(5) УПРАВЛЯЕМЫЙ ФИЛЬТР

| название | год | авторы | номер документа |
|---|---|---|---|
| Сглаживающий фильтр | 1981 |
|
SU1003302A1 |
| Управляемый сглаживающий фильтр | 1982 |
|
SU1061250A1 |
| Управляемый фильтр | 1981 |
|
SU970644A1 |
| Управляемый фильтр | 1985 |
|
SU1279054A2 |
| Управляемый фильтр | 1980 |
|
SU959268A2 |
| Интерполирующий фильтр | 1982 |
|
SU1030958A1 |
| Управляемый фильтр | 1984 |
|
SU1149214A1 |
| Адаптивный прогнозатор | 1982 |
|
SU1049866A1 |
| Сглаживающий фильтр | 1983 |
|
SU1117583A2 |
| Управляемый фильтр | 1979 |
|
SU884082A1 |
1
Изобретение относится к автоматическому управлению и регулированию и может быть использовано для выделения низкочастотной составляющей измеренных сигналов в условиях, когда имеется информация о ее.существенных изменениях, например при взвешивании в движении составов со слитками металла на металлургических заводах, когда имеются сигналы от фотодатчи- «) кое о моментах наезда и съезда платформы со слитками на взвешивающее устройство, а также при нагреве слитков металла, когда имеются сигналы о моментах посада и выдачи слитков из на- is гревательных колодцев.
Известно сглаживающее устройство, содержащее ограничитель уровня сигнала, два интегратора, масштабирующий усилитель, блок сравнения, первый 20 вход которого подключен ко входу устройства, выход - через ограничитель уровня сигнала ко входу первого интегратора, выход которого подключен к выходу устройства, к второму входу блока сравнения, через второй интегратор и масштабирующий усилитель к ог раничителю уровня сигнала 13
Недостатком указанного устройства является низкая точность выделения полезного сигнала в случае, когда статические и структурные свойства полезного сигнала и помехи изменяются. Настроечные параметры сглаживающего устройства, к которым относятся постоянная времени интегрирования Т первого интегратора и величина ограничивающего напряжения jb ограничителя сигнала, определяются при. фиксированных указанных свойствах сигнала.
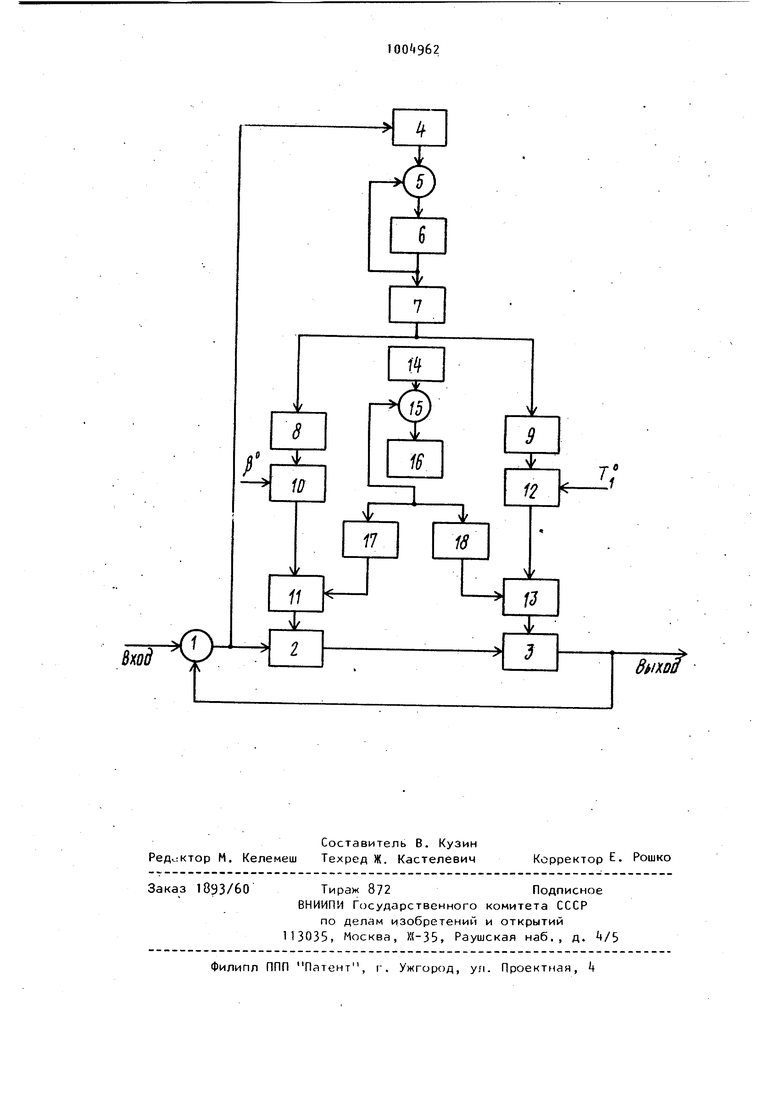
Наиболее близким к изобретению по технической сущности и достигаемому результату является управляемый фильтр, содержащий последовательнЬ соединенные первый бло.к сравнения, ограничитель и первый интегратор,- выход которого соединен со вторым входом первого .блока сравнения, последовательно соединенные детектор знака вход которого соединен с Выходом первого блока сравнения, второй блок сравнения, второй интегратор, выход которого соединен с вторым входом второго блока сравнения, квадратор, первый масштабирующий усилитель, . первый сумматор, выход которого подключен к дополнительному входу ограничителя, последовательно соединенные второй масштабирующий усилитель вход которого соединен с выходом ква ратора, второй сумматор, выход которого соединен с дополнительным входом первого интегратора, причем другой вход каждого из сумматоров подключен к источнику сигнала постоянной величины 2}. Недостатком этого устройства при его использовании в указанных условиях является низкая точность выде,ления полезного сигнала, так как не используется дополнительная информация о существенных изменениях низкочастотной составляющей Целью изобретения является повышение точности выделения полезного сигнала. Поставленная цель достигается тем что управляемый фильтр, содержащий последовательно соединенные первый блок сравнения, ограничитель и первый интегратор, выход которого подключен к второму входу первого блока сравнения, последовательно соединенные детектор знака, вход которого подключен к выходу первого блока сравнения, второй блок сравнения, второй интегратор, выход которого соединен с вторым входом второго бло ка сравнения, квадратор, первый масштабирующий усилитель, первый сумматор, последовательно соединенные второй масштабирующий усилитель, вто рой сумматор, вход второго масштабирующего усилителя подключен к выходу квадратора, вторые входы первого и второго сумматоров подключены к источнику сигнала постоянной величины, содержит последовательно соединенные датчик инициативного сигнала, третий блок сравнения и третий интегратор, подключенный выходом к второму входу третьего блока сравнения, третий мас штабирующий усилитель и третий сум матор, последовательно соединенные четвертый масштабирующий усилитель, j четвертый сумматор, выход которого соединен с дополнительным входом первого интегратора, а второй вход подключен к выходу второго сумматора, выход третьего сумматора соединен с дополнительным входом ограничителя, а второй вход подключен к выходу первого сумматора, вход четвертого масштабирующего усилителя подключен к выходу третьего интегратора. На чертеже представлена структурная схема предложенного управляемого фильтра. Управляемый фильтр содержит первый блок 1 сравнения, первый вход которого подключен ко входу устройства, а выход - через ограничитель 2 ко входу первого интегратора 3, выходом соединенного со вторым входом . первого блока 1 сравнения и с выходом устройства. Вход детектора 4 знака подключен к выходу первого блока 1 сравнения, а выход - к первому входу второго блока 5 сравнения, выход которого соединен со входом второго интегратора 6, выход которого подключен ко второму входу второго блока 5 сравнения и к выходу квадратора 7 Выход последнего подключен ко входам первого 8 и второго 5 масштабирующих усилителей. Выход первого масштабирующего усилителя 8 соединен с первым входом первого сумматора 10, второй вход которого связан с источником сигнала постоянной величины, а выход - с первым входом третьего сумматора 11. Выход второго масштабирующего усилителя 9 соединен с первым входом второго сумматора 12, второй вход которого связан с источником постоянной величины сигнала, а выход - с первым входом четвертого сумматора 13. Выход датчика Т инициативного сигнала через третий блок 15 сравнения и третий интегратор 16 подключен ко входам третьего 17 и четвертого 18 масштабирующих усилителей. Причем ко второму входу третьего блока 15 сравнения подсоединен выход третьего интегратора 16. Выход третьего масштабирующегоусилителя 17 подключен ко второму входу третьего сумматора 11, выход которого соединен с дополнительным входом ограничителя 2. Выход четвертого масштабирующего усилителя 18 подключен ко второму входу четвертого сумматора 13, вы5ход которого соединен с дополнитель ным входом интегратора 3Устройство работает следующим об разом. Входной сигнал поступает на вход первого блока 1 сравнения, в котором из него вычитается выходной си(- нал устройства, и получаемая разность E(t) поступает на вход ограни чителя 2 и вход детектора i знака. Если E(t) превышает величину ограничивающего напряжения рграничите.ля то в последнем разность E(t) ограни чивается до этой величины согласно выражению fb при .E(t) /f) E(t) E(t) при - (t)(, -P при E(t) 4--l (t) P -выходной сигнал ограничителя 2; -величина ограничивающег напря ; ения. Ограничитель 2 может быть реализован, например, с помощью операционного усилителя, в режиме насыщения. Сигнал Е (t) с выхода ограничите ля 2 поступает на вход первого инте гратора 3, выполненного с помощью, например, операционного усилителя с емкостной отрицательной обратной связью. На выходе первого интеграто ра 3 получается сглаженный сигнал, который и поступает на выход устройства. Все остальные блоки управляемого фильтра предназначены для адаптации его настроек: величины ограничивающего напряжения л ограничителя 2 и постоянной времени интегрирования Т первого интегратора 3. Сигнал с выхода детектора 4 знак равный +1 или -1 в зависимости от сигнала E(t), поступающего на вход детектора знака с выхода первого блока 1 сравнения, идет на первый вход второго блока 5 сравнения, в к .тором из него вычитается выходной с нал второго интегратора 6. Иными словами, на выходе второго интегратора 6 получается сглаженный сигнал от детектора знака. С выхода второго интегратора 6 сигнал через квадратор 7, в котором он возводится в квадрат, поступает на входы двух масштабирующих усилителей 8 и 9, где производится умножение сигна ла на коэффициенты k j и Выходной сигнал первого масштабирующего усилителя 8 суммируется в первом сумматоре 10 с постоянным сигналом Р)®, и полученный сигнал /i поступает на первый вход третьего сумматора 11. Выходной сигнал второго масштабирующего усилителя 9 суммируется во втором сумматоре 12 с постоянным сигналом Т, а полученный сигнал поступает на первый вход четвертого сумматора 13. Датчик It инициативного сигнала, третий блок 15 сравнения, третий ин- тегратор 16, третий 17 и четвертый 18 масштабирующие усилители предназначены для корректировки коэффициентов и Т в зависимости от контролируемых изменений внешних условий (программное изменение коэффициентов). В конкретном варианте реализации управляемого фильтра эти корректировки осуществляются по выражениям 5-a-fci pnp(t) Т P/t) - k Р- по / дб. I где k,k постоянные коэффициенты;интервал времени отсчета после поступления инициативного си1- нала. Из этих выражений видно, что при изменении внешних условий, т.е. в случае начала существенного изменения полезного сигнала, коэффициенты fb и Т скачкообразно увеличиваются на значения k2И k, которые -впоследствии экспоненциально уменьшаются, Для осуществления описанной процедуры сигнал с выхода датчика поступает на блок реализации функции е,которая воспроизводится с помощью блока сравнения и интегратора. . Датчик k инициативного сигнала вырабатывает сигнал импульсной формы при существенных изменениях внешних условий. Этот сигнал поступает на первый вход блока 15 сравнения, где из него вычитается сигнал с выхода третьего интегратора 16, который соединен со вторым входом блока 15 сравнения. Выходной сигнал третьего интегратора 16 поступает на входы третьего 17 и четвертого 18 масштабирующих усилителей, где производится умножение сигнала на коэффициенты k . Выходной сигнал третьего масштабирующего усилителя 17 поступает на второй вход третьего сумматора 11, где суммируется с величиной /i, задавая величину ограничивающего напряжения fb ограничителя 2. Выходной сигнал четвертого масштабирующего усилителя 18 поступает на второй вход четвертого сумматора 13, где суммируется с величиной Т.|, задавая величину постоянной вре мени интегрирования Т первого интегратора 3. Постоянная времени интегрирования 1,2 второго интегратора 6, масштабирующие коэффициенты k, kn kзи k масштабирующих усилителей, сигналы гь° и Т° определяются экспериментально в зависимости от свойст и помехи. В частполезного сигнала ности и Т5 выбираются при минимальной частоте полезного сигнала и минимальной величине помехи. Таким образом, предложенное техническое решение.позволяет повысить тбчность выделения полезного сигнал ,в тех случаях, когда имеется информация о существенном изменении низк частотной составляющей сигнала. Формула изобретения ;гУправляемый фильтр, содержащий последовательно соединенные первый блок сравнения, ограничитель и первый интегратор, выход которого подключен к второму входу первого блока сравнения, последовательно соединенные детектор знака, вход которого l z 8 подключен к выходу первого блока сравнения, второй блок сравнения, второй интегратор, выход которого соединен с вторым входом второго блока сравнения, квадратор, первый масштабирующий усилитель, первый сумматор, последовательно соединенные второй масштабирующий усилитель, второй сумматор, вход второго масштабирующего усилителя подключен к выходу квадратора, вторые входы первого и второго сумматора подключены к ис точнику сигнала постоянной величины, отличающийся тем, что, с целью повышения точности выделения полезного сигнала, он содержит последовательно соединенные датчик инициативного сигнала, третий блок сравнения и третий интегратор, подключенный выходом к второму входу третьего блока сравнения, третий масштабирующий усилитель и третий сумматор, последовательно соединенные четвертый масштабирующий усилитель и четвертый сумматор, выход которого соединен с дополнительным входом первого интегратора, а второй вход подключен к выходу второго сумматора, выход третьего сумматора соединен с дополнительным входом ограничителя, а второй вход подключен к выходу первого сумматора, вход четвертого масштабирующего усилителя подключен к выходу третьего интегратора. Источники информации, принятые во внимание при экспертизе 1.Патент Великобритании № Й69605, кл. Н 3 W, опублик. 1977. 2.Авторское свидетельство СССР по заявке № 28 8 82/18-09, кл. Н 03 Н 21/00 1980 (прототип).
