2. Механическая система по п. 1, отличающаяся тем, что, с целью расширения диапазона исследований влияния жесткостных, демпфирующих и инерционных параметров на уровень вибраций, между поворотными планками и корпусом расположены сменные упругие элементы, демпферы и массы.


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство "нева" для отрезки детали на токарном станке | 1982 |
|
SU1074660A1 |
| Однокоординатная установка для исследования динамики процесса резания | 1982 |
|
SU1024162A1 |
| Устройство для точения | 1986 |
|
SU1337199A1 |
| СПОСОБ ДИАГНОСТИКИ ЭЛЕМЕНТОВ ЗАМКНУТОЙ ДИНАМИЧЕСКОЙ СИСТЕМЫ ТОКАРНОГО СТАНКА | 1997 |
|
RU2146585C1 |
| Сборный резец для тяжелого резания | 1983 |
|
SU1138253A1 |
| Тензометрический динамометр | 1981 |
|
SU1000800A1 |
| Устройство для получения корня стружки | 1985 |
|
SU1281344A1 |
| УСТРОЙСТВО ПРЕЦИЗИОННОГО ПЕРЕМЕЩЕНИЯ РЕЖУЩЕГО ИНСТРУМЕНТА | 2024 |
|
RU2835217C1 |
| СПОСОБ ВИБРАЦИОННОГО РЕЗАНИЯ И ВИБРАЦИОННЫЙ РЕЗЕЦ | 2007 |
|
RU2356700C1 |
| Способ ультразвукового точения и устройство для его реализации | 1989 |
|
SU1685687A1 |

V , .
Изобретение относится к области станкостроения и преимущественно может быть использовано для изучения динамических явлений при точении и фрезеррвании. . ;
Известна механическая система для исследования вибраций при резании, содержащая корпус и держатель для закрепления режущего инструмента или заготовки, к которому присоединены стержни одинаковой длины и поперечного сечения, причем стержни, перпендикулярные плоскости перемещения держателя, соединены с корпусом, а стержни, параллельные этой плоскости, соединены с пружинными элементами U 1
В известной системе между перемещениям режущей кромки резца в трех взаимно перпендикулярных направлениях имеют место координатные . Расположение главной режущей кромки на значительном paccтoяниJи от центра инерции резцедержателя в процессе резания приводит к его вращению. Следствием ЭТОГО-является, в частности, изменение главного угла в плане и-существенное искажение изучаемого про цесса резания. В этом случае для полчения достоверной информации и правильного ее анализа требуется создание довольно сложной математической модели, учитывающей наличие выше рассмотренных координатны с связей. Кроме того, возможности известной установки ограничены. Она не предназначена для изучения динамических явлений при фрезеровании, для имитации вариантов механических систем, для иследования влияния на уровень вибраций их жесткостных, демпфируюи их и инерционных свойств, которые могут изменяться в широких пределах.
Целью изобретения является повышение точности исследований путем обеспечения устройству для закрепления резца или обрабатываемой заготовки только двух степеней свободны по
ортогональным направлениям и расширение возможности исследований влияния жесткостных, демпфирующих и инерционных параметров механической системы на уровень вибраций. I Эта цель достигается тем что в механической системе, -содержащей корпус и держатель для закрепления режущего инструмента или обрабатываемой заготовки, к которому присоединены стержни одинаковой длины и поперечного сечения, причем стержни, перпендикулярные плоскости перемещения устройства, соединены непосредственно с корпусом, а стержни, паралллельные этой плоскости, соединены с пружинными элементами, пружинные элементы выполнены в виде планок, связанных с корпусом через упругий шарнир, ось которого лежит
в плоскости планки и параллельна плоскости перемещения держателя, а последНИИ стержнями и поворотными планками образуют конструкцию, имеющую симметрию вращения ч вгвертого порядка.
На фигГ 1 изображена механическая ;система в-аксонометрической проекции; на фиг. 2 - сечение механической системы плоскостью Р точении;
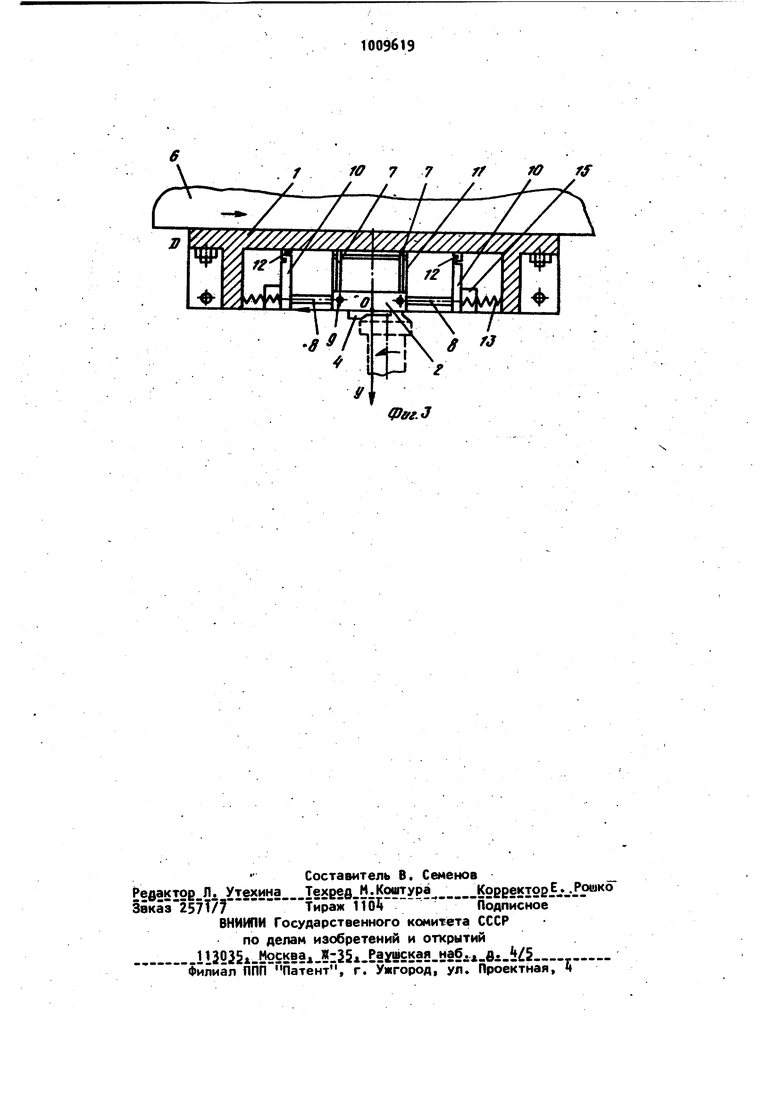
на фиг. 3 - сечение механической системы плоскостью Р Р2з4 Р зеровании.
Механическая система содержит корпус 1 и деражтель 2, в которомпри
35 исследовании вибраций при точении закрепляется резец 3, а при исследовании вибраций при фрезеровании - заготовка i. При точении установка базируется на суппорте 5 станка плоскостью АВСЭ, а при фрезеровании на столе 6 станка плоскостью CDEF. К держателе 2 жестко присоединены двенадцать стержней 7, 8, 9 одинаковой длины и поперечного сечения. Концы стержней 7 соединены непосредственно с корпусом 1. Стержни 8 и 9 взаимно перпендикулярны и соединены с
пружинными лэлементами, выполненными в виде планок., Ю и 11., Каждая планка 10 и 11 связана с корпусом 1 через упругий шарнир 12 с осью, лежащей в плоскости планки. Стержни 8, 9 s и планки 10 и 11 относительно в.ыбранной неподвижной системы координат расположены так, что при условном вращении конструкции, состоя;«цей из стержней и планок, вокруг оси to О,, на уголои 90 . (п- k), конструкция полностью совмещается со своим исходным положением. Так как h , такая конструкция обладает симметрией вращения с осью симметрии is четвертого порядка. Между поворотными планками Ю, 11 и корпусом 1 расположены сменные упругие элементы 13 демпферы и массы 15
Под действием прилсякенных креЗце 3 ли заготовке сил резания по двум ртогональным направлениям наблодаетя изгибная деформация четырех стержней 7, непосредственно соединенных с корпусом 1, и стержней 8, 9. кото- 25 рые поворачивают планки 10 и 11 а упругих шарнирах 12, А так как оси всех шарниров 12 лежат в плоскости своих планок и параллельны плоскости Охг, то держатель 2 с резцом 3 или заго- зо товкой k будет перемешаться поступательно. При этом плоскость Р0 держателя 2 которой параллельны стержни 8 и 9I оказывается всегда параллельной Плоскости Охг.. Такое движение обес- 35 печено тем, что все стержни имеют одинаковую длину и поперечное сечение. Планки 10 и 11 с упругими шарнирами выполняют еще одну очень важную функцию. Они препятствуют врацению держа- о теля 2 вокруг оси 0:. Для исключения J крутильных коле&аний держателя 2 вокруг оси 0: резец 3 или 3iaготовку 4 следует устанавливать так, чтобы линия действия силы резания, приложен- . ная к резцу или заготовке, пересекала ось Оу. Практически выполнить такое условие не только для динамического, но и для стационарного процесса резания невозможно. Поэтому держатель 2 от кручения вокруг оси 0: сто- порится восьмью стержнями 8, 9 и . планками 10, 11, имеющими упругие шарниры 12. Причем планки 10, 11 и упругие шарниры выполнены весьма жесткими на кручение от пар сил, переда- ваемых через стержни 8 и 9. Наличие планок 10 и 11.с упругими шарнирами, препятствующих кручению держателя 2,
делает возможным без потери точности исследований осуществлять изучение динамических явлений при резании, когда имеет место внецентренное приложение сил резани1я. Стержни 7i 8, 9 и упругие шарниры 12 определяют минимальные жесткости механической системы вдоль осей Ох и Oz. Для обеспе чения механической системе одинаковых жесткостных и массовых параметров по двум ортогональным направлениям стержни 7, 8, 9 имеют одинаковую длину и поперечное сечение и вместе с планками 10 и 11 расположены симметрично относительно осей Ох и Oz. Такая конструкция из ппанок и стержней имеет ось симметрии четвертого порядка. Кро ме перемещений вдоль осей Ох и Ог держатель 2 перемещается также и вдоль оси 0. Однако это перемещение Можно не учитывать, так как по сравнению с перемещением с плоскости OXZ оно является величиной порядка . ( , где X и 2 - перемещения вдоль соответствующих осей, ё 1 длина стержней. Например, если X 2 0,1 мм, а 1 50 WM, то у.ег 2 0,0002 мм.
В предлагаемой системе предусмотрено регулирование жесткостей. Для этого между поворотными планками 10, 11 и корпусом 1 устанавливаются линейные и нелинейные упругие элементы 13 (.консольные балки, пружины. Жесткости по осям X и z можно изме-. нять как на равные, так и на неравные величины. Если упругие элементы устанавливать.у планок 10, то (удет изменена жесткость только вдоль оси Ох. Аналогично можно изменить жесткость только вдоль оси Oz. Упругие свойства установки по осям Ох и OZ , могут быть неодинаковыми за счет различной жесткости упругих шарниров поворотных планок. Для варьирования параметров демпфирования в механической систре между поворотными планками 10, 11 и корпусом 1 устанавливают демпферы сухого трения, гидравлические или вязко-пластические. Инерционные свойства механической системы в рассматриваемом состоянии; по осям Ох и Oz одинаковы и определяют-. ,ся массами держателя 2 с резцом 3 или заготовкой Ц и двух планок 10 и 11. Однако можно изменять массу системы путем закрепления на планках 10, 11 со стороны корпуса дополнительных масс 15 из свинца или же510леза. Подобные грузы можно крепить также непосредственно на держателе 2. В этом случае увеличивается масса механической системы, а ее инерционные свойства по осям Ох и 02. остаются одинаковыми. Измерение параметров вибрации дер жателя 2 с резцом 3 или заготовкой выполняются стандартными приборами, применяемыми в экспериментальной тех никео Технические преимущества предложенной системы зак/ючаются в малом взаимном влиянии перемещений устройства с резцом или заготовкой в двух ортогональных направлениях. Так при приложении вектора силы в направ лении, параллельном одной из главных осей симметрии устройство будет такж перемещаться и в перпендикулярном на правлении, однако, это перемещение не будет превышать 0,5.. .0,15 от ос новного перемещения. Такая малая величина взаимного влияния говорит о высокой точности измерений динамических параметров механической системы при резднии. Конструктивные особенности предлагаемой механической cиcteмы, и в частности, поворотные планки практически исключают крутильные колебания устройства и обеспечивают только плоско-поступательное его перемещение. Механическая система может быть применена как непосредственно при измерении процес са резания, так и при исследовании влияния жесткостных, демпфирующих и инерционных параметров системы на 6 процесс точения или на процесс фрезерования. Предлагаемая механическая система позволяет производить исследова- . ния процессов резания при точении и фрезеровании с высокой точностью и производительностью, легко перенала,живается и универсальна. На ней с высокой степенью точности легко реализуется большое число новых и хорошб известных механических систем, которые обычно используются в теоретических исследованиях вибраций при резании металлов. Механическая система с выше перечисленными признаками спроектирована, изготовлена и используется при экспериментальных исследованиях вибраций при резании. Ее основные параметры: габаритные размеры 330 х X 330 X 250 мм; стержни из ОХНЭМФА, диаметр 6 мм, длина 80 мм, твердость HRC ...50. Концы стержней имеют крепление типа жесткой заделки. Масса держателя 2 может изменяться от 1 до 10 кг, дополнительно на ней может крепиться масса до 20 кг. Жесткости 10 по осям X и т:могут изменяться от 100 до 5000 кгс/мм. Взаимное влияние перемещений держателя 2 с резцом 3 или заготовкой k в направлении осей X иг практически отсут ствует, так как перемещение устройства по оси 02(,ОхД равное 0,6 мм, под действием силы, приложенной к резцу, вызывает смещение его по оси Ох(02)всего на О.,005...0,008 мм.
Я7 /,f
//
CPffg.3
