М
00 9д
1и
Изобретение относится к области информационно-измерительной техники и может найти широкое применение для точных измерений линейных ускорений ускорений силы тяжести и параметров движения объектов.
Известны высокочувствительные акселерометры с электрической силовой компенсацией, использующие электростатическую подвеску и предназначенные для измерения градиентов силы тяжести Qj,
Недостатком данных акселерометров является узкий рабочий диапазон.
Наиболее близким к изобретению по технической сущности и достигаемому результату является устройство емкостного акселерометра с электро- статической силовой компенсацией .
Однако известный акселерометр при высокой точности измерения характеризуется малыми значениями ускорений не более 10 -10 g, что в значительной мере ограничивает возможности его применения. Кроме того, для него присущи низкие помехоустойчи-i вость и механическая прочность.
Целью устройства является увеличение верхнего предела измерения ускорений на два порядка и более за счет частичной компенсации усилия, создаваемого измеряемым ускорением, и повьшение помехоустойчивости.
Поставленная цель достигается тем, что в емкостной акселерометр, содержащий два неподвижных электрода и один подвижный электрод на упругом подвесе, схему уравновешивания с дифференциальным емкостным датчиком перемещения и усили- телем-демодулятором, схему вычитания напряжений, модулятор и ключ, в центральном отверстии подвижной пластины в ее плоскости перпендикулярно оси чувствительности акселерометра установлены подвижный постоянный магнит и неподвижная катущка причем выход схемы уравновешивания через ключ соединен с неподвижными электродами, а токовый выход модулятора соединен с неподвижной катущкой.
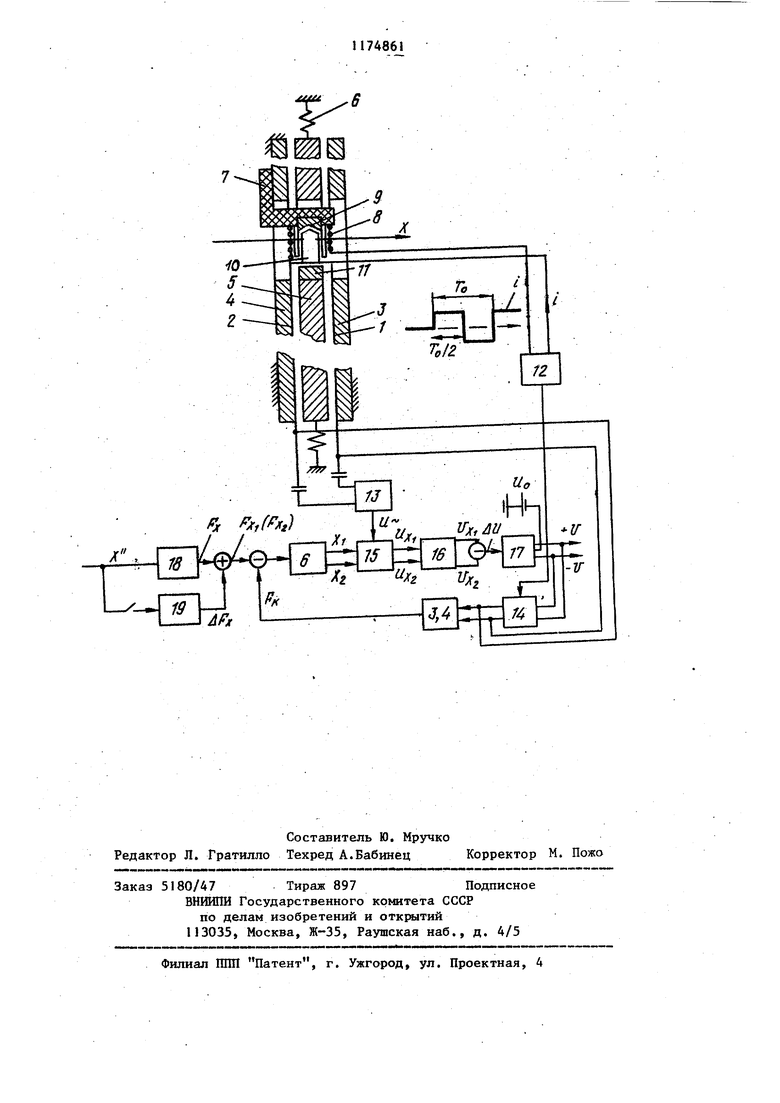
На чертеже приведена конструкция емкостного акселерометра и структурная схема.
Между двумя неподвижными изолированными от корпуса пластинами 1
612
и 2 с электродами 3 и 4 расположена подвижная пластина 5 с электродами, закрепленная на упругом подвесе 6. В центральной части пластин выполнены отверстия и на скобе 7 установлена микрокатушка 8, в основании которой расположен фиксирующий упор 9. Внутри каркаса катушки 8 расположен микромагнит 10.
С другой стороны микромагнита на подвижной пластине 5 с края отверстия установлен второй фиксирующий упор 11.
Микрокатушка 8 соединена с токовым выходом модулятора 12. Неподвижные электроды 3 и 4 через разде- лительные емкости С соединены с выходом высокочастотного генератора 13, а через потенциальный ключ 14 с выходом схемы уравновешивания. Генератор 13 дифференциальную схему емкостного моста 15, преоОразующую перемещение в электричес,кий сигнал, который усиливается
усилителями 16 и 17.
Емкостной акселерометр работает следукяцим образом.
В исходном СОСТОЯНИЙ в первый полупериод модуляции Тр/2 микромагнит 10 удерживается в крайнем верхнем -положении на упоре 9 при положительном импульсе тока i в катушке 8. В это время ключ 14 разомкнут. Измеряемое ускорение X
воздействует на массу га подвижной пластины 5 ( блок 18) и преобразуется в силу . Сила F вызывает смещение X, пластины 5 за счет деформации упругого подвеса 6. Смещение K. преобразуется емкостным датчиком 15 перемещения в электрический сигнал Ui)( , который усиливается уси лителем 16 до напряжения U/. I
Во втором полупериоде модуляции
формируется отрицательный импульс
тока, выталкивающий из катушки микромагнит, который садится на фиксирующий упор 11 подвижной пластины 5. Инерционная чувствительная масса уве-личивает свое значение на величину массы микромагнита Д га ( блок 19), чему соответствует большее значение входной силы , +AF). Усилие Fу преобразуетсяв перемещение Х-,
а затем - в напряжение Ujj U)( +iU. На выходе усилителя 17 с помощью, например, разделительного конденсатора осуществляется вычитание постоян- ной составляющей напряжения Uy, « присутствуклцей в обоих полупериодах модуляции, и вьвделение модуляционно составлякяцей, характеризуемой нулев значением в первьй полупериод модуляции и значением &U во второй полупериод модуляции. Модуляционная соетавляннцая напряжения усиливается в усилителе 17 до значения напряжения U, /которое через замкнутый во втором полупериоде ключ 14 подводит ся вместе с постоянным напряжением Ujj .к электродам 3 и 4. Напряжение создает электростатическое усилие Ч F SU|jU, где 6 - диэлектрическая проницаемость, S - площадь электродов, которое с точностью до величины некомпенсации ЛР уравновешивает усилие А F)f. :При полном коэффициенте преобразования контура уравновешивания ., К К-/3 10 х F -1 -2-i OiM п ,- Шо где 8р - начальный зазор между электродами. При SQ 0,5 мм, см, в и при массе Д та 0,05 г номинальная величина компенсирующего ускорения X f,| составляет величину порядка ±0,0Ig. При значении массы подвижной пластины m 5 г в предлагаемом акселерометре предел измерения увеличивается на два порядка, так как увеличивается диапазон измерения на два порядка и более. При этом точность измерения сохраняете прежней. Как следует из основного уравнения преобразования акселерометра, погрешность чувствительности определяется стабильностью параметров емкостного обратного преобразователя и практически не зависит от жесткости упругого подвеса, коэффициентов преобразования датчика перемещения и усиления. Таким образом, существенное в т,, 10 раз увеличение пределл измерения компенсационного акселерометра осуществляется беч снижения его точности, поскольку погрешность входного коэффициента практически равна нулю. й niQ Зазор между мнкромагнитом и упорами составляет неболыоую величину Д О, 1-0,2 мм.Переходные процессы и время задержки установки и снятия с подвижной пластины мнкромагнита составляет единицы миллисекунд tf менее, что позволяет с достаточной точностью выбрать частоту модуляции порядка нескольких десятков герц. 6
| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитоэлектрический динамометр | 1984 |
|
SU1182285A1 |
| Магнитоэлектрический динамометр | 1984 |
|
SU1174790A1 |
| Акселерометр | 1979 |
|
SU883745A1 |
| Акселерометр | 1982 |
|
SU1059513A1 |
| Емкостный акселерометр | 1987 |
|
SU1530999A1 |
| Весы с электромагнитным уравновешиванием | 1986 |
|
SU1394055A1 |
| АКСЕЛЕРОМЕТР | 2012 |
|
RU2514150C1 |
| Акселерометр | 1980 |
|
SU901916A1 |
| Угловой акселерометр | 1983 |
|
SU1138749A1 |
| Магнитоэлектрический динамометр | 1978 |
|
SU734512A1 |
ЕМКОСТНОЙ АКСЕЛЕРОМЕТР, -( содержащий два неподвижных электрода и один подвижный электрод на упругом подвесе, схему уравновешивания с дифференциальным емкостным датчиком перемещения и усилителемдемодулятором, схему вычитания напряжений, модулятор и ключ, отличающийся тем, что, с целью увеличения верхнего предела измерения ускорений и повышения помехоустойчивости, в центральном отверстии подвижной пластины, в ее плоскости перпендикулярно оси чувствительности акселерометра установлены подвижный постоянный магнит и неподвижная катушка, причем вькод схемы уравновешивания через ключ соединен с неподвижными электродами, а токовый выход модулятора соединен с не« подвижной катушкой.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США № 3229530, кл | |||
| Способ подготовки рафинадного сахара к высушиванию | 0 |
|
SU73A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
