Изобретение относится к железнодорожной автоматике и предназначено для регулирования интервалов между поездами на участках железных дорог.
Цель изооретения - повышение точности
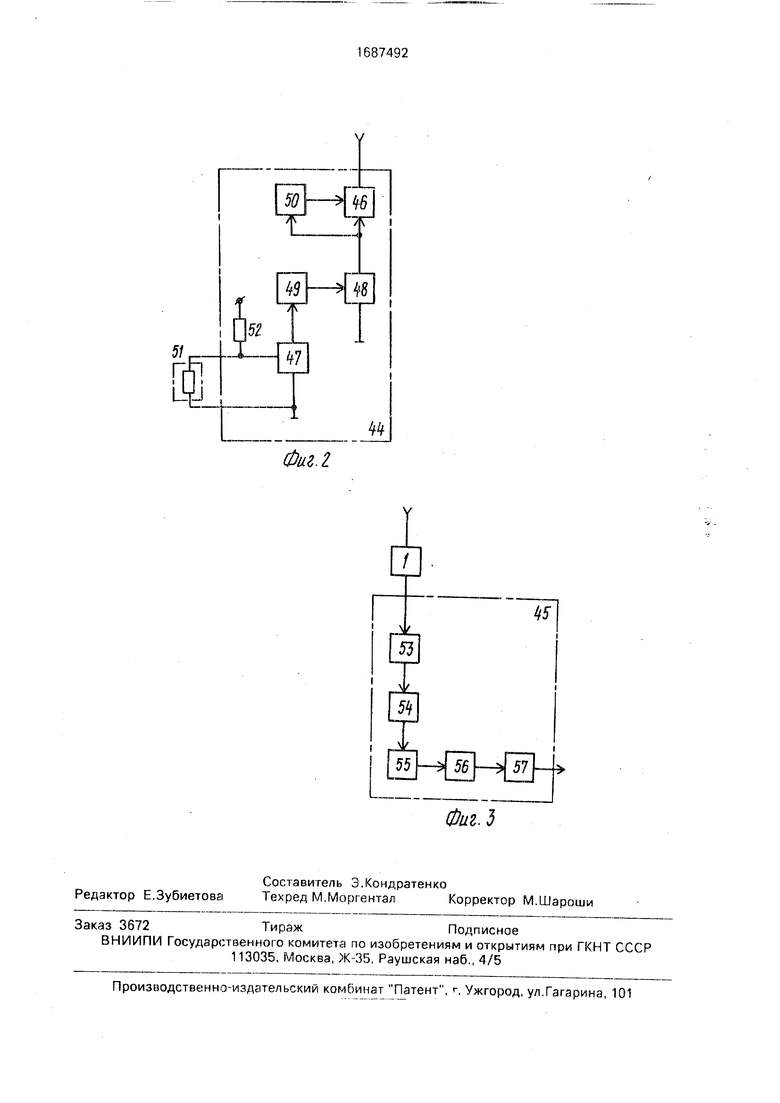
На фиг. 1 представлена функциональная схема устройства; на фиг 2 - функциональная схема радиопередатчика блока датчика контроля отсутствие разрыва поезда; на фиг. 3 - приемник сигналов
Устройство содержит приемопередатчик 1, включающий передатчик 2 с шифратором и приемник 3 с дешифратором, а также узел 4 автоматического регулирования величины межпоездного интервала и узел 5 управления тяговой и тормозной системами локомотива.
Приемник 3 первым выходом подключен в узле 4 автоматического регулирования величины межпоездного интервала через элемент 6 сравнения к входу элемента 7
о со х|
-N ю
ю
сравнения, соединенного с локом 8 задания
Устройство содержит также блок У задания длины поезда, соединенный с элементом 10 сравнения и с ключевым элементом 11, который соединен с передатчиком 2. Устройство содержит также датчик 12 отсутст- вия разрыва поезда, работающий, например, по принципу контроля давления в тормозной магистрали поезда или с использованием радиотелемеханических средств, который подключен к управляющему входу ключевого элемента 11 и к входу блока 13 сигнализации, датчик 14 пройденного пути, например, комбинированного ти- , па, работающий по принципу вычисления пройденного пути на основании показаний входящего в него тахометра и электромагнитного датчика отметок пройденного пути, фиксирующего сигналы путевых датчиков, установленных постоянным интервалом, блок 15 определения тормозного пути, датчик 16 скорости давления в тормозном цилиндре локомотива, блок 19 регулирования скорости, а к блоку 15 определения тормозного пути подключены блок 20 задания допустимой скорости соударения при сцеплении поездов на ходу, задатчики 21- 26 соответственно массы состава, учтенной массы локомотива, состава поезда в вагонах, расчетного коэффициента трения тормозных колодок, силы нажатия колодок на ось и основного удельного сопротивления движению поезда при холостом ходе локомотива в расчетном интервале скоростей.
Устройство также содержит сумматор 27, компаратор 28 и дифференцирующий блок 29 элемент 30, отсечки который соединен с элементом 31 сравнения, элемент 32 отсечки, который подключен к элементу 33 сравнения, ключевой элемент34, соединенный с элементом 35 отсечки, соединенным с элементом 36 сравнения, соединенный с блоком 20 элемент 37 сравнения, элемент 38 сравнения, датчик 39 скорости сближения, например, доплеровский радиолокатор, датчик 40 сцепления поездов, например концевого, выключатель, блок 41 задания скорости, входящий в узел 5, в который также входит блок 19 регулирования скорости и исполнительные блоки 42 и 43.
Датчик 12 контроля отсутствия разрыва поезда включает в себя радиопередатчик 44, устанавливаемый на последнем вагоне поезда 4 приемник 45 сигналов телеконтроля, первый из которых имеет радиопередающий блок 46, электронные ключевые элементы 47 и 48, генератор 49 импульсов, модулятор 50 и датчик 51 сравнения в тормозной магистрали, включаемый последовательно с резистором 52, образуя с ним делитель, а второй имеет фильтр 53, усилитель-ограничитель 54, дешифратор 55, пороговый элемент 56 и блок 57 сопротивления
с управляющими входом ключевого элемента 11 и с блоком 13 сигнализации.
Устройство интервального регулирования работает следующим образом. Перед отправлением поезда в блок 15 закладыва0 ется информация о плане и профиле пути, в блоке 9 задается длина своего поезда, в блоке 8 задается требуемое значение интервала попутного следования, а в блоке 20 и элементах 21-26 задаются соответственно
5 допустимая скорость соударения при сцеплении на ходу, масса состава, учетная масса локомотива, состав поезда в вагонах, рас- чы ый коэффициент трения тормозных колодок, сила нажатия колодок на ось, основы удельного сопротивления движению поезда
0 при холостом ходе локомотива в расчетном интервале скорости.
При этом в качестве допустимой скорости соударения при сцеплении поездов на ходу может быть выбрана, например, скоро5 сть 5 км/ч, принятая в качестве допустимой для соударения бегунов на подгорочных путях сортировочных станций. В компараторе 28 задается величина межпоездного интервала, при котором обеспечивается точное
0 сближение поездов.
После отправления поезда со станции и проследовании его хвостовым вагоном точки начала отсчета пройденного пути при отсутствии разрыва поезда, что
5 контролируется датчиком, на выходе ключевого элемента 11 появляется сигнал, пропорциональный разности пройденного пути локомотива поезда, измеряемого датчиком 14 и длины поезда, заданного блоком 9, т.е.
0 сигнал, пропорциональный расстоянию, пройденному хвостом поезда, подается на вход передатчика 2, где он кодируется, и в радиоканал связи посылается сигнал, несущий информацию о положении на желез5 нодорожном участке хвостового вагона этого поезда.
Одновременно блок 15 на основании заданных блоком 20 и элементами 21-26 величин, а также на основании непрерывно
0 поступающих от датчиков 14, 16, 18 сигналов вычисляет значение тормозного пути по известным зависимостям.
500 (VJj - УЈ)
5
с у
Д /(lOOOVpfOkp + +lc) где VH - начальная скорость в расчетном интервале;
УК - конечная скорость в расчетном интервале;
) - 120 - замедление поезда под действием удельного тормозного коэффициента;
V- расчетный тормозной коэффициент;
/ расчетный тормозной коэффициент трения тормозных колодок в интервале скоростей;
оь«- основное удельное сопротивление движению поезда при холостом ходе локомотива в расчетном интервале скоростей;
1с - удельное сопротивление от скормленного (в плане и в профиле) уклона, для которого производятся расчеты.
Подготовительный тормозной путь определяется по формуле
Sn 0,278V0tn,
где V0 - скорость поезда в начале торможе- ния;
tn - время подготовки тормозов к действию.
Расчетный тормозной коэффициент определяется по формуле:
где Z Кр - сумма расчетных сил нажатия на тормозные оси поезда;
Ру - учетная масса локомотива.
При разрыве поезда отдатчика 12 подается сигнал на управляющий вход ключевого элемента 11, и он разрывает цепь на передатчик 2.
Сигналы с информацией о местонахождении хвоста впереди идущего поезда и текущем значении его тормозного пути поступает в приемник 3 следующего за первым поездом.
После дешифрации сигнал, пропорциональный расстоянию, пройденному хвостовым вагоном идущего впереди поезда, вычитается на элементе 6 из сигнала, пропорционального пройденному расстоянию готовой последующего поезда, т.е. на выходе этого элемента 6 сравнения получается сигнал, пропорциональный текущему значению интервала попутного следования между этими поездами.
Сигнал с информацией о текущем значении тормозного пути идущего впереди поезда после деформации в приемнике 3 с его выхода подается на сумматор 27, на кото- рый подается также сигнал, с блока 15, про- порциональный текущему значению собственного тормозного пути, и сигнал с выхода элемента 6, пропорциональный величине интервала попутного следования между поездами, т.е. на выходе сумматора получается сигнал, пропорциональный разности своего тормозного пути и суммы тор5
0
5
0
5
0
5
0
5
0 5
мозного пути впереди идущего поезда и величины межпоеэдного интервала.
Скоростной режим движения поезда задается машинистом или автоматическим блоком 41. Сигнал, пропорциональный заданной скорости, через элементы 33, 31, 36 поступает на элемент 17, на который также поступает сигнал от датчика скорости.
Сигнал с выхода элемента 17 подается на блок 19, где обеспечивается выбор режима работы исполнительных блоков 42 и 43.
Если действительное значение межпоездного интервала больше заданного, сигнал на выходе элемента 7 отрицателен, и на входе элемента 32 сигнала нет. Поезд в этом случае следует со скоростью, заданной блоком 41. Если действительное значение межпоездного интервала становится меньше заданного, появляется сигнал на выходе элемента 32 и на входе элемента 33, корректирующий задание по скорости движения поезда до тех пор, пока межпоездной интервал не станет равным заданному.
Точно также до тех пор, пока текущее значение собственно тормозного пути не превышает сумму текущих значений тормозного пути впереди идущего поезда и интервала между этими поездами, отрицательный сигнал с выхода сумматора 27 не пропускается элементом 30 на вход элемента 31 и коррекция скорости не производится. Если текущее значение собственного тормозного пути начинает превышать указанную сумму, знак сигнала на выходе сумматора 27 меняется, на выходе элемента 30 и на входе элемента 31 появляется сигнал, корректирующий задание по скорости в сторону уменьшения.
Если в процессе движения в соответствии с заданием по величине межпоездного интервала поезда сближаются на расстояние, на котором обеспечивается точное сближение поездов, т.е. на котором должна начинать работать обратная связь по допустимой скорости соударения при сцеплении поездов на ходу, на выходе компаратора 28 появляется сигнал, подаваемый на вход ключевого элемента 35, отчего его исполнительная цепь замыкается, подключая выход элемента 37 к входу элемента 35. На элементе 37 сравнивается сигнал с выхода дифференцирующего блока 29, пропорциональный действительной скорости сближения, и сигнал с выхода блока 20. При этом до тех пор, пока действительная скорость сближения не превышает допустимую, отрицательный сигнал с выхода элемента 37 не пропускается элементом 35 на вход элемента 36 и корректирования скорости не происходит. Если скорость сближения начинает превышать допустимую, на входе элемента 36 появляется сигнал, в результате скорость начинает уменьшаться до тех пор, пока действительная скорость сближения не перестанет превышать допустимую.
При выходе на прямую видимость более точный контроль сближения осуществляется посредством датчика 39, сигнал с которого подается на элемент 38. Выходной сигнал элемента 38 пропорционален разности выходных сигналов блока 29 и датчика 39, т.е. пропорционален ошибке контроля данного параметра разными контрольными устройствами.
При необходимости безостановочного формирования соединенного поезда блоком 8 задается нулевое значение межпоездного интервала. Тогда обеспечивается безостановочное сцепление ведомого поезда с впереди идущим, и после сцепления этих поездов датчик 40 дает сигнал об окончании сближения поездов.
Для безостановочного расформирования соединенного поезда локомотивы могут быть оборудованы устройствами для разьединения из кабины машиниста сцепления локомотива с последним вагоном следующего впереди состава.
Три приближении к участковой станции где соединенный поезд останавливает- ся, из кабины головного локомотива подается команда на расцепление поездов. По этой команде машинист ведомого локомотива разъединяет сцепление своего локо- мотива с последним вагоном и устанавливает блоком 8 требуемую величину межпоездного интервала.
Датчик 12 работает следующим образом. При изменении давления в тормозной магистрали меняется сопротивление датчика давления 51. Если давление не ниже нор- мального, ключевой элемент 47 обеспечивает работу генератора 49, который обеспечивает периодическое срабатывание ключевого элемента 32. При замыкании исполнительной цепи ключевого элемента 48 подается питание на модулятор 50 и радиопередающий блок 46, в результате в радиоканал подается импульсный радиосигнал. Этот сигнал воспринимается радиопередатчиком и с его выхода через фильтр 53 и усилитель-ограничитель 54 подается на дешифратор. Если импульсы с радиопередатчика 44 приходят с заданной периодичностью, на выходе дешифратора поддерживается напряжение, достаточное для срабатывания порогового элемента 56, наличие выходного сигнала которого является подтверждением отсутствия разрыва поезда.
При разрыве поезда давление в тормозной магистрали последнего вагона падает и изменение сопротивления датчика 51 давления приведет к изменению потенциала в
средней точке делителя напряжения, собранного на датчике 51 давления и резисторе 52. Ключевой элемент 47 закрывается, оабота генератора 49 прекращается и радиопередатчик 44 перестает подавать ра0 диосигналы. Отсутствие импульсов на входе дешифратора 55 приемника сигналов телеконтроля 45 приведет к исчезновению сигналов на его выходе.
Формула изобретения
5 Устройство для интервального регулирования движения поездов, содержащее установленные на локомотиве передатчик и , мник, один из выходов которого подключен к первому входу одного из элемен0 тов сравнения, выход которого соединен с входом дифференцирующего блока л с одним из входом другого элемента сравнения, соединенного вторым входом с блоком задания расстояния между поездами, блок за5 дания длины поезда, связанный с передатчиком и с датчиком пройденного пути, блок регулирования скорости и датчик скорости, отличающееся тем, что, с целью повышения точности, оно снабжено
0 блоками задания скорости и допустимой скорости соударения при сцеплении на ходу, компаратором, элементами отсечки, дополнительными элементами сравнения, сумматором, ключевым элементом и блоком
5 определения тормозного пути, соединенным входами с датчиками пройденного пути и скорости и с выходом блока задания допустимой скорости соударения при сцеплении на ходу, а выходом - с вторым входом пере0 датчика и одним из входов сумматора, подключенного вторым входом к второму выходу приемника, третьим входом - к выходу первого элемента сравнения, а выходом через первый элемент отсечки -- к
5 первому входу третьего элемента сравнения, причем выход второго элемента сравнения через второй элемент отсечки соединен с первым входом четвертого элемента сравнения, компаратор соединен
0 входом с выходом первого элемента сравнения, а выходом - с управляющим входом ключевого элемента, соединенного выходом через третий элемент отсечки с первым входом пятого элемента сравнения, а ин5 формационным входом - с выходом шестого элемента сравнения, к первому входу которого подключен упомянутым выходом блок задания допустимой скорости соударения при сцеплении на ходу, а к второму выходом дифференцирующий блок, а блок задания
допустимой скорости связан с блоком регу- соединенные четвертый, третий и пятый лирования скорости через последовательно элементы сравнения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления движением поездов в режиме виртуальной сцепки | 2024 |
|
RU2828911C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ НА ПЕРЕГОНЕ ПРИ ДИСПЕТЧЕРСКОЙ ЦЕНТРАЛИЗАЦИИ | 2014 |
|
RU2561518C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ НА ПЕРЕГОНЕ ПРИ ДИСПЕТЧЕРСКОЙ ЦЕНТРАЛИЗАЦИИ | 2015 |
|
RU2601496C1 |
| Устройство для интервального регулирования движения поездов | 1981 |
|
SU1004183A1 |
| Децентрализованная система интервального регулирования движения поездов с автоматизированным управлением | 2019 |
|
RU2724476C1 |
| СПОСОБ И СИСТЕМА ДЕЦЕНТРАЛИЗОВАННОГО ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2021 |
|
RU2763015C1 |
| Устройство для регулирования движения поездов | 2023 |
|
RU2806466C1 |
| Способ оценки собственного местоположения транспортного средства, преимущественно высокоскоростного поезда, и устройство для оценки собственного местоположения транспортного средства, преимущественно высокоскоростного поезда | 2023 |
|
RU2809391C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ВОЖДЕНИЯ СОСТАВОВ | 2007 |
|
RU2411147C2 |
| СПОСОБ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ С ПРИМЕНЕНИЕМ КООРДИНАТНЫХ ОТРЕЗКОВ БЕЗ БЛОК-УЧАСТКОВ И ПУТЕВЫХ СВЕТОФОРОВ | 2021 |
|
RU2789232C1 |

Изобретение относится к железнодорожной ЭВТОМЗТИКР в частности к способам и системам интервального регулирования движения моездпч Цель изобретения повышение точноС|И Величину интервала попутного следование « оечдов для достижения его -аданного значения регулируют изменением сил тяги и юрр жения с одновременным непрерывном контролем отсутствия разрыва поезда Дополнитель ное регулирование скорости поезда осуществляют в зависимости от результатов сравнения фактической скорости сближения поездов с допустимой и фактического текущего значения своего тормозного пути с суммой величины межпоездного интервала и тормозного пути впереди идущего поезда В устройстве имеется блок 15 определения тормозного пути, датчик скорости сближения и датчик 40 сцепления поездов, компаратор ключевой элемент, блок 20 задания допустимой скорости соударения при сцеплении поездов на ходу, причем сигналы на элементы 33, 31, 36 сравнения подаются через поворотные элементы 32. 30 35, на вход первого из которых подается сигнал, пропорциональный разности теку- ще о значения своего тормозного пути с суммой тормозного пути идущего впереди поезда и межпоездного интервала, а на входы второго и третьего пороговых элементов подаются сигналы, пропорциональные соответственно разности действительного и заданного значений межпоездного интервала. 3 ил. (/) С
Фиг Л
Фиг. 2
| Устройство для интервального регулирования движения поездов | 1981 |
|
SU1004183A1 |
