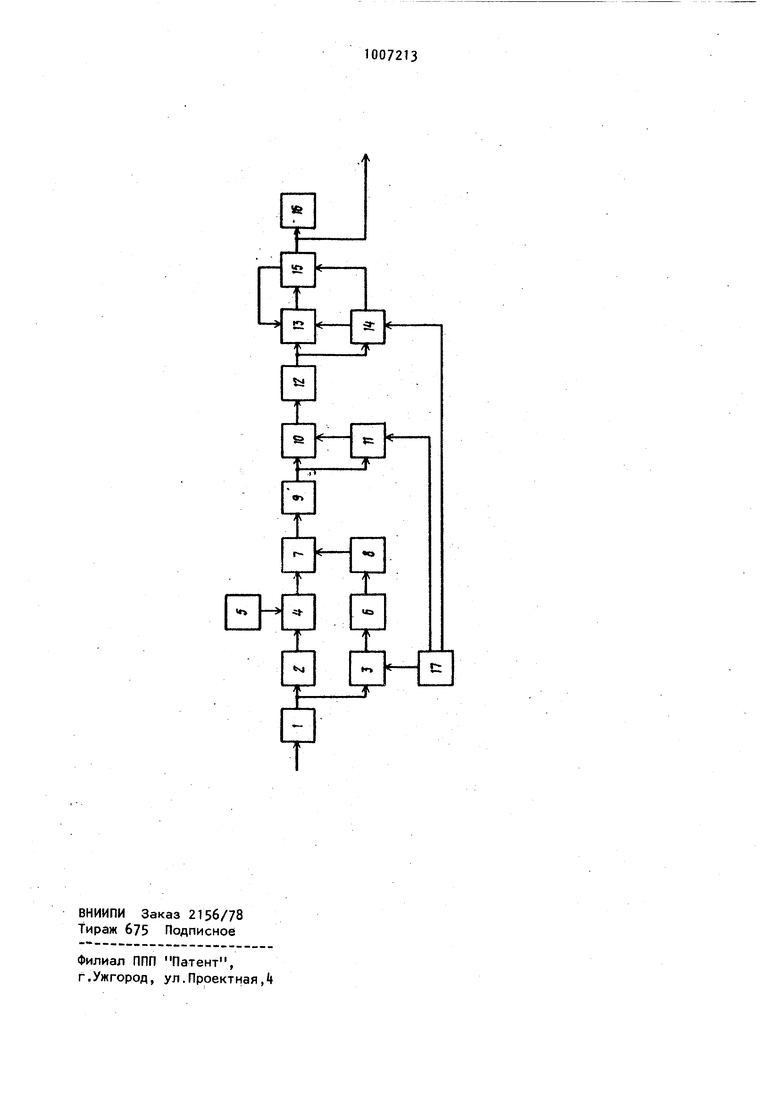
.1 . 10 Изобретение относится ктехнике электросвязи и может использоваться при приеме модулированных сигналов дискретной информации, передаваемой по каналам связи. Известно устройство для приема ди ретной информации, содержащее усилитель с азтоматической регулировкой усиления, выход которого подключен к входу режекторного фильтра пилХ т-си1- нала и к первому входу преобразовате ля частоты пилот-сигнала, второй вход и .выход которого соединены соответственно с первым выходом формирователя опорных частот и с входом п лосового фильтра пилот-сигналд.и посл довательно соединенные преобразовател частоты сигнала данных,полосовой филь демодулятор,фильтр низкой частоты,адa тивный корректор межсимвольных искаже ний и решающий блок,выходы которого подключены к входу блока оценки качес ва и к второму входу адаптивного кор ректора межсимвольных искажений,трети вход которого соединен с первым выходом блока выделения тактовых импульсо входы (Которого соединены с выходом фи льтра низкой частоты и с вторым выходом формирователя опорных частот, третий выход которого подключен к первому входу блока выделения когерентного колебания, второй вход и выход которого соединены соответственно с выходом полосового фильтра и с вторым входом демодулятора, а второй выход блока выделения тактовых импульсов подключен к второму входу решающего блока СООднако известное устройство имеет низкую помехоустойчивость. Цель изобретения - повышение помехоустойчивости путем уменьшения влияния фазового дрожания и скачков Для этого в устройство для приема дискретной информации, содержащее усилитель с автоматической регулировкой усиления, выход которого по ключен к входу режекторного фильтра пилот-сигнала и к первдму входу преобразователя частоты пилот-сигнала , второй вход и выход которого соединены соответственно с первым выходом формирователя опорных частот и с входом полосового фильтра 1иЛот-сигнала, и последовательно соединенные преобразователь частоты 32 сигнала данных, полосовой фильтр, демодулятор, фильтр низкой частоты, адаптивный корректор межсимвольных искажений ;и решающий блок, выходы которого подключены к входу блока оценки качества и к второму входу адаптивного корректора межсимвольных искажений, третий вход которого соединен с первым выходом блока выделения тактовых импульсов, входы которого со динены с выходом фильтра низкой частоты и с вторым выходом формирователя опорных частот, третий выход которого подключен к первому входу блока выделения когерентного колебания, второй вход и выход которого соединены соответственно с выходом полосового фильтра и с вторым входом демодулятора, а второй выход блока выделения тактовых импульсов подключен к второму входу решающего блока, введены блок регулирования, управляемый элемент задержки и ограничитель пилот-сигнала вход и выход которого соединены соответственно с выходом полосового фильтра пилот-сигнала и с первым входом преобразователя частоты сигнала данных, к второму входу которого подключен выход управляемого элемента задержки, информационный и управляющий входы которого соединены соответственно с выходом режекторного фильтра пилот-сигнала и с выходом блока регулирования. На чертеже представлена структурная электрическая схема предложенного устройства. Устройство для приема дискретной информации содержит усилитель 1 с автоматической регулировкой усиления, режекторный фильтр 2 пилотсигнала, преобразователь 3 частоты пилот-сигнала, управляемый элемент задержки, блок 5 регулирования, полосовой фильтр 6 пилот-сигнала, преобразователь 7 частоты сиг,нала данных, ограничитель 8 пилотсигнала, полосовой фильтр 9, демодулятор 1Q, блок 11 выделения когерентного колебания, фильтр 12 низкой частоты, адаптивный корректор 13 межсимвольных искажений, бло| 14 выделения тактовых импульсов, решающий блок 15, блок 16 оценки качества, формирователь 17 опорных частот. Устройство работает следующим образом. Принимаемый сигнал усиливается усилителем 1 с автоматической регулировкой усиления (АРУ) и поступает на режекторный фильтр 2 пилот- . оигнала, а также через преобразователь 3 частоты пилот-сигнала на полосовой фильтр 6 пилот-сигнала. На другой вход преобразователя 3 частоты пилот-сигнала поступает вспомогательная частота от форкм ователя 17 опорных частот. Режекторный фильтр 2 пилот-сигна ла подавляет частоту пилот-сигнала и пропускает на вход управляемого элемента задержки .модулированный :сигнал данных, а полосовой фильтр 6 пилот-сигнала выделяет сигнал, частота которого равна разности частоты пилот-сигнала, передаваемого по каналу связи и вспомогательной частоты преобразования. С выхода режекторного фильтра 2 пилот-сигнала через управляемый эле мент 4 задержки модулированный сигнал данных поступает на первый вход преобразователя 7 частоты сигнала данных, на другой вход которого подается выходной сигнал полосового фильтра 6 пилот-сигнала через ограничитель 8 пилот-сигнала. Полосовой фильтр 9, подключенный к выходу преобразователя 7 частоты сигнала данных, выделяет сигнал с частотой, равной сумме 1 частот сигналов, поступающих на преобразователь 7. С выхода полосового фильтра 9 сигнал подается на демодулятор 10 и блок 11 выделения когерентного колебания. На другой вход демодулятора 10 подается когерентное коле бание с выхода блока 11 выделения коге;рентного колебания. Фильтр 12 низкой частоты выделяет демодулированный сигнал и подавляет пара;э;итные продукты демодуляции. Сигнал с выхода фильтра 12 низ кой частоты поступает на адаптивный корректор 13 межсимвольных искажений и блок 1А выделения тактовых им пульсов. Выходной сигнал адаптивного корректора 13 межсимвольных искажений подается на решающий блок 15. Тактовые серии, необходимые для рабо ты адаптивного корректора 13 межсимвольных искажений, и решающий блок 15 поступают с выхода блока Т выделения тактовых импульсов. Решающий блок 15 восстанавливает информационный сигнал, а тёкже управляет адаптивным корректором 13 межсимвольных искажений и блоком 16 оценки качества. Частоты, необходимые для работы блока 11 выделения когерентного колебания и блока Н выделения тактовых импульсов, поступают на них с выходов формирователя 17 опорных частот. Блок 5 определяет величину задержки и управляется по показателям блока 16 оценки качества вручную или автоматически. Для большинства каналов связи проводных, радио-релейных и спутниковых линий связи свойственно явление фазового дрожания При этом фазы сигналов, передаваемых по этим каналам, изменяются по закону этого дрожания. В системах передачи данных, использующих для раЬоты приемников пилот-сигналы, отделение пи- , лот-сигналов от основного сигнала осуществляется узкополосными (jwnbrрами. Закон фазового дрожания пилотсигнала на выходе подобного фильтра при правильно выбранных характеристиках фильтра, полосе частот, равномерности АЧХ и ФЧХ, повторяет закон фазового дрожания пилот-сигнала на входе, по претерпевает запа дывание во времени, которое определяется групповым временем запаздывания этого фильтра. В токе время, основной сигнал данных с подавленным, например, с помощью режекторного фильтра пилот-сигналом претерпевает в приемнике незначительное запаздывал ние. Дальнейшее использование пилот-сигнала с целью устранения сдвига частоты, вносимого в сигнал каналом связи, как это сде}1ано в известном устройстве, приводит за счет неравного запаздывания к увеличению фазового дрожания основного сигнала. В пределе амплитуда дрожания фазы основного сигнала может увелйчит{|с{|:1вдвое. При высокой удельной скорости передачи помехоустойчивость приема при этом резко падает и передача информации реально прекращается. В предложенном устройстве этот отрицательный эффект устраняется за счет компенсации фазового дрожания сигнала данных фазовым дрожанием пилот-сигнала и Для этой цели сигнал данных, в котором с помощью.режек51торного фильтра 2 подавлен пилот-си нал, задерживается на время, равное задержке пилот-сигнала в тракте его выделения. Пилот-сигнал, в свою очередь, подвергается преобразованию с целью изменения знака аргумента его временной функции. Задержка . сигнала данных осуществляется управляемым элементом k задержки. Изменение знака аргумента временной функции пилот-сигнала осуществляется путем преобразования частоты U.p этого сигнала. Частота преобразования , вырабатываемая формирователем 17 опорных частот, выбирается из условия )j.B результате преобразования выделяется полосовым фильтром 6 пилот-сигнала разност ный продукт tOpp - U)j. Если в канале связи имеют место сдвиг частоты на ±&ш, фазовое дрожание MCt) и скачок фазы Ф , то в аргументе временной функции преобразованного пилотсигнала на выходе полосового фильтра 6 пилот-сигнала все эти состав-, , ляТощие аргументы имеют обратный %()(-Тз):()-ф(С-Сз)Д1) где Т,. время задержки полосового фильтра 6 пилот-сигнала;преобразованная часто п пp- «hта пилот-сигнала; ф (T-fj) - скачок фазы на выходе полосового фильтра 6 пилот-сигнала, запаздывающий на время Т и имеющий переходной процесс с временем ус тановления Т . Аргумент временной функции модулированного сигнала данных на выходе режекторного фильтра 2 пилотсигнала имеет вид: U(t)+ДU)(t)(t) + Ф. Если в сигнал данных внести с помощью регулируемой линии задержки запаздывание Тз, то выражение (2) преобразуется:Ш.(1-Т)±ДШ (-Тз)+Ч(-Тз)1-ФТз , (3) где Ф -.скачок фазы, задержанный на время Т. 13 В предложенном устройстве оба сигнала (1) и {З) подаются на преобразователь 7, с выхода которого выделяется полосовым фильтром 9 суммарнь1й продукт преобразования. Аргумент сигнала на выходе полосового фильтра 9 имеет вид: c(t -Тз) где Ыс, + и;,. Ф/1- - ct, скачок фазы с временем установления С . Очевидно, что при истечении времени t второй член в выражении (Ц) равен нулю. Таким образом, из (4) следует, что фазовое дрожание сигнала данных компенсируется, а интервал времени влияния скачка фазы, вызванного каналом связи сокращается на величину Т фазы. Учитывая, что паразитные скачки фазы, вносимые в передаваемые по каналам связи сигналы, приводят к большим пакетам ошибок, уменьшение интервалов времени влияния скачка фазы также является положительным эффектом .Пилот-ckjrнал обычно передают в свободных от основного сигнального спектра участке диапазона частот канала связи. Это, как правило, краевые участки диапазона, Групповое время запаздывания (ГВЗ) краевых участков диапазона обычно превышает ГВЗ центральной части диапазона канала связи. Для выравнивания этой неравномерности применяют коррекцию канала связи в аппаратуре передачи данных. Однако коррекция ГВЗ канала обыч-. но достаточно грубая. Для глубокой компенсации фазового дрожания необходимо учесть разницу в ГВЗ основного спектра сигнала данных и ГВЗ в , диапазоне частот пилот-сигнала. Для этой цели вводится управляемый элемент 4 задержки . Регулирование времени задержки выполняется блоком 3. Критерием дЛя ручного или автоматического регулирования выбрана максимизация оценки качества, производимая блоком 16 оценки качества. Учитывая также, что величина остаточного,, затухания краевых участков диапазона канала связи может колебаться в значительных пределах, в предложенном устройстве введен ограничитель уровня пилот-сигнала. Этим
,710072138
обеспечиваетсл нечувствительность Таким образом, введение новых тракта выделения пилот-сигнала к элементов позволяет значительно inoуровню этого сигнала на входе прием- высить помехоустойчивость предложен , ника.ного устройства.

| название | год | авторы | номер документа |
|---|---|---|---|
| Приемник многоуровневого фазоманипулированного сигнала | 1983 |
|
SU1146826A1 |
| Цифровой приемник многопозиционных сигналов | 1982 |
|
SU1062890A1 |
| РАДИОМОДЕМ | 2024 |
|
RU2830959C1 |
| Устройство преобразования сигналов для передачи данных по первичному сетевому тракту | 1989 |
|
SU1739503A1 |
| Устройство для приема сигналов с адаптивной коррекцией межсимвольной интерференции | 1979 |
|
SU866757A1 |
| ЦИФРОВОЙ АДАПТИВНЫЙ ПРИЕМНИК ДИСКРЕТНЫХ СИГНАЛОВ | 1991 |
|
RU2039416C1 |
| Устройство для приема дискретной информации | 1978 |
|
SU790358A1 |
| Приемник цифрового сигнала | 1985 |
|
SU1298948A1 |
| Адаптивный корректор фазомодулированных сигналов | 1976 |
|
SU649142A1 |
| Устройство для адаптивного приема цифровых однополосных сигналов | 1989 |
|
SU1663776A2 |
2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США № , кл | |||
| Водяной двигатель | 1921 |
|
SU325A1 |
