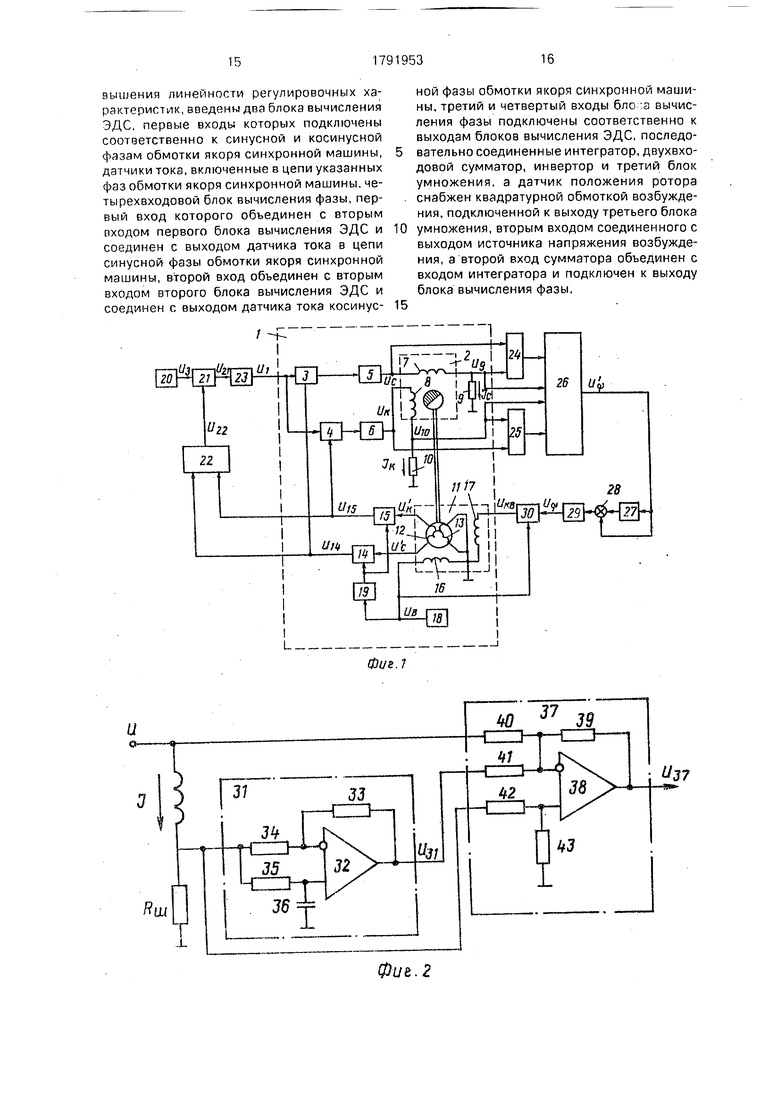
На фиг.1 изображена функциональная схема электропривода; на фиг.2 - функциональная-схема блока вычисления ЭДС вращения; на фиг.З - функциональная схема блока вычисления фазы; на фиг.4 - векторная диаграмма синхронной машины..
Вентильный электропривод содержит
вентильный двигатель 1, который включает в себя двухфазную синхронную машину 2, первый 3 и второй 4 блоки умножения, первые входы которых объединены. Выходы первого 3 и второго 4 блоков умножения
0 подключены через усилители 5, б мощности соответственно к синусной 7 и косинусной 8 фазам обмотки якоря синхронной машины 2, последовательно с которыми соединены первый 9 и второй 19 датчики тока. В состав
5 вентильного двигателя 1 входит также датчик 11 положения ротора, механически связанный с ротором синхронной машины 2, синусная 12 и косинусная 13 выходные обмотки которого подключены через первый
0 14 и второй 15 фазочувствительные выпрямители ко вторым входам первого 3 и второго 4 блоков умножения соответственно. Кроме того, датчик 11 положения ротора содержит основную 16 и квадратную 17 об5 мотки возбуждения. В состав вентильного двигателя 1 входит также источник 18 напряжения возбуждения, выход которого подключен к обмотке 16 возбуждения датчика 11 положения и через формирователь 19
0 опорного напряжения - к опорным входам фазочувствительных выпрямителей 14, 15. Электропривод содержит также задатчик 20 частоты вращения, выход которого соединен с первым входом блока 21 сравнения,
5 второй вход которого соединен с выходом датчика 22 частоты вращения, а выход через предварительный усилитель 23 - с первыми входами первого 3 и втрого 4 блоков умножения, выходы первого 14 и второго 15 фа0 зочувствительныхвыпрямителей подключены соответственно к первому и второму входам датчика 22 частоты вращения.
Кроме того, электропривод содержит
5 первый.24 и второй 25 блоки вычисления ЭДС вращения; блок 26 вычисления фазы, интегратор.27, сумматор 28, инвертор 29, третий блок 30 умножения. Первые входы первого 24 и второго 25 блоков вычисления
0 ЭДС вращения подключены соответственно к синусной 7 и косинусной 8 фазам обмотки якоря синхронной машины 2.
Первый вход блока 26 вычисления фазы объединен со вторым входом первого 24
5 блока вычисления ЭДС и соединен с выходом первого 9 датчика тока в цепи синусной 7 фазы обмотки якоря синхронной машины 2, второй вход объединен со вторым входом второго 25 блока вычисления ЭДС и соединен с выходом второго 10 датчика тока косинусной 10 фазы обмотки синхронной машины 2, третий и четвертый входы блока вычисления фазы подключены соответственно к выходам первого 24 и второго 25. блоков вычисления ЭДС. Выход блока 26 вычисления фазы через последовательно соединенные интегратор 27, сумматор 28, инвертор 29 и третий блок 30 умножения соединен с квадратурной обмоткой 17 датчика 11 положения ротора. Второй вход сумматора 28 соединен с входом интегратора 27, а второй вход третьего блока 30 умножения - с выходом источника 18 напряжения возбуждения.
Блоки 24 и 25 вычисления ЭДС вращения содержат, например, звено 31 фазового запаздывания (фиг.2), собранное на операционном усилителе 32 с резистором 33 в цепи обратной связи, входными резисторами 34, 35 и фазосдвигающим конденсатором . 36, который подключен к неинвертирующему входу операционного .усилителя 32, а также трехвходовый сумматор 37, собранный на операционном усилителе 38 с резистором 39 в цепи обратной связи и входными резисторами 40-43. Выход звена 31 фазового запаздывания соединен со вторым входом трехвходового сумматора 37, Первым входом блока 24 (25) вычисления ЭДС является первый.вход трехвходового сумматора 37, вторым входом - соединенные между собой в-ход звена фазового запаздывания и третий вход трехвходового сумматора 37.
Блок 26 вычисления фазы может быть выполнен, например, в виде первого 44, второго 45, третьего 46, и четвертого 47 блоков умножения (фиг.З), первого 48 и второго 49 алгебраических сумматоров и блока 50 деления, причем первый вход блока 26 вычисления фазы образует объединенные между собой первый вход второго и второй вход третьего 46 блоков умножения, второй вход блока 26 - первый вход четвёртого 47 и второй вход первого 44 блоков умножения, третий вход блока 26 - первые входы первого 44 и третьего 46 блоков умножения, а четвертый вход блока 26 - вторые входы второго 45 и четвертого 47 блоков умножения. Вход первого 44 и второго 45 блоков умножения подключены соответственно к первому и второму входам первого 48 алгебраического сумматора, а выходы третьего 46 и четвертого 47 блоков умножения - с первым и вторым входами второго 49 алгебраического сумматора, выход первого 48 и второго 49 алгебраических сумматоров подключены соответственно к входам делителя и делимого блока 50 деления. Выход блока
50 деления образует выход блока 26 вычисления фазы.
Датчик 22 частоты вращения реализован в соответствии со схемой, описанной в 5 авт.св. № 1713072.
Вентильный электропривод работает следующим образом.
На обмотку 16 возбуждения датчика 11 положения ротора с выхода источника 18 0 напряжения возбуждения подается переменное напряжение
ив U0sin2 ft,(1) где U0f - амплитуда и частота напряжения возбуждения; 5 t - время.
Одновременно на квадратную 17 обмотку возбуждения датчика 11 положения ротора подается напряжение, являющееся произведением напряжения UB источника 0 18 и напряжения U ijj(a) д), которые поступают на первый и второй выходы третьего блока 30 умножения:
. JKB(cai) (a)Jt}.s n27iti. (2) В соответствии с принципом работы 5 датчика 11 положения на выходных синусной 12 и косинусной 13 обмотках формируется синусоидальные напряжения 1СС и UK , модулированные по амплитуде соответственно синусом и косинусом электрического 0 угла Р(а д) поворота ротора датчика 11 положения, отсчитываемого от неподвижной оси отсчета q, связанного со статором датчика 11 (фиг,4). Таким образом: и с - 5.
-KgUoV )(,t)f sln m Wt+/3(W.t)
sin 2 Я ft
(3)
l/K-Kg-Uc
(u.t)f cos{mft/t+Ј(eu.t)
sin 2 л: ft,(4) где Kg - коэффициент передачи датчика 11 положения;
m - число пар полюсов синхронной машины 2;
су- частота вращения ротора двигателя;
Р(ы л) - угол фазового сдвига напряжения на выходных синусной 12 и косинусной 13 обмотках датчика 11 положения, вносимой напряжением икв(им),,поступаю- щим на его квадратурную 17 обмотку возбуждения, определяемый выражением:
J8(UJ,t) arctg-l 4ЈaI
UB
arctg lty/(wt). (5)
Напряжения Uc и UK поступают соответственно на первый 14 и второй 15 фазо- чувствительные выпрямители, на опорные входы которых подается напряжение прямоугольной формы с формирователя 19 опорного напряжения, полученное путем преобразования синусоидального напряжения, поступающего на его вход с источника 18 напряжения возбуждения. Следовательно, напряжения Ui4, Uis на выходе фазочув- ствительных выпрямителей 14 и 15 описываются уравнениями
.
О
KgW4 U0V7+rUtKw.O sln l mCOt+/((W;t)
.(6)
-2J + lty(w,t) cos m tot +0(u.t)
где Wcj - передаточная функция фазочувствительных выпрямителей;
С достаточной степенью точности переаточную функцию фазочувствительных выпрямителей 14 и 15 можно представить в виде передаточной функции апериодиче- ского звена первого порядка: Кф
МФ
1 + .Тф Р
(8)
где р -г- - символ дифференцирования;
Кф - коэффициент передачи фазочувст- вительного выпрямителя;
Тф - постоянная времени фазочувстви- тельного выпрямителя.
Таким образом, уравнения (6) и (7), описывающие напряжения на выходе фазочувствительных выпрямителей 14 и 15, представляются в виде
U14 - КдАф(о)Г1 -V( w , t)12 U0sin m Mt + -/(a,t)-$|((9)
Uis КдАф(ы)/Г .1р(ю$ Uocosfmtt) t + /3 (w t).- уф(а)), (10)
где Аф( (о) -----Ж---- - амплитудно 1 + ( m о) Тф )
частотная характеристика апериодического звена;
((а) arctg m - фазочувстви- тельная характеристика апериодического звена.
Напряжения Ui4. Uis поступают соот- ветст венно на первый и второй входы датчика 22 частоты вращения, а также на
вторые входы блоков 3, 4 умножения вентильного двигателя 1.
В соответствии с принципом работы датчика 22 частоты вращения, на его выходе формируется напряжение;
Uz2 mu)TB ,(11) где Кс тТв - коэффициент обратной связи по скорости;
Тв - постоянная времени апериодиче- ского звена датчика частоты вращения. i
Напряжение IJ22 с. выхода датчика 22 частоты вращения, пропорциональное частоте вращения ротора синхронной машины 2, поступает на блок 21 сравнения, в кото- ром сравнивается с напряжением U3 заданной частоты вращения вентильного двигателя, вырабатываемым задатчиком 20. Сигнал U21 ошибки с выхода блока 21 сравнения, усиленный предварительным усили- тёлем 23, поступает в виде напряжения постоянного тока на вход вентильного двигателя 1. Таким образом, напряжение на входе вентильного двигателя 1 равно:
Ui (U3-Kcft))Kn, (12) где U i - напряжение на входе вентильного двигателя;
Кп - коэффициент усиления предварительного усилителя 23. В блоках 3, 4 напряжение Ui умножает- ся соответственно на напряжения и Uts. поступающие с фазочувствительных выпрямителей 14, 15.
Передаточную функцию усилителей 5, 6 мощности можно представить в виде пере- даточной функции апериодического звена первого порядка с передаточным коэффициентом. Ку и постоянной времени Ту. Следова- тельно, напряжения, поступающие на синусную 7 и косинусную 8 фазы обмотки якоря синхронной машины 2, описываются уравнениями: .1)г Kn(Ua - Кс (о )КнАф( О) )АУ( ш )У1 + U (w, UoSin m«t+P (w,t) - Ш -Ш1:.. ПЗ)
UK Kn(U3 -Кс ф)КнАф(би) + и (t)f U0 t +S(et) -ty$ -Г(4, (14)
где Км - коэффициент передачи блоков умножения;
К Ау (о) - амплитуд1 + ( m ш Тф )
но-частотнзя характеристика усилителей 5, 6 мощности;
т/ Ф (w) arctg m ш Ту - фазочастот- ная характеристика усилителей 5, 6 мощно- сти.
Под действием этих напряжений в синусной 7 и косинусной 8 фазах обмотки якоря протекают токи:
1с Г3 sin mftJt+/(w, t) l((i)} - la)sin Г m (oi -f- В(О), t ) -tWсо} -
-lEstn mft t + (90°-0)-V(w);(15) IK I3 cos m wt+/(«. t) ) - co cos (ftJ,t)- $((y)- IE + (90°0)-(yj, (16)
ся, т.е. угол t/;(ft),t.) между ними равен нулю. Следовательно, с учетом (21) получим:
V(«,t)5-ei() Cf-0) + + $ft) + y(fl)-/8(G,t) 0,(23)
JT
где тт - G - ml- представляет собой угол

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ настройки моментного вентильного электродвигателя | 1987 |
|
SU1495944A1 |
| Вентильный электропривод | 1989 |
|
SU1676053A1 |
| Вентильный электропривод | 1988 |
|
SU1713072A1 |
| Вентильный электропривод | 1987 |
|
SU1480084A1 |
| Вентильный электропривод | 1988 |
|
SU1510060A1 |
| Реверсивный вентильный электродвигатель | 1983 |
|
SU1153381A1 |
| Вентильный электропривод | 1988 |
|
SU1654960A1 |
| Вентильный электродвигатель | 1990 |
|
SU1750016A1 |
| Вентильный электропривод | 1987 |
|
SU1635243A1 |
| Реверсивный вентильный электродвигатель | 1985 |
|
SU1297186A1 |

Использование: в электроприводе с широким диапазоном регулирования частоты. Сущность: фазовый сдвиг между ЭДС вращения и током в синусной и косинусной фазах обмотки якоря синхронной машины, измеряемый блоком вычисления фазы, поддерживается равным нулю во всем диапазоне изменения скорости при произвольном положении статора синхронной машины и датчика положения ротора. Поддержание указанного фазового сдвига равным нулю осуществляется изменением напряжения возбуждения, подаваемого на квадратную отмотку датчика положения ротора. В результате повышается точность рёгулиррва- ния частоты вращения. 4 ил.
где
ls
,()
КпКниоизАф(й)/5у(«)Ая(ш)У1 (fi).t)
(17) I КПК„ КсШ Uo -
,&Аф(й)Ay (a)) Ая (ft))3
(18)
1е-КеАя(У) (19) )()+Vy(uO-fVb(u). (20)
АЯ(У) --------2 -амплитуд1 +(тй)Тя) но-частотная характеристика фазы обмотки якоря;
я (ft)) arctgmcuTfl - фазочастотная характеристика фазы обмотки якоря;
Ря, Тя - сопротивление и электромаг- нит ная и электромагнитная постоянная фа- зы обмотки якоря;
Ке - конструктивный коэффициент синхронной машины 2;
G - угол между неподвижной осью от- счета, связанной со статором датчика 11 положения и вектором магнитного потока или МДС ротора синхронной машины 2.
Графическим изображением уравнения (15) является векторная диаграмма представленная на фиг.4.
Из уравнений (15) и (16)и векторной диаграммы следует, что угол Ф0 между вектором магнитного потока ротора Е(Ш) и вектором тока статора Ст или, что то же самое, между магнитным потоком статора и магнитным потоком Фо ротора равен eiO,t)(w.t)-VbO)-У.(а), : (21
г.це y(fi) - угол между векторами токов 3
и Тст.
Из теории известно, что вентильный электропривод настроен оптимально, если угол Ј(о) t) между векторами магнитного
потока Ф0 ротора и статора Ф0 равен.; «
т.е.
ei ((о, t) 0+/(o).t)-Vfa.(-y((22)
Анализ векторной диаграммы (фиг.4) показывает, что при выполнении условия (22) вектор ст тока фазы обмотки статора и вектор минус Ео ЭДС вращения совмещаютмежду осью и вектором минус Е0 ЭДС вращения и определяется угловой ошибкой L взаимной установки статора датчика 11 положения и статора синхронной машины 2 при сборке.
Из уравнения (23) следует, что вентильный электропривод обладает оптимальными характеристиками, если угол /5(о) фазового сдвига, вносимого наприяжением Окв, поступающим на квадратурную 17 обмотку возбуждения датчика 11 положения, равен /3(w,tj mL + ((w)+y(u). (24)
Выполнение условия (24) обеспечивается контуром регулирования фазы /(w) t, состоящим из датчика 11 положения ротора, фазочувствительных выпрямителей 14 и 15, умножителей 3, 4 напряжения, усилителей 5, 6 мощности, синхронной машины 2, датчиков тока 9, 10, блоков 24, 25 вычисления ЭДС вращения, блока 26 вычисления фазы, интегратора 27, сумматора 28, инвертора 29 и блока 30 умножения, путем изменения напряжения Окв (о) t). Необходимая величина напряжения UKB( (t) t) формируется с помощью двух блоков 24 и 25 вычисления ЭДС вращения, .блока 26 вычисления фазы, интегратора 27, сумматора 28, интегратора 29 и блока 30 умножения.
Формирование напряжения UKB( м t) происходит следующим образом.
На первые входы блоков 24 и 25 поступают соответственно напряжения Uc, UK с выходов усилителей 5, 6 мощности, а на их вторые входы поступают соответственно напряжения Ug, ию,пропорциональные токам в фазах обмотки статора.
и9 Рш1с:. (25)
Uio-RujU,(26) где Яш - сопротивление датчиков 9, 10 тока.
Блоки 24, 25 вычисления ЭДС вращения реализует известную в теории электрических машин зависимость:
E0 -U + IRfl + jlu La,(27) где U, I, Ео - соответственно напряжение на обмотке статора, ток, протекаемый в обмотке и ЭДС вращения.
Простейшая схема устройства, проводящего вычисления в соответствии с уравнением (27), приведена на фиг.2. Напряжение U31 на выходе фазозапаздывающего звена 31 отстает от тока на 90 эл, градусов и равно
U3i -jRiiil.(28) Напряжение Уз7 на выходе трехвходо- вого сумматора 37 равно
II R39 i | 1 | R38 D ,
U3n u+JRZTRluJ
+ R| RujJ
(29)
Сравнивая между собой уравнения (27) и (28) нетрудно установить, что если принято
R39
1,
R39
R39
то
R40 R, Ря . U46 Ео..
Таким образом, на.выходах блоков 24, 25 формируются напряжения U24. U25, пропорциональные соответственно ЭДС вращения в синусной 7 и косинусной 8 фазах обмотки статора. Эти напряжения описываются выражениями:
U24 KeEoSlnmwt;(30)
U25 KeE0cosm on;(31) где Ке - коэффициент пропорциональности.
Эти напряжения поступают соответственно на третий и четвертый входы блока 26 вычисления фазы. На первый и второй входы этого блока поступают соответственно напряжения с датчиков 9, 10 тока, описываемые в соответствий с векторной диаграм- . мой (фиг.4) уравнениями
U9 RujlaSin m d)i- tp(a)}
Uio (cot), } (32) где ia mod() - le) - амплитудное ; значение тока в фазе.
Блок 26 вычисляет тангенс между ЭДС фазы обмотки якоря и током, протекающим в обмотке, следующим образом.
Под действием напряжений, поступающих на вход блока 26 вычисления фазы, на выходе блоков 44-47 умножения формируются напряжения:
U44 KHU24U10 | KHKeEoRiula{-sin
ф((а t) + sin 2man- tp (o)i t)};
t)45 KHU25Ug Ј KHKeE0Rujla{sln
V ( w t) + s I mw t - гр ( ш} t);
U46 KHU24Ug 1 КнКеЕоРш1а{соЗ
V (о) t) - t - V( w t)k
KnKeEoRuila{cos (33)
U47 KHU25U10
ф (a) t) + m ft) t - V; (% г)}«
где КИ - коэффициент передачи блоков 44- 47 умножения.
Напряжения 1)44 и 1М5Тюступают на входы алгебраического сумматора 48, с выхода которого разность этих напряжений поступает на вход делимого блока 50 деления. Напряжения U-qe и U-17 поступают на входы алгебраического сумматора 49, с выхода ког.
10
15
20
25
30
35
40
45
50
торого сумма этих напряжений поступает на вход делителя блока 50 деления. Таким образом, на выходе блока 26 вычисления фазы формируется напряжением
II / Ul5 U W - Sfn t/j(uJ, t ) + U47 С03(й),г).
tgv (w,t)(34) Напряжение через последовательно соединенные интегратор 27, сумматор 28, инвертор 29, третий 30 блок умножения поступает на квадратурную 17 обмотку возбуждения датчика 11 положения. Следовательно, напряжение 1)Кв, поступающее на квадратурную обмотку, описывается выражением; у
UKB(ш t) - -Uotl/V (w) + / UV (a, t) sin27r ft.(35)
Таким образом, напряжение UKB определяется величиной угла t/;(uJt) между вектором тока 1ст статора и вектором минус Ео ЭДС вращения.
Это напряжение осуществляет сдвиг по фазе огибающей выходных напряжений Uc и UK датчика 11 положения ротора. Угол вносимого фазового сдвига определяется уравнением (5). После подстановки в него уравнений (34) и (35) получим:
(u}, t) arctg tgv(Q,t)+ .
+ JtgV(w,t).. (36)
Уравнения (20), (23) и (36) составляют систему уравнений:
V(o,t) mL + u)+y(uO-/J(u,t)0 i/( ш) V- Ф (w) + V-V ((°) + я ( У ); г /5(G,t) arctg tgv(ft.t)+ J
55
+ 7tgV(w,t).(37) которая описывается работу контура регулирования фазы между вектором тока ICT статора и вектором минус Е0 ЭДС вращения.
Анализ системы (37) показывает, что угол 1р(ш,.} является нелинейной функцией времени и, следовательно, не может быть определен в аналитическом виде. Дальнейший анализ работы контура регулирования фазы можно провести, рассматривая систему уравнения (37) в области малых значений угла i/(a,t) , при которых справедливо соотношение;
tg V(«.t) t/;(w,t)(38)
С учетом (38) система уравнений (37) преобразуется к виду:
.V(oM) (o)-/(u,t);. Т
j8(a),t)V(u,t) + .t)J (39) где я(л; mL-НД +у((а). (40J
Решение системы уравнений (39) устанавливает функциональную зависимость угла1/(о, t) от частота ш вращения ротора синхронной машины 2 и времени t
2V(W,t)+J(fi,t)#(u). (41)
Анализ уравнения (41) показывает, что. для его решения следует иметь функциональную зависимость о) - f(t).
Рассмотрим работу контура регулирования фазы, когда в вентильном электроприводе задается постоянная частота вращения, равная (а лъ . В этом случае уравнение (41) преобразуется к виду
.,г )Ј(%) (42)
Решением уравнения (42) является уравнение:
(ftJb,t)(ftfe), (43)
где Ј(Wo)mL+.(ftb)+y(fi). С44)
Анализ решения уравнения (42) показывает, что фазовый сдвиг между вектором тока статора двигателя Ст и вектором минус Ео ЭДС вращения будет изменяться по экс- потенциальному закону от начального значения () , определяемого частотой отвращения ротора синхронной машины 2 и угловой ошибкой L уменьшалась до нуля. Следовательно, в установившемся режиме при произвольных .постоянных частотах вращения (a const контур регулирования фазы поддерживает нулевое значение угла i/(a,t) , инвариантное угловой ошибке L и, таким образом, выполняется условие (22) оптимальной настройки вентильного привода, при котором угол е0 (ft), t) между векторами магнитных потоков статора Фс и ротора Фс равен 90 эл. градусов.
Если угол между векторами магнитных
потоков статора Фс и ротора Фс равен ,
то в соответствии с принципом действия вентильного привода, токи (с и к образуют в расточке статора вращающее магнитное поле, в результате взаимодействия которого с магнитным полем ротора возникает вра- щающий момент, пропорциональный амплитуде токов 1С и к, протекающих в синусной 7 и косинусной 8 фазах якорной обмотки синхронной машины 2, а ротор вращается со скоростью, пропорциональной амплитуде напряжений, прикладываемых к секциям якорных обмоток.
В результате, в соответствии с выражениями (13) и (14), связь между скоростью и амплитудой напряжений, прикладываемых к фазам якорной обмотки синхронной машины 2)описывается уравнением:
о,----------.
„ 4-КЕ П+()1 +()
f
(W,t)
(45) . где К КпКнКфКуи0;
(y,t) ml + arctgmcoly + arctgmw Тф + arctgm ft)Tfl.
Так как коэффициент К 1105, а произведение
Ке„ 1 +() И1-+() 1 , 1 +|tgV(w,t)
при любых частотах вращения ротора и со- отношениях параметров электропривода, слагаемое
22 Ке 1 +(mfc)Ty) 1 +()
(w,t)
и им можно пренебречь. Регулировочная характеристика вентильного привода в этом случае линейна и описывается уравнением
« иэ. (46) .
; Механическая характеристика вентильного привода с учетом выражений (17)-(19) описывается уравнением
М-Км (J3+Jw-Je) КмК
«Кс,
(u.t)
22 2 1 +() 1 + mft)Ty) 1 +(rnW)Tfl)
. ( Кс ЛЕ 1+(){1 + ()} 1 ((U.t)
1
R
(ft).t)
222 1 Ч-(тШТф) 1 +mtt)Ty) 1 +(m(t) Тя)
(Ua-KcO)).(47)
Нелинейность механической характеристики (w) f (M) обуславливается подкоренным выражением уравнения (47) и не превышает 10% при скорости двигателя, равной скорости холостого хода.
Таким образом, вентильный электропривод позволяет увеличить точность регулирования частоты вращения за счет повышения линейности регулировочных характеристик и упростить конструкцию привода, исключив .из нее узлы, обеспечивающие разворот и точную взаимную установку статора синхронной машины и статора датчика положения ротора при сборке и настройке привода,
Формула изобретения
Вентильный электропривод по авт.св. N 1713072, отличающийся тем, что, с целью упрощения и увеличения точности регулирования частоты вращения путем поэышения линейности регулировочных характеристик, введены два блока вычисления ЭДС, первые входы которых подключены соответственно к синусной и косинусной фазам обмотки якоря синхронной машины, датчики тока, включенные в цепи указанных фаз обмотки якоря синхронной машины, че- тырехвходовой блок вычисления фазы, первый вход которого объединен с вторым входом первого блока вычисления ЭДС и соединен с выходом датчика тока в цепи синусной фазы обмотки якоря синхронной машины, второй вход объединен с вторым входом второго блока вычисления ЭДС и соединен с выходом датчика тока косинусt
0
5
ной фазы обмотки якоря синхронной машины, третий и четвертый входы блока вычисления фазы подключены соответственно к выходам блоков вычисления ЭДС. последовательно соединенные интегратор, двухвхо- довой сумматор, инвертор и третий блок умножения, а датчик положения ротора снабжен квадратурной обмоткой возбуждения, подключенной к выходу третьего блока умножения, вторым входом соединенного с выходом источника напряжения возбуждения, а второй вход сумматора объединен с входом интегратора и подключен к выходу блока вычисления фазы.
Фив. г
| Авторское свидетельство СССР , № 1713072, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
