Изобретение относится к технике координатных измерений и может быть использовано в координатных измерительных машинах (КИМ), измерительных роботах и станках с ЧПУ. Калибровка измерительной головки представляет собой процедуру определения компонент вектора смещения наконечника головки с оси ее вращения. Эта информация используется для определения положения центра наконечника в системе координат СКИ при любых угловых положениях корпуса головки.
Известен способ определения компонент вектора смещения центра наконечника с оси головки (относительно корпуса головки), заключающийся в определении проекций центра наконечника на оси координат системы, связанной с корпусом головки [1] .
Этот способ позволяет определить компоненты вектора смещения наконечника с некоторой условной оси, связанной с корпусом головки, но не позволяет определить смещение наконечника с оси вращения головки.
Известен также принятый за прототип способ калибровки измерительной головки на средстве координатных измерений путем определения компонент вектора смещения центра наконечника головки с оси ее вращения в заданной системе координат, заключающийся в том, что определяют координату наконечника по одной из координатных осей, поворачивают головку и вновь определяют координату наконечника на той же координатной оси, затем вычисляют значение компоненты вектора отклонения наконечника по той же координатной оси и определяют характеристику положения наконечника для определения значения компоненты вектора отклонения наконечника по другой координатной оси [2] .
Поворот головки осуществляют на 180o, а для определения координаты наконечника используют связанный с отсчетным устройством упор, момент контакта которого с наконечником фиксируют по сигналу измерительной головки. Упор выполняют в виде поверхности цилиндрического отверстия. С помощью этого способа можно легко определить компоненту вектора смещения наконечника по одной из координатный осей; для определения второй компоненты необходимо повторить приемы способа при перемещении упора по второй координатной оси. При этом сложно достичь высокой точности измерения (требуется повторная точная ориентация направления измерения по второй координатной оси), а реализация способа усложняется дополнительными перестановками измерительных устройств или использованием двойного количества этих устройств и необходимости их точной взаимной ориентации.
Цель изобретения - повышение точности и упрощение калибровки.
Для достижения поставленной цели в способе калибровки измерительной головки на средстве координатных измерений путем определения компонент вектора смещения центра наконечника головки с оси ее вращения в заданной системе координат, заключающемся в том, что определяют координату наконечника по одной из координатных осей, поворачивают головку и вновь определяют координату наконечника на той же координатной оси, затем вычисляют значение компоненты вектора отклонения наконечника по той же координатной оси, определяют характеристику положения наконечника для нахождения значения компоненты вектора отклонения наконечника по другой координатной оси, поворачивают головку на полный оборот, в ходе полного поворота определяют минимальное и максимальное значения координат наконечника по первой координатной оси, которые принимают за характеристику положения наконечника для определения значения компоненты вектора отклонения наконечника по другой координатной оси.
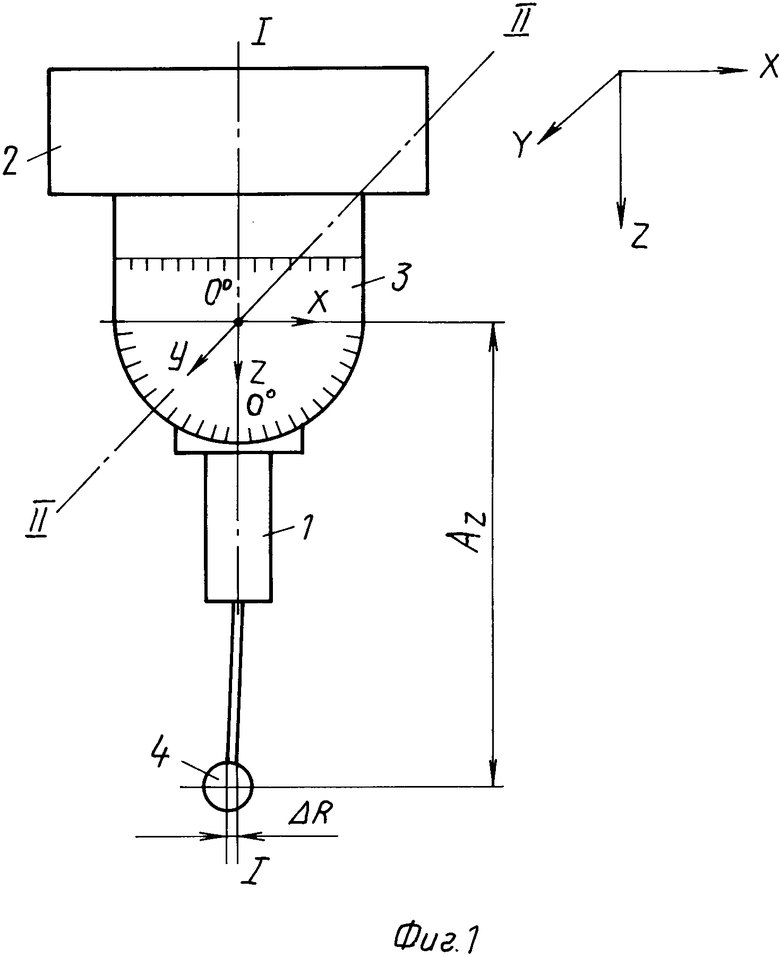
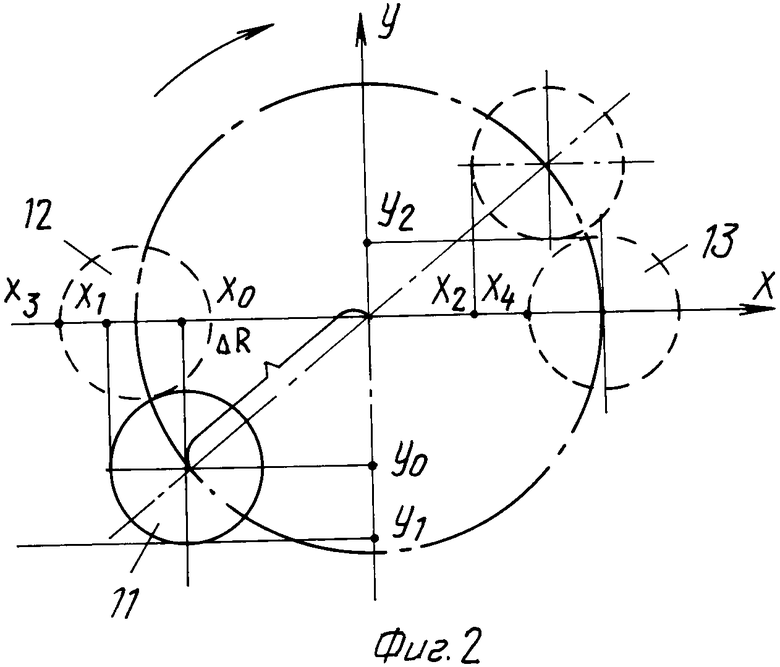
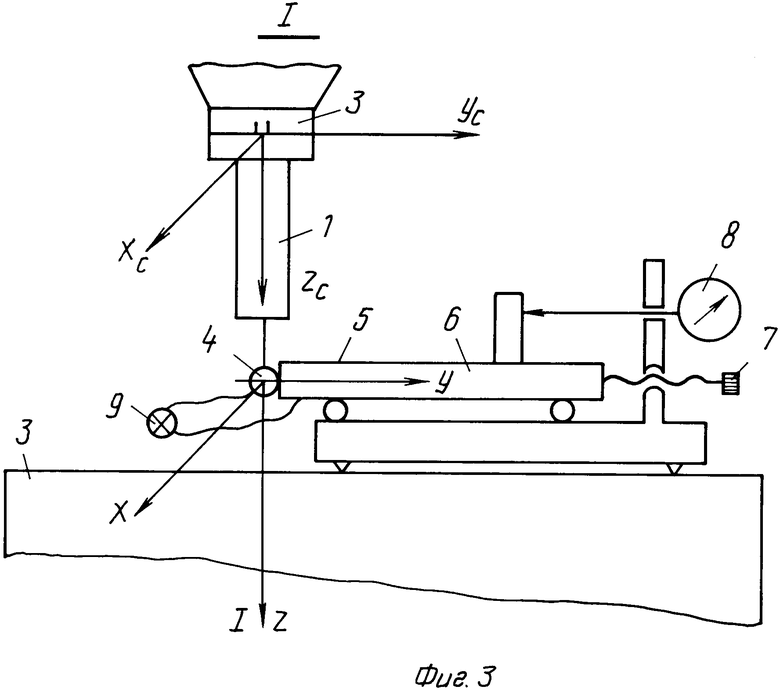
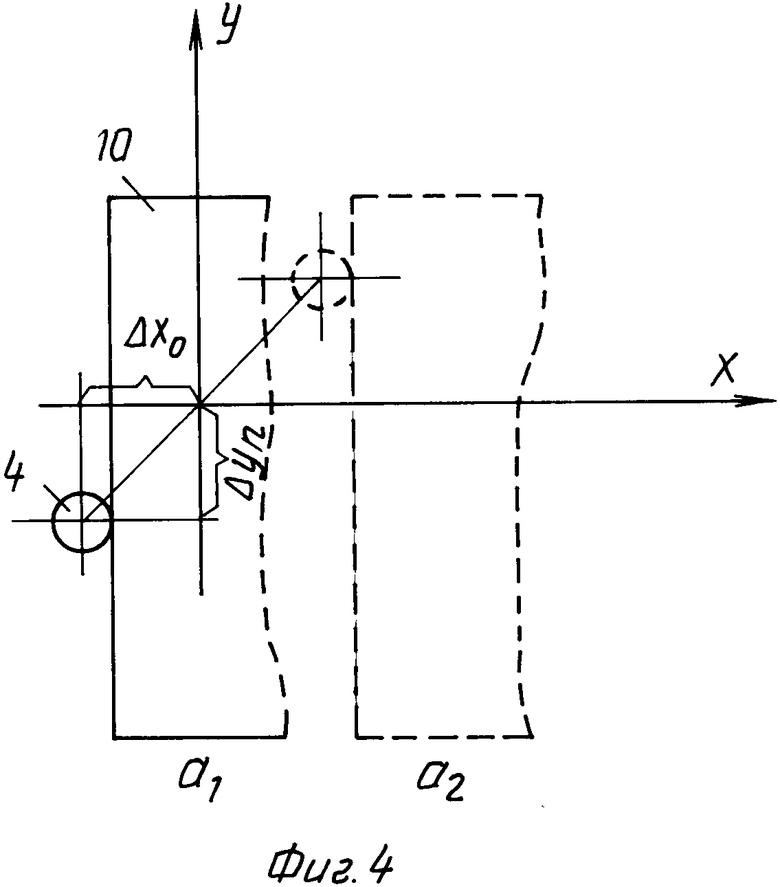
На фиг. 1 показана измерительная головка, установленная на средстве координатных измерений; на фиг. 2 - схема определения компонент вектора смещения центра наконечника с оси вращения головки; на фиг. 3 - схема получения сигнала при взаимодействии наконечника головки и упора; на фиг. 4 - то же, вид в плане.
Измерительную головку 1 устанавливают на средстве координатных измерений 2 через промежуточный поворотный узел 3 (поворотную головку КИМ, шпиндель станка или поворотную часть схвата робота. Измерительный наконечник 4 вследствие погрешностей изготовления и установки (сборки ) смещен с оси I-I поворотной головки на величину Δ R, компоненты разложения которой по осям х и у cистемы координат хуz, связанной с поворотным узлом, равны хo и уo. Смещение Аz наконечника с оси поворота II-II определяется конструкцией поворотной головки, длиной корпуса головки и длиной измерительного наконечника. Величину Аz можно определить известным способом, например, путем прямого измерения расстояния от конструктивных элементов оси II-II поворотного узла 3 до наиболее удаленной точки измерительного наконечника 4.
Для нахождения компонент вектора Δ R cмещения центра наконечника с оси I-I в плоскости хy можно использовать, например, перемещение плоского упора по одной из координатных осей х или y c отсчетом его положения в момент подачи сигнала о контакте с наконечником при различных угловых положениях головки.
Упор может быть выполнен в виде физического тела с плоской рабочей поверхностью, предназначенной для контактирования с наконечником, или бесконтактным, например оптическим, образующим теневую проекцию наконечника на приемное устройство, расположенное вдоль координатной оси.
Сигнал может быть подан или в момент достижения геометрического контакта наконечника с упором, или одновременно с подачей головкой командного сигнала (или достижения определенного уровня сигнала головки). Например, упор может быть выполнен в виде плоской поверхности 5 столика 6, оснащенного приводом, например микроподачей 7, и снабженного измерительным преобразователем 8 перемещения столика. Сигнал о геометрическом контакте поверхности 5 и наконечника 4 может быть получен с помощью электросхемы 9 по достижении заданной величины переходного сопротивления (при наружном электрическом контакте между поверхностями).
Можно выполнить упор в виде плоского наконечника 10 измерительного преобразователя 8, непосредственно взаимодействующего с наконечником 4 измерительной головки (фиг. 4). Измерительное усилие преобразователя должно быть меньше измерительного усилия головки в плоскости хy.
Вместо столика с микроподачей можно использовать линейные направляющие средства координатных измерений.
Для определения минимального и максимального значений координат наконечника измерительной головки поворот головки и перемещение упора можно осуществлять дискретно (используя, например, столик с микроподачей) или непрерывно, используя плоский наконечник измерительного преобразователя с меньшим чем у головки измерительным усилием.
Перед началом измерений наконечник 4 измерительной головки занимает положение 11. Задавая направление координатных осей системы координат хy, в которой требуется определить компоненты вектора Δ R смещения наконечника, ориентируют плоскость упора 10 перпендикулярно одной из осей, (например х (фиг. 4). Далее перемещением упора до сигнала (или до остановки упора при касании наконечника головки в случае использования измерительного преобразователя с меньшим чем у головки измерительным усилием) определяют координату х1 наконечника (положение 11), поворачивают головку вокруг оси I-I (фиг. 1) в любом выбранном направлении, например показанном на фиг. 2, фиксируют минимальное значение координаты наконечника х3 (положение 12), продолжают поворачивать головку, фиксируют максимальное значение координаты наконечника х4 (положение 13), продолжают поворачивать головку до возвращения в исходное положение. Минимальное значение координаты х3 и максимальное значение координаты х4 принимают за характеристику положения наконечника для определения значения компоненты вектора отклонения наконечника по оси У.
Далее определяют модуль вектора смещения наконечника.
ΔR =  . Компоненты вектора смещения хo, уo находят следующим образом:
. Компоненты вектора смещения хo, уo находят следующим образом:
xo = Δ R - (x1 - x3);  Y
Y =
= 
Знак yo определяют по характеру измерения координаты х при вращении головки для нахождения Δ R. Для положения 11 наконечника (фиг. 2) при вращении головки по часовой стрелке значение координаты х изменяется от х1 к х3 и к х4 - наконечник лежит в третьем квадранте Y
Y = -
= - .
.
Ориентация упора только по одной оси повышает точность измерения и упрощает его реализацию. (56) 1. Авторское свидетельство СССР N 51822, кл. G 01 B 5/03, 1937.
Инструкция Rос. Т Datuming of machine tool prlbes Renishan electrical limited, 1981, p. 71.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ НАКОНЕЧНИКА ИЗМЕРИТЕЛЬНОЙ ГОЛОВКИ РОБОТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2009881C1 |
| НАКЛАДНОЙ ПРИБОР ДЛЯ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ЦИЛИНДРИЧЕСКОЙ ПОВЕРХНОСТИ КРУПНОГАБАРИТНЫХ ДЕТАЛЕЙ | 1996 |
|
RU2180428C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ НАКОНЕЧНИКА ИЗМЕРИТЕЛЬНОЙ ГОЛОВКИ РОБОТА | 1990 |
|
RU2009882C1 |
| Способ калибровки мобильных 3D-координатных средств измерений и устройство для его реализации | 2018 |
|
RU2710900C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ И НАПРАВЛЕНИЯ СКОРОСТИ ТЕПЛОНОСИТЕЛЯ | 2007 |
|
RU2360257C1 |
| УСТРОЙСТВО КАЛИБРОВКИ АВТОМОБИЛЬНОЙ ПЛОЩАДКИ РЕГУЛИРОВОЧНЫХ СТЕНДОВ | 2005 |
|
RU2352897C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАССЫ И КООРДИНАТ ЦЕНТРА МАСС ТЕЛА В ЗАДАННОЙ ПЛОСКОСТИ | 2010 |
|
RU2448336C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ И ФАЗЫ ДИСБАЛАНСА | 2006 |
|
RU2310178C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ И ФАЗЫ ДИСБАЛАНСА | 2002 |
|
RU2237878C2 |
| УСТРОЙСТВО И СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ РЕЗЬБЫ | 2009 |
|
RU2477453C1 |
Изобретение относится к техническим измерениям в машиностроении и может быть использовано в координатных измерительных машинах и измерительных работах. Цель изобретения - повышение точности и упрощение реализации способа. Измерительную головку устанавливают на средстве координатных измерений через промежуточный поворотный узел, перемещением упора до сигнала определяют координату наконечника по одной из координатных осей системы координат, в которой требуется определить компоненты вектора смещения центра наконечника головки с оси ее вращения, поворачивают головку и вновь определяют координату наконечника на той же координатной оси, поворачивают головку до полного оборота, в ходе полного поворота фиксируют максимальное и минимальное значения координат наконечника по той же оси и определяют значения компонент вектора отклонения наконечника. 4 ил.
СПОСОБ КАЛИБРОВКИ ИЗМЕРИТЕЛЬНОЙ ГОЛОВКИ на средстве координатных измерений путем определения компонент вектора смещения центра наконечника головки с оси ее вращения в заданной системе координат, заключающийся в том, что определяют координату наконечника по одной из координатных осей, поворачивают головку и вновь определяют координату наконечника на той же координатной оси, затем вычисляют значение компоненты вектора отклонения наконечника по той же координатной оси, определяют характеристику положения наконечника для значения компоненты вектора отклонения по другой координатной оси и вычисляют значение компоненты вектора отклонения наконечника по другой координатной оси, отличающийся тем, что, с целью повышения точности и упрощения калибровки, поворачивают головку на полный оборот, в ходе полного поворота определяют минимальное и максимальное значения координат наконечника по первой координатной оси, которые принимают за характеристику положения наконечника для определения значения компоненты вектора отклонения наконечника по другой координатной оси.
