ния точности измерения, передаточный механизм представляет собой зубчатую беззаэорную передачу, а привод шпинделя - гидропневмоцилиндр, соединенный с пневмоцилиндром посредством регулируемого дросселя.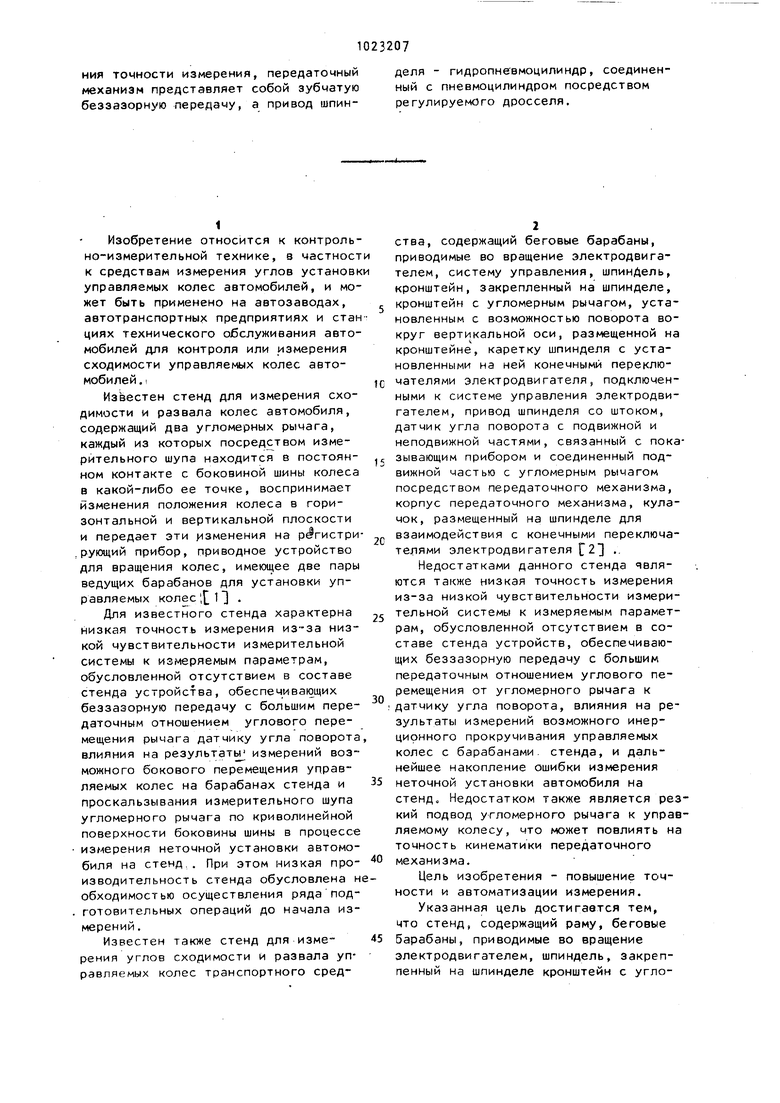
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для измерения углов сходимости и развала управляемых колес транспортного средства | 1973 |
|
SU586354A1 |
| Стенд для испытания системы управления намоточных станков | 1987 |
|
SU1483500A1 |
| Стенд для определения оптимальногоСХОждЕНия упРАВляЕМыХ КОлЕС ТРАНСпОРТ-НОгО СРЕдСТВА | 1979 |
|
SU823947A1 |
| Стенд для диагностирования технического состояния рулевого управления автомобиля | 1977 |
|
SU640164A2 |
| СТЕНД ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ УСТАНОВКИ УПРАВЛЯЕМЫХ КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА | 1994 |
|
RU2089845C1 |
| МОБИЛЬНАЯ КАРОТАЖНАЯ ЛЕБЕДКА | 2000 |
|
RU2191741C2 |
| Участок контроля технического состояния транспортных средств | 1976 |
|
SU653530A1 |
| СТЕНД ДЛЯ ПРОВЕРКИ 5\^ГЛОВ УСТАНОВКИ ^УГГРАШШМЬ1Х " ; КОЛЕС АВТОМОБИЛЯ | 1971 |
|
SU296975A1 |
| ПЕРЕДВИЖНОЙ ПРИЦЕП-СТЕНД ДЛЯ ДИАГНОСТИКИ, РЕГУЛИРОВКИ, РЕМОНТА, УСТАНОВКИ УГЛОВ СХОЖДЕНИЯ И РАЗВАЛА КОЛЕС АВТОМОБИЛЕЙ | 2010 |
|
RU2442127C1 |
| Стенд для испытания тормозов колесных транспортных средств | 1983 |
|
SU1133150A1 |

Изобретение относится к контроль но-измерительной технике, в частност к средствам измерения углов установ управляемых колес автомобилей, и может быть применено на автозаводах, автотранспортных предприятиях и стан циях технического обслуживания автомобилей для контроля или измерения сходимости управляемых колес автомобилей. Известен стенд для измерения сходимости и развала колес автомобиля, содержащий два угломерных рычага, каждый из которых посредством измерительного шупа находится в постоянном контакте с боковиной шины колеса в какой-либо ее точке, воспринимает изменения положения колеса в горизонтальной и вертикальной плоскости и передает эти изменения на р гистри .рующий прибор, приводное устройство для вращения колес, имеющее две пары ведущих барабанов для установки управляемых колес ,1 . Для известного стенда характерна низкая точность измерения низкой чувствительности измерительной системы к измеряемым параметрам, обусловленной отсутствием в составе стенда устройства, обеспечивающих беззазорную передачу с большим передаточным отношением углового перемещения рычага датчику угла поворота влияния на результаты измерений воз можного бокового перемещения управляемых колес на барабанах стенда и проскальзывания измерительного шупа угломерного рычага по криволинейной поверхности боковины шины в процессе измерения неточной установки автомобиля на стенд.. При этом низкая производительность стенда обусловлена н обходимостью осуществления ряда подготовительных операций до начала измерений . Известен также стенд для измерения углов сходимости и развала управляемых колес транспортного средства, содержащий беговые барабаны, приводимые во вращение электродвигателем, систему управления, шпинДель, кронштейн, закрепленный на шпинделе, кронштейн с угломерным рычагом, установленным с возможностью поворота вокруг вертикальной оси, размещенной на кронштейне, каретку шпинделя с установленными на ней конечными переключателями электродвигателя, подключенными к системе управления электродвигателем, привод шпинделя со штоком, датчик угла поворота с подвижной и неподвижной частями, связанный с показывающим прибором и соединенный подвижной частью с угломерным рычагом посредством передаточного механизма, корпус передаточного механизма, кулачок, размещенный на шпинделе для взаимодействия с конечными переключателями электродвигателя ,. Недостатками данного стенда являются также низкая точность измерения из-за низкой чувствительности измерительной системы к измеряемым параметрам, обусловленной отсутствием в составе стенда устройств, обеспечивающих беззазорную передачу с большим передаточным отношением углового перемещения от угломерного рычага к датчику угла поворота, влияния на результаты измерений возможного инерционного прокручивания управляемых колес с барабанами, стенда, и дальнейшее накопление ошибки измерения неточной установки автомобиля на стенд« Недостатком также является резкий подвод угломерного рычага к управляемому колесу, что может повлиять на точность кинематики передаточного механизма. Цель изобретения - повышение точности и автоматизации измерения. Указанная цель достигается тем, мто стенд, содержащий раму, беговые барабаны, приводимые во вращение электродвигателем, шпиндель, закрепленный на шпинделе кронштейн с угломерным рычагом, установленным с возможностью поворота вокруг вертикальной оси, размещенной на кронштейне, каретку шпинделя с установленными на ней конечными переключателями электродвигателя, подключенными к системе управления электродвигателем, привод шпинделя со штоком, датчик угла поворота с подвижной и неподвижной частями, связанный с показыва|8щим прибором и соединенный подвижной частью с угломерным рычагом посредством передаточного механизма, корпус передаточ ного механизма и кулачок, размещенный на шпинделе для взаимодействия с конечными переключателями электродвигателя, снабжен устройством автоматической установки нуля датчика угла поворота, включающим угловой рычаг, закрепленный на оси передаточного механизма, установленную в его корпусе, связанную с угломерным рычагом и размещенную между концами винтовой пружины, установленной соосно с угловым рычагом, зубчатую беззазорную передачу, со штырем, соединяющую неподвижную часть датчика угла поворота с концами винтовой пружины, и фрикционный дисковый тормоз с пневматическим приводом и его системой управления, диск которого соединен с неподвижной частью датчика угла поворота, а также имеющим систему управления электромагнитным тормозом беговых барабанов с кулачком, дополнительным конечным переключателем электродвигателя,установленным на раме, взаимодействующим с кулачком тормоза беговых барабанов и подключенным к системе управления злектродвигателем, конечным переключателем фриционного дискового тормоза, установленным на раме и подключенным к системе управления фрикционного дискового тормозами кулачком, установленным на штоке привода шпинделя, для взаимодействия с конечным выключателем фрикционного дискового тормоза, при этом конечные переключатели электродвигателя дополнительно подключены к системе управления тормозом беговых барабанов.
Кроме того, передаточный механизм выполнен в виде зубчатой беззазорной передачи, а привод шпинделя - в виде гидропневмоцилиндра, соединенного с пневмогидроцилиндром посредством регулируемого дросселя.
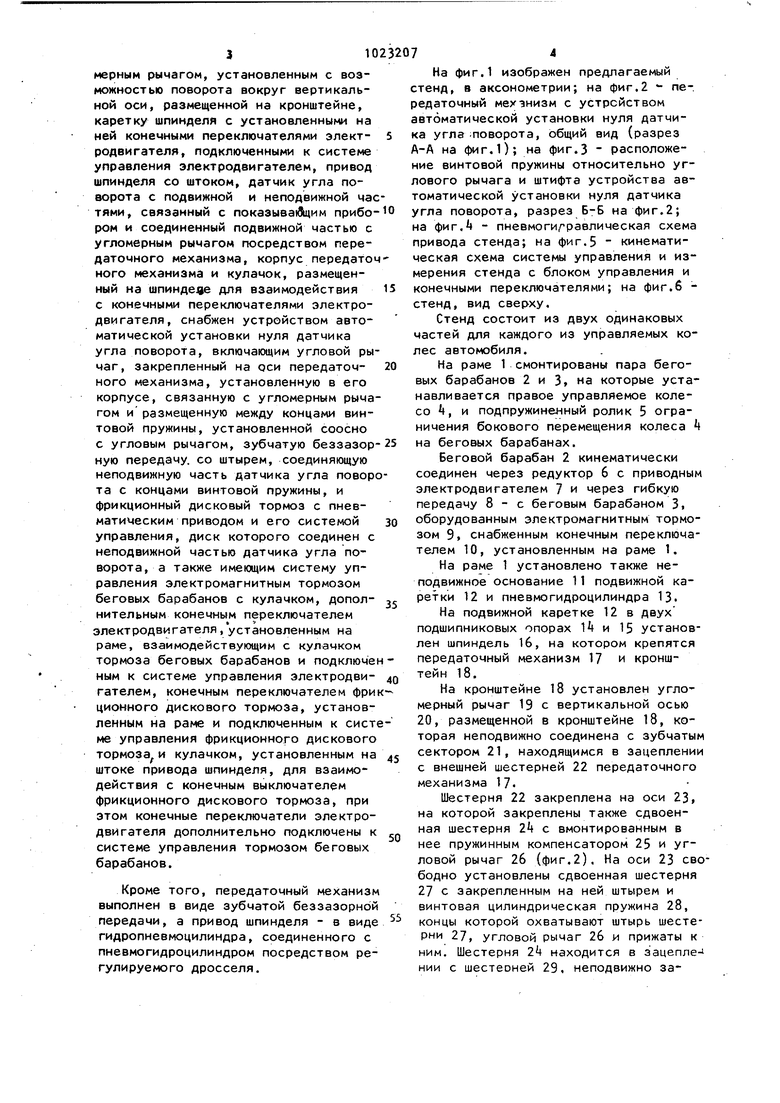
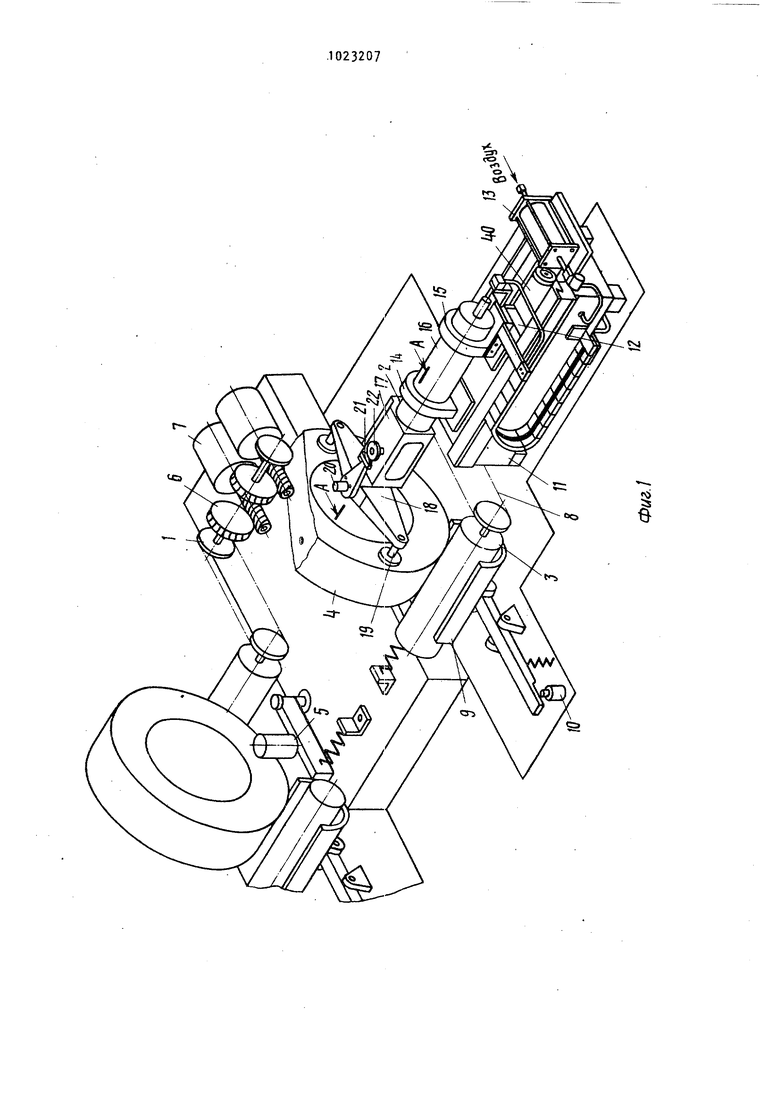
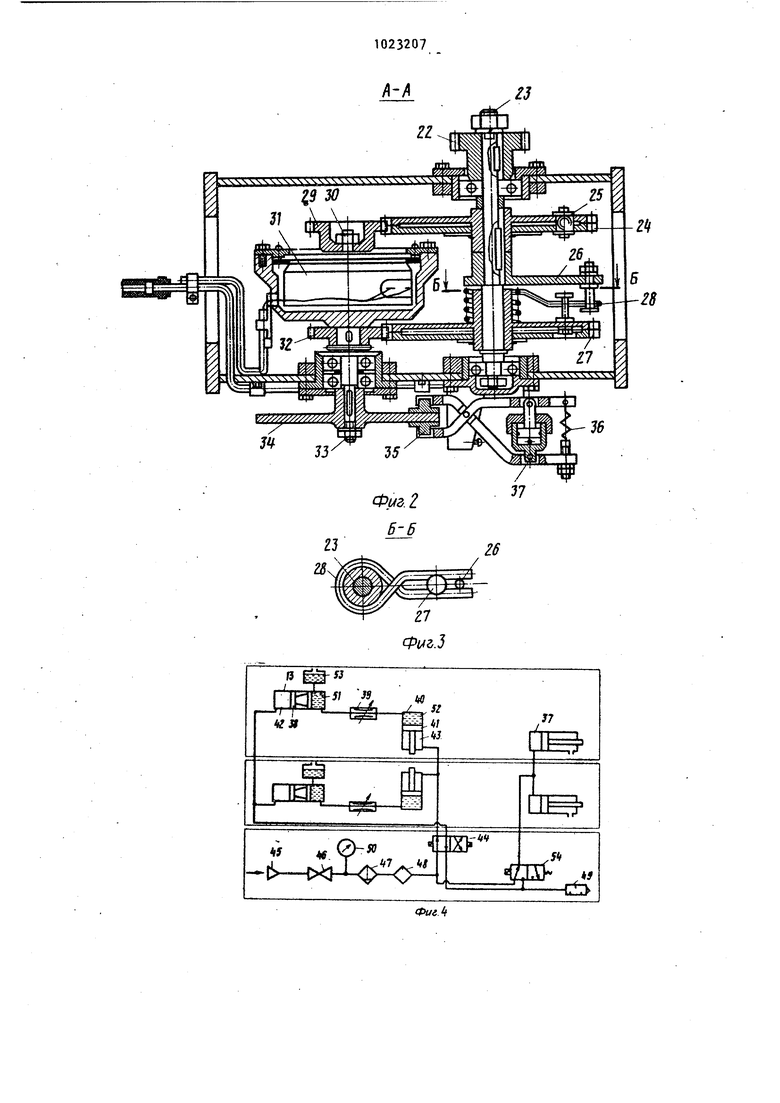
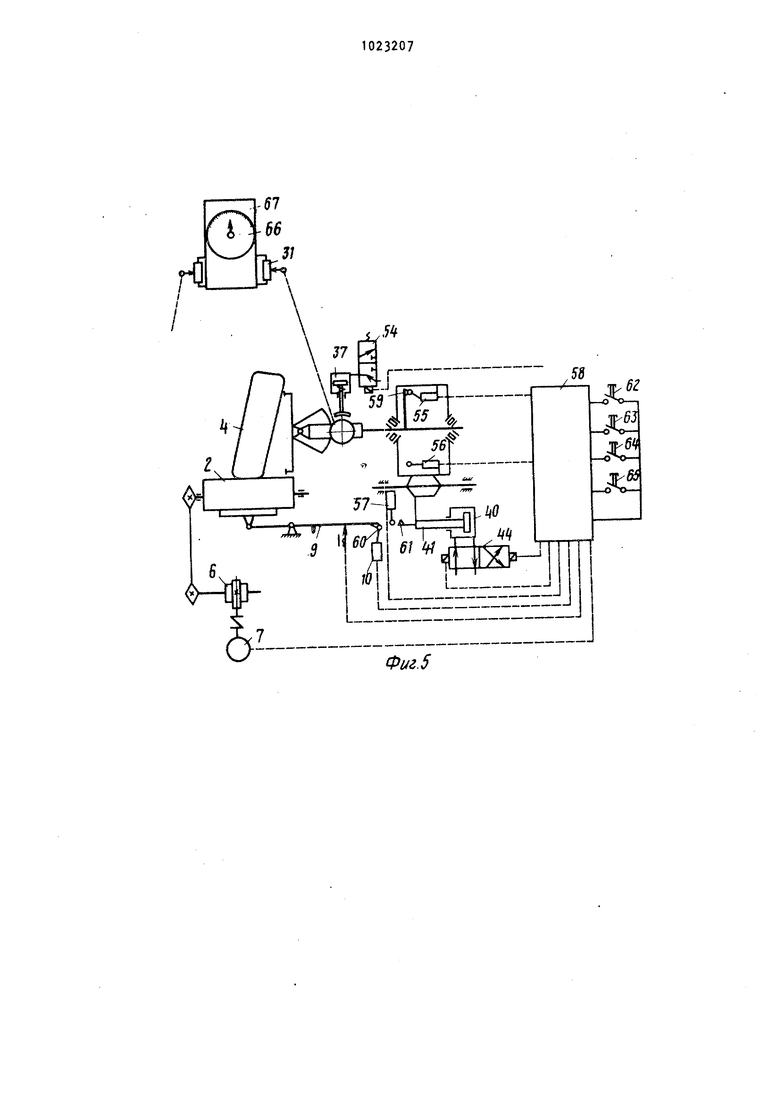
На фиг.1 изображен предлагаемый стенд, в аксонометрии; на фиг.2 передаточный механизм с устройством автоматической установки нуля датчика угла поворота, общий вид (разрез А-А на фиг.1); на фиг.З расположение винтовой пружины относительно yi- лового рычага и штифта устройства автоматической установки нуля датчика угла поворота, разрез Б-Б на фиг.2; на фиг. - пневмоги/равлическая схема привода стенда; на фиг.5 кинематическая схема системы управления и измерения стенда с блоком управления и конечными переключателями; на фиг.б стенд, вид сверху.
Стенд состоит из двух одинаковых частей для каждого из управляемых колес автомобиля.
На раме 1 смонтированы пара беговых барабанов 2 и 3 на которые устанавливается правое управляемое колесо , и подпружиненный ролик 5 ограничения бокового перемещения колеса на беговых барабанах.
Беговой барабан 2 кинематически соединен через редуктор 6 с приводным электродвигателем 7 и через гибкую передачу 8 - с беговым барабаном 3. оборудованным электромагнитным тормозом 9. снабженным конечным переключателем 10, установленным на раме 1. На раме 1 установлено также неподвижное основание 11 подвижной каретки 12 и пневмогидроцилиндра 13. На подвижной каретке 12 в двух подшипниковых опорах 1A и 15 установлен шпиндель 16, на котором крепятся передаточный механизм 17 и кронштейн 18.
На кронштейне 18 установлен угломерный рычаг 19 с вертикальной осью 20, размещенной в кронштейне 18, которая неподвижно соединена с зубчатым сектором 21, находящимся в зацеплении с внешней шестерней 22 передаточного механизма 17.
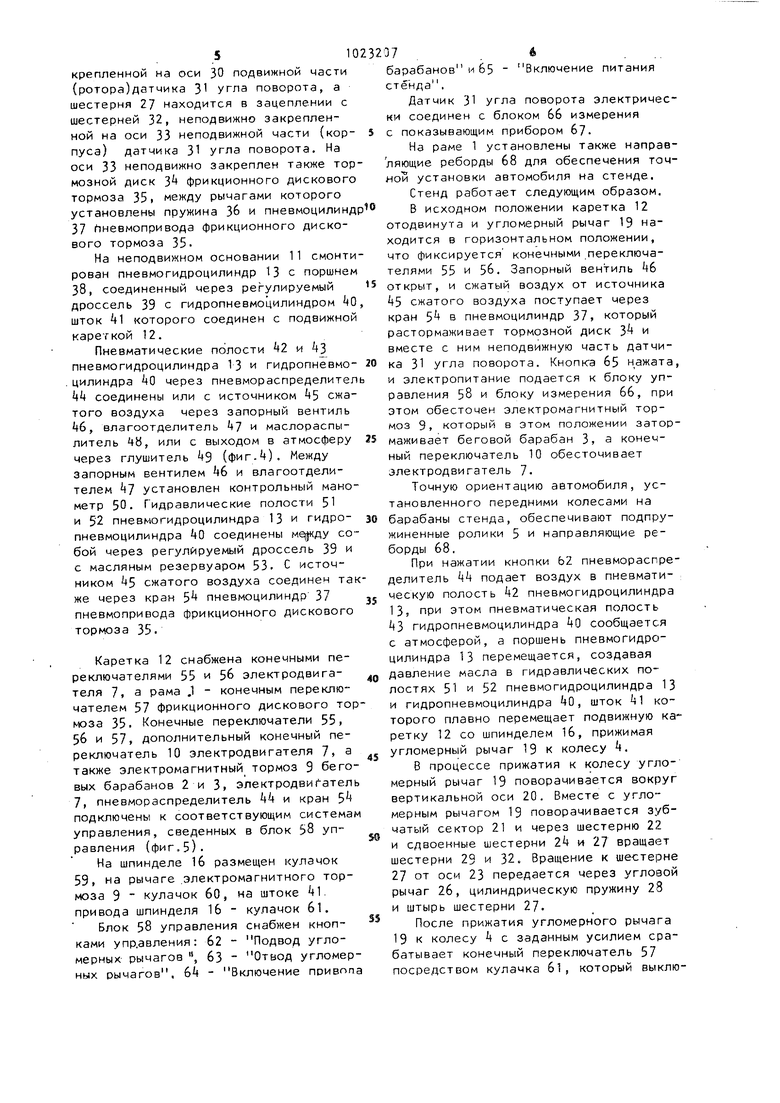
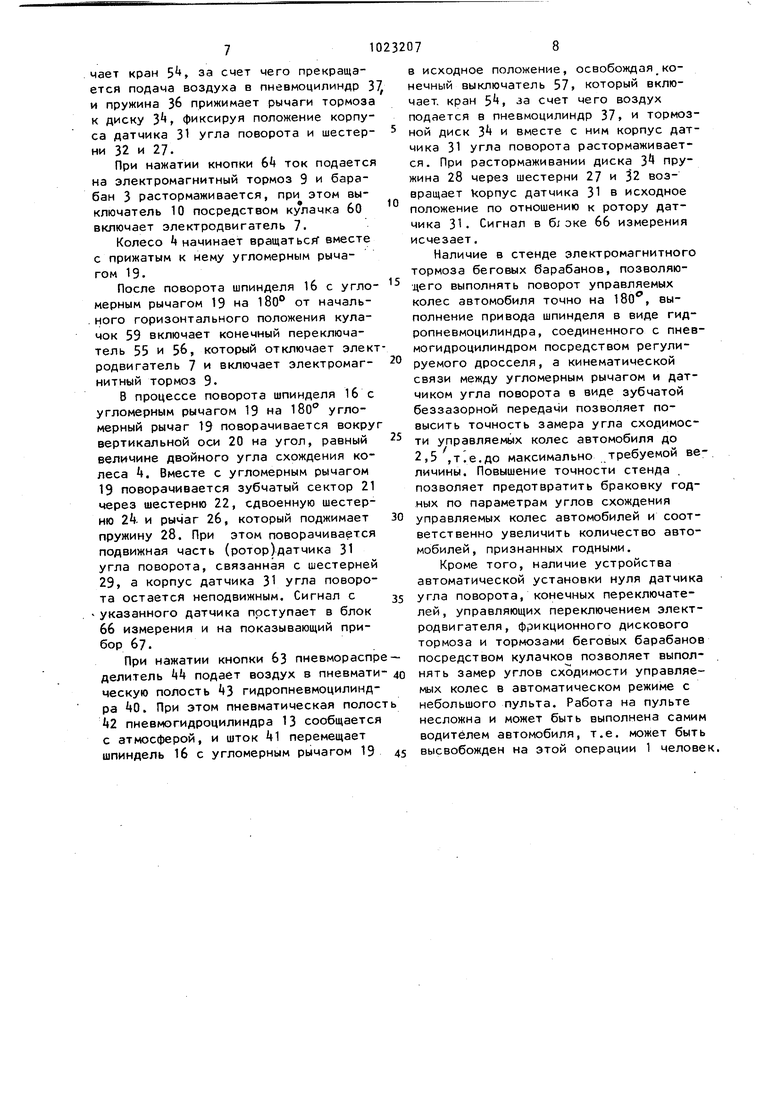
Шестерня 22 закреплена на оси 23, на которой закреплены также сдвоенная шестерня 2 с вмонтированным в нее пружинным компенсатором 25 и yi- ловой рычаг 26 (фиг.2). На оси 23 свободно установлены сдвоенная шестерня 27 с закрепленным на ней штырем и винтовая цилиндрическая пружина 28, концы которой охватывают штырь шестерни 27, угловой рычаг 26 и прижаты к ним. Шестерня 2k находится в зацепле НИИ с шестеоней 29. неподвижно закрепленной на оси 30 подвижной части (ротора)датчика 31 угла поворота, а шестерня 27 находится в зацеплении с шестерней 32, неподвижно закрепленной на оси 33 неподвижной части {корпуса) датчика 31 угла поворота. На оси 33 неподвижно закреплен также тор мозной диск З фрикционного дискового тормоза 35I между рычагами которого установлены пружина 36 и пневмоцилинд 37 пневмопривода фрикционного дискового тормоза 35. На неподвижном основании 11 смонти рован пневмогидроцилиндр 13 с поршнем 38, соединенный через регулируемый дроссель 39 с гидропневмоцилиндром 40 шток 41 которого соединен с подвижной кареткой 12. Пневматические пблости 2 и 43 пневмогидроцилиндра 13 и гидропневмоцилиндра 40 через пневмораспределител k соединены или с источником сжатого воздуха через запорный вентиль +6, влагоотделитель 7 и маслораспылитель 4Ь, или с выходом в атмосферу через глушитель 9 (фиг.4). Между запорным вентилем 6 и влагоотделителем 7 установлен контрольный манометр 50- Гидравлические полости 51 и 52 пневмогидроцилиндра 13 и гидропневмоцилиндра 40 соединены собой через регулируемый дроссель 39 и с масляным резервуаром 53. С источником 5 сжатого воздуха соединен так же через кран 5 пневмоцилиндр 37 пневмопривода фрикционного дискового тормоза 35. Каретка 12 снабжена конечными переключателями 55 и 5б электродвигателя 7, а рама ,1 - конечным переключателем 57 фрикционного дискового тор моза 35. Конечные переключатели 55, Зб и 57, дополнительный конечный переключатель 10 электродвигателя 7, а также электромагнитный тормоз 9 беговых барабанов 2 и 3, электродвигатель 7, пневмораспределитель 44 и кран 54 подключены к соответствующим системам управления, сведенных в блок 58 уп равления (фиг.5). На шпинделе 16 размещен кулачок 59, на рычаге .электромагнитного тормоза 9 кулачок 60, на штоке 41. привода шпинделя 16 - кулачок 61. Блок 58 управления снабжен кнопками упр.авления: 62 - Подвод угломерных рычагов , 63 - Отвод угломерных рычагов, 64 - Включение привопа б5 - Включение питания барабанов стенда. Датчик 31 угла поворота электрически соединен с блоком 66 измерения с показывающим прибором 67. На раме 1 установлены также направляющие реборды 68 для обеспечения точной установки автомобиля на стенде. Стенд работает следующим образом. В исходном положении каретка 12 отодвинута и угломерный рычаг 19 находится в горизонтальном положении, что фиксируется конечными переключателями 55 и 5б. Запорный вентиль +6 открыт, и сжатый воздух от источника kS сжатого воздуха поступает через кран 5 в пневмоцилиндр 37, который растормаживает тормозной диск 3 и вместе с ним неподвижную часть датчика 31 угла поворота. Кнопка 65 нажата, и электропитание подается к блоку управления 58 и блоку измерения 66, при этом обесточен электромагнитный тормоз 9, который в этом положении затормаживает беговой барабан 3, а конечный переключатель 10 обесточивает электродвигатель 7. Точную ориентацию автомобиля, установленного передними колесами на барабаны стенда, обеспечивают подпружиненные ролики 5 и направляющие реборды 68. При нажатии кнопки Ь2 пневмораспределитель k подает воздух в пневматическую полость k2 пневмогидроцилиндра 13, при этом пневматическая полость гидропневмоцилиндра 40 сообщается с атмосферой, а поршень пневмогидроцилиндра 13 перемещается, создавая давление масла в гидравлических полостях 51 и 52 пневмогидроцилиндра 13 и гидропневмоцилиндра lO, шток 1 которого плавно перемещает подвижную каретку 12 со шпинделем 16, прижимая угломерный рычаг 19 к колесу 4. В процессе прижатия к колесу угломерный рычаг 19 поворачивается вокруг вертикальной оси 20. Вместе с угломерным рычагом 19 поворачивается зубчатый сектор 21 и через шестерню 22 и сдвоенные шестерни 24 и 27 вращает шестерни 29 и 32. Вращение к шестерне 27 от оси 23 передается через угловой рычаг 2б, цилиндрическую пружину 28 и штырь шестерни 27. После прижатия угломерного рычага 19 к колесу 4 с заданным усилием срабатывает конечный переключатель 57 посредством кулачка б1, который выключает кран 5, за счет чего прекращапневмоцилиндр 3 ется подача воздуха в ,.„ и пружина Зб прижимает рычаги тормоза к диску З фиксируя положение корпуса датчика 31 угла поворота и шестерни 32 и 27. При нажатии кнопки б ток подается на электромагнитный тормоз 9 и барабан 3 растормаживается, при этом выключатель 10 посредством кулачка 60 включает электродвигатель 7. Колесо начинает вращатьсяГ вместе с прижатым к нему угломерным рычагом 19. После поворота шпинделя 1б с угломерным рычагом 19 на 180 от началь. ного горизонтального положения кулачок 59 включает конечный переключатель 55 и 56, который отключает элект родвигатель 7 и включает электрома - нитный тормоз 9. В процессе поворота шпинделя 16 с угломерным рычагом 19 на 180 угломерный рычаг 19 поворачивается вокру вертикальной оси 20 на угол, равный величине двойного угла схождения колеса . Вместе с угломерным рычагом 19 поворачивается зубчатый сектор 21 через шестерню 22, сдвоенную шестерню 2k и рычаг 26, который поджимает пружину 28. При этом поворачивается подвижная часть (ротор)датчика 31 угла поворота, связанная с шестерней 29, а корпус датчика 31 угла поворота остается неподвижным. Сигнал с указанного датчика поступает в блок 66 измерения и на показывающий прибор б7. При нажатии кнопки 63 пневмораспр делитель kk подабт воздух в пневмати ческую полость 3 гидропневмоцилиндра 0. При этом пневматическая полос k2 пневмогидроцилиндра 13 сообщается с атмосферой, и шток 41 перемещает шпиндель 16 с угломерным рычагом 19 в исходное положение, освобождая конечный выключатель 57 который включает, кран 5, за счет чего воздух подается в пневмоцилиндр 37, и тормозной диск 3 и вместе с ним корпус датчика 31 угла поворота растормаживается. При растормаживании диска 3 пружина 28 через шестерни 27 и 2 возвращает Корпус датчика 31 в исходное положение по отношению к ротору датчика 31. Сигнал в 6jоке 66 измерения исчезает. Наличие в стенде электромагнитного тормоза беговых барабанов, позволяюдего выполнять поворот управляемых колес автомобиля точно на 180, выполнение привода шпинделя в виде гидропневмоцилиндра, соединенного с пневмогидроцилиндром посредством регулируемого дросселя, а кинематической связи между угломерным рычагом и датчиком угла поворота в виде зубчатой беззазорной передачи позволяет повысить точность замера угла сходимости управляемых колес автомобиля до 2,5 Vie.до максимально требуемой величины. Повышение точности стенда позволяет предотвратить браковку годных по параметрам углов схождения управляемых колес автомобилей и соответственно увеличить количество автомобилей, признанных годными. Кроме того, наличие устройства автоматической установки нуля датчика угла поворота, конечных переключателей, управляющих переключением электродвигателя, фрикционного дискового тормоза и тормозами беговых барабанов посредством кулачков позволяет выполнять замер углов сходимости управляемых колес в автоматическом режиме с небольшого пульта. Работа на пульте несложна и может быть выполнена самим водителем автомобиля, т.е. может быть высвобожден на этой операции 1 человек.
87
be
vly
31
Eh
5S
Фиг.5
Фиг.
