(54) УСТРОЙСТВО ДЛЯ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для интервального регулирования движения поездов | 1988 |
|
SU1687492A1 |
| Способ контроля состояния рельсовой линии и система интервального регулирования движения поездов на перегоне | 2021 |
|
RU2766015C1 |
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ | 2012 |
|
RU2513883C1 |
| Способ и система децентрализованного интервального регулирования движения поездов | 2017 |
|
RU2664023C1 |
| Способ интервального регулирования движения поездов | 2024 |
|
RU2832521C1 |
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ | 2013 |
|
RU2536299C1 |
| Система интервального регулирования движения поездов на базе радиоканала | 2018 |
|
RU2685109C1 |
| Система интервального регулирования движения поездов | 2021 |
|
RU2753990C1 |
| СИСТЕМА ДЛЯ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНАХ | 2014 |
|
RU2583397C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ СКОРОСТИ ДВИЖЕНИЯ ПОЕЗДА | 2005 |
|
RU2283255C1 |
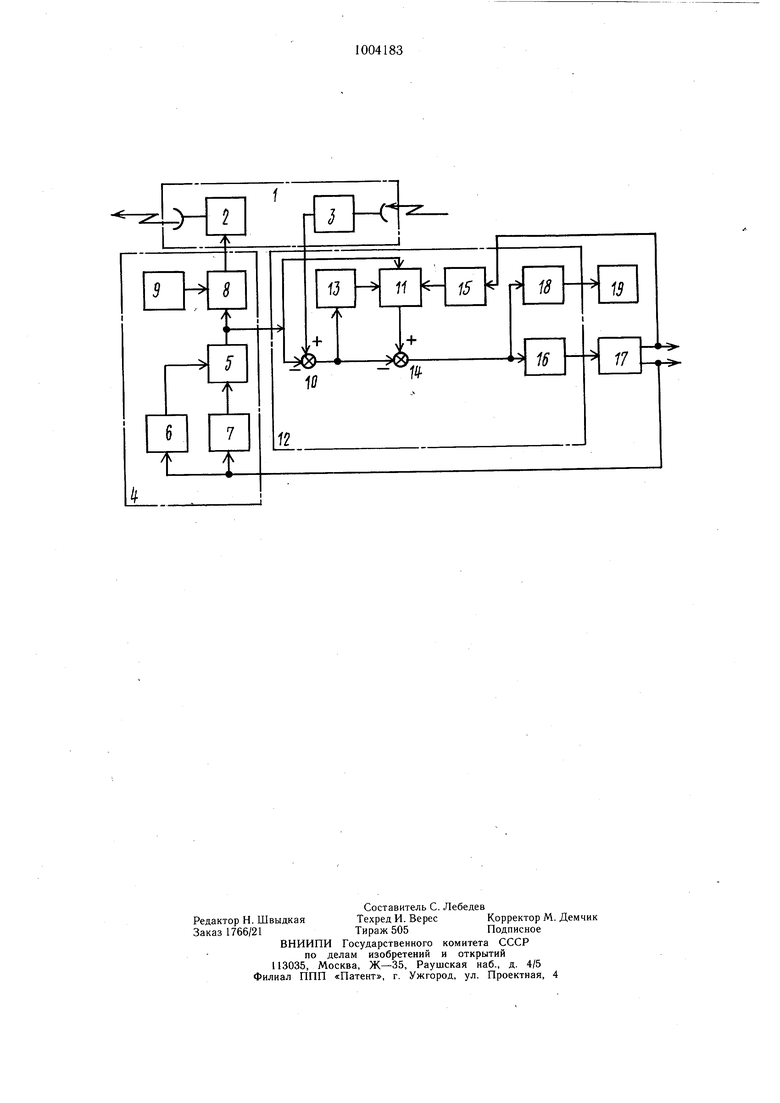
Изобретение относится к железнодорожной автоматике и предназначено для регулирования интервалов между поездами на перегонах. Известно устройство для интервального регулирования движения поездов, содержащее установленные на локомотиве передатчик и приемник, узел вычисления пройденного пути, блок фиксации положения поезда с подключенными к нему датчиками пройденного пути и периодических отметок пройденных участков, узел управления движением локомотива, состоящий из сумматора, соединенного с выходом приемника, датчика скорости, блока переключения сигнальных показаний локомотивного светофора и регулятора скорости, соединенного с выходом приемника, датчика скорости, блока переключения сигнальных показаний локомотивного светофора и регулято ра скорости, соединенного с исполнительным блоком локомотива 1. Недостатком этого устройства является то, что при определении минимально допустимого интервала не учитываются профиль пути, масса поезда и его тормозные характеристики. Цель изобретения - расширение функциональных возможностей. Поставленная цель достигается тем, что в устройстве узел вычисления пройденного пути снабжен датчиком контроля разрыва поезда и блоком вычисления местонахождения хвостового вагона, а узел управления движением локомотива снабжен блоком вычисления величины допустимого интервала между поездами, дифференцирующим блоком и вторым сумматором, при этом вход передатчика подключен к выходу блока вычисления местонахождения хвостового вагона, соединенного одним входом с датчиком контроля разрыва поезда, а другим - с блоком фиксации положения поезда и с соединенными между собой первым входом блока вычисления величины допустимого интервала и входом первого сумматора, выход которого соединен с входом дифференцирующего блока и одним входом второго сумматора, соединенного своим выходом с блоком переключения сигнальнх показаний локомотивного светофора и регулятором скорости, а другим входом - с выходом блока вычисления величины допустимого интервала между поездами, подключенноГО своим вторым и третьим входами к выходам диффереицирующего блока и датчика скорости. На чертеже представлена блок-схема устройства для иитервального регулирования движения поездов. Устройство содержит приемопередатчик 1, содержащий передатчик 2 и приемник 3. Узел 4 вычисления пройденного пути устройства для интервального регулирования движения поездов на каждом поезде содержит блок 5 фиксации положения поезда, входы которого соединены с выходами датчика б пройденного пути, например тахометрического, и датчика отметок пройденного пути 7, например электромагнитного, который фиксирует сигналы путевых датчиков, установленных с постоянньш интервалом. На входы блока 8 вычисления местонахождения своего хвостового вагона подаются сигналы с в-ыхода блока 5 фиксации положения поезда и датчика 9 отсутствия разрыва поезда, работающего, например, по принципу контроля давления в тормозной магистрали поезда. Выходной сигнал блока 8 вычисления местонахождения своего хвостового вагона подается на вход передатчика 2. Выходной сигнал блока 5 фиксации положения поезда узла 4 вычисления пройденного пути подается также на один из входов сумматора 10, соединенного с одним из входов блока 11 вычисления величины допустимого интервала между поездами узла управления движением локомотива 12. На второй вход сумматора 10 подается сигнал с выхода приемника 3 локомотивного приемопередатчика 1, а выход этого сумматора соединен с входом дифференцирующего устройства 13 и одним из входов второго сумматора 14. Выходной сигнал дифференцирующего устройства 13 подается на второй вход блока 11 вычисления величины допустимого интервала между поездами, соединенного своим третьим входом с датчиком скорости поезда 15, например тахогенераторным, а выходом с вторым входом сумматора 14. Выходной сигнал сумматора 14 подается на вход регулятора скорости 16, управляющего исполнительным блоком 17 локомотива, а также на вход блока 18 переключения сигнальных показаний, связанного своим выходом с локомотивным светофором 19 и управляющего его огнями. Устройство работает следующим обраПеред отправлением поездов в блок ,8 вычисления, местонахождения своего хвостового вагона узла 4 вычисления пройденного пути каждого поезда задается длина этого поезда, а в блок 11 вычисления выличины допустимого интервала между поездами задается масса своего поезда, характеристики его тормозной системы и профиль впереди лежащего пути. Если после начала движения сигнал на входе приемника 3 отсутствует по какой-либо причине (впереди нет поездов, отказ на впереди идущем поезде и т. п.), узел 12 управления движением локомотива выключается, и машинист ведет поезд по показаниям сигналов автоблокировки. После проследования поездом точки начала отсчета в блок 5 фиксации положения поезда поступает сигнал с датчика отметок пройденного пути 7. В блок 5 фиксации положения поезда также непрерывно поступает сигнал с датчика 6 пройденного пути. Начиная с этого момента на выходе блока 5 появляется сигнал, пропорциональный величине пройденного пути. Этот сигнал подается в блок 8 вычисления местонахождения своего хвостового вагона, где в соответствии с заданной длиной поезда производится операция вычитания из пройденного пути длины поезда. При отсутствии разрыва поезда, что контролируется датчиком 9 отсутствия разрыва поезда, сигнал, пропорциональный расстоянию, пройденному хвостовым вагоном поезда от начальной точки отсчета, подается на выход передатчика 2, где он соответствующим образом кодируется, и в канал связи посылается сигнал, несущий информацию о положении на перегоне хвостового вагона рассматриваемого поезда. При разрыве поезда датчик 9 подает сигнал в блок 8 вычисления местонахождения хвостового вагона и передатчик 2 прекращает передавать сигналы. После выхода первого поезда за условную точку разрещается движение второго поезда, и в приемник 3 второго поезда поступает сигнал с информацией о местонахождении хвоста первого поезда. После дещифровки этот сигнал поступает на вход сумматора -10. На второй вход сумматора 10 поступает сигнал, пропорциональный расстоянию, пройденному вторым поездом. Тогда сигнал на выходе сумматора 10 пропорционален действительному интервалу между движущимися поездами. Выходной сигнал сумматора 10 подается одновременно на вход дифференцирующего устройства 13 и на один из входов сумматора 14. Сигнал на выходе дифференцирующего устройства 13 несет информацию о Динамике изменения расстояния между указанными поездами - нагоняет задний поезд впереди идущего или отстает. Данный сигнал подается на один из входов блока 11 вычисления величины допустимого интервала между поездами. На другой вход этого блока подается сигнал с выхода датчика скорости 15, пропорциональный скорости движения поезда, а на третий вход - сигнал с блока 5 фиксации положения поезда. .-5: в блоке 11 на основе информации о маесе поезда, профиле пути и тормозных характеристиках, а также информации о скорости и динамике сближения с первым поездом вычисляется величина допустимого интервала между поездами. Сигнал с выхода 5 блока 11 подается на второй вход сумматора 14. Сигнал на выходе этого сумматора- пропорционален разности между допускаемым и действительным значениями ий-; тервала между поездами. Этот сигнал подается одновременно на входы регулятора скорости 16 локомотива и блока 18 переключения сигнальных показаний локомотивного светофора 19. При этом блок 18 переключений сигнальных показаний включает на локомотивном светофоре 19 соот- 5 ветствующий сигнал об увеличении или уменьшении скорости. Если блок 17 локолютива снабжен автоматическим регулятором скорости 16, .поступлении такого сигнала регулятор 16 подает команду на блок 17 о соответствую-20 щем изменении скорости. Таким образом, устройство автоматически доводит интервал попутного следования поездов до минимально допустимого. При движении второго поезда блок 8 вычисления местонахождения 25 его хвостового вагона также вырабатывает сигнал, пропорциональный расстоянию, пройденному хвостовым вагоном этого поезда от нулевой точки. Этот сигнал подается на вход передатчика 2, откуда указанная информация в виде закодированного сиг- 30 нала передается в приемопередатчик последующего поезда. Для того, чтобы сигнал не воспринимался другими поездами, приемопередатчики имеют различные частоты, а в сигнале закодирован номер поезда. При отказах в устройстве интервального регулирования движения поезда начинают двигаться по сигналам автоблокировки. Технико-экономическая эффективность от использования устройства по сравнению 40 с прототипом., состоит в увеличении пропускной способности и точности интервального регулирования. 1004 83., . 6.у, Формула изобретения Устройство для интервальйххго регулирования движения поездов, содержащее установленные на локомотиве передатчик и приемник, узел вычисления пройденного пути, блок фиксации положения поезда с подключенными к нему датчиками пройденного пути и периодических отметок пройденных участков, узел управления движением локомотива, состоящий из сумматора, соединенного с выходом приемника, датчика скорости, блока переключения сигнальных показаний локомотивного светофора и регулятора скорости, соединенного с исполнительным блоком, отличающееся тем, что, с целью расширения функциональных возможностей, узел вычисления пройденного пути снабжен датчиком контроля разрыва поезда и блоком вычисления местонахождения хвостового вагона, а узел управления движением локомотива снабжен блоком вычисления величины, допустимого интервала между поездами, дифференцирующим блоком и вторым сумматором, при этом вход передатчика подключен к выходу блока вычисления местонахождения хвостового вагона, соединенного одним входом с датчиком контроля разрыва поезда, а другим - с блоком фиксации положения поезда и с соединенными между собой первым входом блока вычисления величины допустимого интервала и входом первого сумматора, выход которого соединен с входом дифференцирующего блока и-одним входом второго сумматора, соединенного своим выходом с блоком переключения сигнальных показании локомотивного светофора и регулятором скорости, а другим входом - с выходом блока вычисления величины допустимого интервала между поездами, подключенного своим вторым и третьим входами к выходам дифференцирующего блока и датчика скорости. Источники информации, принятые во внимание при экспертизе 1. Патент ФРГ № 2114621, кл. В 61 L 23/18, 21.06.79 (прототип).
