частоты подключен к второму входу первого су№ атора и через второй блок сравнения к входу третьего фильтра низкой частоты, выход первого су7- матора подключен к первому . входу второго блока анализа и к вторым входам третьего сумматора и пятого блока умножения,/вы-ход третьего сумматора через третий блок анализа соединен с вторым входом пятого сумматора, третий вход которого связан с выходом первого блока анализа и вторым входом первого блока деления, выход второго блока анализа подютючен к первому входу третьего блока деления, выход пятого сумматора соединен с вторьм входом третьего блока деления и через второй.блок деления с вторым входом третьего блока умножения.
9214
второй и третий входы четвертого сумматора соединены с выходами соответственно пятого и четвертого блоков умножения, выход четвертого сзл матора подгатючен к выходу управляемого фильтра, второй вход блоков анализа подключен к первому входу третьего блока сравнения, второй вход которого связан с первым входом блоков анализа, а выход - с входом первого детектора знака, выход первого блока умножения соединён с входом инвертора, а выход второго сумматора - с вторым входом пятого блока сравнения, выход второго блока умножения соединен с вторым входом второго сумматора, выход интегратора подключен через- нелинейный блок к выходу блока анализа.

| название | год | авторы | номер документа |
|---|---|---|---|
| Интерполирующий фильтр | 1983 |
|
SU1109891A1 |
| Устройство для идентификации объекта | 1985 |
|
SU1298718A1 |
| Адаптивный прогнозатор | 1982 |
|
SU1049866A1 |
| Адаптивная система регулирования многомерного объекта | 1981 |
|
SU1174901A1 |
| Управляемый сглаживающий фильтр | 1982 |
|
SU1061250A1 |
| Адаптивный регулятор | 1984 |
|
SU1149215A1 |
| Сглаживающий фильтр | 1981 |
|
SU980065A1 |
| Сглаживающий фильтр | 1981 |
|
SU1003302A1 |
| Сглаживающий фильтр | 1983 |
|
SU1117583A2 |
| Адаптивный прогнозирующий регулятор | 1982 |
|
SU1123020A1 |

УПРАВЛЯЕМЫЙ ФИЛЬТР, содержащий первый фильтр низкой частоты, первый и второй блоки сравнения, первый сумматор, первый блок анализа, включающий третий блок сравнения. Последовательно соединенные первый детектор знака, первый блок задержки и первый блок умножения, второй вход которого соединен с выходом первого детектора знака, последовательно включенные второй блок задержки, четвертый блок срав нения, второй детектор знака, третий блок задержки и второй блок умножения, второй вход которого соединен с выходом второго детектора знака, последовательно включенные инвертор и второй сумматор, последовательно включенные пятый блок сравнения и интегратор, выход которого соединен с первым входом пятого блока сравнения, первый вход блока анализа соединен с входом второго блока задержки, вторым входом четвертого блока сравнения и выходом первого фильтра низкой частоты, отличающийся тем, что, с целью повьппения точности выделения полезного сигнала фильтром, в него введены второй фильтр низкой частоты, нелинейн блок, последовательно включенный третий (Л фильтр низкой частоты третий сумматор, третий блок умножения и четвертьй сумматор, последовательно включенные второй блок анализа,пятый сумматор, первый блок деления и четвертый блок умножения, последовательно включенные третий блок анализа и второй блок деления, последовательно включенные третий блок деления и пятый блок умножения,причем вход первого фильтра низкой частоты соединен с входом управляемого фильтра, первым входом первого блока сравнения и вторыми входами первого, второго и третьего блоков анализа, выход первого фильтра низкой частоты соединен с вторым входом четвертого блока умножения, первым входом первого сумматора и через первый блок сравнения с входом второго фильтра низкой частоты и первым входом второго блока сравнения, выход второго фильтра низкой
Изобретение относится к автоматике, а именно к. фильтрации помехи,, и может быть использовано для выделения нестационарной полезной низкочастотной составляющей измеренных сигналов на фоне сравнительно высокочастотных помех со сложными статическими свойствами и наличием эпизодических грубых выбросов-.
Известны нониусные следящие системы, содержащие, например, первый и второй фильтры низкой частоты, последовательно включенные первый, второй и третий блоки сравнения, третий фильтр низкой частоты и сумматор, второй и третий вход которого соединен с выходами соответственно первого и второго фильтров низкой частоты,, выходы фильтров низкой частоты подключены также к вторым входам соответствующих блоков сравнения. -Во.спроизведение входной величины производится по методу последовательных приближений Pj ,
Недостаток но1шусных следящих систем при использовании их в качестве сглаживаюпщх фильтров - низкая точность выделения полезного сигнала из-за того, что не учитываются нестационарные свойства полезного сигнала, и помехи.
Наиболее близким к изобретению по технической сущности является сглаживающий фильтр, содержащий фильтр низкой частоты, включающий последовательно соединенные первый блок сравнения, ограничитель и первьй интегратор, выход которого подключен к
первому входу первого блока сравнения, блок анализа, включающий первый масштабирующий блок, первьш и второй задатчики, последовательно включенныевторой масштабирующий
блок и первый инвертор, последовательно включенные первый детектор знака, первьш блок задержки первый блок умножения, второй блок сравнения, второй интегратор, третий блок
сравнения, третий масштабирующий блок, второй инвертор и первый сумматор, последовательно включенные второй блок задержки, четвертый блок сравнения, второй детектор знака, третий блок задержки, второй
блок умножения, пятьй блок сравне.ния, третий интегратор, шестой блок
сравнения, четвертый масштабирующий
блок и второй сумматор, причем вы3
ходы первого и второго задатчиков подключены к вторым входам соответственно третьего и шестого блоков сравнения, выходы второго и треть-его интеграторов подключены к вторым входам соответственно второго и пятого блоков сравнения, выходы первого и второго детекторов знака подключены к вторым входам соответственно первого и второго блоков умножения, выход третьего блока сравнения соединен через первый масштабирующий блок с вторым входом второго сумматора, выход которого подключен к дополнительному входу ограничителя, выход шестого блока сравнения соединен с входом второго масштабирующего блока, выхо первого инвертора подключен через
первый сумматор к дополнительному входу первого интегратора,выход первого блока сравнения соединен с входом первого детектора знака,выход первого интегратора - с входом второго блока задержки, вторым входом
-четвертого блока сравнения и выходом сглаживающего фильтра, вход которого подключен к второму входу первого блока сравнения.
В сглаживающем фильтре входной сигнал поступает на первый блок сравнения, где из него вычитается выходной сигнал первого интегратора о сглаженном значении входного сигнла. Сигнал о полученной разности ограничивается ограничителем и подается на вход первого интегратора. Остальные блоки сглаживающего фильтра предназначены для адаптации зоны ограничения ограничителя и постоянной времени интегрирования первого интегратора. Адаптация производится по двум показателям: по отклонению регистрируемого сигнала от его сглаженного значения и по скорости изменения оценки полезного (сглаженного) сигнала. Для первого и второго показателей определяются аналоги знаковых автокорреляционных моментов, оцениваются их отклонения от желаемых значений и корректировки зоны ограничения и постоянной интегрирования рассчитываются пропорционально этим отклонениям 2j .
Недостатком сглаживающего фильтра является низкая точность вьщеления полезного сигнала вследствие
492144
сравнительно медленной адаптации параметров сглаживающего фильтра.
Цель изобретения - повышение точности вьщеления полезного сигнала. 5 Поставленная цель достигается тем, что в управляемый фильтр, содержащий первый фильтр низкой частоты, первый и второй блоки сравнения, первый сумматор, первьй блок
0 анализа, включающий третий блок сравнения, последовательно соединенные первый детектор знака; пер. вый блок задержки и первый блок умножения, второй вход которого
5 соединен с выходом первого детектора знака, последовательно включенные второй блок задержки, четвертый блок сравнения, второй детектор знака, третий блок задержки
Q и второй блок умножения, второй вход которого соединен с выходом второго детектора знака, последовательно включенные инвертор и второй сумматор, последовательно
5 включенные пятый блок сравнения и интегратор, выход которого соединен с первым входом пятого блока сравнения, первый вход блока анализа соединен с входом второго блока
Q задержки, вторым входом четвертого блока сравнения и выходом первого фильтра низкой частоты, введены второй фильтр низкой частоты, нелинейный блок, последовательно включенные третий фильтр низкой частоты, третий сумматор, третий блок умножения и четвертый сумматор, последовательно включенные второй блок анализа, пятый сумматор, первый блок деления и четвертый блок зт ожения, последовательно включенные третий блок анализа и второй блок деления, последовательно включенные третий блок деления и пятый блок з множения, причем вход управляемого фильтра соединен с входом первого фильтра низкой частоты, первым входом первого блока сравнения и вторыми входами первого,
второго и третьего блоков анализа, выход первого фильтра низкой частоты соединен с вторым входом четвертого блока умножения, первым входом первого сумматора и через первый
блок сравнения с входом второго
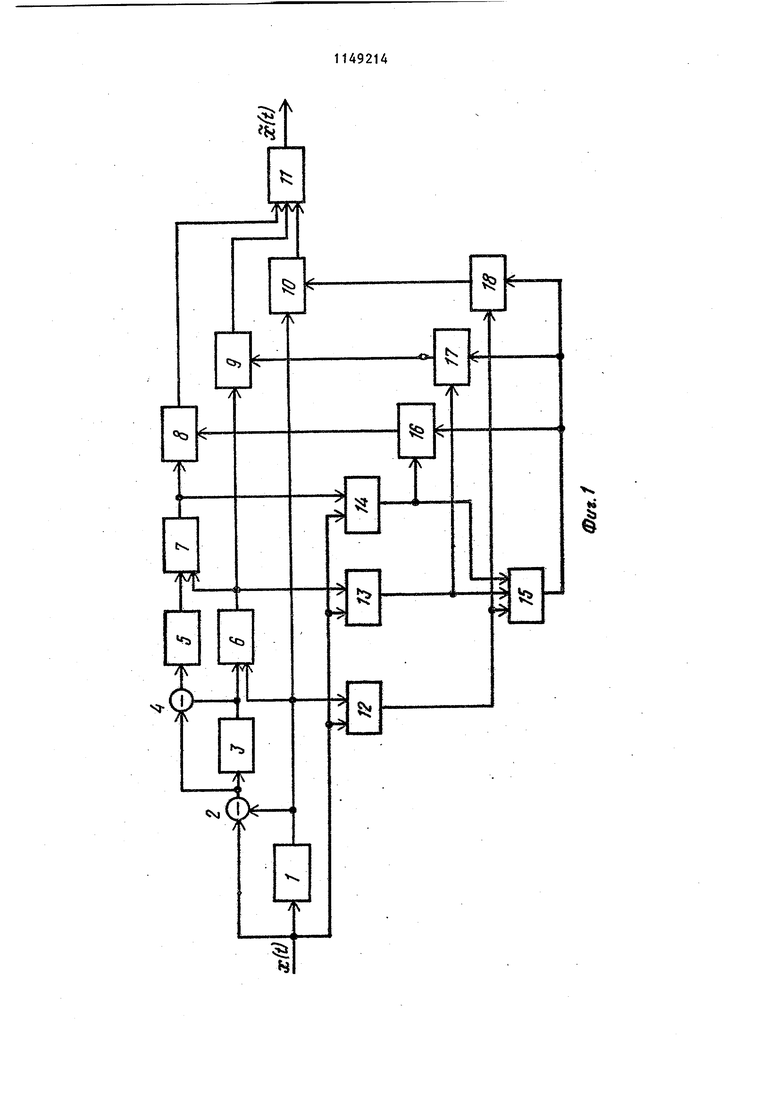
фильтра низкой частоты и первым входом второго блока сравнения, выход второго фильтра низкой частоты подклзочен к второму входу первого сумматора к через второй блок-сравне1ПШ к входу третьего фильтра низкой частоты, выход первого сумматора подключен к первому входу второго блока анализа и к вторым входам третьего сумматора и пятого блока згмиожения, /выход третьего сумматора через третий блок анализа соединен с вторьм входом пятого сз матора, третий вход которого связан с выходом первого блока анализа и вторым входом первого блока деления, выход второго блока анализа подключен к первому входу третьего блока делегшя-, выход пятого сумматора соединен с вторым входом третьего блока деления и через вто. рой блок деления с вторым входом третьего блока умножения, второй и третий входы четвертого сум атора соединены с выходами соответственн пятого и четвертого блоков умножения, выход четвертого сумматора под ключен к вьпсоду управляемого фильтра, второй вход блоков анализа подключен к первому входу третьего блока сравнения, второй вход которого связан с первым входом блоков анализа, а выход - с входом первог детектора знака, выход первого бло умножения соединен с входом инвертора, а выход второго сумматора вторым входом пятого блока сравнен выход второго блока умножения соединен с вторым входом второго сумм тора, выход интегратора подключен 1 рез нелинейньш блок к выходу блока анализа. На фиг.1 представлена блок-схема управляемого фильтра, где x(t) входной сигнал управляемого фильтра, x(t) - выходной (полезный, сглаженный) сигнал; на фиг.2 блок-схема блоков анализа. Управляемый фильтр содержит первый фильтр 1 низкой частоты, включающий последовательно соедине ные блок сравнения, ограничитель в виде„усилителя с насыщением и интегратор вькод которого подключен к входу блока сравнения, первый блок 2 сравнения, второй фильтр 3 низкой частоты, имеющий такую же структуру, как и первый фильтр 1 низкой частоты, второй блок 4 срав нения, третий фильтр 5 низкой частоты, имеющий такую же структуру. 46 как и предыдущие два фильтра, первый 6 и третий 7 сумматоры, третий 8, пятый 9 и четвертьй 10 блоки умножения, четвертый сумматор 11, первый 12, второй 13 и третий 14 блоки анализд пятый сумматор 15, второй 16, третий 17 и первый 18 блоки деления, третий блок 19 сравнения, первый детектор 20-знака, первый блок 21 задержки, первый .блок 22 умножения, инвертор 23, второй блок 24 задержки, четвертьй блок 25 сравнения, второй детектор 26 знака, третий блок 27 задержки, второй блок 28 умножения, второй сумматор 29, пятый блок 30 сравнения, интегратор 31 и нелинейньй блок 32, реализующий кусочно-линейную зависимость. Управляемьй фильтр работает следующим образом. Входной сигнал фильтра x(t) поступает на первый фильтр Т низкой частоты, в котором выделяется низкочастотная составляющая сигнала (t). Сигнал x(t) вычитается в первом блоке 2 сравнения из сигнала x(t), поступающего с входа уп- равляемого фильтра. Сигнал о полученной разности (t) x(t) - x4t) поступает на второй фильтр 3 низкой частоты. Настройки второго фильтра 3 низкой частоты выбираются таким образом,- чтобы его инерционность была в 1,5-2 раза меньше инерционности первого фильтра 1 низкой частоты. Выходной сигнал второго фильтра 3 низкой частоты Дх (t) алгебраически суммируется в первом сумматоре 6 с выходным сигналом первого фильтра 1 низкой частоты. На выходе первого сумматора 6 получается сигнал + ux(t) x(t) о сглаженном на втором уровне входном сигнале ).. Сигнал x(t) содержит более высокочастотные составляющие, чем сигнал x(t) с первого уровня. Аналогично получается сглаженный ХЧ иг сигнал X (t; на третьем уровне. Для этого выходной сигнал второго фильтра 3 низкой частоты вычитается во втором блоке 4 сравнения из выходного сигнала первого блока 2 сравнения. Сигнал о полученной разное (t) сглаживается в третьем фильтре 5 низкой частоты, инерционность которого в 1,5-2 раза меньше инерционности второго фильтра 3 низ кой частоты, и алгебраически ется в третьем сумматоре 7 с выходным сигналом первого сумматора 6. Выходной сигнал х (t) третьего сумматора 7 лШ/ . X (t) X (t) + u к (t) где ux(t) - выходной сигнал третьего фильтра 5 низкой частоты, содерзкит еще более высокочастотные составляющие, чем сигнал х (t). Сглаженные сигналы x(t), х (t) и ) с трех уровней умножаются со ответственно в четвертом 10, пятом 9 и третьем 8 блоках умножения на сигналы об адаптируемых весовых коэффициентах k4t), k (t) и и алгебраически суммируются в четвертом сзт маторе 11, на выходе которого получается сигнал if(ti-kHii Htbk(iix(. Весовые коэффициенты k адаптируются в зависимости от свойств отклонений входного сигнала x(t) от его сглаженнь х значений на каждом уровне и от свойств самих сглаженны сигналов; С этой целью входной сигнал x(t) и сигналы x4t), х (t), ) поступают на первый 12, второй 13 и третий 14 блоки анализа, имеющие одинаковую структуру (фиг, 2). Показатель, характеризующий свойства отклонений x{t) от x(t) где М I, II, III, определяется, например, в первом блоке 12 анализа по выражению (ibx4ti -6i n x a-S)-xHt-t ; где о - интервал времени задержки выбираемый в казвдом конкретном случае при практической настройке фильтра. Показатель f имеет следующие свойства: если имеет место систематическое отклонение х (t) от x(t) положительной или отрицательной величины, то f (tj стремится к +1, если систематическое от клонение отсутствует, то f« (t) стремится к -1. Желаемьы значением показателя f, (t) является -1. Для реализащ и выражения (5) в третьем блоке 19 сравнения из сигнала x(t), поступающего со второго входа первого блока 12 анализа, вычитается сигнал х (t), поступающий с первого входа блока 12 анализа. Сигнал о полученной разности обрабатывается в первом детекторе 20 знака с законом функционирования .е„,.(.и.,п.„„{:;г;/ :;:/ где 6вых (t) и ЕБХ (t) соответственно выходной и входной сигналы детектора знака. С с)1хода первого детектора 20 знака сигнал поступает на первый блок 22 умножении, где умножается на свое же значение, задержанное в первом блоке 21 задержки на интервал времени 2, Показатель, характеризующий свойства полезного сигнала, а именно его гладкость, определяется, например, в первом блоке 12 анализа по выражению e2(t)(f)-x4i-t -si n xHt ob)c(-2J). Показатель S (t) так же, как и f, (t), стремится либо к +1, либо к -1. Однако желаемым значением показателя S (t) является +1, т.е. требуется, чтобы сигнал ) бьш гладким, а значит, и приращения его на соседних з астках были одного знака. Дня реализации вьфажейия (7) сигнал о x(t). с первого входа блока 12 анализа задерживается во втором блоке 24 задержки на интервал времени . Затем выходной сиг-/. нал второго блока 24 задержки вычитается в четвертом блоке 25 сравнения из сигнала x(t) ./Выходной сигнал четвертого блока 25 сравнения обрабатывается с помощью второго детектора 26 знака,, третьего блока 27 задержки и второго блока 28умножения так же,.как и сигнал с выхода третьего блока 19 сравнения. . Показатели fi (t) и g, (t) алгебраически с гммируются.. Предварительно сигнал о ( (t). инвертируется инвертором 23. Это обусловлено тем, что показатели f,(t) и f, (t) имеют разные желаемые значения. Выходной сигнал инвертора 23 поступает на вход второго сумматора 29j где сумьотруется с выходным сигналом второго блока 28 умножения. Полученный сигнал с выхода второго сумм тора 29 подается на пятьй блок 30 сравнения,.в котором из него вычитается выходной сигнал интегратор 31, и сигнал о полученной разности $адет на вход интегратора 31, на выходе которого получается сигнал о сглаженном значении (t) суммы показателей f, (t) и {,t} . Этот сигнал поступает на нелинейный блок 32, в котором реализуется кусочно-мхинейная зависимость, аппрокс мирующая показательную функцию, например, вида А() где А - положительное число. На выходе нелинейного блока 32 получается сигнал, который всегда имеет положительную величину. Весовой коэффициент k (t) рассчи тывается по выражению )) где :-(t), ) и ) - выходные сигналы соответственно перв го 12, второго 13 и третьего 14 блоков анализа. Для этого выходные сигналы блок анализа суммируются в пятом сумматоре 15, сигнал с выхода которого по-35эффект порядка 150 тыс. руб. в год
дается на вход первого блока 18 де-за счет уменьшения удельного расления, в котором производится опера-хода кокса на 0,3-0,5% и увеличецйя деления выходного сигнала E(t)ния производительности печи на
первого блока 12 анализа на выход-0,6-0,8%. ной сигнал пятого сумматора 15. Вькодной сигнал первого блока 18 деления о величине k(t) подается на второй вход четвертого блока 10 умножения. Таким же образом определяются весовые коэффициенты k(t) и )j для чего используются третий 17 и второй 16 блоки деления, В описанном управляемом фильтре дано три уровня сглаживания. По аналогии может быть построен управляемьй фильтр и с болышм числом уровней. Введение в управляемый фильтр нескольких уровней сглаживания с разными динамическими свойствами позволяет более оперативно отслеживать быстрые изменения полезного сигнала, например, импульсноподобного типа, что повышает точность его выделения. Из результатов моделирования следует, что среднеквадратическое отклонение оценки полезного сигнала от его действительного 1 значения для предлагаемого управляемого фильтра на 8-12% меньше, чем для известного фильтра. Исполь- . зование управляемого фильтра в системах прогнозирующего управления ведет к увеличению точности регулирования на 0,5-1%. Это в свою очередь дает, например, при регулировании теплового и шлакового режима доменной печи экономический
$
5
/V
/ч
-$ Г
ЖЖ
н
/ч
5
/ч
ь
C4J
н
г
1
1
м
S)
е
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Осмоловский П.Ф | |||
| Комбинированные измерительные следящие системы | |||
| Теория инвариантности в системах автоматического регулирования | |||
| М., Наука, 1964, с | |||
| Ручная тележка для грузов, превращаемая в сани | 1920 |
|
SU238A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР по заявке № 3355655/09, кл | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
