Изобретение относится к технике электросвязи и может использоваться для приема сигналов данных, передаваемых двухполосними и однополоными МНОГОПОЗИЦИОННЫГ-1И методами модуляции.
Известен приемник, состоящий из последовательно соединенных входного блока, демодулятора, цифрового адаптивного корректора, блока коррекции фазы и решающего блока, выход которого подключен к другому входу цифрового адаптивного корректора, второй выход решающего блока через блок выделения тактового колебания подключен к другому входу демодулятора, третий выход решающего блока через блок управления фазой подключен к другому входу блока коррекции фазы, выход которого подключен к декодировщику .
Однако данный приемник рассчи,тан на прием сигналов данных, пе1:1еяаваемых только двухполосными методами модуляции. Кроме того, при подстройке тактового колебания Недостаточно полно учитывается структура принимаемого сигнала, что естественно, снижает помехоустойчивость приёма сигналов данных. Наиболее близким техническим реи/ением к изобретению является цифровой приемник многопозиционных сигналов, содержащий последовательно соединенные полосовой фильтр и усилитель с автоматической регулировкой усиления, выход которого подключен к первым входам первого и втрого демодуляторов, вторые входы и выходы которых соединены соответсвенно с выходами блока выделения несущего колебания и с первыми входами первого и второго аналогоцифровых преобразователей, к вторым входам которых подключены выходы блока вьщеления тактового колебания а выходы первого и второго аналогоцифровых преобразователей соединены с входами цифрового адаптивног корректора, выходы которого подключены к входам решающего блока 2 . Одйако известны приемник имеет низкую помехоустойчивость приема даных, передаваемых однополосными и двухполосными методами модуляции. Цель изобретения - повышение помехоустойчивости приема данных, передаваемых однополосными и двухполосными методами модуляции.
Поставленная цель достигается тем, что в цифровой приемник многопозиционных сигналов, содержащий последовательно соединенные полосовой фильтр и усилитель с автоматической регулировкой усиления, выход которого подключен к первнлм входам первого и второго демодуляторов, вторые входы и выходы которых соединены соответственно с выходами блока выделения несущего колебания и с первыми входами первого и второго аналого-цифровых преобразователей , к вторым входам которых подключены выходы блока выделения тактового колебания, а вы:ходы первого и второго аналого-цифровых преобразователей соединены с входам цифрового адаптивного корректора, выходы которого подключены к входам решающего блока введены два элемент задержки и последовательно соединенные блок постоянной памяти и блок вьочитания, выход которого подключен к входу блока выделения тактового колебания, дополнительный выход которого соединен с первыми входами блока постоянной памяти и первого и второго элементов задержки, вторые входы которых соединены с соответствующим выходом цифрового адаптивного корректора и с вторым входом блока постоянной памяти,к третьему входу которого подключен выход первого элемента задержки, при этом выход второго элемента задержки соединен с вторым входом блока вычитания.
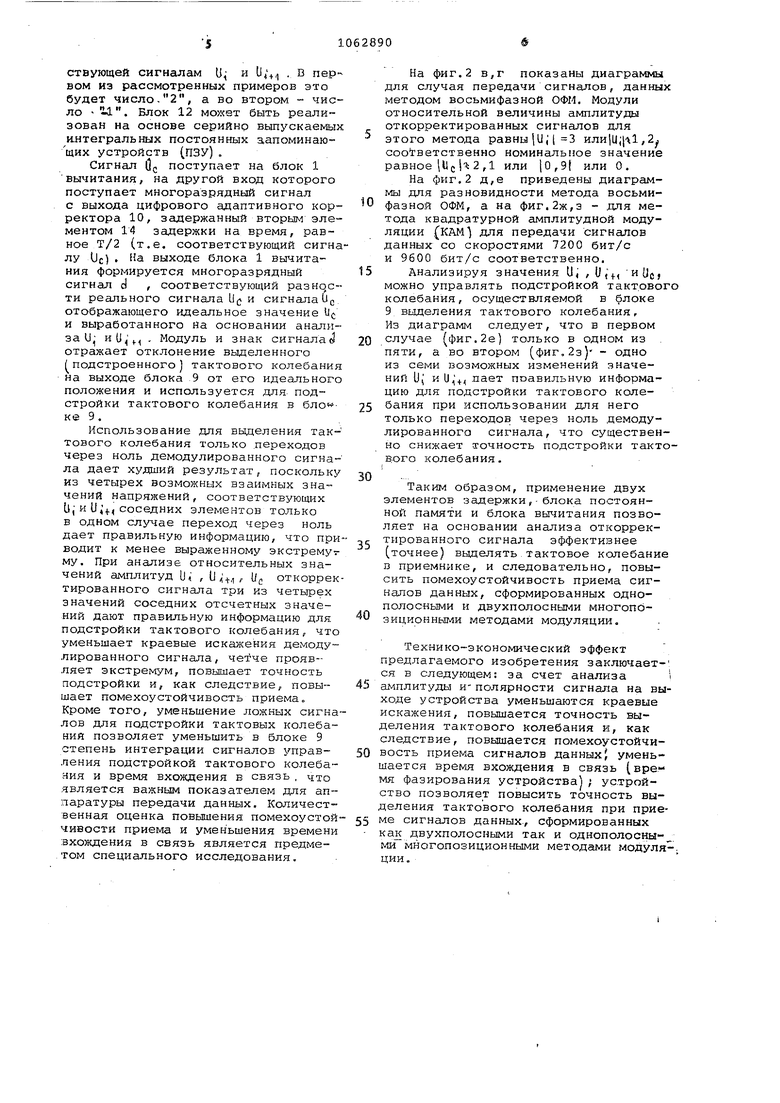
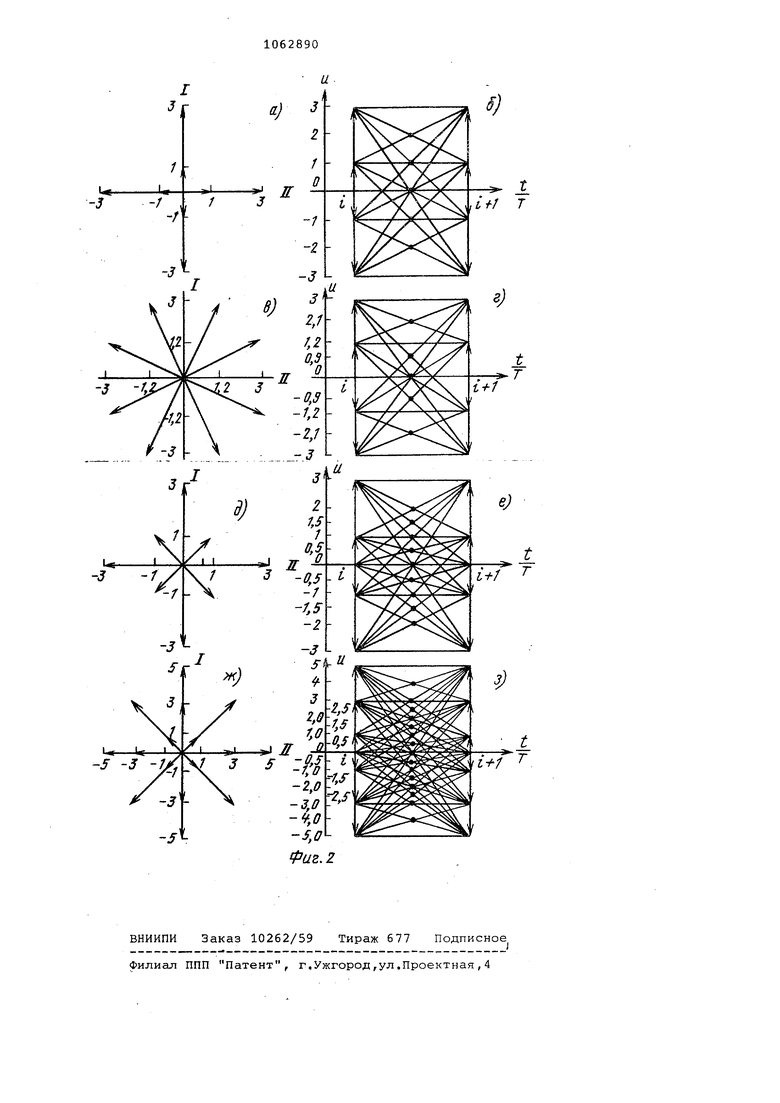
На фиг.1 представлена блок-схема предлагаемого приемникаJ на фиг.2векторные диаграммы, поясняющие алгоритм подстройки тактового колебания для различных многопозиционных методов модуляции.
Цифровой приемник многопозицнонных сигналов содержит блок 1 вычитания, полосовой фильтр 2, усилитель
3с автоматической регулировкой уси ления, первый и в.торой демодуляторы
4и 5 соответственно, блок 6 вгдделения несущего колебания, первый и второй аналого- цифровые преобразователи 7 и 8 соответственно, блок 9 выделения тактового колебания, цифровой адапт4- вный корректор 10, решащий блок 11, блок 12 постоянной памяти, первый и второй элементы 13
и 14 задержки соответственно.
Цифровой приемник многопозиционных сигналов работает следующим образом.
Модулированный сигнал данных, поступающий на вход цифрового приемника многопозиционных сигналов ограничивается по спектру полосовым фильтром 2, В усилителе 3 входной сигнал стабилизируется по уровню и затем поступает на первый и второй демодуляторы 4 и 5, на другие входы которых из блока б выделения несущего колебания подаются сдвинутые по фазе друг относительно друга на 90° несущие колебания.
Демодулированные сигналы с выходов первого и второго демодуляторов 4 и 5 поступают в первый и второй аналого-цифровые преобразователи 7 и 8 соответственно, где осуществляется стробирование демодулированных аналоговых сигналов в отсчетные моменты времени, соответствующие серединам принимаемых линейных элементов сигнала, запоминание и хранение амплитуд полученных напряжений выборок и преобразование этих напряжений в П -разрядные двоичные кодовые числа. Импульсные последовательности, по которым осуществляется стробирование и преобразование демодулированных сигналов, поступают из блока 9 выделения тактового колебания, С выходов первого и второго аналого-цифровых преобразователей 7 и 8 два П -разрядных кодовых числа подаются в цифровой адаптивный корректор 10, в котором осуществляется минимизация межсимвольной интерференции в принимаемых сигналах данных, обусловленная неравномерностью частотных характерис тик канала связи. Откорректирован, ный сигнал, в виде многоразрядных кодовых чисел поступает в решающий блок 11 и далее на выход.
На одном из выходов цифрового адаптивного корректора 10, с целью повышения точности выделения тактового колебания, формируются не только многоразрядные двоичные сигналы, соответствующие отсчетным значениям, но также и дополнительные многоразрядные двоичные сигналы, соответствующие серединам между соседними отсчетными значениями (т.е. границам принимаемых элементов сигнала).
Алгоритм подстройки тактового колебания поясняется векторными диаграммами (фиг.2а-2з) , приведенными для различных многопозиционных методов модуляции.
На фиг.2а представлена диаграмма для метода четырехпозиционной комбинированной амплитудной и относительной фазовой модуляции с частично подавленной одной боковой полосой частот (лОФМ ОБП), используемого для передачи сигналов данных со скоростью 4800 и 9600 бит/с при приеме (демодуляции) на центральной частоте спектра передаваемого сигнала. При этом передачу и прием АОФМ ОБП сигналов можно рассматривать как поочередную передачу элементов сигнала с половинной скоростью на двух взаимно ортогональных несущих колебаниях, частота которых равна центральной частоте спектра. В этом случае, если принимаемый элемент сигнала регистрируется относительно первого несущего колебания, то следующий элемент сигнала должен регистрироваться относительно второго, ортогонального первому, несущего колебания. При этом откорректированный сигнал на
выходе цифрового адаптивного корректора 10 формируется на основании анализа этой пары принимаемых линейных элементов. Относительная величина амплитуды откорректированног сигнала при методе ЛОФМ ОПП может быть большой (З или - з) или малой (1 или -1) . Hc фиг. 26 показаны возможные значения откорректированного сигнала в соседние i и i +1 отсчетные моменты, а точками показана возможная амплитуда откорректированного сигнала в моменты, соответствующие середине между соседними отсчеными значениями. Так, например, если в момент времени относительное значение амплитуды сигнала равно и,3, а в ( +1 момент времени оно стало и ,, 1, то относительное значение амплитуды сигнала в момент, сооветствующий середине между ними, равно УС 2. Аналогично, если О, 1, ,-3, то (. -1 и т.д. В случае
.неоптимального положения моментов стробирования , т., е , неоптимально выделенного (подстроенного) тактового колебания, величина L/g отличается от требуег-юй. Предположим, что моменты стробирования сместились влево, тогда в первом из рассмотрен ных на фИ1;25 случаев, когда (J, 3 иО/. 1, модуль относительной величины (0(,, а для второго случая, когда и,- 1 -3 модуль относительной величины lUfl 1 и т.д.
Таким образом, анализируя аг/тлитуды и полярности сигналов У/ (1 и 11(л , можно однозначно определить как должна подстраиваться частота и фаза местного тактового колебания. В предложенном техническом решении для выделения тактового колебания используются не только переходы демодулированного сигнала через ноль, но также амплитуды и полярнос сигналов U, , U,Vi / IJc г что повышает точность его подстройки. Реализуется это следующим образом.
Многоразрядное двоичное кодовое число с выхода цифрового адаптивнс5го корректора 10 задерживается первым элементом 13 задеряки на время, равное периоду (т) следования элементов демодулированного сигнала. Задержанный сигнал с выхода первого элемента 13 задержки поступает на блок 12 постоянной памяти. Кроме того, на другой вход блока 12 поступает многоразряддное число непосредственно с выхода цифрового адаптивного корректора 10. Таким образом, на входы блока 12 поступают сигналы, соотгзетствующие О, ., . Эти многоразрядные числа образуют адрес, по которому в блоке постоянной па;.5яти записано многоразрядное число U. , г-ютвстствУющее идеальной величин if,- , соответствующей сигналам 1 и - первом из рассмотренных примеров это будет число.2, а во втором - число - W. Блок 12 может быть реализован на основе серийнр выпускаемых антегральных постоянных аапоминающих устройств (ПЗУ)
Сигнал Qj поступает на блок 1 вычитания, на другой вход которого поступает многоразрядный сигнал с выхода цифрового адаптивного корректора 10, задержанный вторым элементом 14 задержки на время, равное Т/2 (т.е. соответствующий сигналу Uc) . Ja выходе блока 1 вычитания формируется многоразрядный сигнал d , соответствующий pasHqcти реального сигнала И и сигнала Ug. отображающего идеальное значение У,; и выработанного на основании анализа U (i . Модуль и знак сигнала отражает отклонение выделенного /подстроенного) тактового колебания на выходе блока 9 от его идеального положения и используется для подстройки тактового колебания в 9.
Использование для выделения тактового колебания только .переходов через ноль демодулированного сигнала дает худший результат, поскольку из четырех возможных взаимных значений Напряжений, соответствующих Ь,и ., соседних элементов только в одном случае переход через ноль дает правильную информацию, что приводит к менее выраженному экстремуг му. При анализе относительных значений амплитуд Ui , iJ(4.if откорректированного сигнала три из четырех значений соседних отсчетных значений дают правильную информацию для подстройки тактового колебания, что уменьшает краевые искажения демодулированного сигнала, четче проявляет экстремум, повышает точность подстройки и, как следствие, повышает помехоустойчивость приема,, Кроме того, уменьшение ложных сигналов для подстройки тактовых колебания позволяет уменьшить в блоке 9 степень интеграции сигналов управления подстройкой тактового колебания и время вхождения в связь , что является важным показателем для аппаратуры передачи данных. Количественная оценка повышения помехоустойчивости приема и уменьшения времени вхождения в связь является предметом специального исследования.
На фиг.2 в,г показаны диаграммы для случая передачи сигналов, данны методом восьмифазной ОФМ. Модули относительной величины амплитуды откорректированных сигналов для этого метода равны|и, или|и;1 1,2у соответственно номинальное значение равное 2,1 или {0,91 или 0.
На фиг.2 д,е приведены диаграммы для разновидности метода восьмифазной ОФМ, а на фиг.2ж,з - .для метода квадратурной амплитудной модуляции (КАМ) для передачи сигналов данных со скоростями 7200 бит/с и 9600 бит/с соответственно.
Анализируя значения U; , } , можно управлять подстройкой тактово колебания, осуществляемой в блоке 9 выделения тактового колебания. Из диаграмм следует, что в первом случае (фиг.2е) только в одном из пяти, а во втором (фиг.2з) - одно из семи возможных изменений значений LH и и,, пает поавильную информацию для подстройки тактового колебания при использовании для него только переходов через ноль демодулированного сигнала, что существенно снижает точность подстройки тактвого колебания.
Таким образом, применение двух элементов задержки,блока постоянной памяти и блока вычитания позволяет На основании анализа откорректированного сигнала эффективнее (точнее) выделять тактовое колебание в приемнике, и следовательно, повысить помехоустойчивость приема сигналов данных, сформированных однополосными и двухполосными многопо0 о иционными методами модуляции.
Технико-экономический эффект предлагаемого изобретения заключается в следующем: за счет анализа амплитуды и-полярности сигнала на выходе устройства уменьшаются краевые искажения, повышается точность выделения тактового колебания и, как следствие, повышается помехоустойчивость приема сигналов данныхJ уменьшается время вхождения в связь (время фазирования устройства ; устройство позволяет повысить точность выделения тактового колебания при прие5 ме сигналов данных, сформированных как двухполосными так и однополосны- ми многопозиционными методами модуляции.
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой приемник многопозиционных сигналов | 1986 |
|
SU1417208A1 |
| Устройство для приема сигналов с адаптивной коррекцией межсимвольной интерференции | 1979 |
|
SU866757A1 |
| Цифровой адаптивный корректорСигНАлА | 1978 |
|
SU832733A1 |
| Устройство для приема многопозиционных сигналов | 1979 |
|
SU862386A1 |
| Аналого-цифровой приемник сигналов данных | 1989 |
|
SU1635277A1 |
| Приемник сигналов с парциальным откликом | 1983 |
|
SU1117854A1 |
| Адаптивный цифровой корректор | 1979 |
|
SU794734A1 |
| Устройство для приема сигналов с парциальным откликом | 1983 |
|
SU1117855A1 |
| Устройство преобразования сигналов для передачи данных по первичному сетевому тракту | 1989 |
|
SU1739503A1 |
| Устройство адаптивного приема дискретных сигналов с амплитудно-фазовой модуляцией | 1986 |
|
SU1309319A1 |
ЦИФРОВОЙ ПРИЕМНИК МНОГОПО ЦИОННЫХ СИГНАЛОВ, содержаний после довательно соединенные полосовой фильтр и усилитель с автоматической регулировкой усиления, выхол которого подключен к первым входам первого и второго демодуляторов, вторые входы и выходы которых соединены соответственно с выходами блока выделения несущего колебания и с первыми входами первого и второго аналого-цифровых преобразоват лей, к вторым входам которых подкл чены выходы блока выцеления тактового колебания, а выходы первого . / и второго аналого-цифровых преобразователей соединены с входами цифрового адаптивного корректора, выходы которого подключены к входам решающего блока, отлич ающ и и с я тем, что, с целью повышения помехоустойчивости приема данных, передаваемых однополосными и двухполосными методами модуляции, введены два элемента задержки и последовательно соединенные блок постоянной памяти и блок ВЕЛчитания, выход которого подключен к входу блока вьщеления тактового колебания, дополнительный выход которого соединен с первыми входами блока постоянной памяти и первого и второго элементов задержки, вторые входы которых соединены с соответствующим выходом цифрового адаптивного корректора и с вторым входом блока постоянной памяти, к третьему входу которого подключен выход- первого элемента задержки, при этом выход второго элемента задержки соединен с вторым входом блока вычитания.