В известных в измерительной технике электроконтактных датчиках для автоматизации контроля ногрешностей геометрических форм фрикционная нара раснолол ена между подвижным контактом и передаточным рычагом, что при большом отклонении размера детали от размера эталона приводит к появлению значительной погрешности.
Предлагаемый датчик свободен от этого недостатка, так как в нем фрикционная нара расположена перед передаточным рычагом.
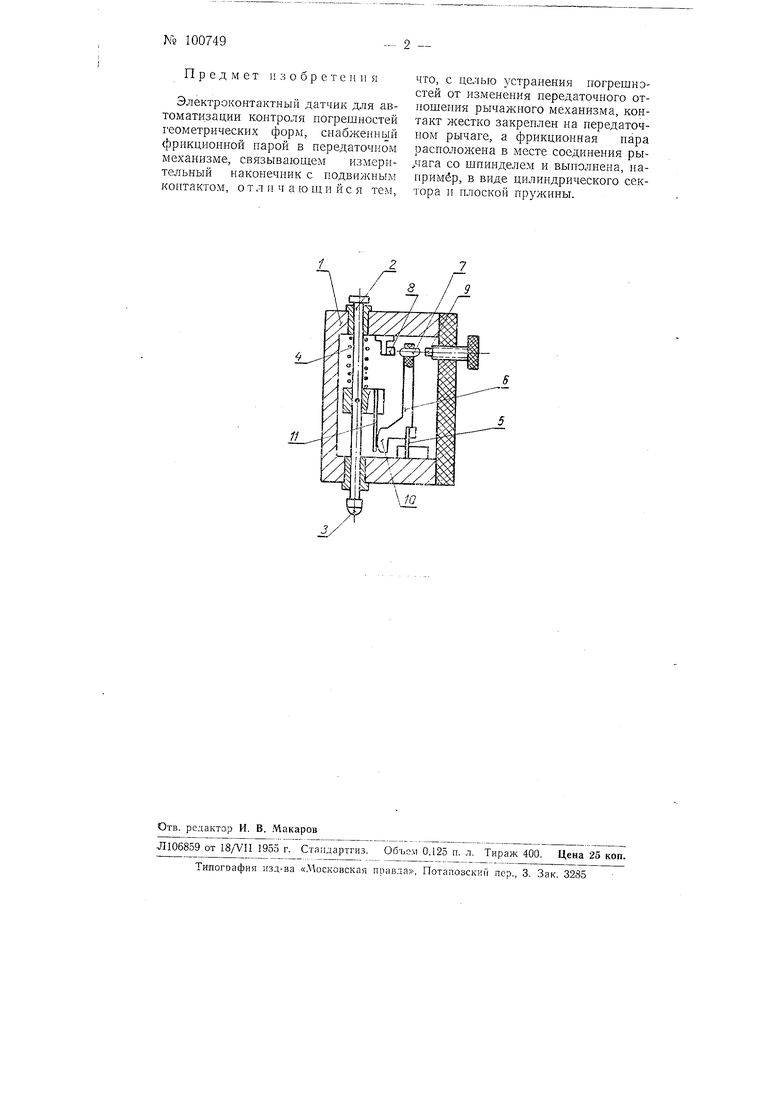
На чертеже изображена схема датчика.
Во втулках корпуса / переме дается измерительный шпиндель 2, несущий наконечник 3. Измерительное усилие создается пружиной 4.
На пружинном шарнире 5 закреплен нередаточный рычаг 6, несущий на конце электрический контакт 7. Этот контакт находится между неподвижным контактом 8 и регулируемым контактом 9.
С целью устранения погрешностей, возникающих при изменении передаточного отношения рычажного механизма, контакт 7 жестко закреплен на передаточном рычаге 6, а фрикционная пара связывает рычаг со шпинделем 2 н выполнена в виде цилиндрического сектора 10 и плоской пружины 1.
При изменении величины измеряемого размера перемещение шпинделя вызывает поворот рычага, ограничиваемый тем или иным неподвижным коптактом. При дальнейшем измене ии размера происходит проскальзывание между сектором 10 и пружииой 11 Д.О достижения наибольшего или наименьшего значения размера и, таким образом, механизм устанавливается в исходное положение.
Расстояние между неподвижным и регулируемым контактами устанав; ивается предварительно в соответствии с донустимой величиной контролируемого элемента (овальности и т. п.).
При изменении размера в обратном направлении контакт рычага отходит от одного неподвижиого контакта и приближается к другому неподвижному контакту. Если разность между наибольшим и наименьшим значением измеряемого размера меньше той, на которую настроен датчик, замыкание между коитактом рычага и вторым неподвил пым контактом не происходит, еачи больше- эти контакты замыкаются.
Предмет изобретения
Электроконтактный датчик для автоматизации контроля погрешностей геометрических форм, снабженный фрикционной нарой в нередатонгом механизме, связывающем измерительный наконечник с нодвижным контактом, отличающийся тем,
что, с целью )-страиения ногрешнэстей от изменения передаточного отношения рычажного механизма, контакт жестко закренлен на нередаточиом рычаге, а фрикционная нара расположена в месте соединения ры.лага со шпинделем и выполнена, например, в виде цилиидрического сектора и плоской пружины.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электроконтактный датчик | 1953 |
|
SU99425A1 |
| Индикатор | 1957 |
|
SU112301A1 |
| Индуктивный дифференциальный датчик | 1961 |
|
SU146958A1 |
| Машина для контроля погрешности шага резьбовых изделий | 1956 |
|
SU113076A1 |
| Измерительное устройство для контроля размеров изделий | 1953 |
|
SU99305A1 |
| Прибор для измерения длин | 1951 |
|
SU93852A1 |
| СПОСОБ КАЛИБРОВКИ ИЗМЕРИТЕЛЬНОЙ ГОЛОВКИ | 1991 |
|
RU2011153C1 |
| Стенд для изменения углов сходимости управляемых колес транспортного средства | 1981 |
|
SU1023207A1 |
| САМОУСТАНАВЛИВАЮЩАЯСЯ ИЗМЕРИТЕЛЬНАЯ СКОБА ДЛЯ КОНТРОЛЯ ВАЛОВ И ОТВЕРСТИЙ КОНТАКТНЫЛ1МЕТОДОМ | 1969 |
|
SU251215A1 |
| Станки для доводки наружных поверхностей вращения | 1988 |
|
SU1511089A1 |